某型直升機著陸燈結構優化設計及動力學仿真
2022-10-25 12:17:06王林軍丁仕豪劉尚武
計算機仿真 2022年9期
王林軍,丁仕豪,*,劉尚武,張 東
(1. 蘭州理工大學機電工程學院,甘肅 蘭州 730050; 2. 蘭州萬里航空機電有限責任公司,甘肅 蘭州 730070; 3. 蘭州理工大學能源與動力工程學院,甘肅 蘭州 730050)
1 引言
作為直升機的重要子系統之一,照明系統是直升機復雜氣象條件下或夜間時不可缺少的條件。著陸燈作為直升機外部照明設備由于受到風阻、外部振動等載荷作用,工作環境非常惡劣。現有的著陸燈都只能單一的通過人工調節照射位置,而直升機在降落過程中飛行姿態的改變會使照射位置發生偏移,不能很好的滿足降落需求。因此設計一款具有自穩功能的著陸燈具有極為重要的實際意義。
云臺結構作為一種穩定防抖結構在軍用武器及攝像行業被大量運用。21世紀以來,隨著互聯網技術和各類新型控制方法等相關領域技術的突破,云臺在機器人、無人機等新興領域也被大量應用。
通過攝像機轉動云臺和無人機上搭載的穩定云臺結構的啟發,通過引入云臺來實現著陸燈的自穩調節功能。縱觀國內云臺生產廠家,大多數生產的云臺都用于攝像機、監視器,并沒有用于照明系統的云臺機構。
文章依托原有著陸燈結構,在此基礎上優化,通過設計一種符合技術要求的云臺結構,利用CATIA進行建模,之后后通過ANSYS workbench對所設計結構進行仿真,驗證結構強度是否符合設計要求以及直升機的隨機振動要求。
2 著陸燈的技術要求及工作原理
2.1 技術參數要求
該著陸燈是針對某型號軍用直升機所設計,考慮到其安裝位置、重量要求、運動范圍、穩定精度、搜索功能和新增的自穩功能等各方面因素,部分相關技術參數要求具體如表1所示。
2.2 著陸燈工作原理
收放部件工作時,收放電機工作,通過二級直齒輪、一級圓錐齒輪和四級行星齒輪組成的減速器帶動在12s完成收放,并通過凸輪結構按壓開關按鈕來控制收放的極限位置,從而實現0~110°的收放限位。
旋轉搜索時,旋轉伺服電機通過減速器提高扭矩帶動云臺結構左右旋轉,使之滿足直升機以320km/h速度飛行時的風載下的旋轉搜索,通過控制伺服電機轉速實現旋轉時間要求。燈頭部分內置俯仰伺服電機在搜索到目標照明位置后與旋轉伺服電機聯合控制實現自穩調節功能。
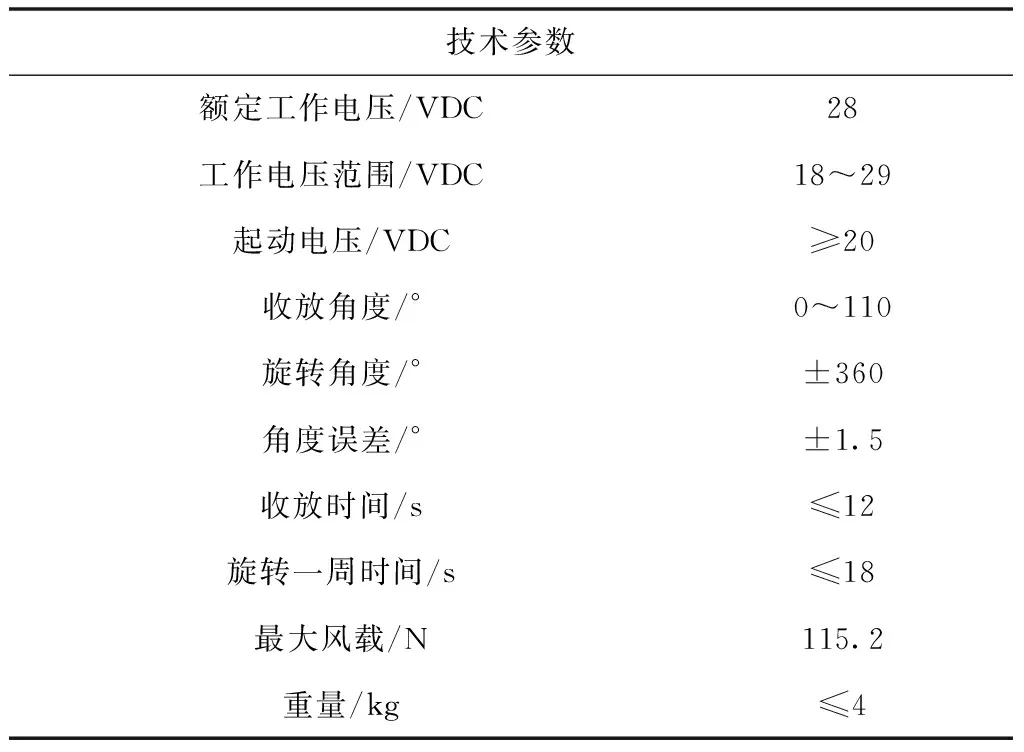
表1 技術參數表
3 著陸燈結構改進設計及三維模型的建立
改進前著陸燈主要由收放部件和旋轉部件兩部分構成。收放部件由直流電機通過減速器減速帶動著陸燈實現收出和放回功能,同時通過凸輪結構按壓開關滿足收放極限位置的控制。收回極限位置時,通過底板位置安裝的橡膠塊擠壓,滿足限位和減小傳動間隙的作用。由于橡膠塊存在易老化、彈力有限等缺陷,效果不甚理想。旋轉結構也由直流電機通過減速器減速帶動燈頭旋轉。著陸燈燈頭通過螺栓和旋轉部件直連,著陸燈僅可通過旋轉電機調整照射位置,不可隨實際需求調節燈頭俯仰角度,并且燈頭會因旋轉次數增加而出現松動甚至脫落現象。
改進后結構保持原有收放部件不變,將旋轉部件的直流電機由伺服電機代替,同時增加云臺結構。旋轉輸出軸控制云臺結構旋轉從而間接控制燈頭旋轉。在燈頭內部添加一組控制俯仰調節的伺服電機,通過該電機實現燈頭俯仰調節的需求,同時在完成搜索后可與旋轉伺服電機共同控制實現自穩調節功能。在安裝底板上,增加機械限位器代替原有橡膠塊。
因燈頭需承受較大風載,故對伺服電機輸出扭矩要求較大。伺服電機輸出轉速可直接調節,但轉速降低時輸出扭矩也會隨之減小,故需保持伺服電機輸出轉速一定,通過減速器減速,增大扭矩;除此之外,由于給定內部空間的限制,普通漸開線圓柱齒輪減速器無法實現設計要求,故此選用NGW型行星減速器。NGW型行星減速器體積小、重量輕,與普通漸開線圓柱齒輪減速器相比可縮小一倍,重量不到其一半。
經測量燈頭旋轉半徑r=62.5mm,當直升機以320km/h的速度飛行時,著陸燈所受最大風載為F=115.2N。
由公式計算可得最大轉矩T
=·=1152×0063=7.258N·m
所選伺服電機輸出額定扭矩為0.18N·m,額定轉速為100r/min,計算可知減速比為40.32。
根據《機械設計手冊》,決定采用三級行星減速器,一級二級傳動比均為4.5,三級傳動比為2,總傳動比為40.5,符合減速比需求。第一級和第二級太陽輪齒數為19,行星輪齒數為20,第三級太陽輪齒數為32,行星輪齒數為13,外齒圈齒數為58。設計的減速器如圖1所示。
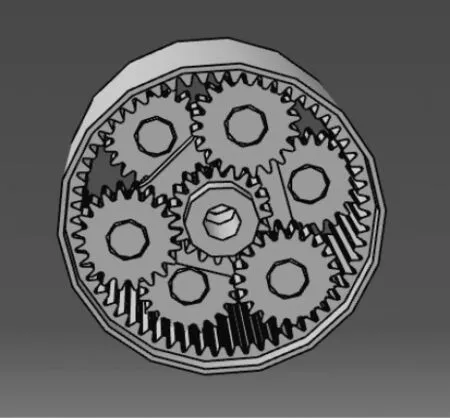
圖1 三級NGW型行星減速器
考慮到整體重量問題,云臺架整體采用薄壁結構,在保證強度的同時,減輕重量。燈頭部分,采用偏心結構,在保證最大光源面積的同時,將俯仰伺服電機置于燈頭組件內部并為光源預留下足夠空間。
機械限位裝置通過彈簧結構代替原有橡膠塊,在底板上增加機械限位裝置如圖2所示。通過限位,減小因傳動間隙而造成的振動對整體部件壽命的影響。
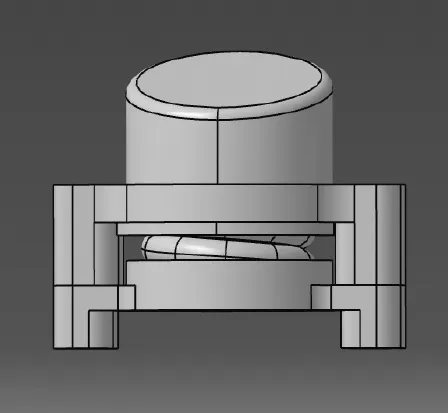
圖2 后限位裝置
改進后,在CATIA中完成各零件三維模型的繪制和著陸燈的裝配,裝配完成后著陸燈三維模型如圖3所示。
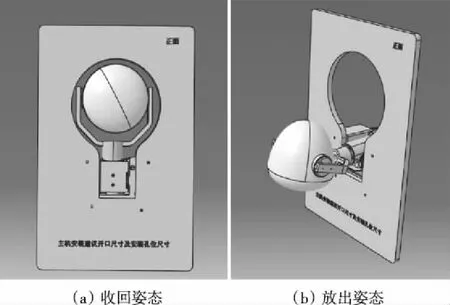
圖3 著陸燈三維模型圖
4 改進結構的動力學分析
4.1 材料選擇及網格劃分
殼體及云臺等主要部件采用航空常用鋁合金LY12,齒輪等關鍵傳動部件采用40CrNiMoA合金鋼,材料參數如表2所示。
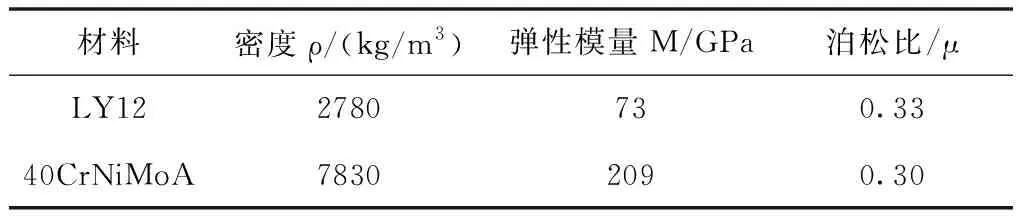
表2 各項材料參數
網格劃分質量會對有限元分析的精度產生影響,因此在模型導入需要對結構進行簡化。把對強度影響較小的倒角等細節進行簡化,可以減小網格劃分難度。由于其結構復雜,因此采用四面體網格劃分及六面體網格劃分,網格單元尺寸設定為4mm,劃分后共得到52076個節點,27583個單元,如圖4所示。
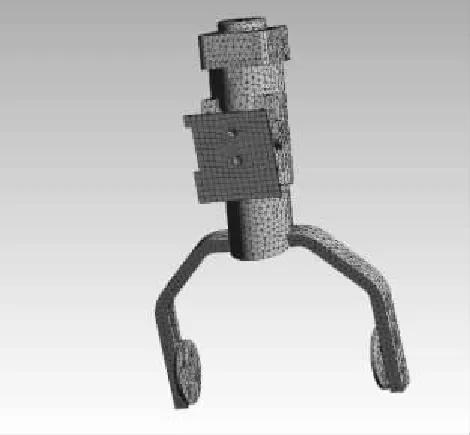
圖4 改進結構網格劃分圖
4.2 模態分析
基于有限元方法的模態分析主要是為了計算離散結構的固有頻率和振型,無限自由度離散結構的動力學方程為

(1)
式中:為離散結構的質量矩陣;為離散結構的阻尼矩陣;為離散結構的剛度矩陣;()為離散結構的激勵函數向量;為離散結構的位移向量。
離散結構的固有頻率是在無阻尼狀態下的自由振動頻率,令式(1)中和()為零,可得離散結構的無阻尼自由振動的動力學方程為

(2)
設離散結構各部位的振動為頻率、相位均相同的簡諧振動,即
=sin()
(3)
將式(3)代入式(2)中可得
-sin()+sin()=0
(4)
由于式(4)在任意時間下均成立,故去掉含時間項得

(5)
式中:為第階的固有頻率;為第階的特征向量,振型形狀因子。
式(5)中,第階的特征向量有非零解的條件是

(6)
將求出的代入式(5)中,可計算出振動特征向量。
模態分析結果是檢驗其結構合理性、安全性的重要指標,是后續分析的基礎。因隨機振動試驗中施加的振動譜頻率范圍為(10~2000)Hz,隨機振動分析時固有頻率要超過振動譜最大頻率的1.5倍即3000Hz。通過仿真可知需要取系統前16階模態。前 16階模態的固有頻率值如表3所示。由于主要是低階固有頻率影響系統結構,因此針對結構前6階振動形態進行分析,并給出了前6階振型云圖,如圖5所示。一二三階振型為云臺架沿Z軸左右擺動。四階振型為云臺架沿XZ面扭轉。五階振型為云臺架沿XZ面扭轉。六階振型為云臺架沿XZ面扭轉,安裝板沿X軸方向上下擺動。
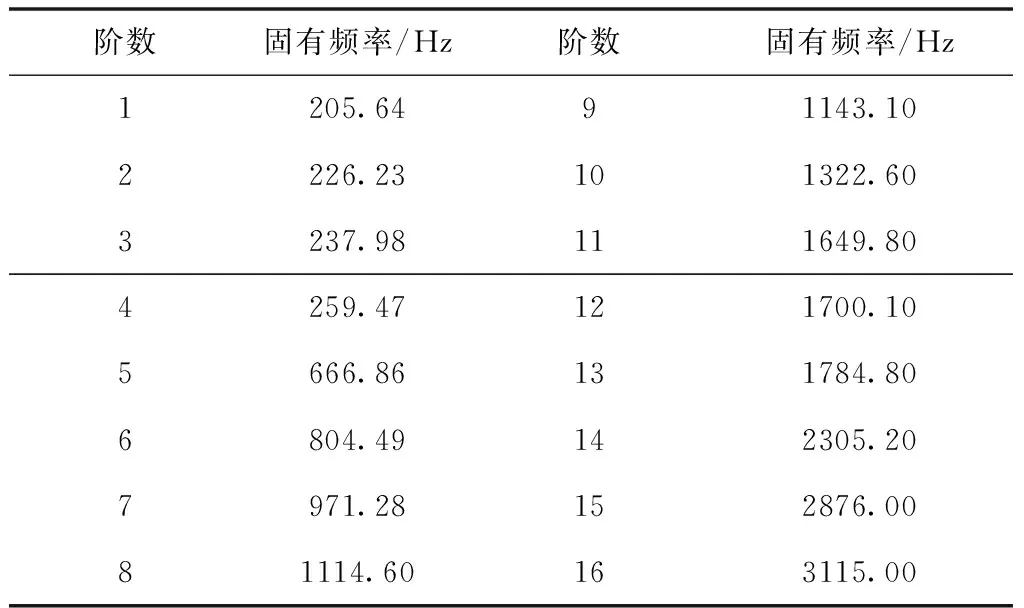
表3 結構的模態參數
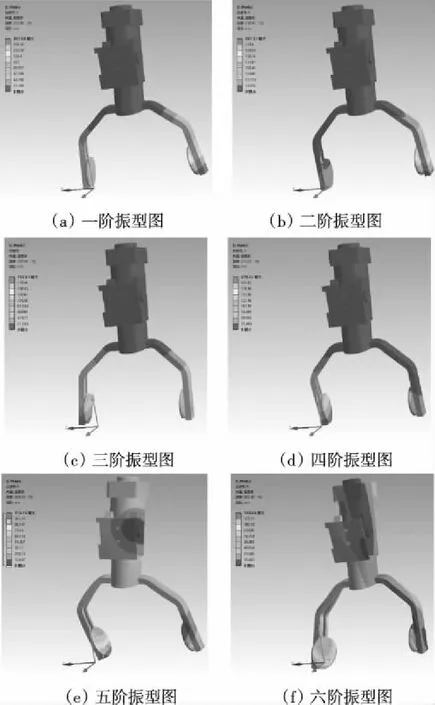
圖5 云臺架前六階振型圖
4.3 云臺結構的隨機振動分析
隨機振動是一種最常見的非確定性振動形式,隨機振動波形有不確定性,不可預知幅值和相位變化,只能通過統計分析方法得到過程的整體統計特征,如均值、方差、功率譜等。隨機振動分析是采用功率譜密度作為輸入激勵以確定響應出現特征值的概率大小的頻域分析方法。在工程計算中,材料的物理性質常被認為是各向同性的,物理過程通常被假定為線性、平穩,各態歷經以及滿足高斯分布類型。
4.3.1 振動輸入邊界條件的確定
直升機平臺振動特性是在低水平帶寬隨機振動背景上疊加很強的主導正弦(Sine-on-Random,SOR)。主導正弦是由旋轉器件(主要是旋翼、尾槳和發動機傳動軸等)產生的。著陸燈所適配直升機混合振動試驗激勵譜圖,如圖6所示。

圖6 振動試驗譜圖
其中,(=1,2,3,4)代表主軸旋翼頻率及其倍頻,其具體數值及對應的正弦振動加速度峰值,如表4所示。直升機平臺的SOR型振動譜線,其中正弦定頻振動部分屬于諧響應范疇,帶寬隨機振動部分屬于隨機振動范疇,但是目前ANSYS不能夠處理這種混合振動模式的模塊,譜線無法同時施加在有限元模型上。對此,需要采用近似簡化的方法,將SOR譜線轉化成優選元模型可接受的邊界條件。
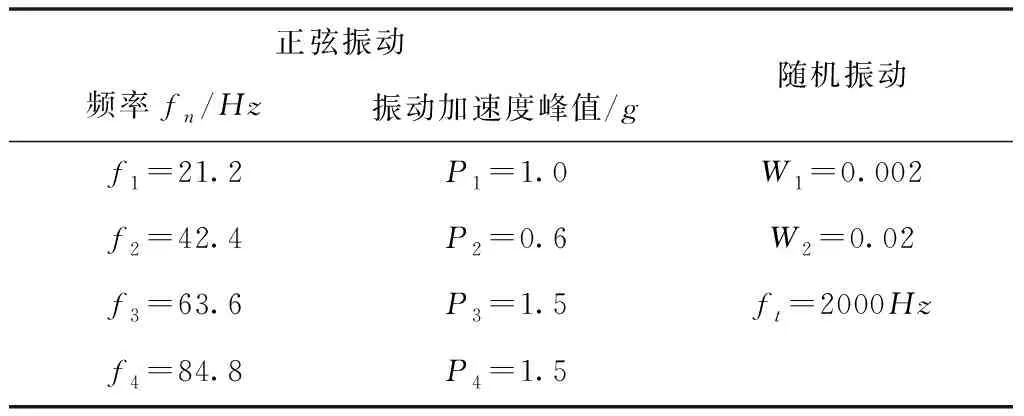
表4 振動試驗條件
在將正弦定頻振動與帶寬隨機振動的能量轉化為一種振動峰值的過程中,需要先確定哪一個是主要分量。確定后將次要分量
轉化為等效的主要分量,進行疊加。圖7所示的譜線中隨機分量是主要分量。根據能量相等這一原則,將型振動譜線中的正弦定頻振動轉化為窄帶隨機振動分量,原振動譜型也由型振動譜線變為譜線(,)。譜線轉化方法,如式(7)、式(8)及式(9)所示。
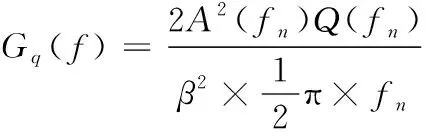
(7)

(8)
(9)
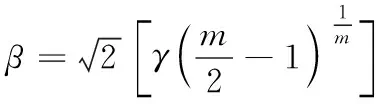
式中:G(f)—等效的隨機振動功率譜密度;A(f)—正弦分量;Q(f)—品質因數;β—等效因子,一般取1.8;f進行等效轉換的振動頻率。
根據上述公式,對給定的 SOR 譜線,需先得知結構品質因數Q(f)。結構品質因數在產品研發階段通常與材料特性和該產品的結構有關。結構品質因數的精確數值需經實驗測定,它的經確度將直接影響譜線的幅值和帶寬。因為著陸燈設計完成后需要滿足國軍標規定的隨機振動試驗,因此采用基于試驗的譜線轉化方法。譜線中正弦定頻信號理論上沒有帶寬,但振動控制器中正弦定頻信號有實際寬度。正弦定頻信號的寬度和數據分析的頻率分辨率帶寬相同,且幅值隨著分析帶寬的變窄而增大。根據式(1),轉換后的譜線,如圖7所示。
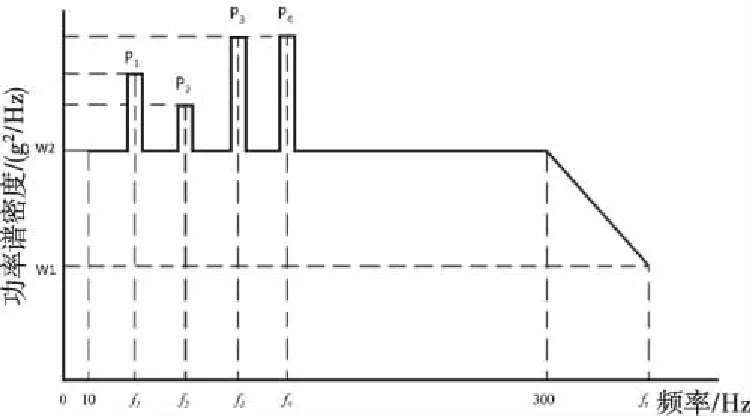
圖7 轉化后的寬帶疊加窄帶隨機振動譜圖
432 隨機振動響應結果及分析
根據國軍標中振動試驗的相關規定,設備應該在三個互相正交軸的每一軸向進行分析。沿結構的、、三個方向分別施加的振動譜線,如圖8所示。仿真計算時選取3區間條件下的應力為分析結果。結果顯示、、三個正交方向的最大等效應力發生在方向上,如表5所示。
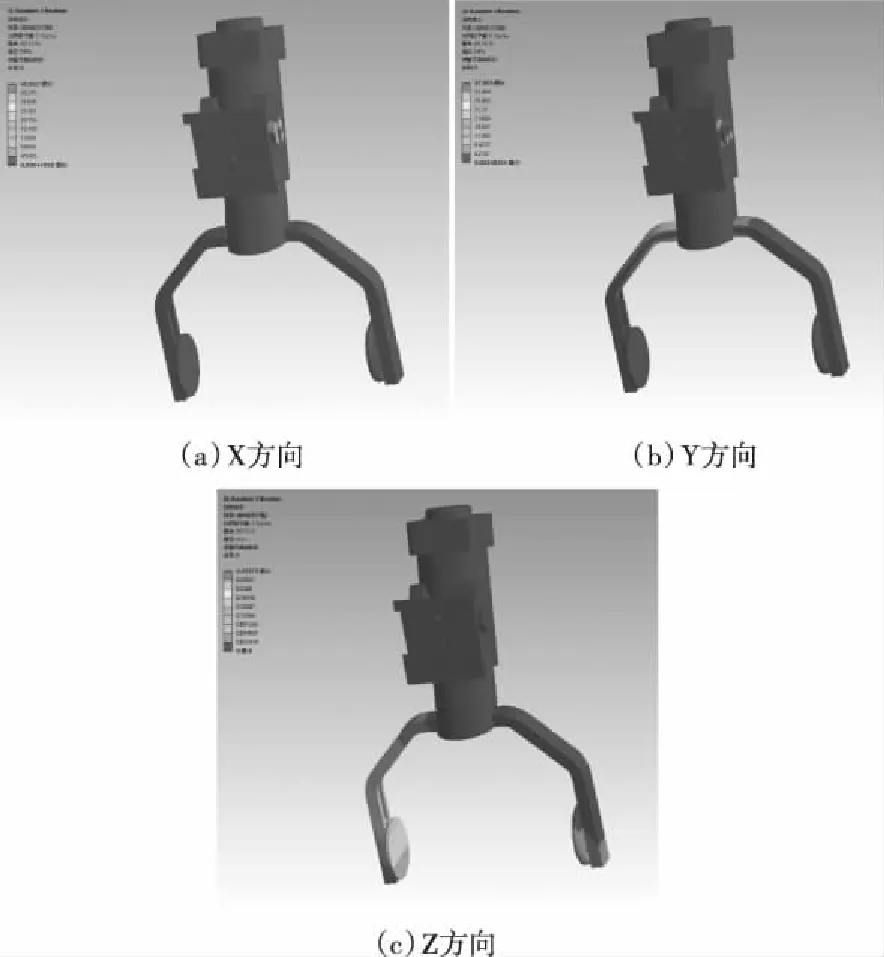
圖8 3σ等效應力云圖
從表5可以看出,該部件在方向上激勵對其結構破壞最大,方向激勵下的3等效應力分布圖,如圖8所示。相應的最大應力為42278,發生在殼體固定端面,遠小于材料12的屈服強度270,結構剩余強度系數為638。在云臺架頂部安裝板旁設置測點,其響應曲線如圖9所示,在20526頻率左右時出現峰值,該頻率下測點最大應力為42278。圖9中各個波動發生區域均在結構模型的各階固有頻率附近。文章所設計的結構動態特性較好,在直升機激勵環境下仍能滿足技術要求。
表5 三個軸向最大 3σ應力響應值
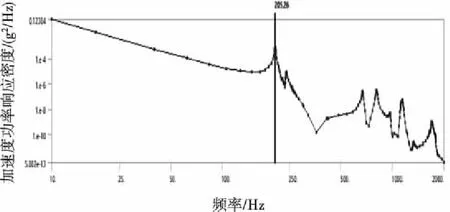
圖9 響應PSD圖
5 結論
文章基于原有著陸燈結構優化設計了一種新型著陸燈結構。通過對優化后結構的模型進行動力學分析,得到如下結論:
1)改進后結構解決了原有結構燈頭松動、限位裝置易老化的問題,改善了搜索功能,并實現了自穩調節功能。
2)基于的固有模態分析和隨機振動仿真分析,發現向振動下結構的響應最大,最大等效應力為47278,結構剩余強度系數638,說明結構在隨機振動環境下具有良好的強度。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
哲學評論(2021年2期)2021-08-22 01:53:34
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
