公路交通荷載作用下場(chǎng)地微振動(dòng)響應(yīng)分析
2022-10-21 08:15:58孫浩誠(chéng)邢云林王經(jīng)磊
噪聲與振動(dòng)控制 2022年5期
孫浩誠(chéng),邢云林,郝 勇,董 捷,王經(jīng)磊
(1.河北建筑工程學(xué)院土木工程學(xué)院,河北張家口 075000;2.中國(guó)電子工程設(shè)計(jì)院有限公司北京市微振動(dòng)環(huán)境控制工程技術(shù)研究中心,北京 100084;3.河北省高校綠色建材與建筑改造應(yīng)用技術(shù)研發(fā)中心,河北張家口 075000)
隨著高科技產(chǎn)業(yè)的興起,電子產(chǎn)業(yè)生產(chǎn)加工過(guò)程趨于精細(xì)化、微小化,對(duì)電子廠房的要求也遠(yuǎn)高于傳統(tǒng)工業(yè)廠房。電子產(chǎn)業(yè)興起的同時(shí),微振動(dòng)對(duì)電子產(chǎn)品生產(chǎn)過(guò)程中的影響也日益增長(zhǎng)。電子廠房周邊的人為振動(dòng)活動(dòng)會(huì)對(duì)電子產(chǎn)品的生產(chǎn)造成影響,其中交通荷載造成的影響是不可忽視的。因此,準(zhǔn)確測(cè)試和評(píng)估交通荷載對(duì)電子廠房的振動(dòng)影響對(duì)電子廠房的設(shè)計(jì)和使用起著至關(guān)重要的作用。
國(guó)內(nèi)場(chǎng)地微振動(dòng)研究主要集中在地鐵、高鐵行駛對(duì)周邊環(huán)境的影響,對(duì)公路交通荷載振動(dòng)響應(yīng)的研究還不全面。
2013年,秦林等[1]實(shí)測(cè)了大中型公交車(chē)引起的地面振動(dòng),分析了公交車(chē)引發(fā)的振動(dòng)隨距離變化的衰減規(guī)律。2013年,葉茂等[2]對(duì)某地區(qū)交通荷載引起的周?chē)ㄖ駝?dòng)進(jìn)行實(shí)測(cè)并分析,總結(jié)了交通荷載引起的振動(dòng)在建筑結(jié)構(gòu)中的傳播規(guī)律。同年樓夢(mèng)麟等[3]對(duì)某隧道及附近地表進(jìn)行了振動(dòng)實(shí)測(cè),發(fā)現(xiàn)地面交通振動(dòng)響應(yīng)豎直向最大,隧道交通振動(dòng)響應(yīng)豎直向最小;高頻部分衰減速度遠(yuǎn)大于低頻部分。2016年,戴劍敏[4]通過(guò)試驗(yàn)研究了不同路面材料、車(chē)輛荷載和減速帶材料對(duì)地面振動(dòng)衰減程度的影響。2017年,宗剛等[5]對(duì)某毗鄰城市主干道空曠場(chǎng)地進(jìn)行振動(dòng)測(cè)試,同時(shí)測(cè)量地鐵和車(chē)輛引起的地面振動(dòng)響應(yīng),研究發(fā)現(xiàn)在中遠(yuǎn)場(chǎng)距離地鐵和車(chē)輛引起的地面振動(dòng)衰減規(guī)律相近,近場(chǎng)距離引起的地面振動(dòng)衰減規(guī)律相反,不可相互預(yù)測(cè)。2019年,陳璠[6]通過(guò)對(duì)某場(chǎng)地振動(dòng)實(shí)測(cè),分析了該場(chǎng)地不同車(chē)重和車(chē)速引發(fā)的振動(dòng)響應(yīng)及衰減規(guī)律。2019年鄒錦華等[7]對(duì)廣州兩條道路進(jìn)行實(shí)測(cè),發(fā)現(xiàn)道路振動(dòng)響應(yīng)與汽車(chē)軸重、行駛速度、道路剛度密切相關(guān)。2020年,徐仁華等[8]對(duì)武漢某高速公路長(zhǎng)江大橋進(jìn)行了實(shí)測(cè),分析了不同車(chē)型、軸重和軸距特征參數(shù)的振動(dòng)響應(yīng)規(guī)律。
本文結(jié)合上海某工業(yè)園區(qū)滿載卡車(chē)以不同行駛狀態(tài)通過(guò)時(shí)引起的場(chǎng)地振動(dòng)響應(yīng)測(cè)試結(jié)果,分析了卡車(chē)以不同編隊(duì)方式、行駛速度、行駛方式通過(guò)時(shí)引起的場(chǎng)地振動(dòng)響應(yīng),為該電子廠房設(shè)計(jì)及微振動(dòng)控制提供依據(jù),且對(duì)類(lèi)似高科技電子廠房微振動(dòng)測(cè)試及微振動(dòng)控制具有一定借鑒意義。
1 試驗(yàn)簡(jiǎn)介
試驗(yàn)場(chǎng)地東側(cè)為上海某一工業(yè)開(kāi)發(fā)區(qū)。為測(cè)試過(guò)車(chē)引起的場(chǎng)地振動(dòng)響應(yīng),用兩輛50 t 滿載卡車(chē)在鴻音路自北向南行駛模擬交通荷載。
根據(jù)《電子工業(yè)防微振工程技術(shù)規(guī)范》(GB51076—2015)[9]規(guī)定,在鴻音路西側(cè)垂直公路中心線處布置六個(gè)測(cè)點(diǎn),測(cè)點(diǎn)連線垂直于公路,分別距道路中心線30 m、60 m、90 m、150 m、180 m、210 m,具體場(chǎng)地測(cè)點(diǎn)布置情況如圖1所示。
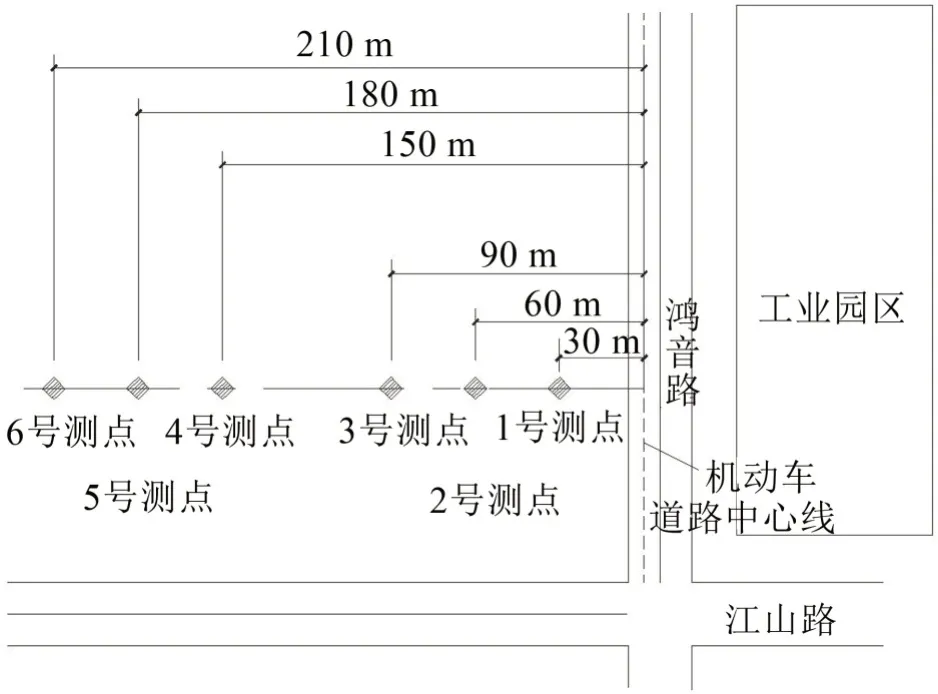
圖1 振動(dòng)測(cè)試現(xiàn)場(chǎng)測(cè)點(diǎn)布置圖
現(xiàn)場(chǎng)測(cè)試采用941B 型高靈敏度磁電式傳感器和ⅠNV3062T0 型數(shù)據(jù)采集儀組成微振動(dòng)測(cè)試系統(tǒng)。每個(gè)測(cè)點(diǎn)布置一套振動(dòng)采集系統(tǒng)。
同時(shí)測(cè)試六個(gè)測(cè)點(diǎn)、三個(gè)方向共計(jì)18組速度時(shí)域響應(yīng)數(shù)據(jù),以Z、X、Y分別表示同一測(cè)點(diǎn)垂直地面方向、水平垂直于路方向、水平平行于路方向。將六個(gè)測(cè)試系統(tǒng)利用GPS 同步校準(zhǔn),以保證測(cè)試數(shù)據(jù)同時(shí)性。試驗(yàn)包括不同行駛車(chē)速(三種)、行駛方式(兩種)、編隊(duì)方式(三種)共18種過(guò)車(chē)工況,每個(gè)工況進(jìn)行了三次試驗(yàn),共進(jìn)行了54 次試驗(yàn),具體試驗(yàn)工況如表1所示。
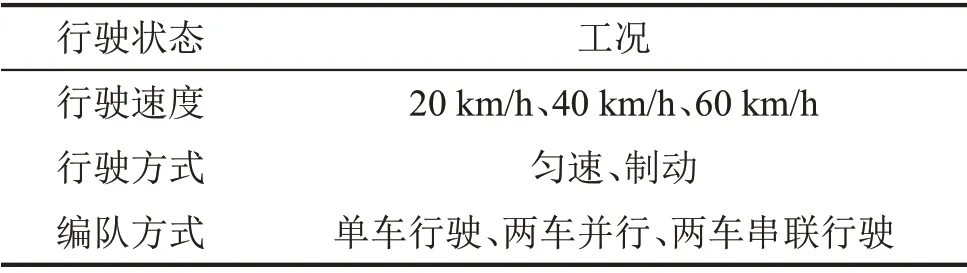
表1 試驗(yàn)工況
根據(jù)園區(qū)提供的場(chǎng)地地勘報(bào)告,測(cè)試場(chǎng)地主要土層分布為,地表為1.51 m厚素填土,向下依次為厚度1.80 m 浜填土、1.39 m 灰黃色黏質(zhì)粉土、12.09 m灰色黏質(zhì)粉土。
2 數(shù)據(jù)分析方法
2.1 時(shí)域統(tǒng)計(jì)分析
本文對(duì)振動(dòng)測(cè)試數(shù)據(jù)的速度峰值和有效值進(jìn)行時(shí)域統(tǒng)計(jì)分析。離散時(shí)間列的速度有效值(Root Mean Square,RMS)計(jì)算方法如公式(1)所示:

式中:K+1為計(jì)算區(qū)間的總樣本數(shù)(本次測(cè)試計(jì)算區(qū)間為40 s),yi表示樣本幅值。
2.2 1/3倍頻程分析
1/3 倍頻程分析法[10-11]是國(guó)際上用于分析電子行業(yè)微振動(dòng)的標(biāo)準(zhǔn)方法。其具體計(jì)算過(guò)程如式(2)、式(3)、式(4)、式(5)所示:
(1)將采集儀中的時(shí)域數(shù)據(jù)進(jìn)行快速傅里葉變換轉(zhuǎn)換至頻域,并計(jì)算功率譜密度函數(shù):

式中:Y(f)為時(shí)域數(shù)據(jù)經(jīng)過(guò)快速傅里葉變換后的振幅;T為時(shí)域內(nèi)選取的時(shí)間。
(2)將頻率劃分為若干頻帶,每個(gè)寬頻帶的上下限頻率分別為fu和fl,中心頻率:

(3)在每一寬頻段中計(jì)算累計(jì)的中心頻率功率譜密度函數(shù)積分值Ey(fc):

(4)計(jì)算中心頻率fc的RMS值:

這樣就可以得到經(jīng)過(guò)處理后的速度1/3 倍頻程曲線。
3 不同方向振動(dòng)響應(yīng)衰減分析
為分析交通荷載作用下場(chǎng)地的振動(dòng)響應(yīng)及衰減規(guī)律,卡車(chē)以60 km/h速度通過(guò)時(shí)各測(cè)點(diǎn)振動(dòng)響應(yīng)衰減曲線如圖2 所示。交通荷載影響下,測(cè)點(diǎn)豎直向振動(dòng)響應(yīng)大于水平向,豎直向振動(dòng)衰減速度較快,水平向振動(dòng)衰減速度較慢。
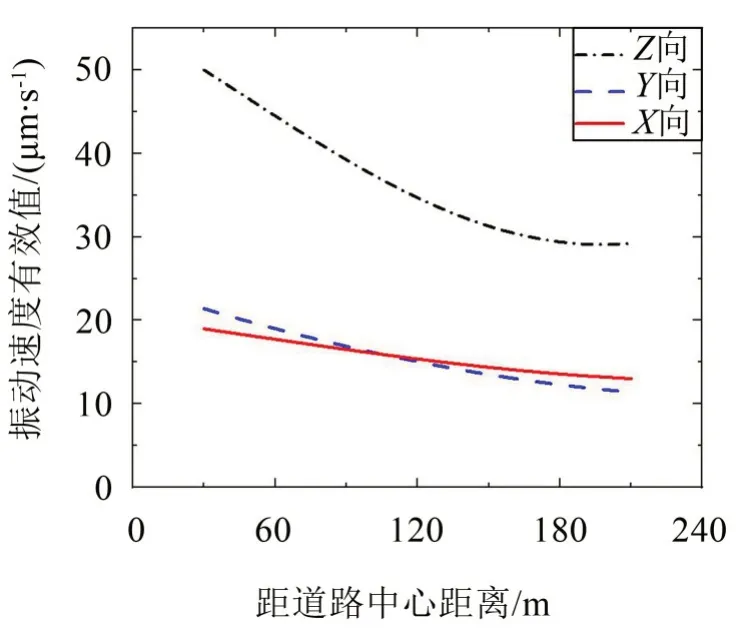
圖2 時(shí)域振動(dòng)響應(yīng)衰減曲線(車(chē)輛行駛速度60 km/h)
交通荷載引起的場(chǎng)地振動(dòng)響應(yīng)隨距離增加整體呈衰減趨勢(shì)。距振源30 m處,豎直向振動(dòng)速度有效值是水平向的2.5~3 倍,說(shuō)明過(guò)車(chē)引起的場(chǎng)地振動(dòng)以豎直向?yàn)橹鳌kS距離增加,三個(gè)方向速度有效值逐漸變小,垂直道路中心線90 m前振動(dòng)響應(yīng)衰減較快,90 m后衰減較慢。這是因?yàn)榻鼒?chǎng)振動(dòng)以體波為主,體波衰減速度快。遠(yuǎn)場(chǎng)振動(dòng)以面波為主,面波衰減速度慢。
該場(chǎng)地過(guò)車(chē)工況引起的水平順路向場(chǎng)地振動(dòng)響應(yīng)略大于水平垂路向。車(chē)輛在行駛過(guò)程中,由于路面的不平整性,車(chē)輪實(shí)際上是在路面上以一定頻率和幅度跳動(dòng)行駛。豎直向振動(dòng)主要由車(chē)體顛簸產(chǎn)生的激勵(lì)引起,水平向振動(dòng)主要由輪胎與路面摩擦、上下坡、加減速產(chǎn)生的水平力引起。
卡車(chē)以60 km/h 速度通過(guò)時(shí)測(cè)點(diǎn)的豎直向頻譜響應(yīng)衰減情況如圖3 所示,振動(dòng)響應(yīng)隨距離增加呈衰減趨勢(shì),振動(dòng)頻率范圍在0~60 Hz,主要成分集中在2 Hz~4 Hz 和10 Hz~15 Hz,說(shuō)明該場(chǎng)地車(chē)輛行駛引起的振動(dòng)以低頻為主。振動(dòng)衰減過(guò)程中,高頻振動(dòng)衰減速度快,低頻振動(dòng)衰減速度慢[12]。這是因?yàn)楦哳l振動(dòng)在傳播過(guò)程中振動(dòng)頻率快,受土體阻尼作用大,衰減速度更快。低頻振動(dòng)衰減速度較高頻振動(dòng)慢,所以傳播距離比高頻振動(dòng)遠(yuǎn)。
圖3 頻域幅值衰減瀑布圖
4 車(chē)輛編隊(duì)方式對(duì)場(chǎng)地振動(dòng)響應(yīng)衰減影響分析
4.1 時(shí)域分析
本節(jié)分析車(chē)輛編隊(duì)方式引起的場(chǎng)地振動(dòng)響應(yīng),考慮的編隊(duì)方式有單車(chē)行駛、兩車(chē)并行行駛、兩車(chē)串聯(lián)行駛。卡車(chē)改變編隊(duì)方式以40 km/h 速度通過(guò)時(shí)各測(cè)點(diǎn)振動(dòng)速度有效值衰減曲線如圖4 所示,各測(cè)點(diǎn)速度峰值衰減曲線如圖5所示。后續(xù)分析若無(wú)說(shuō)明,均為垂直地面方向振動(dòng)響應(yīng)。
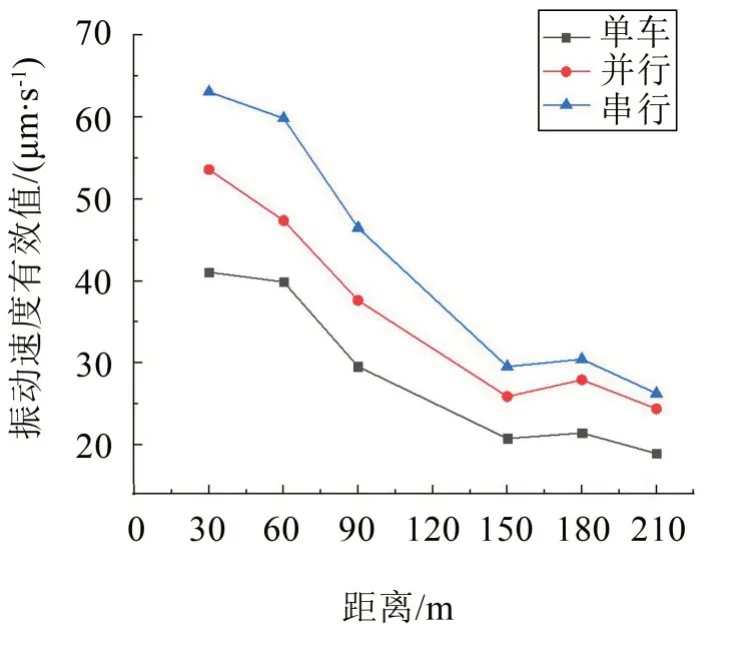
圖4 改變編隊(duì)方式測(cè)點(diǎn)振動(dòng)速度有效值衰減曲線
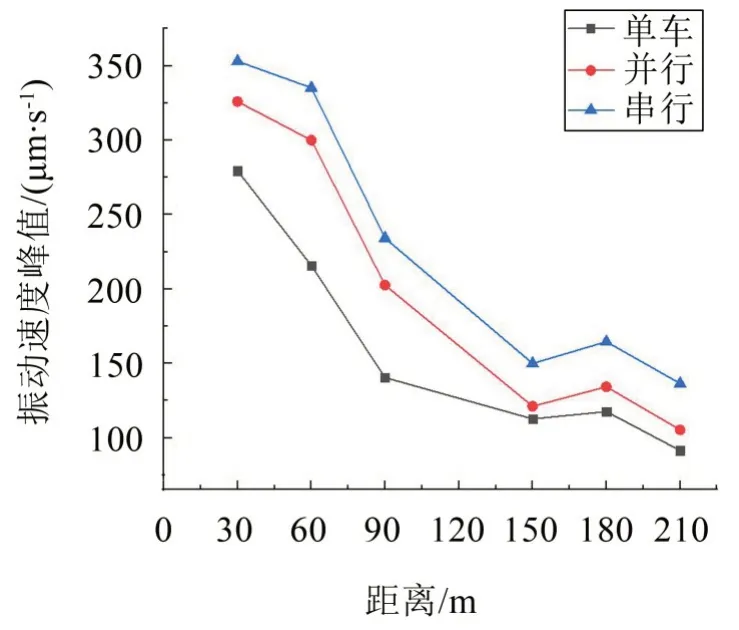
圖5 改變編隊(duì)方式測(cè)點(diǎn)振動(dòng)速度峰值衰減曲線
改變卡車(chē)編隊(duì)方式對(duì)場(chǎng)地的影響十分明顯。30 m 處,串行、并行行駛引起的地面振動(dòng)響應(yīng)是單車(chē)行駛的1.25~1.5倍,這是相同振源疊加的結(jié)果。
卡車(chē)串行行駛引起的場(chǎng)地振動(dòng)響應(yīng)大于并行行駛。后續(xù)試驗(yàn)發(fā)現(xiàn)改變行駛速度、行駛方式,過(guò)車(chē)引起的場(chǎng)地振動(dòng)響應(yīng)不同但衰減曲線與圖5相似。
4.2 1/3倍頻程分析
卡車(chē)改變編隊(duì)方式以40 km/h 速度通過(guò)時(shí)測(cè)點(diǎn)3(距道路中心90 m)1/3 倍頻程諾謨圖如圖6 所示,并將《電子工業(yè)防微振工程技術(shù)規(guī)范》(GB 51076-2015)[9]中精密設(shè)備及儀器容許振動(dòng)值繪制其中進(jìn)行對(duì)比分析。
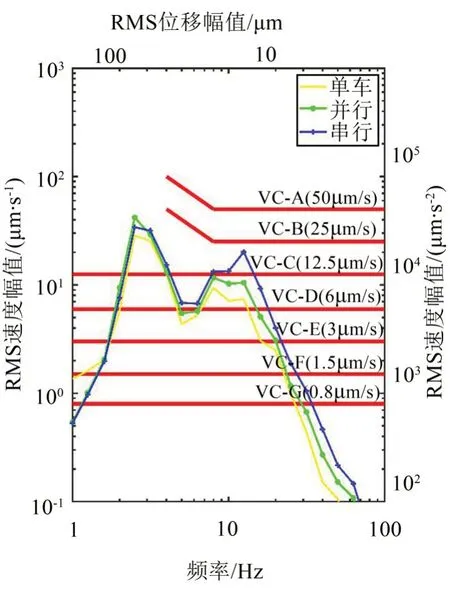
圖6 改變編隊(duì)方式1/3倍頻程頻譜對(duì)比圖
從圖中可以發(fā)現(xiàn),1/3 倍頻程振動(dòng)速度曲線在2.5 Hz處達(dá)到峰值。該過(guò)車(chē)工況引起的各個(gè)頻段的振動(dòng)響應(yīng)幅值為串行>并行>單車(chē)。
1/3 倍頻程譜含有兩個(gè)峰值,第一個(gè)峰值是2.5 Hz,第二個(gè)峰值是12.5 Hz。編隊(duì)方式改變,第一個(gè)峰值對(duì)應(yīng)頻率基本不發(fā)生變化,通過(guò)查找該場(chǎng)地地勘報(bào)告,該場(chǎng)地卓越頻率為2.5 Hz,車(chē)輛行駛與該場(chǎng)地發(fā)生共振。第二個(gè)峰值對(duì)應(yīng)頻率隨編隊(duì)方式改變無(wú)明顯變化,說(shuō)明該峰值的出現(xiàn)與編隊(duì)方式無(wú)關(guān)。
5 車(chē)輛行駛方式對(duì)場(chǎng)地振動(dòng)響應(yīng)衰減影響分析
5.1 時(shí)域分析
本節(jié)分析勻速通過(guò)和剎車(chē)制動(dòng)等行駛方式對(duì)場(chǎng)地振動(dòng)的影響,卡車(chē)改變行駛方式以20 km/h速度通過(guò)時(shí)各測(cè)點(diǎn)振動(dòng)速度有效值衰減情況如圖7 所示,各測(cè)點(diǎn)振動(dòng)速度峰值衰減情況如圖8所示。
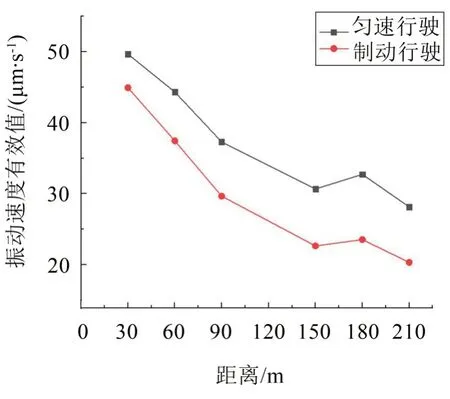
圖7 改變行駛方式測(cè)點(diǎn)振動(dòng)速度有效值對(duì)比
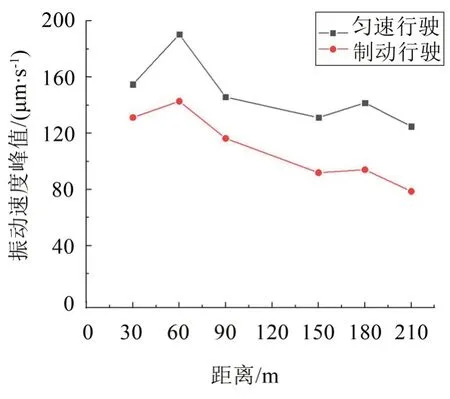
圖8 改變行駛方式測(cè)點(diǎn)振動(dòng)速度峰值對(duì)比
改變編隊(duì)方式會(huì)引起振動(dòng)響應(yīng)的改變。卡車(chē)勻速行駛引起的地面振動(dòng)速度有效值、峰值是制動(dòng)行駛1.1~1.25倍,因?yàn)檎駝?dòng)的傳遞過(guò)程本質(zhì)上是能量傳遞的過(guò)程,剎車(chē)制動(dòng)是輪胎與地面摩擦,速度減小的過(guò)程,部分能量會(huì)轉(zhuǎn)化為內(nèi)能被消耗掉。所以勻速行駛引起的地面振動(dòng)響應(yīng)大于制動(dòng)行駛。
卡車(chē)勻速行駛的時(shí)域波形圖如圖9 所示,卡車(chē)制動(dòng)行駛的時(shí)域波形圖如圖10所示,兩者整體均呈紡錘形,無(wú)明顯差異。
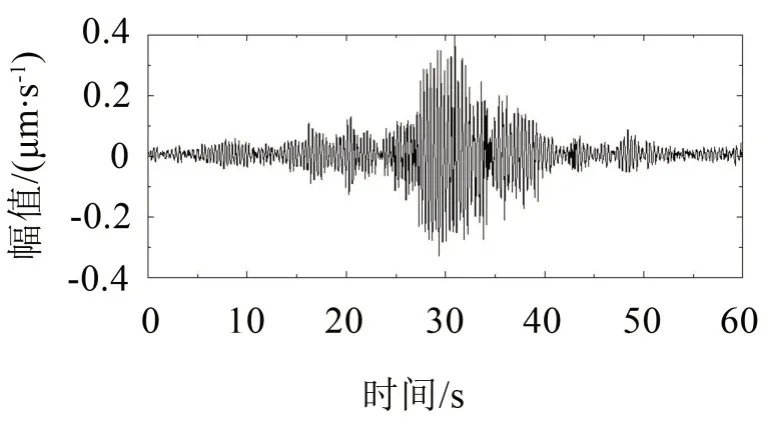
圖9 勻速行駛時(shí)域波形圖
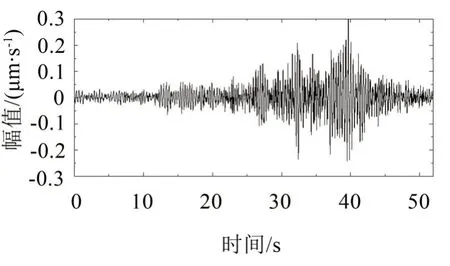
圖10 制動(dòng)行駛時(shí)域波形圖
隨卡車(chē)經(jīng)過(guò),測(cè)點(diǎn)處振動(dòng)響應(yīng)逐漸增大;當(dāng)卡車(chē)經(jīng)過(guò)測(cè)點(diǎn)時(shí),振動(dòng)響應(yīng)達(dá)到峰值;隨卡車(chē)駛離,測(cè)點(diǎn)處振動(dòng)響應(yīng)逐漸減小;當(dāng)卡車(chē)駛離振動(dòng)影響范圍,測(cè)點(diǎn)處振動(dòng)響應(yīng)回歸平常。
5.2 1/3倍頻程分析
為分析不同行駛方式下卡車(chē)引起的場(chǎng)地振動(dòng)響應(yīng),卡車(chē)改變行駛方式以40 km/h速度通過(guò)時(shí)測(cè)點(diǎn)3(距道路中心90 m)1/3 倍頻程諾謨圖如圖11 所示。為分析振動(dòng)速度峰值,將平均方式參數(shù)由“線性平均”調(diào)整為“峰值保持”。
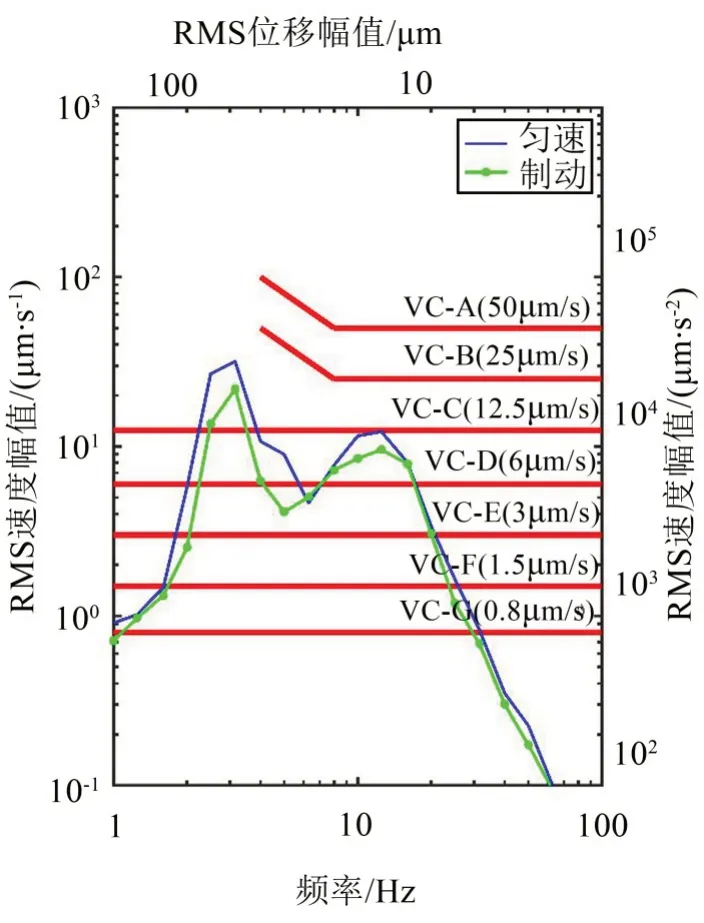
圖11 改變行駛方式1/3倍頻程頻譜對(duì)比圖
從圖11看出,90 m處勻速行駛的幅值大于制動(dòng)行駛,印證了時(shí)域結(jié)論勻速行駛引起的場(chǎng)地振動(dòng)速度峰值大于制動(dòng)行駛。1/3倍頻程譜含有兩個(gè)峰值,第一個(gè)峰值是2.5 Hz,第二個(gè)峰值是12.5 Hz。改變行駛方式,第二個(gè)峰值對(duì)應(yīng)頻率未發(fā)生改變說(shuō)明該峰值的出現(xiàn)與行駛方式無(wú)關(guān)。
6 行駛速度對(duì)場(chǎng)地振動(dòng)響應(yīng)衰減影響分析
6.1 時(shí)域分析
本節(jié)分析行駛速度對(duì)場(chǎng)地振動(dòng)的影響,考慮的行駛速度為20 km/h、40 km/h、60 km/h,為方便觀察測(cè)點(diǎn)的振動(dòng)衰減規(guī)律,對(duì)測(cè)點(diǎn)數(shù)據(jù)進(jìn)行歸一化處理,更有利于綜合對(duì)比評(píng)價(jià)。歸一化處理計(jì)算方法如公式(6)所示:

式中:vi—第i個(gè)測(cè)點(diǎn)的振動(dòng)速度峰值(有效值);
v1—第1個(gè)測(cè)點(diǎn)的振動(dòng)速度峰值(有效值)。
卡車(chē)改變行駛速度通過(guò)時(shí)各測(cè)點(diǎn)振動(dòng)速度有效值衰減曲線如圖12所示,有效值歸一化處理后衰減曲線如圖13所示。
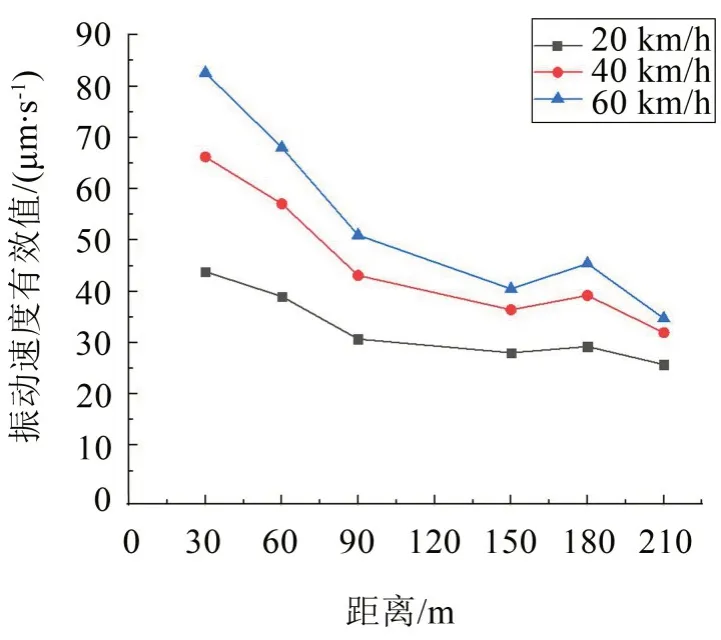
圖12 改變行駛速度測(cè)點(diǎn)振動(dòng)速度有效值
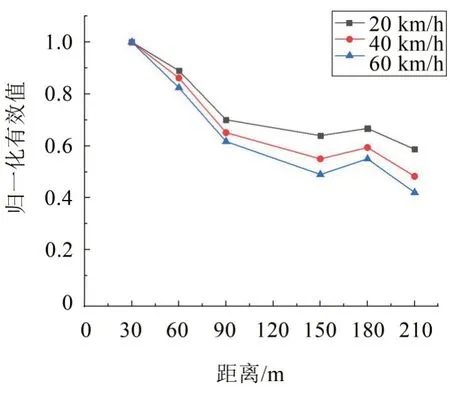
圖13 改變行駛速度測(cè)點(diǎn)振動(dòng)速度歸一化有效值
測(cè)點(diǎn)速度峰值衰減曲線如圖14所示,峰值歸一化處理后衰減曲線如圖15所示。
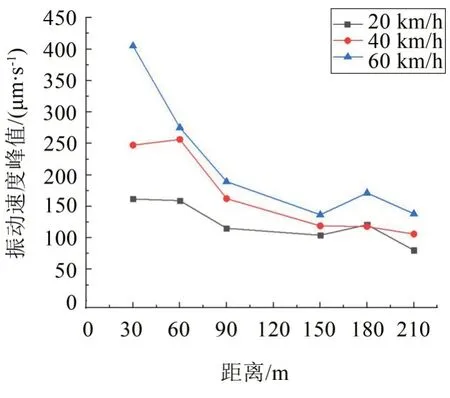
圖14 改變行駛速度測(cè)點(diǎn)振動(dòng)速度峰值
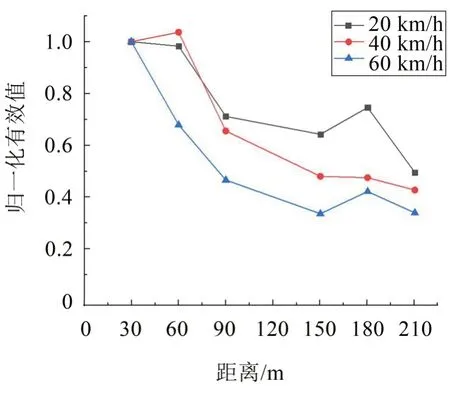
圖15 改變行駛速度測(cè)點(diǎn)振動(dòng)速度歸一化峰值
改變卡車(chē)行駛速度會(huì)引起場(chǎng)地振動(dòng)響應(yīng)變化。卡車(chē)行駛速度越大,引起的場(chǎng)地振動(dòng)響應(yīng)越大。原因是卡車(chē)行駛速度越大振源能量越高,其他條件相同情況下響應(yīng)必然越大。
從圖中看出不同車(chē)速振動(dòng)響應(yīng)衰減速度不同。車(chē)速越快,衰減速度越快,經(jīng)頻譜分析發(fā)現(xiàn)卡車(chē)行駛速度越快,高頻信號(hào)(40 Hz 以上)成分越多,能量損耗速度越快,振動(dòng)衰減更快。
6.2 1/3倍頻程分析
為分析不同行駛速度下卡車(chē)引起的場(chǎng)地振動(dòng)響應(yīng),卡車(chē)改變行駛速度勻速行駛通過(guò)時(shí)測(cè)點(diǎn)3(距道路中心90 m)1/3倍頻程諾謨圖如圖16所示。
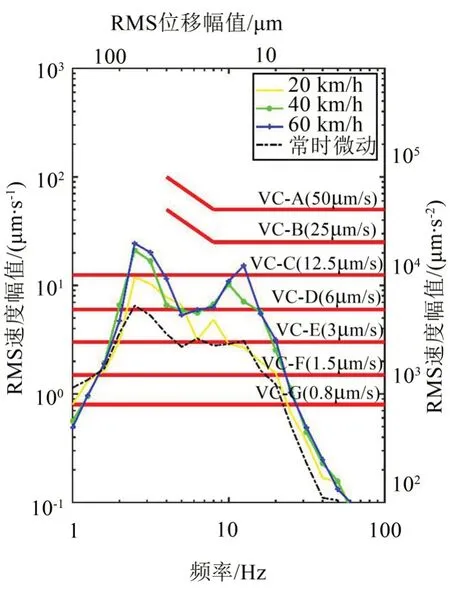
圖16 改變行駛速度1/3倍頻程頻譜對(duì)比圖
圖中可以看出,卡車(chē)行駛速度增大振動(dòng)幅值隨之增大,印證時(shí)域結(jié)論卡車(chē)行駛速度越大,引起的場(chǎng)地振動(dòng)響應(yīng)越大。
為分析常時(shí)微動(dòng)對(duì)場(chǎng)地振動(dòng)的影響,在遠(yuǎn)離振動(dòng)干擾處設(shè)置一套振動(dòng)測(cè)試系統(tǒng)采集場(chǎng)地常時(shí)微動(dòng)信號(hào)。常時(shí)微動(dòng)時(shí)域波形圖如圖17所示,與行駛狀態(tài)下的時(shí)域波形圖不同,常時(shí)微動(dòng)信號(hào)整體波形較為平穩(wěn)。
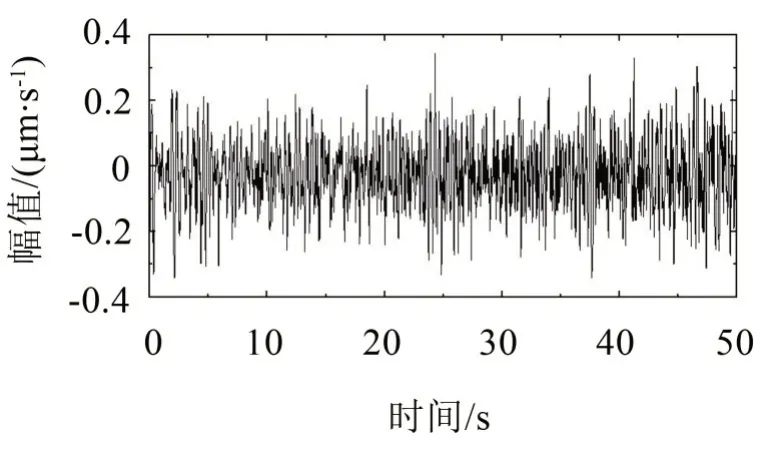
圖17 常時(shí)微動(dòng)時(shí)域波形圖
常時(shí)微動(dòng)工況下均僅含有2 Hz~4 Hz 一個(gè)頻段,而20 km/h、40 km/h、60 km/h卡車(chē)經(jīng)過(guò)工況下則有兩個(gè)峰值頻段。改變行駛速度,第二個(gè)峰值對(duì)應(yīng)頻率隨速度變化呈正相關(guān),該頻段應(yīng)是車(chē)輛輪胎與大地摩擦引起的振動(dòng)。
7 結(jié)語(yǔ)
本文結(jié)合上海某工業(yè)園區(qū)滿載卡車(chē)以不同行駛狀態(tài)通過(guò)時(shí)引起的場(chǎng)地振動(dòng)響應(yīng)測(cè)試結(jié)果,分析了卡車(chē)以不同行駛狀態(tài)通過(guò)時(shí)引起的場(chǎng)地振動(dòng)響應(yīng),得出如下結(jié)論:
(1)該場(chǎng)地道路交通荷載引起的土體振動(dòng)以豎直向?yàn)橹鳎怪钡缆分行木€30 m后振動(dòng)響應(yīng)衰減幅度逐漸減小。
(2)改變卡車(chē)編隊(duì)方式引起的場(chǎng)地振動(dòng)響應(yīng)自大到小依次為串行、并行、單車(chē)行駛。
(3)卡車(chē)行駛速度越快,引起的場(chǎng)地振動(dòng)響應(yīng)越大,衰減越快。
(4)改變卡車(chē)行駛方式,勻速行駛引起的場(chǎng)地振動(dòng)響應(yīng)大于制動(dòng)行駛。
(5)測(cè)點(diǎn)振動(dòng)響應(yīng)1/3倍頻程譜含有兩個(gè)峰值,一個(gè)峰值為2.5 Hz,另一個(gè)峰值為7 Hz~15 Hz。第一個(gè)峰值是由車(chē)輛行駛場(chǎng)地共振引起,第二個(gè)峰值是由車(chē)輛輪胎與大地摩擦引起。
(6)精密儀器電子廠房附近公路有汽車(chē)通過(guò)時(shí),建議單車(chē)-勻速行駛。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
瘋狂英語(yǔ)·新讀寫(xiě)(2020年3期)2020-06-06 09:05:56
電子制作(2018年18期)2018-11-14 01:48:24
中國(guó)公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
計(jì)算物理(2014年2期)2014-03-11 17:01:44
