不同支鏈排布的3-PRS并聯(lián)機(jī)構(gòu)姿態(tài)能力比較
2022-10-11 06:16:08陳國旺范秋壘
制造技術(shù)與機(jī)床 2022年10期
陳國旺 范秋壘 羅 超
(①重慶智能機(jī)器人研究院,重慶 400714;②重慶大學(xué),重慶 400030;③四川輕化工大學(xué),四川自貢 643002)
文獻(xiàn)[1]首次提出零扭矩3-[PP]S類并聯(lián)機(jī)構(gòu),具有3個獨立自由度(2個轉(zhuǎn)動,1個平動:2R1T)。直至當(dāng)前,以2R1T運(yùn)動的3-[PP]S類并聯(lián)機(jī)構(gòu)作為裝備制造結(jié)構(gòu)本體的工業(yè)應(yīng)用已經(jīng)十分廣泛,如:Z3擺 角 頭[2]、A3擺 角 頭[3]、Tricept混 聯(lián) 機(jī) 床[4]和Exechon混聯(lián)機(jī)床[5]等。Z3擺角頭的本體結(jié)構(gòu)為3-PRS并聯(lián)機(jī)構(gòu)而A3擺角頭的本體結(jié)構(gòu)改為3-RPS并聯(lián)機(jī)構(gòu),Tricept的機(jī)構(gòu)模塊為3UPS-UP并聯(lián)機(jī)構(gòu),Exechon的并聯(lián)模塊為2UPR-SPR并聯(lián)機(jī)構(gòu)。
由于2R1T機(jī)構(gòu)本身運(yùn)動特性,2R1T并聯(lián)機(jī)構(gòu)成功應(yīng)用在機(jī)床領(lǐng)域。因其巨大商業(yè)價值,目前仍然有頗多國內(nèi)外學(xué)者研究2R1T變體機(jī)構(gòu),旨在找出性能更優(yōu),結(jié)構(gòu)更合理緊湊的2R1T機(jī)構(gòu)[6]。并聯(lián)機(jī)構(gòu)具有良好性能是能實際工程應(yīng)用的理論支撐和前提,因此,找出一個合理評價機(jī)構(gòu)性能的評價指標(biāo)顯得尤其重要。劉辛軍等[7-8]提出用于并聯(lián)機(jī)構(gòu)優(yōu)化設(shè)計的運(yùn)動/力傳遞性能指標(biāo)。Wang FB等[9]得到2-UPR-SPR并聯(lián)機(jī)構(gòu)局部傳遞性能指標(biāo)和全域性能指標(biāo),將其作為機(jī)構(gòu)運(yùn)動/力傳遞性能評價準(zhǔn)則,獲得2-UPR-SPR 并聯(lián)機(jī)構(gòu)的相關(guān)指標(biāo)性能圖譜和優(yōu)化結(jié)果。Assal S等[10]基于無量綱設(shè)計參數(shù)空間,以工作空間指數(shù)(WI),運(yùn)動/力傳遞指數(shù),運(yùn)動和動態(tài)靈活指數(shù)以及剛度指數(shù)作為綜合性能評估。Pond G等[11]運(yùn)用條件數(shù)和奇異值,對3種不同布局的3-PRS機(jī)構(gòu)進(jìn)行了優(yōu)化比較,選出了最適于工業(yè)應(yīng)用的布局。Sun T等[12]運(yùn)用3-PRS機(jī)構(gòu)雅可比矩陣的條件數(shù)作為全局性能指標(biāo),綜合考慮伴隨運(yùn)動及實際工程運(yùn)動約束,采用非線性規(guī)劃方法對3-PRS機(jī)構(gòu)進(jìn)行了優(yōu)化設(shè)計。Gao Z等[13]運(yùn)用并聯(lián)機(jī)構(gòu)的系統(tǒng)剛度和靈巧度來優(yōu)化機(jī)構(gòu)的結(jié)構(gòu)尺寸。Liu X J等[14]運(yùn)用條件數(shù)及剛度來優(yōu)化并選擇三自由度球面并聯(lián)機(jī)構(gòu)的連桿長度并分析機(jī)構(gòu)操作性能。
確定并聯(lián)機(jī)構(gòu)的評價指標(biāo)后,可以建立并聯(lián)機(jī)構(gòu)尺度優(yōu)化模型。尺度優(yōu)化模型包括機(jī)構(gòu)結(jié)構(gòu)參數(shù),材料選擇(決策變量)、機(jī)構(gòu)避免奇異位置的幾何條件及實際工況下的幾何條件(約束條件)及單個或多個性能指標(biāo)取得極值(目標(biāo)函數(shù))。目前,學(xué)者對尺度優(yōu)化模型的研究主要集中在含約束條件的優(yōu)化目標(biāo)函數(shù)。Belkacem B[15]建立基于運(yùn)動-彈性靜力學(xué)性能的多目標(biāo)優(yōu)化模型,然后使用進(jìn)化遺傳算法來找出相互沖突的多個目標(biāo)函數(shù)之間的所有可能權(quán)重。He K等[16]選擇工作空間體積、靈巧度、靜態(tài)效率和剛度作為多目標(biāo)優(yōu)化的目標(biāo)函數(shù),優(yōu)化機(jī)構(gòu)的結(jié)構(gòu)參數(shù)。Huang GY等[17]建立基于末端執(zhí)行器的剛度模型和靈活性的多目標(biāo)優(yōu)化模型,利用遺傳算法進(jìn)行多目標(biāo)優(yōu)化,得到Pareto前沿圖。侯雨雷等[18]以機(jī)構(gòu)姿態(tài)工作空間的點數(shù)為優(yōu)化目標(biāo),分別建立3-PCSS/S、3-PSS/S球面并聯(lián)肩關(guān)節(jié)仿生機(jī)構(gòu)的約束優(yōu)化模型,再采用遺傳算法(GA)優(yōu)化機(jī)構(gòu)尺寸參數(shù),得到較好優(yōu)化結(jié)果。Wang L P等[19]提出統(tǒng)一逆運(yùn)動學(xué)、雅可比矩陣和運(yùn)動/力傳遞指標(biāo)模型。在此基礎(chǔ)上,對關(guān)鍵結(jié)構(gòu)參數(shù)進(jìn)行優(yōu)化設(shè)計。
以兩種3-PRS并聯(lián)機(jī)構(gòu)為研究對象(文中稱為機(jī)構(gòu)A、B),第一章對機(jī)構(gòu)A、B結(jié)構(gòu)進(jìn)行了簡要描述。第二章,分別建立了兩者的位置反解模型。第三章,基于文獻(xiàn)[7]提出的運(yùn)動/力傳遞指標(biāo),提出以滿足許用運(yùn)動/力傳遞指標(biāo)的封閉曲線的最大內(nèi)切圓半徑κGTOC為優(yōu)化目標(biāo)函數(shù),滿足機(jī)構(gòu)全局運(yùn)動/力傳遞指標(biāo)GTI為約束條件,建立一個有約束單目標(biāo)約束優(yōu)化模型。第四章運(yùn)用DE優(yōu)化算法求解上述第三章優(yōu)化模型,得到結(jié)構(gòu)最優(yōu)結(jié)構(gòu)參數(shù),并用實例分別比較機(jī)構(gòu)A、B優(yōu)化前后的運(yùn)動/力傳遞性能。第五章對該論文進(jìn)行了精簡總結(jié)。
1 3-PRS并聯(lián)機(jī)構(gòu)結(jié)構(gòu)描述
以下機(jī)構(gòu)均為兩轉(zhuǎn)動一移動(2R1T)3自由度3-PRS并聯(lián)機(jī)構(gòu)。圖1為Z3并聯(lián)機(jī)構(gòu)[20],稱為機(jī)構(gòu)A。圖2為通過改變支鏈排布得到的Z3變異結(jié)構(gòu),稱為機(jī)構(gòu)B。
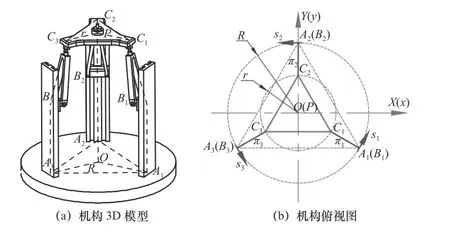
圖1 3-PRS并聯(lián)機(jī)構(gòu)A(Z3)
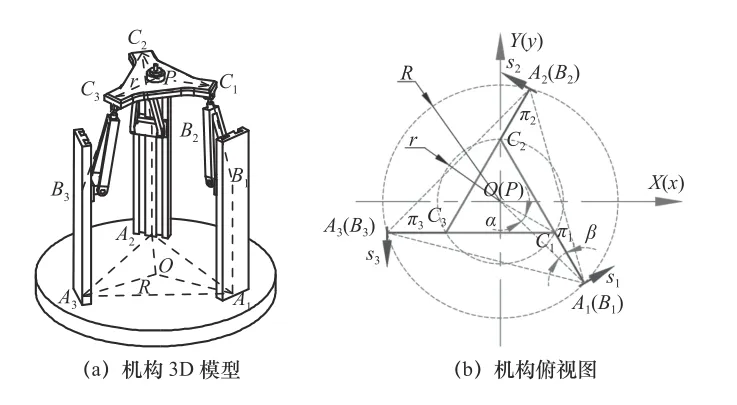
圖2 3-PRS并聯(lián)機(jī)構(gòu)B
如圖1a為A機(jī)構(gòu)三維運(yùn)動簡圖。該機(jī)構(gòu)由動平臺C1C2C3,定平臺A1A2A3以及3條結(jié)構(gòu)相同的PRS支鏈組成,動、定平臺均為正三角形。自定平臺起,P副軸線過定平臺理論頂點Ai且垂直定平臺平面,R副軸線垂直P副軸線,S副與動平臺理論頂點Ci重合(i=1,2,3)。支鏈其單位矢量為u i,R、r分別為定、動平臺外接圓的半徑,為移動驅(qū)動副(i=1,2,3)。在定平臺上建立定坐標(biāo)系(或稱為參考坐系){f}:OXYZ,X軸正向平行矢量A1A3,Y軸正向與矢量A1A3垂直,按右手法則確定Z軸。在動平臺上建立運(yùn)動坐標(biāo)系{m}:Pxyz,其軸線方向和定坐標(biāo)系軸線方向一致。機(jī)構(gòu)A展開圖中,點Ai與Bi(i=1,2,3)重合及動、定平臺角平分線重合,各支鏈輸入旋量si(i=1,2,3),3條支鏈BiCi(i=1,2,3)分別被限制在過定平臺對角線的3個平面πi內(nèi)運(yùn)動(i=1,2,3),如圖1b所示。
用上述方法,描述圖2機(jī)構(gòu)B。機(jī)構(gòu)B組成結(jié)構(gòu)和機(jī)構(gòu)A相同。如圖2a為機(jī)構(gòu)B三維運(yùn)動簡圖。對機(jī)構(gòu)B:定坐標(biāo)系(參考坐標(biāo)系){f}和運(yùn)動坐標(biāo)系{m}與機(jī)構(gòu)A相同。機(jī)構(gòu)B展開圖中,點Ai與Bi(i=1,2,3)重合,動、定平臺角平分線夾角為α(第二節(jié)已求解α),3條支鏈BiCi(i=1,2,3)分別被限制在平面πi(i=1,2,3)內(nèi)運(yùn)動,3平面與動平臺理論邊線重合,如圖2b所示。
2 3-PRS并聯(lián)機(jī)構(gòu)位置反解模型
用Z-Y-Z型Euler角(φ,θ,ψ)表示3-PRS并聯(lián)機(jī)構(gòu)動平臺的運(yùn)動姿態(tài)。表示其姿態(tài)的旋轉(zhuǎn)矩陣為
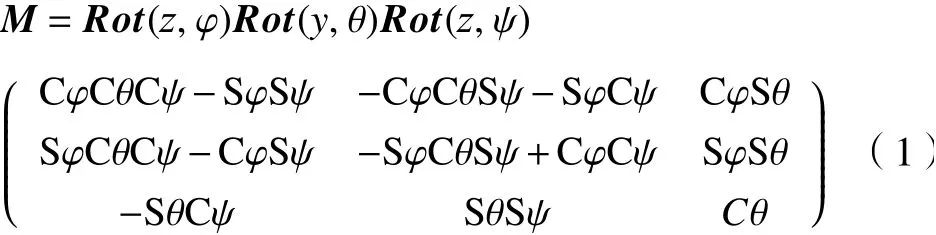
式中:Rot(y,θ)表示繞y軸轉(zhuǎn)θ角的旋轉(zhuǎn)矩陣,其余類似;Sθ、Cθ是正弦函數(shù)sinθ和余弦函數(shù)cosθ的縮寫,其余類似。
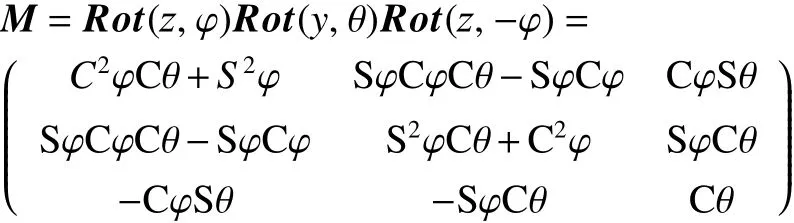
據(jù)圖1可知,可得并聯(lián)機(jī)構(gòu)A位置反解方程。由文獻(xiàn)[20]結(jié)論可得,并聯(lián)機(jī)構(gòu)A沒有繞動平臺法線的扭轉(zhuǎn),此時滿足ψ=-φ。故,機(jī)構(gòu)A姿態(tài)矩陣可表示為
設(shè)動平臺參考點P為P=(XP,YP,ZP)T,點Ai在定系{f}:OXYZ中的坐標(biāo)矢量為

式中:ξi=(4i-5)π/6(i=1,2,3),其余類似。
點Ci在動系{m}:Pxyz中的坐標(biāo)矢量分別為

則C點在定系{f}:OXYZ中的坐標(biāo)矢量為

那么,移動驅(qū)動桿長qi可表示為


由于支鏈BiCi(i=1,2,3)被限定在特定的平面內(nèi)運(yùn)動,故有平面約束方程組
已知動平臺位姿ZP和(θ,φ)時,可由式(7)求出動平臺參考點P的XP和YP表達(dá)式,即XP、YP為機(jī)構(gòu)伴隨運(yùn)動。
Z3并聯(lián)機(jī)構(gòu)的位置反解方程可用式(5)求得。
同理,據(jù)圖2可知,可得機(jī)構(gòu)B位置反解方程。機(jī)構(gòu)B有繞動平臺法線的扭轉(zhuǎn),此時ψ+φ≠0。故,機(jī)構(gòu)B姿態(tài)矩陣用式(1)表示。
設(shè)動平臺參考點P為P=(XP,YP,ZP)T,點Ci在動系{m}中坐標(biāo)矢量為式(3),點Ai在定系{f}中的坐標(biāo)矢量為

C點在定系{f}中的坐標(biāo)矢量為式(4),移動驅(qū)動桿長qi可表示為式(5),Bi點坐標(biāo)表示為式(6)。
機(jī)構(gòu)B中平面約束方程組為
由于機(jī)構(gòu)B伴隨運(yùn)動表達(dá)式較復(fù)雜,這里設(shè)式(1)姿態(tài)矩陣為
同理,由式(1)、(10)、(11)可求得機(jī)構(gòu)伴隨運(yùn)動XP、YP、ψ如下。
并聯(lián)機(jī)構(gòu)B的位置反解方程也可用式(5)求得。
3 機(jī)構(gòu)性能分析
3.1 機(jī)構(gòu)運(yùn)動/力傳遞指標(biāo)
據(jù)文獻(xiàn)[20-21]的研究結(jié)論可知,機(jī)構(gòu)A,B動平臺均受3個約束純力。純力分別過球副中心Ci且垂直于動平臺對角線PCi(i=1,2,3)。故,機(jī)構(gòu)A、B的約束力旋量(constraint wrench screw,CWS)可分別表示為
式中:i=1,2,3。
由于各支鏈的P副為驅(qū)動副,輸入運(yùn)動為沿Z軸純移動,故機(jī)構(gòu)A、B的輸入運(yùn)動旋量(input twist screw,ITS)均為

各支鏈的傳遞力旋量(transmission wrench screw,TWS)均為純力,過點Bi且沿BiCi方向。故機(jī)構(gòu)的TWS為

設(shè) 機(jī) 構(gòu) 的 輸 出 運(yùn) 動 旋量(output twist screw,OTS)為

式中:s i為第i支鏈OTS的軸線單位矢量(主部);r i為第i支鏈OTS軸線上一點的坐標(biāo)矢量;hi為第i支鏈OTS的節(jié)距。
根據(jù)互易旋量關(guān)系,可得[22]

式中:Π為對偶算子,為3階單位矩陣;03為3階0方陣。
據(jù)文獻(xiàn)[24-25]的定義,第i支鏈的輸入傳遞指標(biāo)(input transmission index,ITI)為

第i支鏈的輸出傳遞指標(biāo)(output transmission index,OTI)為
于是,機(jī)構(gòu)A、B的LTI可表示為

3.2 機(jī)構(gòu)優(yōu)質(zhì)傳遞姿態(tài)工作空間
若已知機(jī)構(gòu)尺寸參數(shù)l,r,當(dāng)給定定平臺結(jié)構(gòu)參數(shù)R及動平臺參考點P的坐標(biāo)ZP時,機(jī)構(gòu)ηLTI為姿態(tài)角φ、θ的函數(shù),即

將所有滿足ηLTI(φ,θ)≥[ηLTI]的姿態(tài)(φ,θ)集合,定義為機(jī)構(gòu)的ZP截面優(yōu)質(zhì)傳遞姿態(tài)工作空間(good transmission orientational workspace,GTOW)。其中,[ηLTI]為許用傳遞指標(biāo),本文取[ηLTI]=0.7。以點θ=0為圓心,作出GTOW的最大內(nèi)切圓(maximum inscribed circle,MIC)(圖3藍(lán) 色 粗 虛 線 繪 制 的 圓 為MIC即κGTOC),稱為機(jī)構(gòu)的GTOC。以下用GTOW的最大內(nèi)切圓半徑度量GTOC,并記作
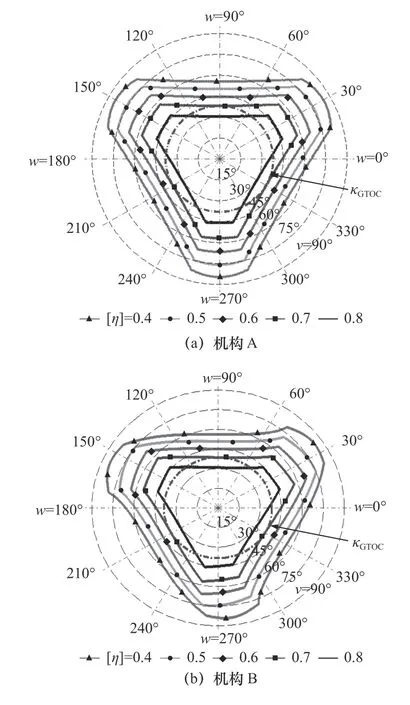
圖3 優(yōu)化前機(jī)構(gòu)LTI等高線(ZP=100 mm)

對于給定的ZP,將GTOW的最大內(nèi)切圓內(nèi)的所有姿態(tài)集合記為

對ΩGTOC內(nèi)的所有姿態(tài)(φ,θ),求ηLTI(φ,θ)的均值,稱為機(jī)構(gòu)的ZP截面GTI,其表達(dá)式為

3.3 機(jī)構(gòu)性能比較分析實例
機(jī)構(gòu)A、B均取經(jīng)驗尺寸參數(shù),R=100 mm,r=70 mm,L=400 mm。采用第3節(jié)的性能方法分析機(jī)構(gòu)A、B的運(yùn)動/力傳遞特性。
如圖3所示,為兩機(jī)構(gòu)的局部傳遞性能指標(biāo)分布曲線。由于沿ZP方向的移動,對3-PRS并聯(lián)機(jī)構(gòu)的姿態(tài)無影響,因此,可取一固定截面,研究機(jī)構(gòu)整體的姿態(tài)能力,本文取ZP=100 mm。機(jī)構(gòu)A(Z3主軸頭)的ZP=100 mm截平面內(nèi)的LTI等高線如圖3a所示,[η]=0.4時,最外圍紅色邊界曲線附近區(qū)域?qū)?yīng)機(jī)構(gòu)姿態(tài)能力較差,及機(jī)構(gòu)較易形成或接近奇異位姿,即機(jī)構(gòu)運(yùn)動/力傳遞性能不良好。[η]=0.7圍成的藍(lán)色實線區(qū)域為機(jī)構(gòu)優(yōu)質(zhì)傳遞工作空間(GTOW),其運(yùn)動遠(yuǎn)離奇異位置,這也是理想軌跡規(guī)劃空間。在GTOW內(nèi),機(jī)構(gòu)運(yùn)動/力傳遞效率較高,傳遞性能優(yōu)良。在不同傾擺角ω下,Z3機(jī)構(gòu)的性能分布曲線沿豎直方向呈軸對稱圖形。在方位角ω=30°、150°、270°區(qū)域,傾擺角范圍較大,其余區(qū)域傾擺能力一般。因κGTOC表示任意方位角下均可達(dá)的最大姿態(tài)能力,由GTOW邊界上的最小傾擺角確定。經(jīng)計算得優(yōu)化前Z3機(jī)構(gòu)的κGTOC=38.02°。
同理,在不同傾擺角ω下,機(jī)構(gòu)B的性能分布曲線也成單軸對稱圖形,如圖3b所示。在方位角ω=30°、150°、270°區(qū)域,傾擺角范圍均較大,而其余方位角下的擺動性能較差。機(jī)構(gòu)κGTOC=38.48°。
經(jīng)比較,機(jī)構(gòu)A相對機(jī)構(gòu)B,其κGTOC增加0.46°,說明變異后的Z3機(jī)構(gòu)同樣有良好的姿態(tài)能力。同時,可應(yīng)用機(jī)構(gòu)κGTOC,定量篩選不同支鏈排布的同類并聯(lián)機(jī)構(gòu)。
4 機(jī)構(gòu)姿態(tài)能力優(yōu)化
4.1 機(jī)構(gòu)姿態(tài)能力優(yōu)化模型與算法
由于按一定比例縮放機(jī)構(gòu)尺度,機(jī)構(gòu)性能指標(biāo)不變和Z軸方向的位移不會影響機(jī)構(gòu)的姿態(tài),因此,可預(yù)先給定定平臺結(jié)構(gòu)參數(shù)R和工作空間截面高度ZP,以尺度參數(shù)(r,l)為結(jié)構(gòu)設(shè)計變量,即決策變量為

根據(jù)實際應(yīng)用需要,設(shè)計者期望機(jī)構(gòu)具有盡可能大的姿態(tài)能力,因此,可將目標(biāo)函數(shù)設(shè)置為

設(shè)計者通常期望機(jī)構(gòu)具有良好運(yùn)動/力傳遞性能,因此,機(jī)構(gòu)運(yùn)動過程中GTI應(yīng)較大。于是,引入以下約束條件。

綜上可知,機(jī)構(gòu)A、B的GTOC最大化設(shè)計問題均為非線性約束優(yōu)化模型,其目標(biāo)函數(shù)為式(23),約束函數(shù)為式(24)。
應(yīng)用DE算法求解機(jī)構(gòu)約束優(yōu)化問題式(23)時,還需處理不等式約束函數(shù)式(24)。文中應(yīng)用DEB[27]提出的可行性規(guī)則處理約束函數(shù),為此,引入候選解x的約束違反度函數(shù)

比較兩個候選解的DEB規(guī)則為:對于任意兩個候選解x1和x2,若滿足以下條件之一:
(1)fv(x1)=0且fv(x2)>0。
(2)fv(x1)=fv(x2)=0且N(x1)>N(x2)。
(3)fv(x2)>fv(x1)>0。
則x1優(yōu)于x2。
應(yīng)用DE算法求解第4.1節(jié)機(jī)構(gòu)尺度優(yōu)化模型的計算流程圖4所示。
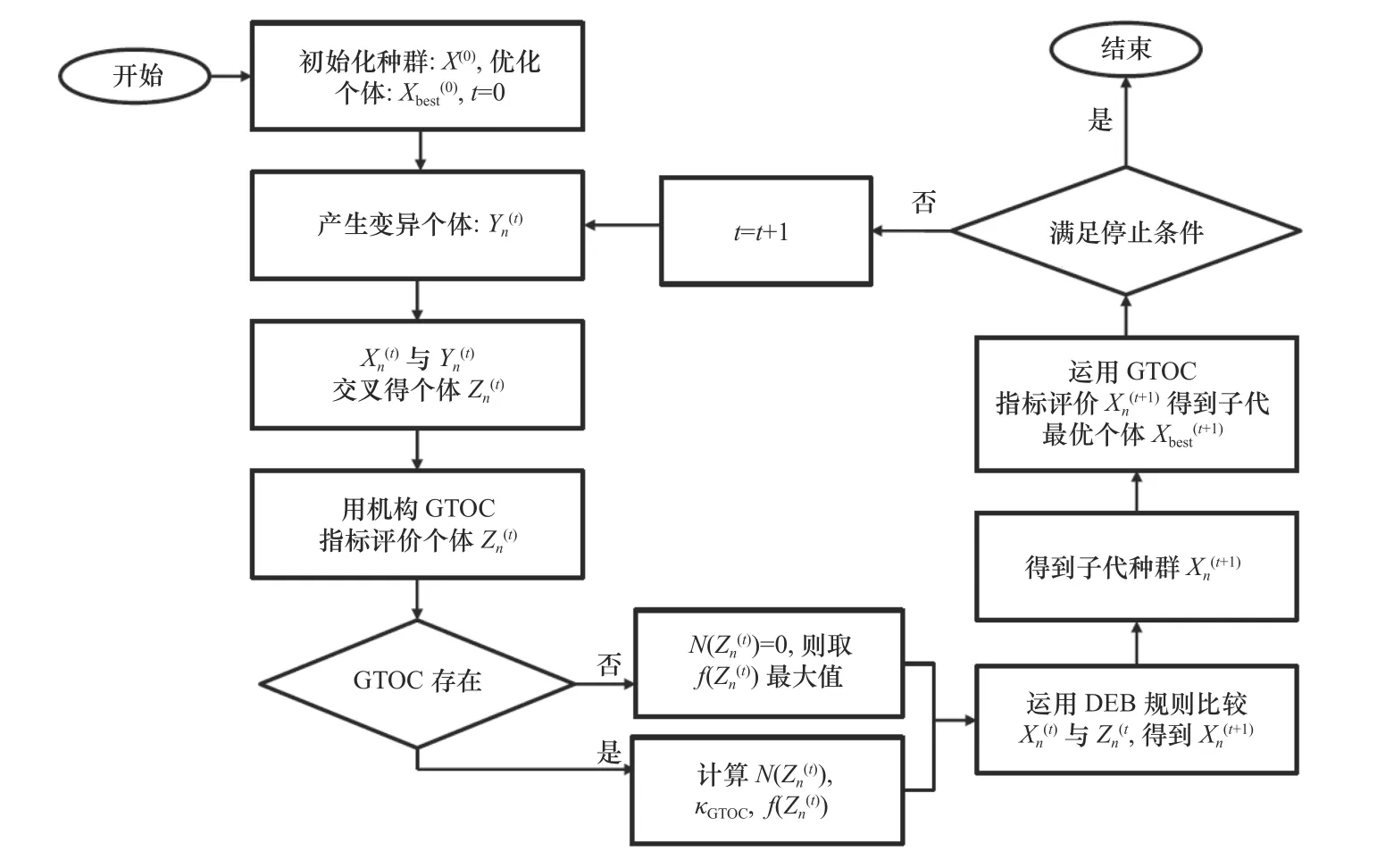
圖4 求解機(jī)構(gòu)尺度優(yōu)化問題的DE算法框圖
4.2 機(jī)構(gòu)姿態(tài)能力優(yōu)化實力
給定機(jī)構(gòu)定平臺外接圓半徑R=100 mm,由于ZP方向的移動與機(jī)構(gòu)姿態(tài)角獨立,無相互影響,因此,可設(shè)機(jī)構(gòu)ZP=100 mm,由DE算法求出4.1節(jié)優(yōu)化模型機(jī)構(gòu)A、B的最優(yōu)解分別為r=79 mm,L=589 mm;r=76 mm,L=546 mm。運(yùn)用3.3節(jié)方法繪制機(jī)構(gòu)A,B優(yōu)化后的性能邊界曲線,如圖5所示。分別對比優(yōu)化后機(jī)構(gòu)A、B的姿態(tài)能力,兩者傾擺能力較好區(qū)域仍然在方位角ω=30°,150°,270°處,其余方位角的傾擺角依然較小。優(yōu)化后,機(jī)構(gòu)A、B的κGTOC分別為40.67°,40.52°,略微減小0.15°。但是,分別比較優(yōu)化前后的機(jī)構(gòu)A或機(jī)構(gòu)B,增長角度比較可觀,分別增長2.65°,2.04°,說明優(yōu)化模型與方法是十分有效的,數(shù)據(jù)如表1所示。
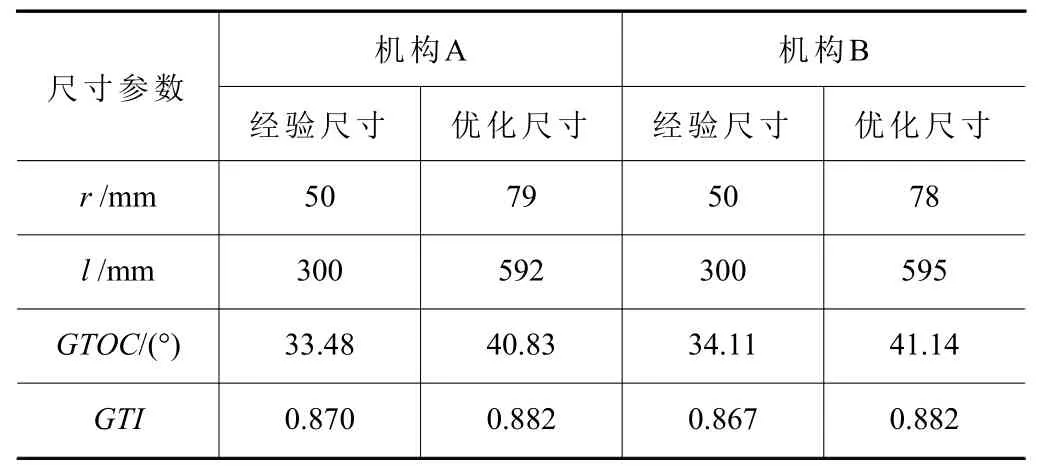
表1 機(jī)構(gòu)κGTOC比較
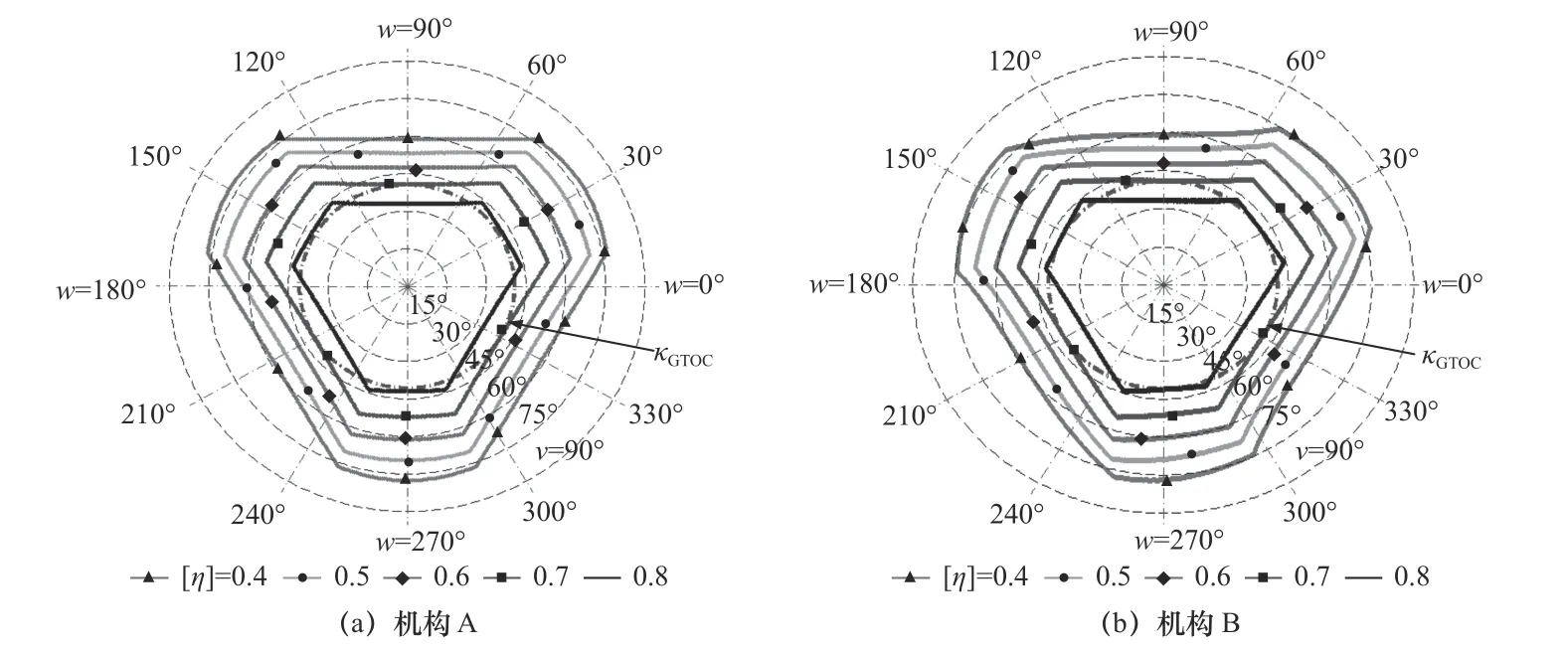
圖5 優(yōu)化后機(jī)構(gòu)LTI等高線(ZP=100 mm)
5 結(jié)語
(1)以旋量理論為理論基礎(chǔ),建立機(jī)構(gòu)局部性能指標(biāo)LTI的解析計算式,并給出全域指標(biāo)GTI的計算方法。
(2)在給出GTOC模型基礎(chǔ)上,建立機(jī)構(gòu)最大內(nèi)切圓半徑κGTOC最大化的尺度參數(shù)約束優(yōu)化設(shè)計模型。給出應(yīng)用DE算法求解該問題的步驟和約束處理方法。
(3)變異前后機(jī)構(gòu)的比較分析表明,相同尺寸的機(jī)構(gòu)之間的κGTOC差異較小,優(yōu)化前機(jī)構(gòu)B比機(jī)構(gòu)A的GTOC稍大0.63、GTI稍小0.003。通過DE算法優(yōu)化后,兩種機(jī)構(gòu)的GTOC、GTI指標(biāo)均得到改善,機(jī)構(gòu)A的GTOC、GTI分別提高了7.35、0.012;機(jī)構(gòu)B的GTOC、GTI提高了7.03、0.015。優(yōu)化后機(jī)構(gòu)B比機(jī)構(gòu)A的GTOC稍大0.31、GTI沒有變化。結(jié)果表明,求解機(jī)構(gòu)尺度優(yōu)化DE優(yōu)化算法是可行有效的。[1]Z latanov D,Bonev I A,Gosselin C M.Constraint singularities of parallel mechanisms[C].2002 IEEE International Conference on Robotics and Automation (ICRA 2002),2002,1:496-502.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
