多元監測系統在盾構隧道下穿既有運營地鐵中的應用
2022-10-19 08:14:16孔繁帆,石巖,智超
價值工程 2022年28期
0 引言
隨著各地大力發展區域性軌道交通建設,城市運營地鐵線網不斷密集,新建線路穿越既有線路工程項目也隨之增多。在地鐵隧道建設施工中,盾構法施工以其特有優勢被廣泛應用,盾構穿越工程施工期間,既有運營地鐵結構的安全穩定尤為重要,而傳統的監測方式已無法滿足運營期實時監測,本文以新建盾構隧道下穿既有運營地鐵工程為例,研究多元智能監測系統在盾構下穿高頻變形監測中的應用。
1 工程概述
1.1 項目概況
新建5號線誠信大道站~清水亭站區間隧道下穿既有3號線誠信大道站~九龍湖站區間隧道,5號線下穿隧道及既有3號線隧道為盾構隧道,隧道下穿位置距離既有3號線誠信大道站約40m,距離新建的5號線誠信大道站約48m。下穿位置對應3號線區間隧道影響范圍上、下行線各22m。新建5號線區間隧道底埋深為24.1m,既有3號線隧道埋深為15.9m,5號線區間隧道與3號線區間隧道豎向最小凈距離為1.92m。(圖1)
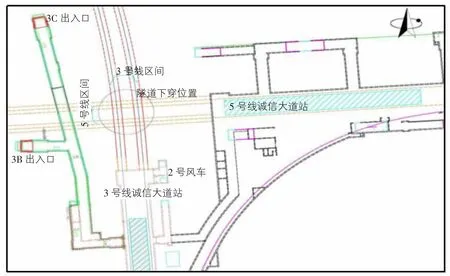
圖1 盾構隧道下穿位置關系圖
1.2 地質條件
1.2.1 工程地質特征
項目位于雙龍大道與誠信大道交界處,地貌單元屬古秦淮河沖積平原,地形較平坦,地面吳淞高程在7.04~9.47m之間。
新建5號線車站外掛二層商業及風道底板坐落于②-2b4淤泥質粉質黏土層,三層車站底板坐落于②-3b2-3粉質粘土及③-2b2-3粉質粘土層中,臨時格構柱樁基礎及地下連續墻底部坐落于K2c-3層強-中風化泥質粉砂巖層中。
1.2.2 水文特征
本工點場地地下水主要為孔隙潛水,局部分布有弱承壓水,其中孔隙潛水主要賦存于①-1雜填土、①-2素填土及②層新近沉積土中。①-1雜填土,結構松散,①-2素填土,松軟,由軟-可塑狀粉質粘土組成,夾碎塊,厚度不均,富水性一般,透水性一般。②層新近沉積土,均為粘性土(局部夾粉土),厚度較大,富水性差、透水性差。
2 監測概況
2.1 監測方法
為確保新建盾構隧道盾構下穿期間既有地鐵結構的運營安全,對其進行全方位實時監測。通過采用多元智能監測系統進行自動化監測,掌握盾構下穿施工過程中對既有地鐵工程結構引起的變化,為建設方及地鐵相關方提供及時、可靠的數據成果和變形信息,評定施工對既有地鐵結構狀態的影響,及時判斷既有地鐵工程的結構安全。
2.2 監測網布設
2.2.1 監測系統總體設計
本項目采用多元智能監測系統實現數據采集獲取、通訊傳輸、處理、分析、展示等環節,并最終進行風險評估和提供最優治理方案。系統通過虛擬多串口擴展模塊、通信網絡、數據采集控制模塊和數據采集系統依次通信連接,采用多線程并行通信方式實現虛擬多串口進行多線程并行通信,同時支持多臺不同型號的傳感器進行遠程傳輸,并自動化監測數據處理系統實現原始觀測數據的處理及平差計算,最終通過云平臺對監測報表圖形化展示,實現監測成果的即時查看、實時分析、量化評價等功能。(圖2)
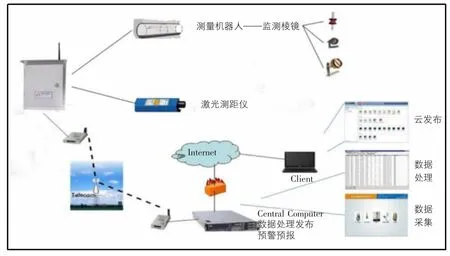
圖2 多元監測系統組成結構示意圖
①智能全站儀采集設備。根據監測范圍、地鐵線路走向、本項目對應段隧道既有變形情況,結合項目平縱斷面關系、隧道現場實際情況與監測項目、施工期間對地鐵結構可能存在影響,共使用2臺Leica TM30智能型全站儀(上、下行線各1臺)實施自動化監測,完成各監測點位三維坐標數據的采集,從而反映隧道結構的垂直位移、水平位移等變形情況。監測系統采用自主研發的多元智能監測系統,該系統性能可靠且運行狀態穩定。在監測工作實施前對影響范圍內的隧道結構進行全面普查,結合普查狀態與施工過程中地鐵結構變形速率進行動態監測。
②自動化激光測距儀采集設備。由于本工程項目段隧道環境條件較差,隧道為直線段且點位布設較為密集,為避免小角度測量帶來的觀測誤差,本次隧道直徑收斂監測采用激光測距儀自動化監測系統對既有隧道直徑收斂進行監測,監測精度優于±1.0mm,能夠很好地滿足地鐵隧道收斂監測要求。
收斂監測系統采用HD-2NJ110型激光測距儀傳感器,該測距儀精度高、穩定性好,通過發射激光束至目標物體,利用反射光束精確計算距離,因此無需增設反射靶的情況下,也能實現遠距離檢測,而且對目標物體的尺寸面積要求比超聲波類型要求小,使得對遠距離的小尺寸物體位置檢測成為可能。HD-2NJ110型測距儀測量響應速度快,具有RS232/RS422接口能進行自動化連續監測,通過數據采集通訊模塊把成果數據遠程傳輸到終端,并通過服務器遠程展示。
2.2.2 基準點及工作基點布設
基準點的穩定性是影響監測成果精度的關鍵性因素,為保證基準點穩定可靠,基準點分別布設在項目變形區外60~80m誠信大道站到九龍湖站區間隧道內穩定位置處,上下行線各布設2個基準點組,每個基準點組含8個L型小棱鏡基準點。
為提高監測成果精度,現場將全站儀工作基點的視線范圍控制在150m內,在工作基點上安裝具有避震功能的強制對中支架,用于安置全站儀進行數據采集。
2.2.3 監測點布設
盾構下穿影響范圍為工程正上方對應段及兩側各外擴15m,全長約52m,原則上每隔3m布設一個監測斷面,每個監測斷面包括道床垂直位移、管片垂直位移、道床水平位移、水平收斂。上、下行線各布設18個監測點,共布設36個監測斷面。(圖3)
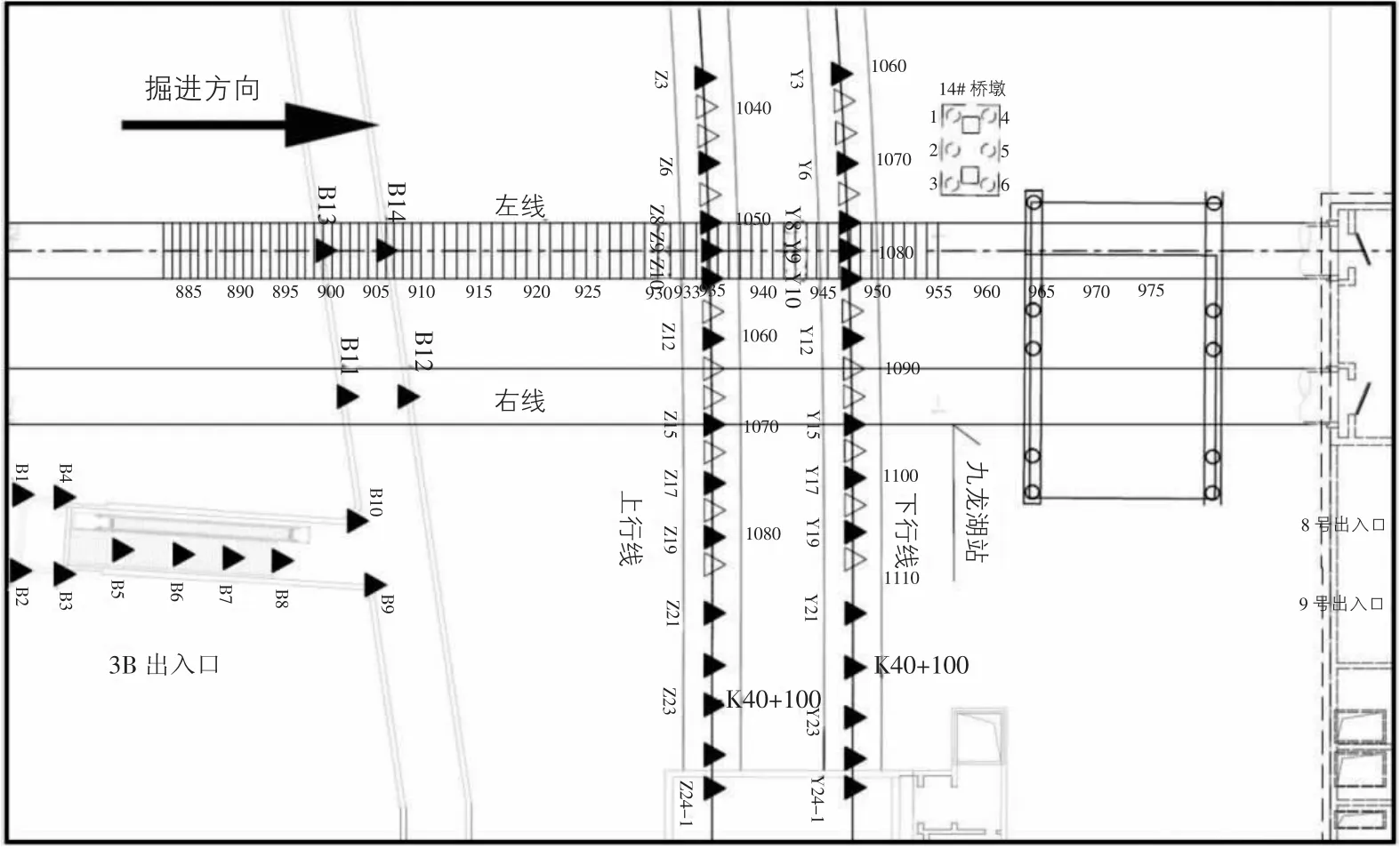
圖3 5號線盾構下穿施工階段特征點位分布圖
2.3 監測頻率
盾構穿越過程中,5號線左線盾構先穿越3號線上行線,后穿越3號線下行線。本次施工于1月1日進入3號線上行線影響區(開挖面至監測斷面距離8D范圍),頻率1天/次,1月2日距離27環,頻率4h/次,1月3日距離18環,頻率2h/次,1月5日盾構刀盤推進到3號線上行線隧道平面投影線的下方,頻率為30min/次,1月8日盾尾脫離3號線下行線隧道投影線,頻率為1h/次,正下方穿越歷時4天;同時,隨著盾構機遠離既有3號線,監測頻率也逐步放緩。于1月16日盾構機完成接收工作,脫離3號線下行線投影邊線48m,頻率為12h/次。
3 數據分析
選取盾構下穿期間既有線特征斷面道床及管片垂直位移變化情況生成歷時曲線圖如圖4。
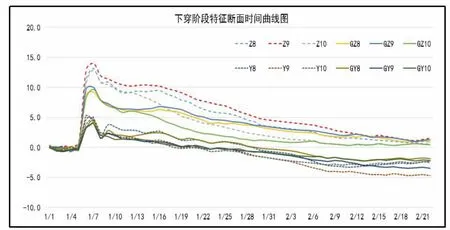
圖4 5號線盾構下穿施工階段特征斷面道床及管片階段變化量曲線圖
由于新建盾構隧道與既有線極為接近,且地質狀態較差,盾構下穿期間既有線變形明顯,主要表現為前期抬升、后期沉降。具體情況為,盾構穿過既有3號線上行線正下方后,盾構施工開始對既有線隧道產生影響,道床垂直位移與管片垂直位移出現明顯抬升,其中峰值時期盾構切口穿過3號線上行線正下方后,上行線特征斷面Z8、Z9、Z10道床上抬量分別為10.7mm、12.0mm、9.8mm,管片上抬量分別為8.3 mm、9.3 mm、7.5mm,且當日3號線隧道上行線瞬時(30min)隆起曾最高達1.8mm。同時,Z8、Z9、Z10斷面水平收斂也產生明顯擴張,當日變化量分別為外擴6.9mm、6.5mm、4.9mm。在控制盾構機掘進速度及注漿參數后抬升速率逐漸趨緩,隨后上、下行線道床垂直位移上抬量達到最大值14.6mm(Z9)、5.4mm(Y9);盾構機盾尾通過3號線下行線正下方后,道床、管片均呈現下沉趨勢;在脫出盾尾5環后既有線線沉降速度較快,上行線特征斷面當日平均沉降-2.2mm;隨著盾構接收完成,隧道結構處于緩慢下沉狀態,平均沉降-0.5mm/d;后期,針對3號線下行線進行多次疊交注漿施工后,既有線出現輕微回隆,隨后繼續緩慢下沉。
盾構機接收后,為保障穿越后3號線安全運營,采取了一系列補償注漿措施,在5號線隧道上部注漿孔對應3號線隧道底部土體進行拱頂補強注漿,從而形成長期、均勻、穩定的加固體,依靠土體應力補償的原理,使既有線趨向于穩定;近半月的沉降速率有所緩解,上行線最大-0.115mm/d,下行線最大-0.107mm/d。
4 結語
①結合地鐵5號線盾構下穿既有3號線工程實例,闡述多元智能監測系統的原理、方法及現場實施,并根據下穿期間實時監測數據分析盾構下穿工程對既有線的具體影響。盾構下穿過程中,既有線正投影段出現前期隆起、后期沉降的變形趨勢,在控制盾構掘進速度和注漿參數后,隆起情況有所減弱,在盾構下穿完成后,既有線處于持續緩慢下沉狀態,說明既有線受盾構推進擾動較大,土體變形受影響時間也較長。盾構進入接收井后至今,既有線隧道結構處于緩慢下沉趨勢,在新建隧道內部針對既有線下方進行多次疊交注漿施工后,既有線出現輕微回隆,沉降趨勢逐漸減緩。根據連續跟蹤監測數據顯示,盾構施工過程中,注漿施工起到了減緩和穩定既有線結構變形的作用。
②采用多元智能監測系統進行全時段監測,通過對激光測距儀、全站儀智能化整合,用于盾構下穿既有地鐵線路期間高頻觀測,頻率最高達30min/次,即時反映地鐵結構變形情況,為地鐵建設、運營、施工等多方提供準確高效的決策依據,確保下穿工程順利完工,也為類似地質盾構下穿既有地鐵工程項目的開展積累相關經驗。
猜你喜歡
建材發展導向(2021年9期)2021-07-16 07:11:36
中華詩詞(2020年1期)2020-09-21 09:24:52
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
西安建筑科技大學學報(自然科學版)(2014年2期)2014-11-12 13:04:54
