計及儲能調節的時滯互聯電力系統頻率控制
2022-10-08 07:08:42丁枳尹
上海交通大學學報 2022年9期
“雙碳”目標下,新能源發電接入跨區域電網的比例逐年增加,但是由于新能源發電的隨機性和間歇性,如何有效保證電力系統頻率穩定成了一大問題.頻率作為衡量電能質量的關鍵指標之一,其穩定性已經成為電網運行的現實要求.
為了有效解決功率波動產生的頻率偏差過大問題,提高互聯電力系統中可調發電單元的調頻能力,負荷頻率控制技術被廣泛應用于互聯電網.現代電力系統通常由多個區域電網互聯組成,電網規模的擴大會使信號在傳輸過程中存在各種時滯問題,時滯的存在會使負荷頻率控制器不能及時地接收信號和發出各種控制指令,從而無法實現預期的頻率調控目標,甚至還會影響電力系統的動態穩定.因此,在研究電力系統負荷頻率控制的過程中考慮延時的影響對于提升電力系統的頻率穩定有重要作用.
國內外很多學者針對時滯電力系統的負荷頻率控制進行了大量研究.文獻[8]綜合考慮時滯靈敏度指標和系統阻尼,通過多目標優化算法求解廣域電力系統穩定器參數,有效抑制系統區域間的低頻振蕩.文獻[9]通過構造含時滯依賴矩陣的李雅普諾夫泛函實現對時滯電力系統的穩定性分析.文獻[10]針對交直流混聯系統提出了直流附加頻率控制和自動發電控制的協調策略,克服了時滯和參數不確定的影響.文獻[11]提出了在時滯條件下利用電動汽車和電熱泵協調控制系統頻率的策略,但是電動汽車和電熱泵的調頻性能會受到用戶使用習慣的影響.文獻[12]將基于滑模算法的新型無模型控制器應用于含電動汽車的時滯孤島微電網的二次調頻中,但是并沒有考慮互聯電網.文獻[13]雖然針對時滯互聯電力系統的頻率穩定設計了基于滑模算法的負荷頻率控制器,但是滑模控制結構復雜,難以實現工程應用.比例積分微分(PID)控制由于設計簡單、工程應用方便而常被用來設計負荷頻率控制器.但是PID控制算法需要應用在系統穩定工作點附近才能發揮出不錯的控制效果,新能源的接入以及通信延遲的存在使得電力系統的穩定運行點變化較大,如果不及時調整PID的控制參數,將會出現頻率控制效果一般、影響系統穩定運行等問題.
此外,新能源的大規模接入使電力系統逐漸向低阻尼、低慣量方向發展,系統的調頻能力有所減弱,而且傳統火力發電機的調節速度具有一定滯后性,對互聯電網的動態穩定產生影響.儲能裝置因響應速度快、可雙向調節、布局靈活等優點可以有效彌補火電機組調頻性能的不足,因此可配置儲能裝置為電力系統的頻率調整提供功率支撐.文獻[18]針對高風電滲透率下電力系統的頻率波動問題,提出基于動態任務系數的儲能輔助風電參與一次調頻的控制策略,但是在高風電比例的電力系統中,僅依靠儲能調節系統頻率,會增加儲能所需的容量.文獻[19]提出按照儲能的容量,與火電機組按比例共同承擔系統的頻率調整任務,但是沒有考慮儲能參與調頻的過程中容量的動態變化情況.對于儲能裝置的控制,文獻[20]提出將區域控制偏差及其變化率作為模糊控制器的輸入量,采用模糊算法控制儲能參與輔助調頻,但是模糊規則的制定復雜且需要一定經驗.分數階理論和傳統PID控制器的結合使傳統PID控制器具有更好的動態性能和魯棒性.文獻[21]利用分數階PID控制有效抑制了永磁同步電機交流伺服系統的位置擾動.文獻[22]通過分數階PID算法有效提高了列車的速度控制性能,滿足了運行控制系統的控制精度和魯棒性要求.
本文基于含風電、汽輪發電機和儲能裝置的時滯兩區域互聯電網模型,提出了計及儲能調節的時滯互聯電力系統頻率控制策略.汽輪發電機和儲能裝置分別承擔區域控制偏差(ACE)不同區間的調頻任務.為了提高汽輪發電機的調頻性能,在考慮通信延時的情況下,以系統的頻率偏差為目標函數,通過改進粒子群算法優化PID負荷控制器的比例、積分、微分參數,用于控制汽輪發電機的運行.利用儲能裝置參與系統的輔助調頻,通過分數階PID控制器對儲能裝置的輸出功率進行控制,平衡源荷間的功率波動,進一步優化系統的頻率.最后在MATLAB/Simulink平臺上驗證了所提協調控制策略的有效性.
1 系統模型的建立
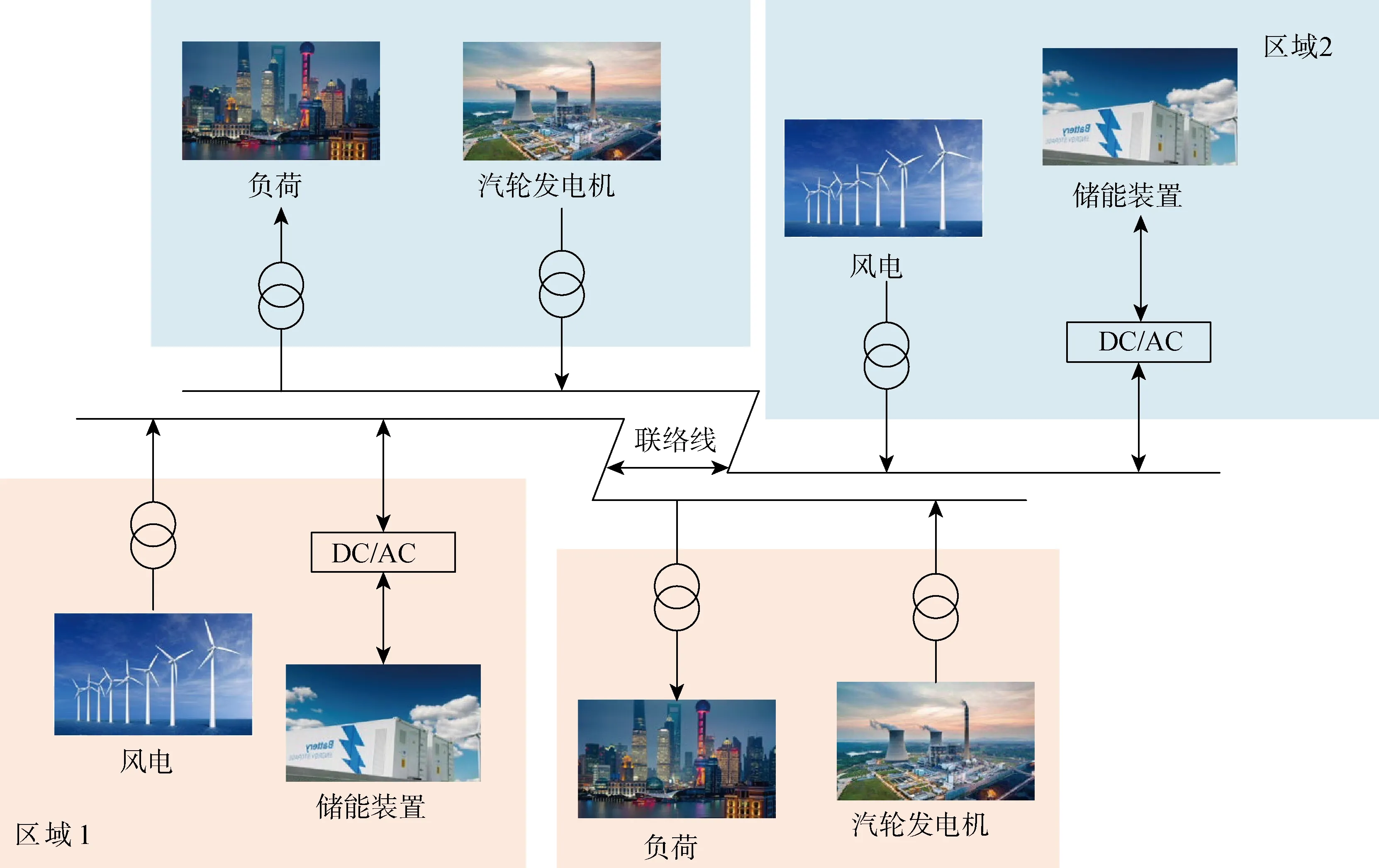
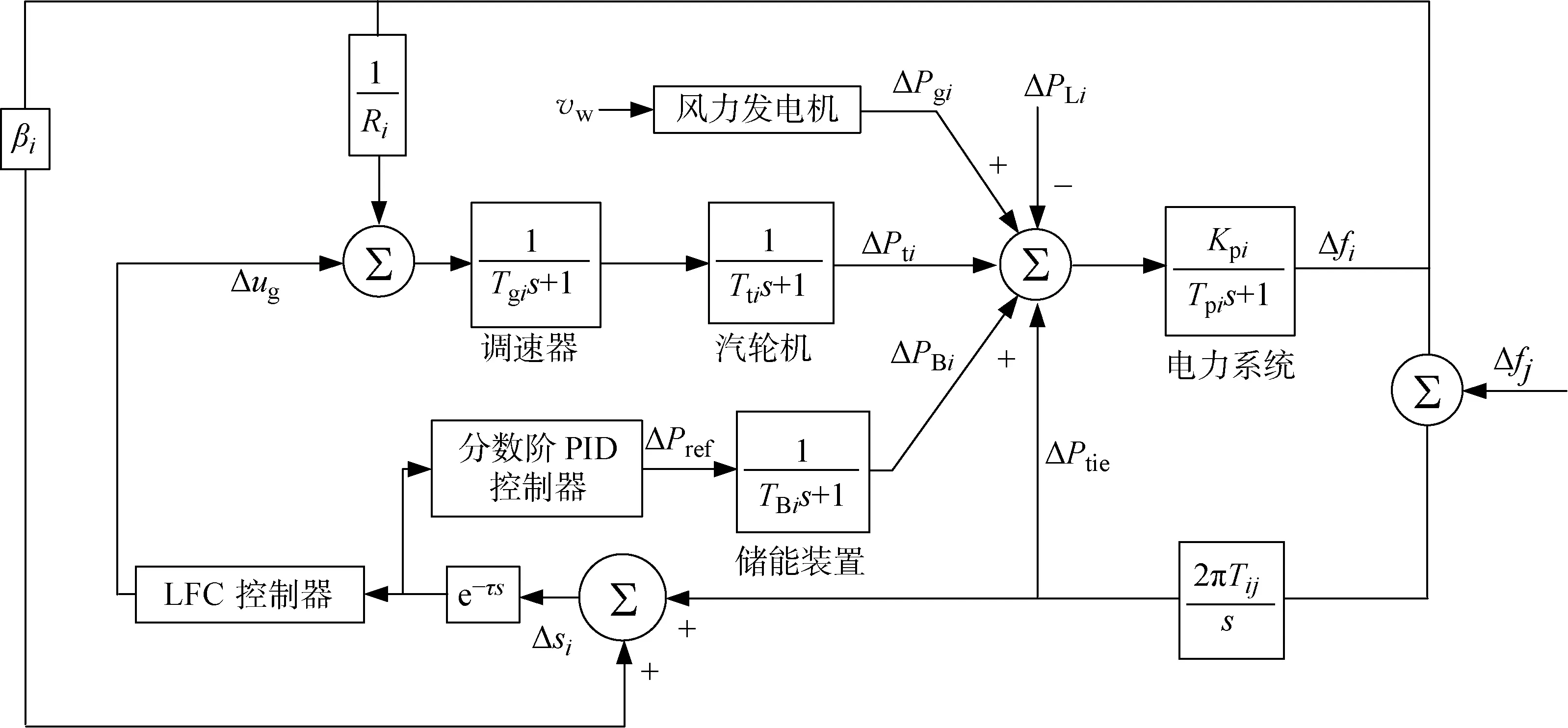
以計及時滯的兩區域互聯電力系統模型為例進行研究,其中包含汽輪發電機和風機等單元,并在兩個區域中分別配置了儲能裝置,不同區域間可通過聯絡線實現功率交互,系統整體結構如圖1所示.
1.1 儲能裝置模型
儲能裝置可以通過其變換器實現與電網功率的雙向調節,保證電力系統的實時功率平衡,在參與電網的輔助調頻時,跟蹤控制信號進行充放電的過程需要一定的響應時間.為了便于分析,同時考慮到儲能系統的靜態特性,引入時滯環節,儲能裝置的等效模型可以用一階慣性環節表示,設儲能裝置域的傳遞函數為
(1)
式中:為儲能裝置的時間常數.
近些年來,玉米種植區玉米粗縮病發病面積一直上升,危害逐年加重,成為玉米生產的主要病害之一。通過近些年對玉米粗縮病發生的影響因素做了分析,了解了玉米粗縮病的發生原因,并找到了防治該病的有效措施。
1.2 風機模型
朋友琳暑假在一個夏令營兼職,學員都是十歲左右的孩子,營地心理老師和孩子們曾開了一個小型座談會,主題是你認為什么是最好的家庭教育。

(2)
式中:為調速器的時間常數;為汽輪機的時間常數.

(3)

由于風力發電機與風力渦輪機相連時風機的慣性遠大于發電機,所以忽略發電機的暫態過程,風電的輸出功率可表示為

(4)
式中:為相電壓;?=(-)為風力發電機的轉差率,ω為風力機轉子的角速度,為同步角速度;為轉子電阻;為定子電阻;為定子電抗;為轉子電抗.
1.3 汽輪發電機模型
為了充分發揮儲能裝置的輔助調頻性能,采用分數階PID控制器輸出儲能裝置的功率參考信號,通過其對儲能裝置變換器的控制,可實現儲能裝置按調頻要求輸出有功功率.不同于傳統PID控制,分數階PID控制器本質是具有額外自由度的非整數積分微分,可以比傳統PID控制器獲得更優的動態性能和魯棒性.分數階PID的傳遞函數為
(5)
(6)
式中:為空氣密度;為風力發電機的葉片半徑;(,)為風能利用系數, 是葉尖速比和俯仰角的函數;為風速.其中,(,)可以表示為
論文針對“機械工程測試技術”課程多媒體教學資源的建設進行研究,總結和歸納了本課程在實際教學過程中的多媒體教學資源制作軟件和方法。通過改進傳統教學資源,旨在增強教學的靈活性和生動性,提升學生學習興趣和積極性,讓學生更為直觀地理解和掌握課程知識點。
1.4 含風儲互聯電力系統的負荷頻率控制模型
電力系統具有高度的非線性特征,但在穩定運行時,系統的擾動很小,因此可以在穩定運行點附近對系統進行線性化處理.以計及時滯的兩區域互聯電力系統負荷頻率控制(LFC)模型為例進行研究,兩區域互聯電網中區域的數學模型如圖2所示.圖中:為系統頻率偏差系數;為機組的調差系數;Δg為風電的功率輸出變化量;ΔL為系統的負荷變化量;Δ為LFC控制器的輸出信號;g為調速器的時間常數;t為汽輪機的時間常數;B為儲能裝置的時間常數;Δt為汽輪發電機的輸出功率變化量;p為電力系統增益系數;p為電力系統時間常數;Δ和Δ分別為區域和的頻率偏差,=1, 2,=1, 2且≠;Δ為儲能裝置的功率參考信號;ΔB為儲能裝置的功率輸出;Δ為聯絡線功率偏差;為系統延遲時間; Δ為區域控制偏差信號的變化量;為兩區域間的聯絡線功率系數.區域中功率和頻率的關系為
(3)對鋼軌進行打磨。波磨出現后,會反過來激化和加劇輪對黏滑振動,促進波磨進一步發展,波深越大則波磨發展越快,構成惡性循環。鋼軌打磨中斷了這種惡性循環的發展過程,減緩了波磨發展速率。

Δg-ΔL+Δ)
(7)
區域控制偏差信號的變化量為
Δ=Δ+Δ
(8)
2 頻率控制策略
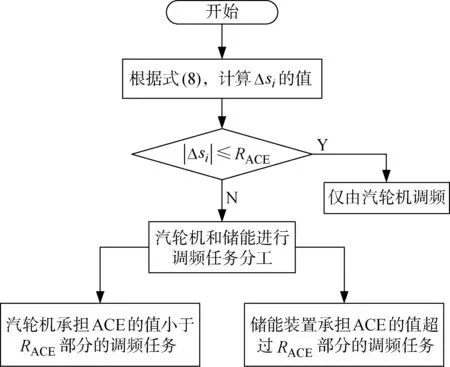
由于汽輪發電機響應速度和調節精度的限制,當系統頻率變化時,若單獨使用汽輪發電機參與調頻,難以達到預期的頻率調整效果,所以可利用儲能裝置協助汽輪發電機參與系統的輔助調頻.為了更好地發揮兩者的調頻性能,本文根據系統的調頻要求對汽輪發電機和儲能裝置的調頻任務進行分工.根據ACE的變化范圍劃分汽輪發電機和儲能裝置的工作區間,定義為儲能裝置協助汽輪發電機參與輔助調頻時ACE的參考值,當|Δ|≤時,系統的區域控制偏差變化較小,此時,僅由汽輪發電機承擔系統的調頻任務;當|Δ|>時,系統的區域控制偏差變化較大,此時將儲能裝置接入系統,輔助汽輪發電機共同參與頻率調整.具體分工過程如圖3所示.
2.1 基于改進粒子群算法優化的負荷頻率控制器設計
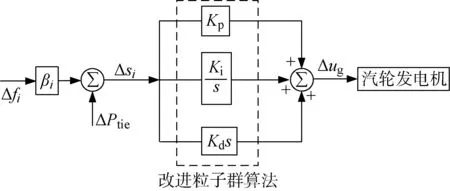
汽輪發電機的二次調頻通常由傳統PID控制器根據設定的運行點進行調整,為了在系統運行狀態發生變化時,及時調整負荷頻率控制器的參數,克服手動調節參數的不確定性以及降低負荷頻率控制器設計的復雜性.本文通過改進的粒子群算法優化PID負荷頻率控制器的比例()、積分()及微分()系數,使系統始終工作在穩定運行點,從而滿足頻率穩定的要求.所設計的基于改進粒子群優化的負荷頻率控制器如圖4所示.
第一,科技法律直接促進科技的發展。從世界范圍來看,為了促進本國的科技發展,各國均會制定科技方面的法律,直接保障科技的發展。以美國為例,美國特別關注科技法律的制定和完善,并通過科技法律促進了本國科學技術發展。
時滯情況下以減小系統的頻率偏差為優化目標,將、、作為粒子的3個維度,粒子在第+1次迭代時速度和位置按下式進行更新:
(9)
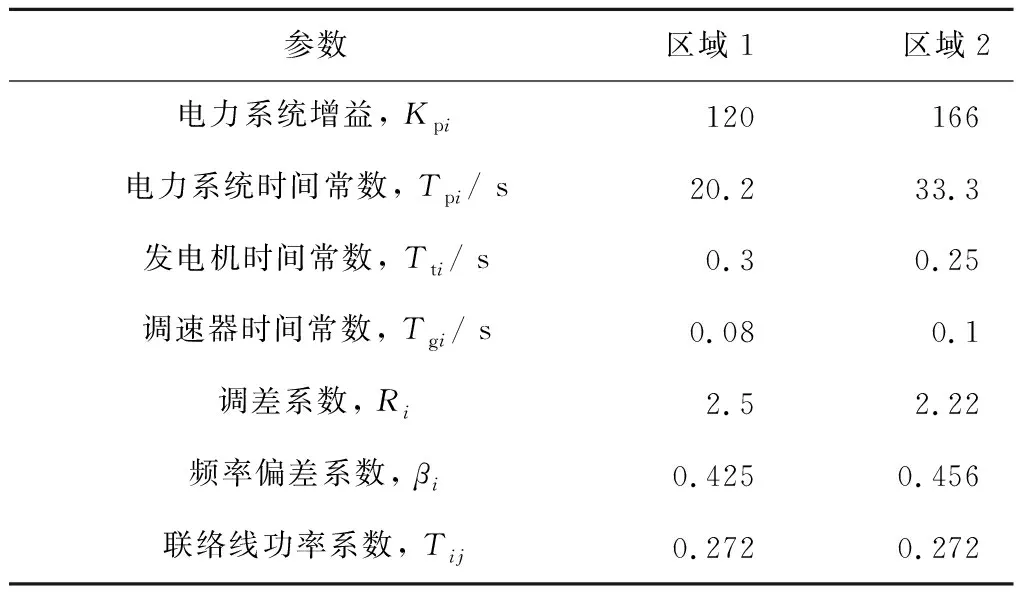
在MATLAB/Simulink平臺上建立含儲能裝置、風機并計及延時的兩區域互聯電網模型,兩區域互聯電力系統的仿真參數選取如表1所示.
為防止粒子群在迭代過程中陷入局部最優解,本文對基本粒子群的慣性權重、個體學習因子1和群體學習因子2進行動態調整在粒子群搜索的初期階段,希望待優化的參數、、有較強的自我學習能力進行大范圍的全局搜索,因此希望和1的值較大而2的值較小隨著迭代次數的增加,為了提高算法的搜索精度,希望和1的值較小而2的值較大,使粒子群向全局最優方向搜索因此,將和1設置為隨迭代次數遞減的函數,而將2設置為隨迭代次數遞增的函數:
網格狀帶齒加筋砂墊層界面特性的細觀機理分析···············張 駿 林永亮 (1,118)
(10)
式中:為最大迭代次數;和分別為慣性權重的最大值和最小值.
經過對比發現,單獨外筒模型數值模擬結果比整體模型的數值模擬結果稍大,這是由于單獨外筒模型荷載加載方式、荷載數據大小和模型處理采用了簡化的處理方法,故而采用該結果計算煙囪結構會更加趨于安全。
為了在時滯條件下獲得最佳的負荷頻率控制性能,選擇目標函數為

(11)
s.t. 001≤≤025
采用與上述相同的步驟可以從圖6中得到公式(6)。圖中存在兩條從SeiSf0到De0Dfi的不相交雙向因果路徑,因此該模型是可逆的,由此可得:
010≤≤150
001≤≤020
在唐朝以前的東南海上通道——海上絲綢之路,就已經存在并有一定的發展。自中唐以來,由于中國經濟重心向南方轉移,加上造船技術水平的提高和新航線的不斷開辟,這條海上絲綢之路開始繁榮起來,并逐漸替代了陸上絲綢之路的地位,成為中國開展對外商貿交往和人員往來的最重要通道。根據史料記載和考古發現,從宋朝開始,一直到清代,都有中國錢幣通過這條通道持續流向東亞的日本和朝鮮,東南亞的越南、柬埔寨、泰國、新加坡、印度尼西亞、文萊等地。
根據式(11)所構造的目標函數,利用改進粒子群算法對其進行優化以獲得最優的控制器參數值.具體優化步驟如下:首先根據系統的延遲時間初始化系統參數,并生成滿足式(11)中約束條件的隨機數;接著將滿足條件的隨機數代入到目標函數中,通過不斷迭代尋找滿足要求的最優值.
通過3個案例驗證所提頻率協調控制策略的有效性:案例1分析了不同時滯對系統頻率穩定的影響;案例2驗證了不同時滯條件下,本文所設計的改進粒子群優化PID(MPSO-PID)負荷頻率控制器的頻率穩定效果,將所設計的MPSO-PID負荷頻率控制器分別與傳統PID、模糊PID和粒子群優化PID(PSO-PID)負荷頻率控制器進行對比;在案例3中對本文所設計的儲能裝置參與系統調頻的方案進行了驗證.最后,在案例4中將本文所提頻率控制方式與兩種不同頻率控制方式進行對比,驗證了所提頻率控制方式的效果.其中,方式1為儲能和汽輪發電機按比例響應ACE信號的頻率控制方式;方式2為MPSO-PID控制汽輪發電機的同時,由傳統PID控制儲能的頻率控制方式.
2.2 儲能裝置的分數階PID控制
本文所采用的汽輪發電機主要包括調速器和汽輪機兩部分,其中調速器通過控制汽門的開度進而控制汽輪機的輸出功率,調速器和汽輪機的傳遞函數分別為
(12)
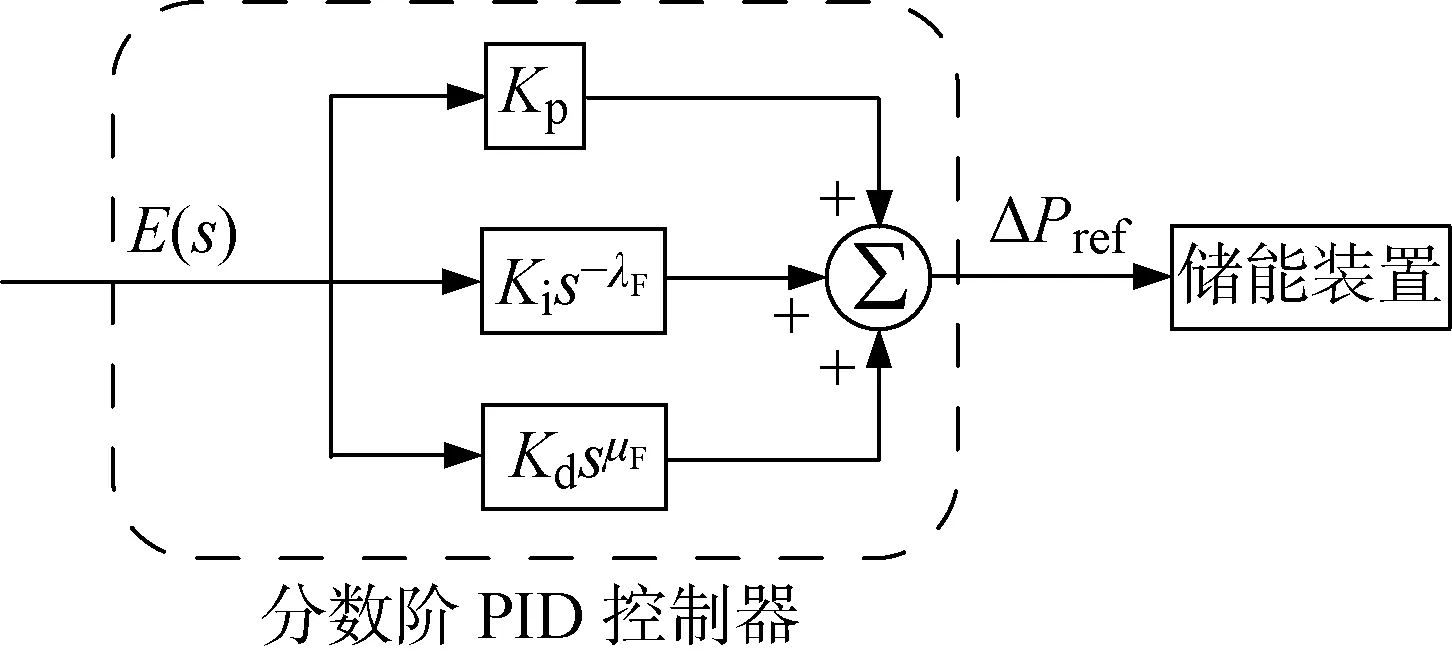
式中:和分別為控制器積分項和微分項的系數.根據ACE的變化,分數階PID控制儲能裝置參與輔助調頻的框圖如圖5所示.圖中,()為區域控制偏差信號在域下的控制器輸入量,ACE信號經過分數階PID控制器轉換為儲能裝置的功率參考信號Δ,通過對儲能裝置輸出功率的控制,實現對系統頻率的優化.
對于分數階類非線性系統,為了在實際應用中實現分數階行為,需要采用整數階控制方法,一般通過近似離散化方法實現.常用的擬合方法為Oustaloup方法.Oustaloup分數階算子的實現方法是使用零極點傳遞函數在頻域中逼近分數階算子.在擬合頻段[,]內,以下公式提供了極點和零點的分布:
風能的特點是隨天氣的變化而變化,根據空氣動力學原理,風力渦輪機捕獲的風能與風速的3次方成正比,其輸出的機械功率可以表示為
(13)
(14)
(15)
(16)

3 仿真驗證
式中:()、()和分別為第次迭代時粒子的速度、位置以及慣性權重;1和2分別為第次迭代時的個體學習因子和群體學習因子;和分別為區間[0, 1]上均勻分布的隨機數;()和()分別為第次迭代時的個體最優值和群體最優值.
我國社會主義和諧社會建設的偉大實踐,既向思想政治教育學科建設與發展提出要求,也為高校思想政治教育學科建設與發展提供了基礎。要有效解決當前高校思想政治教育所面臨的重大理論與實際問題,提高師生思想政治教育水平,發揮思想政治教育在科教興國、人才強國中的作用,必須加強思想政治教育學科建設的創新。高校思想政治教育學科建設的主要目標是通過建立和發展思想政治教育學科,科學揭示思想政治教育實踐的本質和基本規律,用正確理論指導思想政治教育的實踐。其要解決的核心問題是實現思想政治教育由實踐形態向理論形態、由經驗形態向學科形態、由學科形態向科學形態的轉變。
3.1 案例1
為驗證時滯對系統的影響,僅考慮汽輪發電機參與系統的頻率調整,并采用傳統的PID控制方式,以分析不同延遲時間對電力系統頻率穩定的影響.假設系統在時間=10 s時發生標幺值(p.u.)為0.1的階躍擾動,延遲時間=0.2,0.35,0.5 s時各區域的頻率偏差如圖6所示.
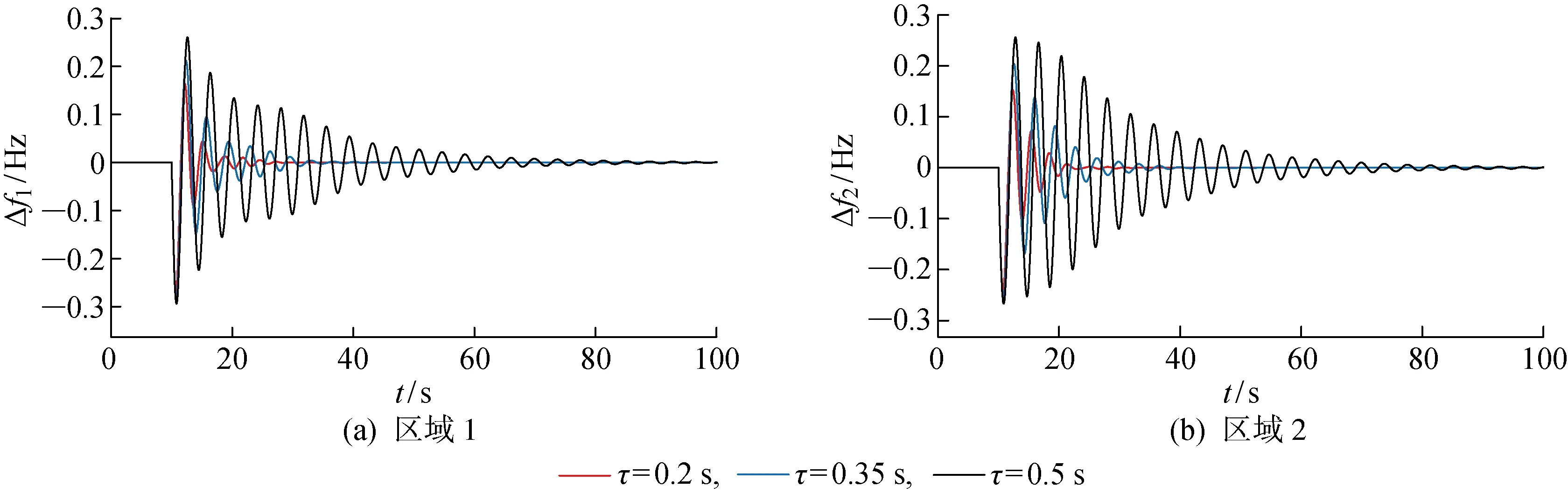
仿真結果表明,在同樣的控制參數下,當=0.2 s時,系統頻率大約經過25 s可以恢復穩定;當增加到0.35 s時,系統頻率大約經過35 s可以達到穩定;而=0.5 s時,系統頻率恢復穩定所需要的時間將近90 s.通過對比可以發現:系統的延遲時間越長,則系統的頻率偏差越大,且恢復頻率穩定所需的時間也更長.時滯不僅會影響系統的頻率穩定,而且較長的時滯甚至會破壞系統的穩定運行.在系統運行狀態發生變化時,如果不及時調整負荷頻率控制器的參數,將會影響系統的穩定運行.
綜上所述,在治療盆腔炎的時候利用左氧氟沙星和物理方法聯合治療可以有效的提高臨床治療效果,改善患者的血液循環,促進患者身體恢復。
3.2 案例2
本案例驗證了本文所設計的MPSO-PID負荷頻率控制器在系統時滯情況下的頻率控制效果.在僅考慮汽輪發電機參與調頻的情況下,假定區域1和區域2在=10 s時受到標幺值為0.1的階躍擾動,對比了分別為0.2、0.5 s時不同負荷頻率控制器的調頻效果,仿真結果如圖7、8所示.
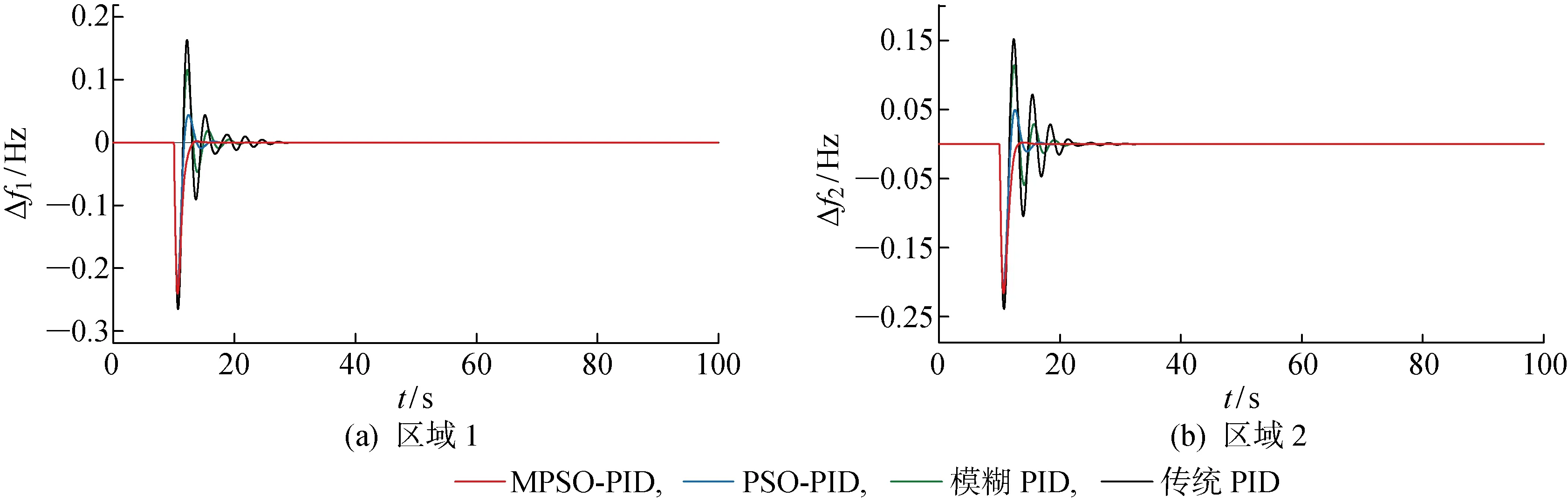
從圖7、8中的仿真結果可以發現,本文所提MPSO-PID負荷頻率控制器大約經過15 s便可恢復系統的頻率穩定,相比于模糊PID負荷頻率控制器和傳統PID負荷頻率控制器,所提MPSO-PID控制系統恢復穩定所需的時間更短.=0.5 s時,所設計的改進粒子群優化PID負荷頻率控制器恢復頻率穩定所需的時間僅為15 s,而傳統PID控制下頻率恢復穩定所需的時間為90 s.另外,本文設計的MPSO-PID和PSO-PID相比,其系統頻率穩定效果也有所改善,由此說明本文所提出的改進粒子群算法的有效性.通過圖7和8的對比可以清楚地得出結論:基于改進粒子群優化的PID的負荷頻率控制器可以在時滯條件下有效發揮汽輪發電機的調頻性能,減小系統的頻率偏差,并使系統的頻率快速恢復穩定.
3.3 案例3
為驗證儲能參與輔助調頻的必要性,在本案例中對比MPSO-PID負荷頻率控制方法在系統有、無儲能情況下的頻率偏差情況.其中,區域1受到隨機負荷擾動和風電功率波動的影響,區域2則受到連續階躍擾動的影響,分別為0.2和0.5 s時有、無儲能參與輔助調頻時的仿真結果如圖9、10所示.
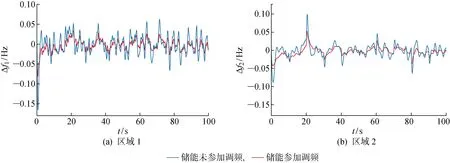
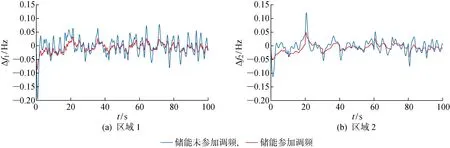
當=0.2 s時,儲能參與輔助調頻的系統,區域1和區域2的最大頻率偏差分別為0.081和0.053 Hz;而儲能未參加輔助調頻的系統,區域1和區域2的最大頻率偏差分別為0.166和0.099 Hz.通過對比可以發現,相比于儲能未參加輔助調頻的系統,儲能參加輔助調頻的系統頻率偏差減小了約50%.=0.5 s時,儲能參與輔助調頻的系統,區域1和區域2的最大頻率偏差分別為0.088以及 0.05 Hz;而儲能未參加輔助調頻的系統,區域1和區域2的最大頻率偏差分別為0.196和0.12 Hz.整體對比可以發現,儲能裝置可以通過改變其功率輸出,平滑源荷間的功率不平衡,使系統頻率偏差減小,因此儲能系統參與輔助調頻有利于系統頻率的穩定.
3.4 案例4
為了驗證在有儲能參與調頻的情況下,所提頻率控制方式的頻率調整效果,將所提頻率控制方式分別與頻率控制方式1、2進行對比.假設區域1受到隨機負荷擾動和風電功率波動的影響,區域2受到連續階躍擾動的影響,不同延遲時間下3種頻率控制方式的仿真結果如圖11、12所示.
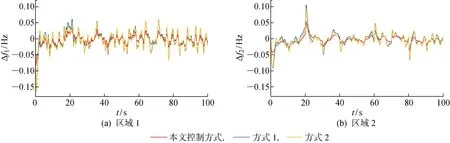
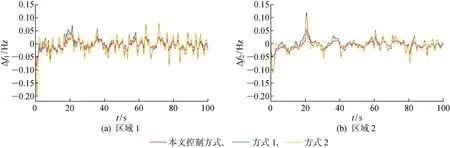
圖11和圖12分別對比了為0.2 s和0.5+0.2 sin時不同控制方式下的頻率偏差情況.=0.2 s時,本文頻率控制方式下區域1和區域2的最大頻率偏差分別為0.081和0.053 Hz;頻率控制方式1下,區域1和區域2的最大頻率偏差分別為0.16 和0.11 Hz;頻率控制方式2下,區域1和區域2的最大頻率偏差分別為0.167和0.095 Hz.當=0.5+0.2sin時,本文的頻率控制方式下區域1和區域2的最大頻率偏差分別為0.088和0.049 Hz;而頻率控制方式1下,區域1和區域2的最大頻率偏差分別為0.185和0.12 Hz;頻率控制方式2下,區域1和區域2的最大頻率偏差分別為0.198和0.11 Hz.通過整體對比分析發現,同樣是有儲能參與輔助調頻的系統,相比于頻率控制方式1和2,本文所提頻率控制方式下系統的頻率變化更穩定,更有利于系統的穩定運行.
4 結論
新能源功率波動以及系統延時對頻率穩定產生影響,僅依靠汽輪發電機進行頻率調整并不能滿足電能質量的要求,對此研究了儲能裝置協調汽輪發電機參與系統頻率控制的策略,主要結論如下:
(1) 根據ACE的變化范圍對汽輪發電機和儲能裝置進行調頻任務的分工,以更好地發揮兩者的調頻性能.
數學是人類對客觀世界的抽象,可以說沒有數學,就沒有人類文明,人類文明源于計數,經歷了進制、比例、幾何、圖形、空間、變量、函數、高數等數學形式,專業化程度越來越高,學科體系越來越龐大,高職高數要想有所突破,必須打破傳統教育的弊端,建立和專業結合的課程體系。
(2) 針對互聯電網的通信延時以及新能源接入引起的頻率波動等問題,設計基于改進粒子群參數優化的PID負荷頻率控制器,可以在系統時滯情況下有效地發揮汽輪發電機的調頻性能,抑制電網的頻率波動.
(3) 利用儲能裝置響應速度快的特點為互聯電網提供頻率支撐,采用分數階PID控制器對儲能裝置的輸出功率進行控制,使其平衡源荷間的功率波動,進一步優化系統頻率.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44