電壓波動對異步電動機轉(zhuǎn)子斷條故障檢測的影響
2022-10-17 14:21:16許伯強陳思遠(yuǎn)謝子峰陳經(jīng)偉
電機與控制學(xué)報 2022年9期
許伯強, 陳思遠(yuǎn), 謝子峰, 陳經(jīng)偉
(1.華北電力大學(xué) 電氣與電子工程學(xué)院,河北 保定 071003; 2.國網(wǎng)衡水供電分公司,河北 衡水 053000)
0 引 言
轉(zhuǎn)子斷條故障是電動機的常見故障之一,故障發(fā)生率高達(dá)10%[1],因此必須提出可靠的方法進(jìn)行有效監(jiān)測。
電機發(fā)生轉(zhuǎn)子斷條故障時,定子電流基頻分量兩側(cè)會出現(xiàn)頻率為(1±2s)f1的邊頻分量[1-3](s為轉(zhuǎn)差率,f1為供電頻率,定子電流主要分量即為f1分量)。因此這一頻率的電流分量可以作為檢測轉(zhuǎn)子斷條故障的特征分量。由于電流信號易于采集,所以最早的轉(zhuǎn)子斷條故障檢測方法是傳統(tǒng)的傅里葉變換(FFT)。通過對電流進(jìn)行FFT頻譜分析,檢測頻譜圖上是否出現(xiàn)(1±2s)f1的特征分量來確定電機是否發(fā)生故障。但電機在額定功率下運行時轉(zhuǎn)差率s非常小,在輕載甚至空載時更小。而轉(zhuǎn)子斷條的特征頻率是(1±2s)f1,這與定子電流主頻率f1很接近(相差約0.5~5 Hz),且特征頻率的幅值同樣很小(特征頻率幅值與定子電流主頻比約為0.02~0.05)[4],因而特征頻率(1±2s)f1很容易被定子電流主頻f1所淹沒,特征頻率分量的檢測會變得非常困難。
文獻(xiàn)[5]提出了關(guān)于這一問題的解決思路,使用自適應(yīng)濾波技術(shù)抵消主頻f1分量,這樣邊頻分量(1±2s)f1就成為主頻分量,從而抑制f1分量對邊頻分量檢測的影響,實驗證明此方法切實可行。文獻(xiàn)[6]通過變分模態(tài)分解的方法獲取三相電流的基頻信息,之后利用Park變換的方法檢測轉(zhuǎn)子是否發(fā)生斷條故障。文獻(xiàn)[7]將定子電流信號頻譜特征與振動信號頻譜特征融合作為斷條判定依據(jù),首先對信號做小波包分解,與正常信號能量分布對比,找出異常能量頻段并重構(gòu),對該段信號進(jìn)行快速傅里葉變換識別故障特征頻率分量。文獻(xiàn)[8]首先將瞬時功率的概念用于轉(zhuǎn)子斷條故障檢測,通過故障前后瞬時功率頻譜成分的差別來檢測電機是否發(fā)生故障。文獻(xiàn)[9]指出轉(zhuǎn)子斷條故障主要與無功功率相關(guān)而與有功功率無關(guān),并進(jìn)行了公式推導(dǎo)與仿真實驗證明。
近年來,隨著人工智能的興起,諸多大數(shù)據(jù)算法被應(yīng)用于轉(zhuǎn)子斷條故障檢測,且取得顯著的成績。文獻(xiàn)[10]將遷移學(xué)習(xí)(transfer learning,TL)和深度卷積神經(jīng)網(wǎng)絡(luò)(deep convolutional neural network,dCNN)的思想結(jié)合起來,提出了一種新的故障檢測框架—基于遷移學(xué)習(xí)的深度神經(jīng)網(wǎng)絡(luò)(transfer learning-deep convolutional neural network,TL-dCNN),利用霍爾傳感器采集電流信號,并轉(zhuǎn)換為圖像輸入到TL-dCNN模型。這種方法具有自主學(xué)習(xí)、決策和最少人為干預(yù)的優(yōu)點。
上述方法均取得顯著的效果,但局限在于并未考慮電壓波動的影響。未將電壓波動納入考慮的一個重要原因是難以準(zhǔn)確計算或測量電壓波動。因此,本文提出波動系數(shù)的概念以解決這一問題。電壓波動會影響瞬時無功功率頻譜中的頻率成分,導(dǎo)致誤判,使該類檢測方法失效。為此,推導(dǎo)異步電動機電壓波動系數(shù)的閾值,并以此衡量電壓波動是否會影響轉(zhuǎn)子斷條故障的檢測。將該判定用于基于瞬時無功功率信號分析的轉(zhuǎn)子斷條故障檢測之前,使其更加可靠。通過仿真與實驗驗證,該方法切實可行。
1 無功功率頻譜分析
1.1 正常的籠型異步電動機的瞬時無功功率表達(dá)式
不失一般性,假設(shè)正常情況下三相籠型異步電動機的定子電流和定子外加電壓的表達(dá)式為:
(1)
(2)
式中:I0為相電流的幅值;U0為相電壓的幅值;φ為電流滯后電壓的相位角;t為時間;k取1、2、3分別表示a、b、c三相,下同。
定義瞬時無功功率表達(dá)式[11]為
(3)

將式(1)、式(2)代入式(3)中,可得異步電動機正常時瞬時無功功率的表達(dá)式為
(4)
由式(4)可知,異步電動機正常運行時,外加電壓與定子電流相互作用,瞬時無功功率中只有一個恒定分量。
1.2 轉(zhuǎn)子斷條時籠型異步電動機的瞬時無功功率表達(dá)式
當(dāng)異步電動機發(fā)生轉(zhuǎn)子斷條故障時,定子各相電流中會出現(xiàn)特征頻率分量(1±2s)f1,即
(5)
式中:Ib、Ip為兩特征頻率分量的幅值;φb、φp為兩特征頻率分量電流滯后電壓基頻分量的相位角。
將式(2)、式(5)代入式(3)中,轉(zhuǎn)子發(fā)生斷條故障時瞬時無功功率的表達(dá)式為:
(6)
文獻(xiàn)[12]指出φb+φp≈π,式(6)可做進(jìn)一步化簡為
(7)
由式(7)可知,相較于正常情況,發(fā)生轉(zhuǎn)子斷條故障時,瞬時無功功率多出頻率為2sf1的特征分量,該分量即可作為轉(zhuǎn)子斷條故障的特征。
1.3 電壓波動時籠型異步電動機的瞬時無功功率表達(dá)式
定義電壓波動的數(shù)學(xué)模型[13]為
uk=U0(1+mcos2πfFt)×
(8)
式中:mU0cos2πfFt為調(diào)幅波;m為調(diào)幅波幅值與電壓基波幅值之比;fF為調(diào)幅波頻率。
由式(8)可知,波動電壓中出現(xiàn)f1-fF和f1+fF兩種頻率分量。顯然,對應(yīng)電流中也會出現(xiàn)此兩種頻率分量,因而電流可表示為
(9)
式中:n1、n2分別為f1-fF和f1+fF兩種頻率分量幅值與電流基波幅值之比;φ1、φ2分別為f1-fF和f1+fF兩種頻率分量電流滯后電壓基頻分量的相位角。
將式(8)、式(9)代入式(3)中,此時的瞬時無功功率為
(10)

(11)
由式(11)可得,若電壓波動但電機正常,相較于電壓平穩(wěn)且電機正常運行情況,瞬時無功功率中多出頻率為fF的分量。
轉(zhuǎn)子斷條時瞬時無功功率特征分量的頻率介于0.5~5 Hz,比較式(7)與式(11)可知,若調(diào)幅波頻率亦處于該范圍,則有可能出現(xiàn)誤判,導(dǎo)致基于瞬時無功功率信號分析的轉(zhuǎn)子斷條故障檢測失效。
2 SVD與電壓波動系數(shù)
1873年,Beltrami對實正方矩陣最先提出了奇異值分解。
若存在一個m×n維實矩陣A,則有m維正交方陣U和n維正交方陣V使得
A=UΣVH。
(12)
不妨設(shè)采樣信號為波動的電壓信號為
x[n]=s[n]+e[n]。
(13)
式中:n取1,2,3,…,N;s[n]為電壓主頻信號;e[n]為電壓的擾動信號。
依照式(14)構(gòu)造Hankel矩陣為
(14)
式中:M+L=N+1;A矩陣即為電壓的信號矩陣。
利用SVD技術(shù)將電壓主頻信號與波動信號分開。電壓中的主頻信號和波動信號集中體現(xiàn)在信號矩陣的奇異值上,且前e個較大奇異值代表能量大且集中的主頻信號,其余奇異值代表波動信號[14]。
用一個秩為e的低秩矩陣來逼近原電壓Hankel矩陣,文獻(xiàn)[15]提出了通過Frobenius范數(shù)比的方法確定e值,即
(15)
a>μ。
(16)
式中:h=min{m,n};閾值μ取接近1的數(shù)值(如μ=0.999);e值為滿足式(16)的最小整數(shù)值。
逼近質(zhì)量可以用下式衡量:
‖A-Ae‖F(xiàn)。
(17)
m雖然可以衡量電壓波動程度,但面臨兩個問題,一是難以通過計算或測量獲取其準(zhǔn)確值;二是式(11)較為復(fù)雜且未知數(shù)較多,難以通過此式確定影響基于瞬時無功功率信號分析的異步電動機轉(zhuǎn)子斷條故障檢測的電壓波動閾值。為了解決上述問題,本文首創(chuàng)性提出電壓波動系數(shù)b的概念,其物理含義是電壓波動矩陣能量與整體電壓信號能量的比值。以之量化電壓波動程度,并通過數(shù)據(jù)擬合方式確定閾值。
(18)
電壓波動系數(shù)算法基本步驟總結(jié)如下:
1)根據(jù)采樣信號x[n],按式(14)構(gòu)造Hankel矩陣,并取數(shù)據(jù)長度的一半,將剩余的采樣點舍棄。注意,若N為奇數(shù)則有M=L=(N+1)/2。若N為偶數(shù)則有M=L=N/2,同時舍去最后最一個采樣點x(N)。
2)對矩陣A進(jìn)行奇異值分解,用一個秩為e的低秩矩陣逼近原電壓Hankel矩陣,通過Frobenius范數(shù)比的方法確定e值,并以式(17)來衡量逼近質(zhì)量。
3)由式(18)求取電壓波動系數(shù)b。
3 實驗與仿真
3.1 數(shù)據(jù)仿真
本文通過Simulink仿真平臺對一臺Y100L-2型(3 kW、380 V、6.23 A、50 Hz、2 880 r/min)的三相異步電動機進(jìn)行仿真實驗,電動機半載運行,轉(zhuǎn)差率s為1.09%,籠型異步電動機仿真電壓穩(wěn)定且轉(zhuǎn)子正常、電壓穩(wěn)定但轉(zhuǎn)子斷條故障、電壓波動但轉(zhuǎn)子正常時,定子電流信號和電壓信號分別模擬為:
(19)
(20)
(21)
仿真時,額定三相視在功率SN為4 104 VA。籠型異步電動機正常運行、發(fā)生轉(zhuǎn)子斷條故障、電壓波動情況下的瞬時無功功率頻率分量示于圖1,具體結(jié)果示于表1。圖2表示電壓波動時的時域信號和去除主頻分量后的頻域信號。
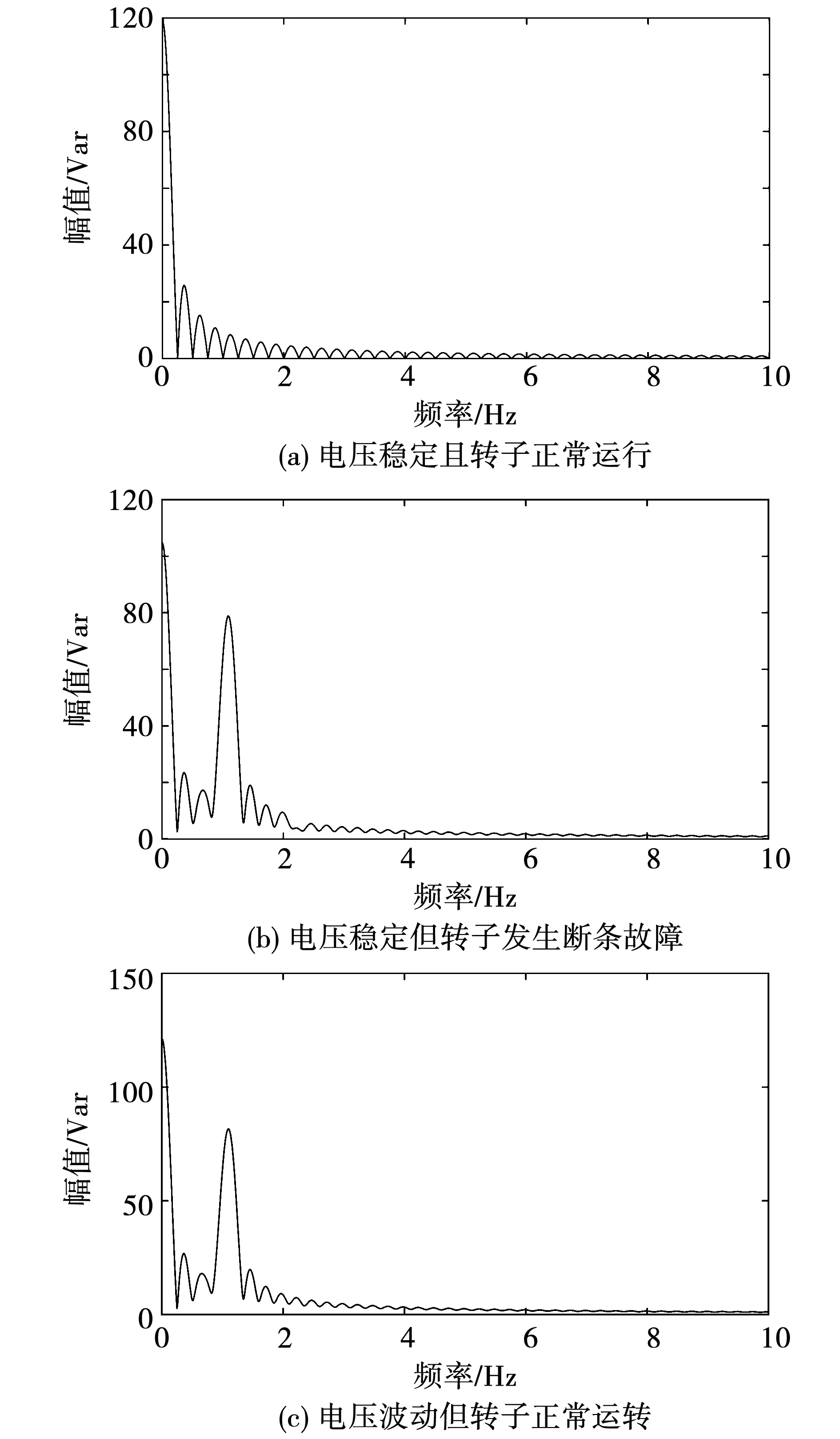
圖1 瞬時無功功率頻率圖
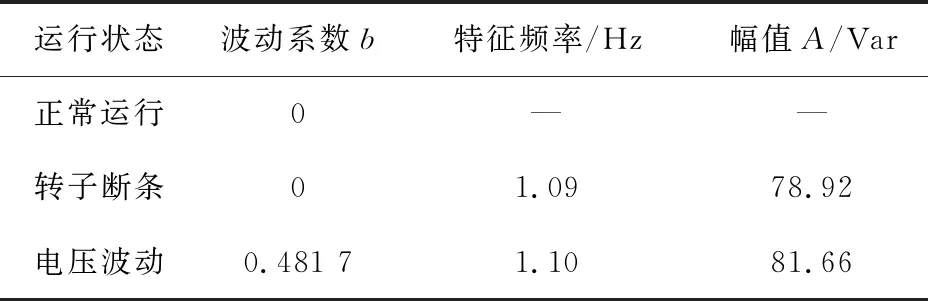
表1 仿真結(jié)果
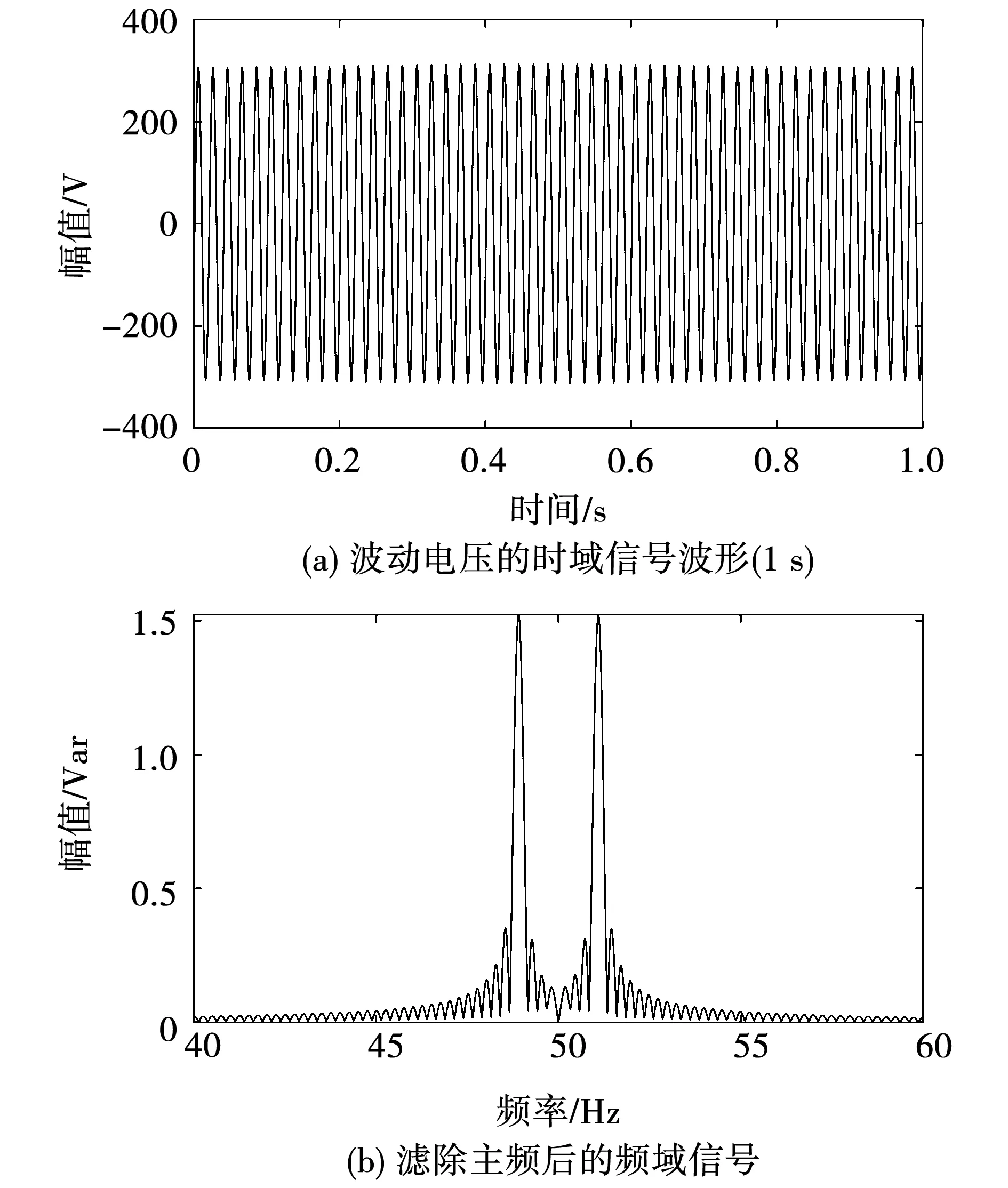
圖2 波動電壓信號
傳統(tǒng)的基于瞬時無功功率信號分析的轉(zhuǎn)子斷條檢測方法認(rèn)為,異步電動機發(fā)生轉(zhuǎn)子斷條故障時相較于電機正常運行,瞬時無功功率頻譜圖中出現(xiàn)頻率為2sf1特征頻率分量,可以此作為轉(zhuǎn)子斷條故障判據(jù)。實際上,電機正常運轉(zhuǎn)但電壓發(fā)生波動時,瞬時無功功率信號中也可能會出現(xiàn)相同的頻率分量,這將導(dǎo)致誤判。此外,電壓平穩(wěn)的情況下,無論正常運轉(zhuǎn)還是轉(zhuǎn)子斷條故障狀態(tài),其電壓波動系數(shù)都明顯小于電壓波動時的系數(shù),因此電壓波動系數(shù)可以作為標(biāo)準(zhǔn)來量化電壓波動的程度。為了進(jìn)一步探究電壓波動對轉(zhuǎn)子斷條故障檢測的影響,改變電壓調(diào)幅波幅值進(jìn)行了大量仿真,取其中10組結(jié)果于表2中,Mu為瞬時無功功率頻譜中因電壓波動產(chǎn)生的幅值與視在功率之比。
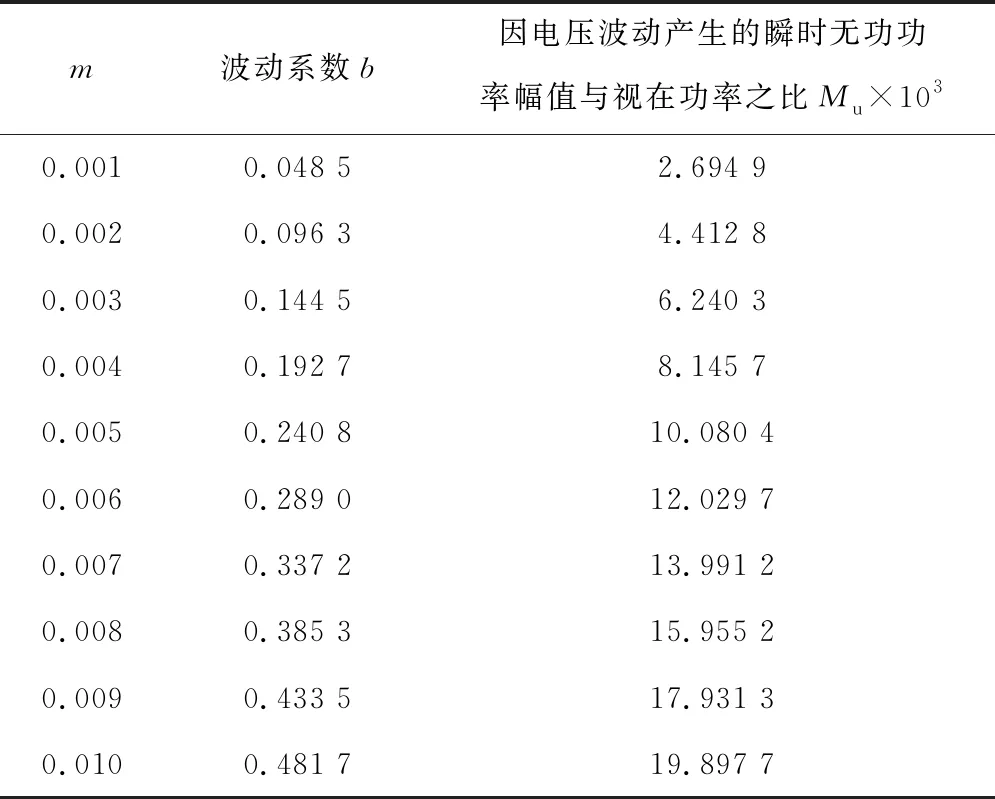
表2 電壓調(diào)幅波幅值改變后的仿真數(shù)據(jù)
通過多項式擬合法對波動系數(shù)b與幅值比值Mu進(jìn)行數(shù)據(jù)擬合,得到兩者關(guān)系,結(jié)果如圖3所示。表達(dá)式為
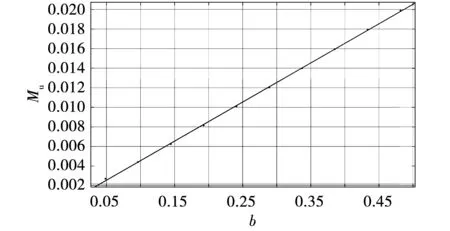
圖3 電壓波動系數(shù)b與因電壓波動產(chǎn)生的瞬時無功功率幅值與視在功率之比Mu的關(guān)系
Mu=0.039 96b+0.000 549 2。
(22)
式中各系數(shù)取置信區(qū)間中值,置信水平取95%,擬合優(yōu)度值為0.999 9。
隨著電壓波動程度的加深,因之產(chǎn)生的瞬時無功功率特征頻率的幅值也隨之增加, 兩者近似為正比關(guān)系。
由式(7)可知,電動機發(fā)生轉(zhuǎn)子斷條故障時其瞬時無功頻譜特征頻率分量的幅值與額定視在功率的比值Mq,約等于電流特征頻率幅值與定子電流主頻分量幅值之比,為0.02~0.05。由此,若因電壓波動而產(chǎn)生的無功頻譜峰值與額定視在功率的比值Mu大于0.01,則認(rèn)為電壓波動已然對轉(zhuǎn)子斷條故障的檢測產(chǎn)生了影響,選定Mu為0.01時的電壓波動系數(shù)b0為閾值。
由式(22)計算可得閾值為
b0=0.236 5。
(23)
需要注意的是,由于實驗條件限制,該閾值的準(zhǔn)確性僅在電壓等級380 V、型號為Y100L-2的籠型異步電動機上得到實驗驗證。對于其他型號電動機,可采用本文所述方法進(jìn)行求解驗證。
3.2 實驗數(shù)據(jù)
實驗采用的籠型異步電動機型號為Y100L-2,電動機參數(shù)示于表3。通過對導(dǎo)條人為鉆孔的方式來模擬轉(zhuǎn)子斷條故障,人為將其中一根導(dǎo)條在距端環(huán)10 mm處鉆孔,直徑達(dá)到6 mm,深度達(dá)到10 mm,實驗設(shè)備如圖4所示。
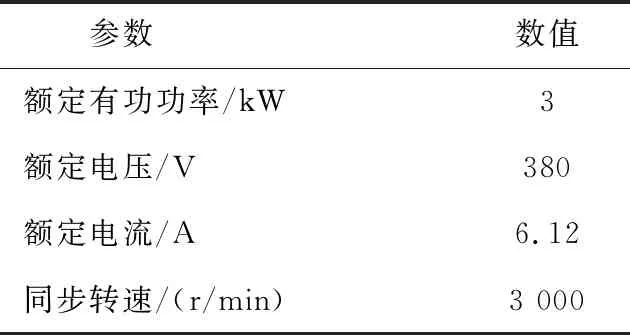
表3 電機參數(shù)
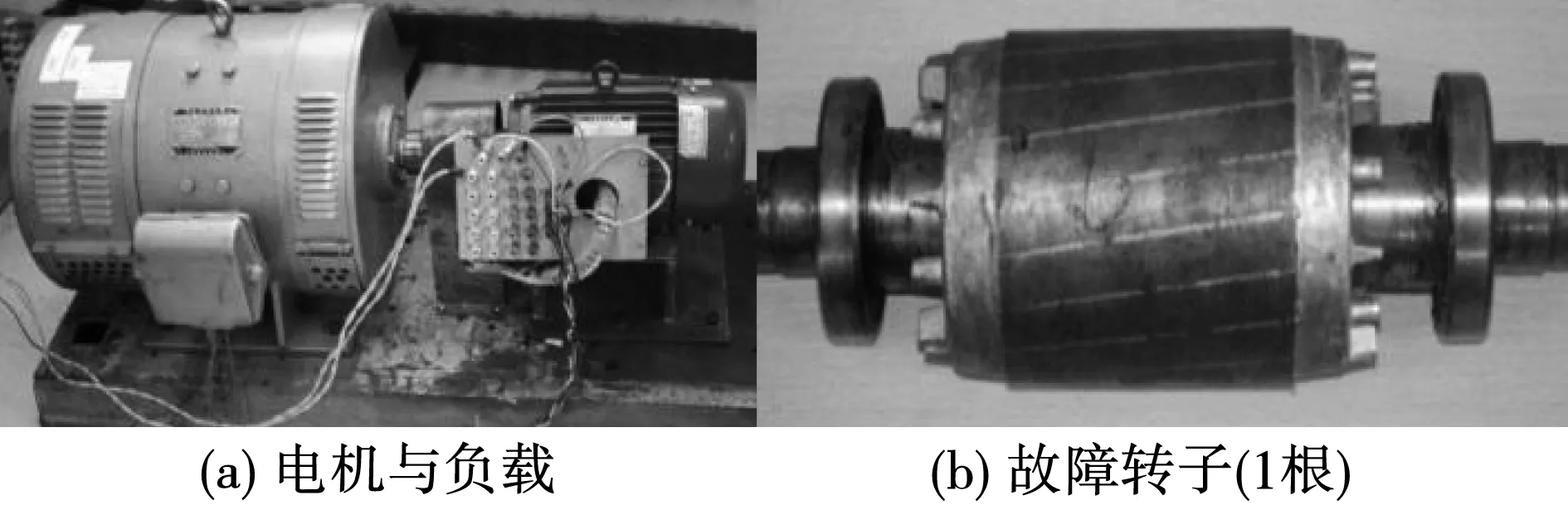
圖4 實驗設(shè)備
通過圖5所示實驗系統(tǒng)采集并分析電壓波動數(shù)據(jù)及相關(guān)電流數(shù)據(jù)。異步電動機Motor的一端通過調(diào)壓器與電網(wǎng)連接,另一端與負(fù)載連接,電網(wǎng)通過調(diào)壓器向異步電動機Motor提供電能。在異步電動機Motor與調(diào)壓器之間的三相線路上分別設(shè)置有電流互感器和電壓互感器,電流互感器用于測取流經(jīng)每相線路的定子電流,電壓互感器用于測取每相線路的供電電壓。通過數(shù)據(jù)采集系統(tǒng)中的數(shù)據(jù)采集卡分別采集電流互感器測取到的三相定子電流以及采集電壓互感器測取到的三相供電電壓。數(shù)據(jù)采集系統(tǒng)可以將采集到的三相定子電流與三相供電電壓輸出至計算機設(shè)備。信號采集卡采用瑞博華RBH8351型信號采集卡,便攜式計算機的型號是Thinkpad X100e。
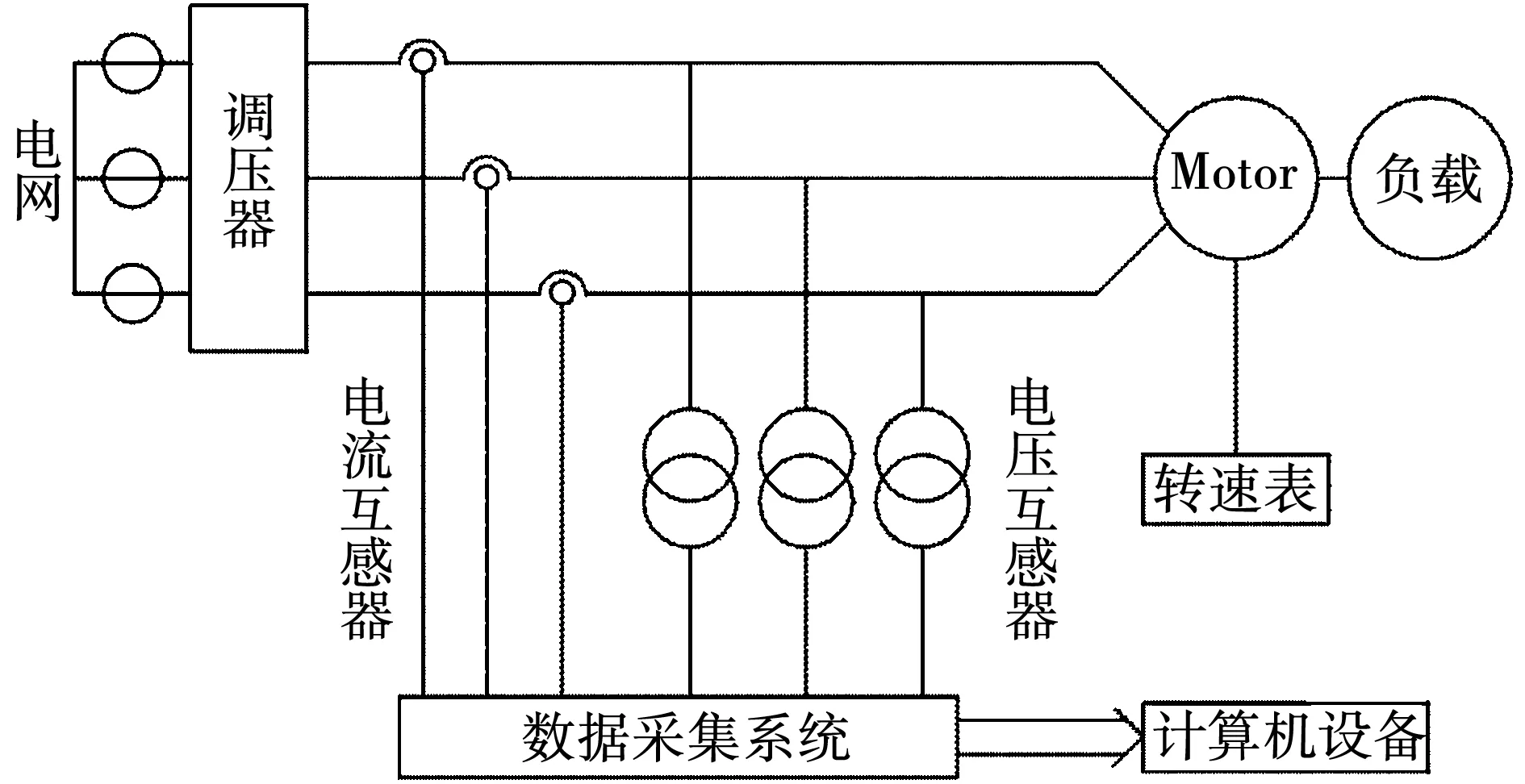
圖5 實驗接線圖
電機發(fā)生轉(zhuǎn)子斷條且電壓波動時,濾除主頻后的電壓頻譜示于圖6,瞬時無功功率頻譜圖示于圖7,電壓波動的檢測及其對轉(zhuǎn)子斷條診斷的影響示于表4。電機半載運行,轉(zhuǎn)差率s為2.37%,電壓主頻信號頻率為49.95 Hz,且50.97 Hz頻率分量處出現(xiàn)尖峰,因而調(diào)幅波存在頻率為1.02 Hz的分量,瞬時無功功率頻譜中相應(yīng)出現(xiàn)此頻率分量。轉(zhuǎn)子斷條故障特征頻率2sf1為2.37 Hz,顯然,此頻率分量幅值大于真正的轉(zhuǎn)子斷條特征頻率幅值。此時,電壓波動系數(shù)b為0.377 9,大于電壓波動系數(shù)閾值b0。
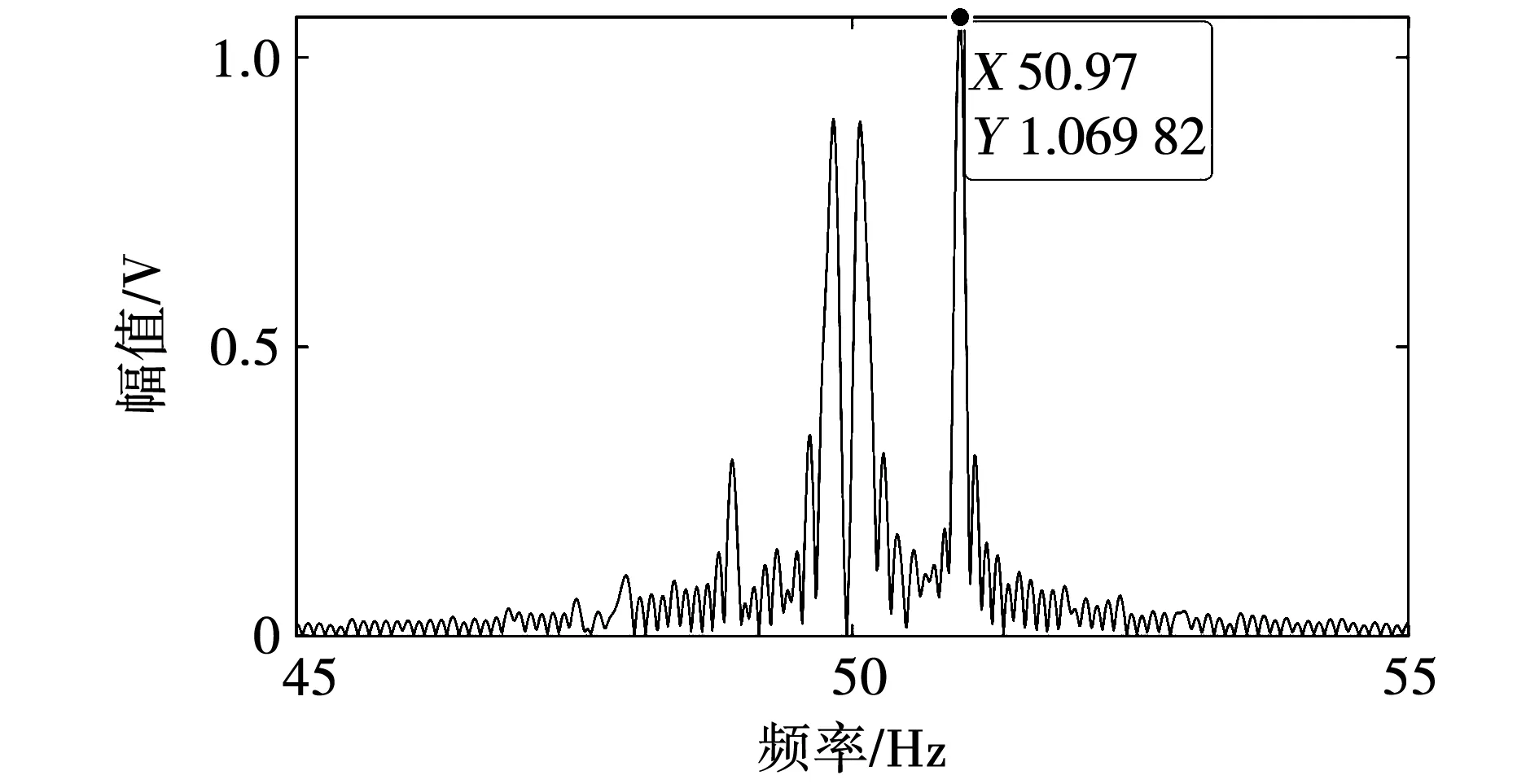
圖6 波動電壓頻率分量
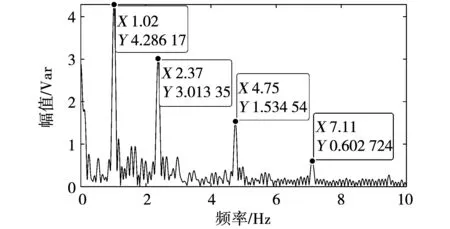
圖7 瞬時無功功率頻率分量

表4 電動機轉(zhuǎn)子斷條故障且電壓波動時,電壓波動的檢測及其對轉(zhuǎn)子斷條診斷的影響
電機轉(zhuǎn)子正常但電壓發(fā)生波動時,濾除主頻分量后電壓信號的頻譜示于圖8,瞬時無功功率頻譜圖示于圖9,電壓波動的檢測及其對轉(zhuǎn)子斷條診斷的影響示于表5。電壓主頻信號為49.97 Hz,且50.56 Hz頻率分量處出現(xiàn)尖峰,因而調(diào)幅波存在頻率為0.59 Hz的分量。注意瞬時無功功率頻譜中也相應(yīng)出現(xiàn)此頻率分量,該頻率分量介于0.5~5 Hz之間,可能被誤認(rèn)為轉(zhuǎn)子故障的特征頻率。此時,電壓波動系數(shù)b為0.356 8,大于電壓波動系數(shù)閾值b0。
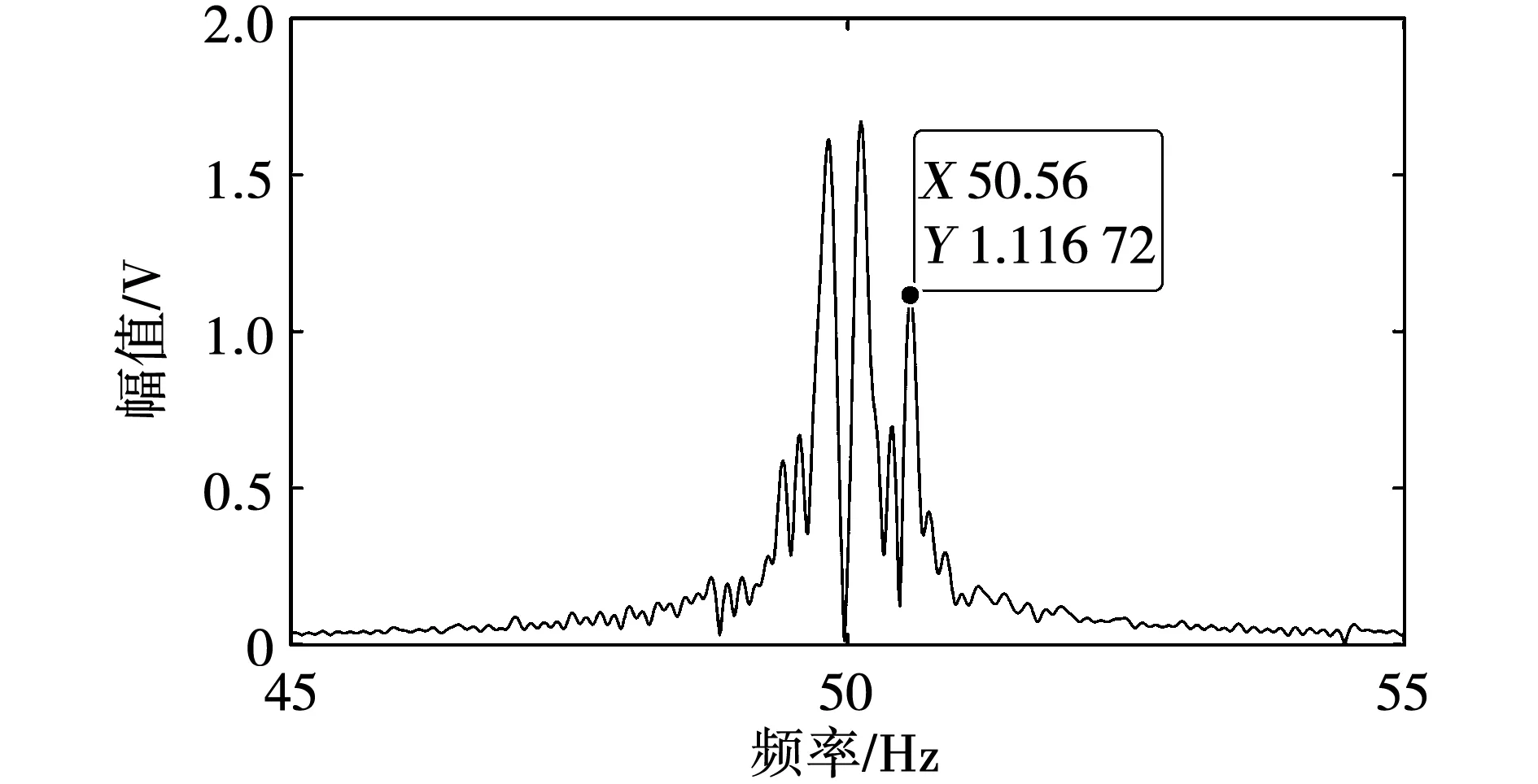
圖8 波動電壓頻率分量
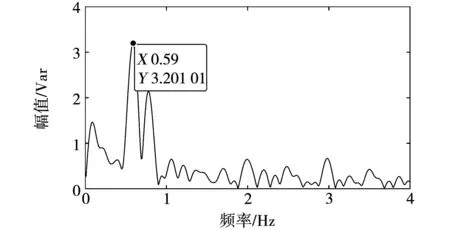
圖9 瞬時無功功率頻率分量

表5 電動機正常但電壓波動時,電壓波動的檢測及其對轉(zhuǎn)子斷條診斷的影響
綜上,電機正常運行或者發(fā)生轉(zhuǎn)子斷條故障時,電壓波動均會影響到瞬時無功功率檢測方法的準(zhǔn)確性。因此,為了完善傳統(tǒng)基于瞬時無功功率信號分析的異步電動機轉(zhuǎn)子斷條故障檢測方法,在使用該方法之前,首先進(jìn)行電壓波動判定。具體算法步驟如下:
1)采集3相定子電流無功信號和3相定子電壓信號(采樣頻率為1 000 Hz,采樣時長為40 s)。
2)取其中一相電壓信號us進(jìn)行初步分析,通過巴特沃斯帶通濾波保留45~55 Hz電壓信號,通過舍棄首末兩秒的數(shù)據(jù)來避免邊緣效應(yīng),對新的電壓信號利用滑動窗口法以1 s為步長,每10 s一段計算電壓波動系數(shù)。
3)選取最小的電壓波動系數(shù)與閾值b0比較,若小于閾值則提取此時三相電壓信號及三相電流信號。
4)利用步驟3)中三相電壓電流信號求取瞬時無功功率信號。
5)對瞬時無功功率信號進(jìn)行連續(xù)細(xì)化傅里葉變換,確定各頻率分量及其幅值。
圖10采樣信號為電動機電壓信號us,該電動機電壓平穩(wěn),但轉(zhuǎn)子斷條。電機半載運行,轉(zhuǎn)差率s為2.67%,將此電壓信號進(jìn)行巴特沃斯帶通濾波,求得波動系數(shù)b為0.189 9,與所選閾值(0.236 5)作比較,滿足要求展開頻譜分析,圖11為濾除主頻分量后該電壓的連續(xù)細(xì)化傅里葉頻譜圖,瞬時無功功率頻譜圖示于圖12中。
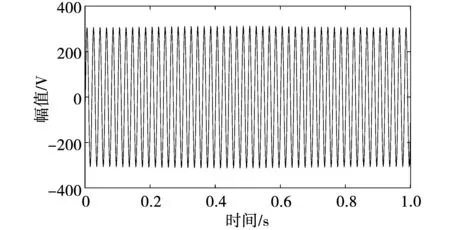
圖10 us的時域波形(1 s)
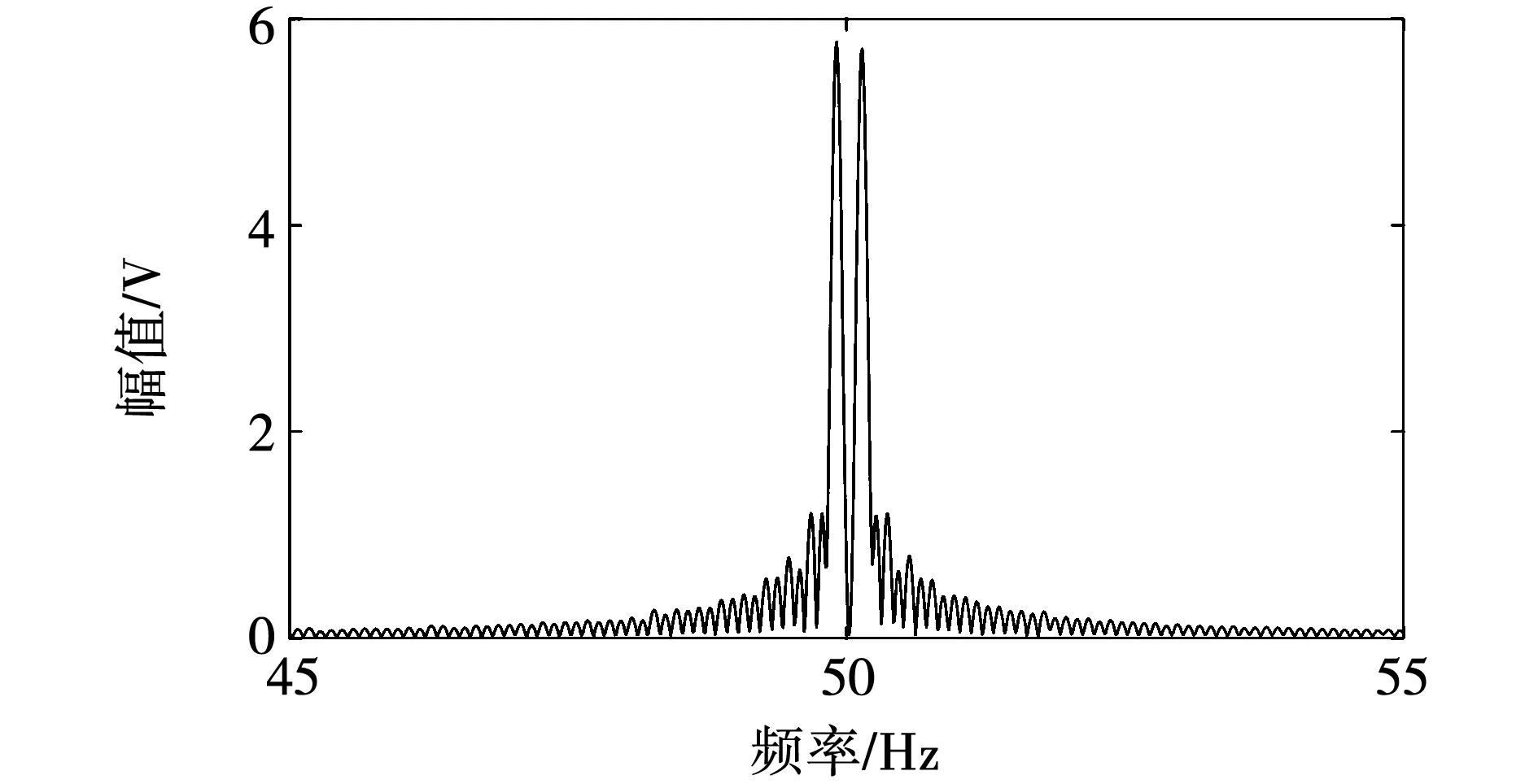
圖11 us的連續(xù)細(xì)化頻譜

圖12 瞬時無功功率頻譜分量
瞬時無功功率頻譜分量中未出現(xiàn)足以影響到檢測結(jié)果的因電壓波動而引入的頻率分量。上述三例實驗均對該方法的準(zhǔn)確性進(jìn)行了佐證。
4 結(jié) 論
在考慮電壓波動的情況下對轉(zhuǎn)子斷條故障展開研究,得出以下結(jié)論:
1)電壓波動中的調(diào)幅波的頻率分量會反映于瞬時無功功率頻譜中,該分量的幅值與電壓波動的大小有關(guān)。因而電壓波動會對基于瞬時無功功率信號分析的異步電動機轉(zhuǎn)子斷條故障檢測方法的準(zhǔn)確性造成影響。
2)利用SVD技術(shù)將電壓主頻信號與波動信號分開。前e個較大奇異值代表能量大且集中的主頻信號,其余奇異值代表波動信號。通過Frobenius范數(shù)比方法確定e值,以提取電壓波動信號。
3)文章提出電壓波動系數(shù),以量化電壓波動的大小,并且該系數(shù)可以反映電壓波動對無功功率方法的影響程度,推導(dǎo)了電壓波動系數(shù)檢測閾值。
4)完善傳統(tǒng)基于瞬時無功功率的轉(zhuǎn)子斷條故障檢測方法。在使用傳統(tǒng)方法之前首先進(jìn)行電壓波動判定,其突出優(yōu)勢在于能夠避免電壓波動的干擾,仿真和實驗證明該方法是切實可行的。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
中國生殖健康(2019年3期)2019-02-01 06:12:26
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(2015年3期)2015-11-11 17:20:00
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34