北斗導航定位系統(BDS)下地殼運動監測精度分析
2022-10-03 12:08:46劉洋洋邵銀星
地震地磁觀測與研究 2022年3期
關鍵詞:系統
劉洋洋 李 瑜 邵銀星 祝 杰
(中國北京 100045 中國地震臺網中心)
0 引言
20 世紀80 年代以來,以美國全球定位系統(GPS)為代表的衛星導航系統迅速發展,隨著定位精度的大幅度提升,衛星導航系統被廣泛應用于地球動力學相關領域,為監測區域性、全球性的地殼運動提供了精確的量化數值指標。目前GPS 監測板塊運動和地殼形變的精度為:水平方向1—2 mm/a,垂向2—4 mm/a。我國自主研發的北斗導航定位系統(BDS)歷經3 個階段:北斗一代為實驗驗證系統,共布置4 顆衛星,具備區域定位能力;二代共布置20 顆衛星,2012 年組網,具備亞太地區定位能力;三代共布置35 顆衛星,2020 年底完成組網,具備全球定位能力。本研究利用北斗二代數據進行解算。北斗二代系統精密單點定位(Precise Point Positioning,PPP)精度為水平向8 mm、垂向20 mm。及時開展BDS 在監測板塊運動、地殼形變領域的研究非常有必要,而借鑒GPS 的研究成果,能更好的比對BDS 的監測精度,同時進一步推動BDS 在防震減災工作中的應用。
國內外學者在BDS 系統定軌、定位等方面做了大量研究探索,如:施闖等(2012)利用PANDA 軟件,解算“北斗衛星觀測試驗網”數據,表明BDS 的PPP 精度達到cm 級;Li等(2014)開展了BDS、GPS 融合定位研究,發現在系統融合情況下,能夠減少BDS-PPP收斂時間,且定位精度達到cm 級;朱永興等(2015)等研究了北斗系統靜態、動態PPP 精度;Geng 等(2016)的研究顯示,BDS、GPS 融合定位在獲取地表強震運動速度能力方面較單獨的GPS 動態定位有所提升;張彩紅等(2015)對Bernese 進行二次開發并解算北斗數據,表明BDS-PPP 和GPS-PPP 精度存在cm 級差異;王廣興等(2016)利用陸態網絡站分析了北斗衛星觀測值的相關特性;王閱兵等(2018)分析了BDS-PPP 在地殼運動監測中的應用,驗證了BDS 用于監測形變量較大區域性地殼運動的可行性;李良發等(2020)、王坦等(2021)利用GAMIT 解算了部分陸態網絡北斗站點,結果顯示BDS 靜態相對定位在水平方向上滿足亞cm 級監測需求,垂向滿足cm 級監測需求;任靜等(2020,2021)為未來適時開展BDS 在地震預警及烈度研究領域的應用提供了借鑒。
以上研究進展多集中在BDS 定位、定軌精度分析,缺少對BDS 定位及地殼運動應用的系統的定量研究,以及綜合不同指標對BDS 與GPS 精度差異的定量考量,指標包括三維坐標解、時間序列及速度場,且BDS 在地殼監測領域的應用成果相對較少,現有成果待完善。故以川滇地區為研究區,以中國大陸構造環境監測網絡(陸態網絡)北斗站(北斗二代信號)記錄數據進行區域地殼運動監測研究,分析評估BDS、GPS 精度差異,分析BDS 在地震地殼運動監測中的精度,并與GPS 監測地殼運動精度對比。
1 數據選取與解算設置
以川滇地區為研究區域利用陸態網絡2018—2019 年的觀測數據,對GPS、BDS 數據進行單獨處理,并分別平差得到位置解、時間序列、速度場模型等結果,分析BDS 精度及與GPS 的差異。測站包括陸態網絡站點(SCDF、SCGU、SCGZ、SCJU、SCYY、YNHZ、YNLC、YNMJ、YNRL、YNSD、YNSM、YNXP、YNYA、YNYL、YNYS、YNZD)及中國大陸周邊IGS、MGEX 站(USUD、ULAB、URUM、TSKB、STK2、TSK2、SUWN、SHAO、POL2、MIZU、HKSL、JOG2、KARR、TWTF、JFNG、WUH2、LHAZ、HYDE、GMSD、CCJ2、CHAN、BADG、AIRA)。
利用GAMIT 10.71 版本,處理陸態網站基準站的BDS 和GPS 觀測數據,其中,解算采用相同模型及參數,參數設置見表1。

表1 解算參數設置Table 1 Parameter settings of solution
2 結果對比
2.1 測站坐標解
對BDS、GPS 數據分別進行解算,選擇同一坐標系,合并全球H 文件(H 文件是全球共享GNSS 站點的平差文件,文中選取區域性站點,將全球H 文件在平差過程中加入,得到站點在全球坐標系下的坐標結果)平差,得到各測站在BDS、GPS 數據解算方案下的三維坐標結果及精度。提取2 種方案的單方向均方根值(Root Mean Square,RMS),結果見表2。RMS 值越小,代表數據精度越高。
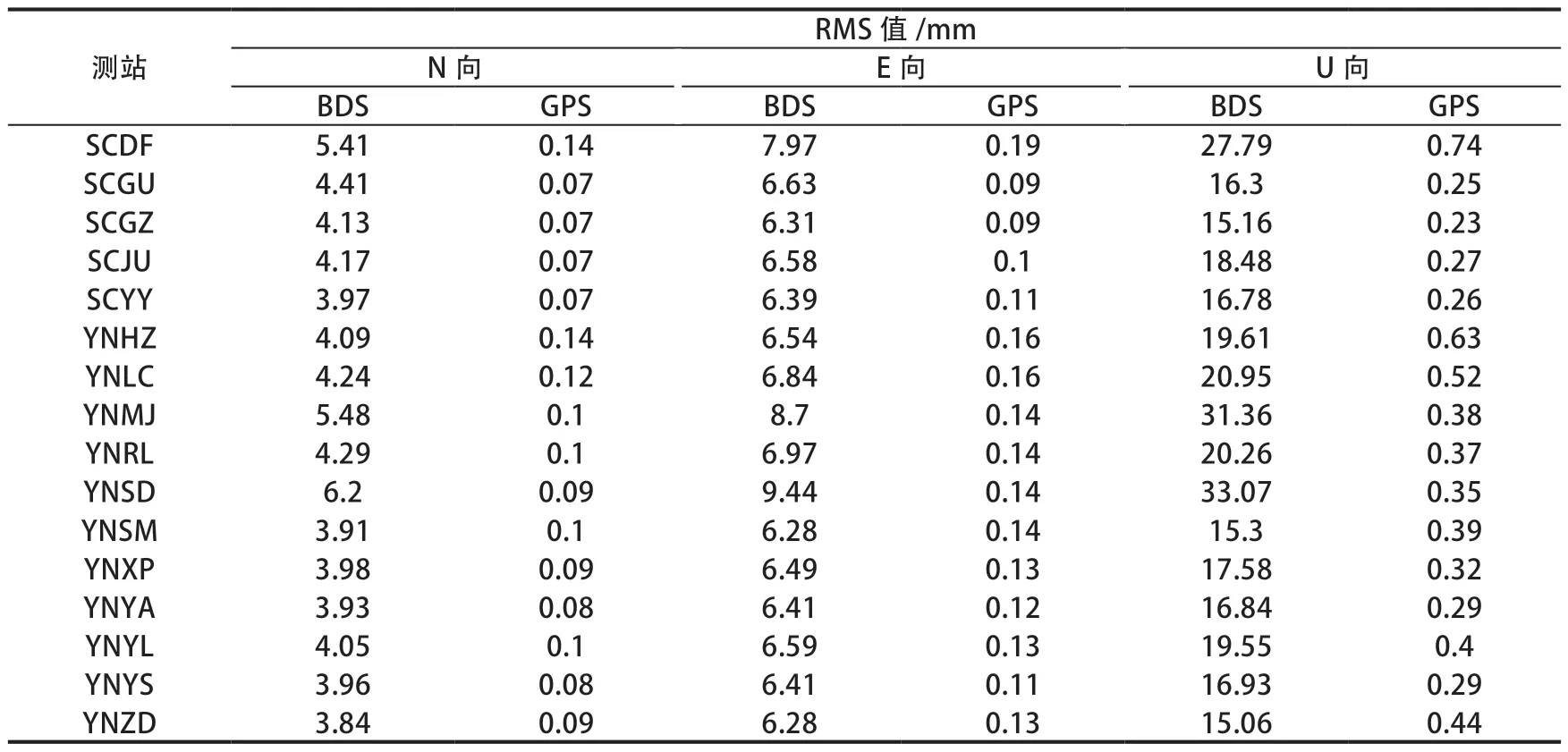
表2 坐標RMS 值對比Table 2 Coordinate RMS value comparison
由表2 可見,2 種系統解算結果相差較為明顯,GPS 解算結果的水平向(N 向、E 向)和垂向(U 向)精度均在mm 級,而BDS 解算結果精度則分別在mm 級、cm 級。在BDS、GPS 系統下,全部測站N 向精度均值分別為4.38 mm、0.1 mm,E 向精度均值分別為6.9 mm、0.2 mm,U 向精度均值分別為20 mm、0.4 mm,U 向精度相差最為明顯。就定位精度而言,GPS 優于BDS,但BDS 系統下解算的各測站位置精度相差不明顯,間接說明BDS 解算結果的穩定性。在靜態測量中,BDS 二代系統也可以滿足水平方向mm 級定位的精度要求。
2.2 時間序列
對2018—2019 年的解算結果進行時間序列分析,其中站點位置來源于同一坐標系。以云南施甸站(YNSD)為例,基于BDS、GPS 數據(未經濾波的原始數據)解算的時間序列見圖1。
由圖1 可見,2 系統均具有大趨勢變化下不同程度的跳躍,BDS 結果更分散,趨勢一致性較弱。雖然BDS 解算結果在個別時間存在較大變化(已在時間序列中剔除),但總體精度尚佳。以加權均方根誤差(weighted root mean square,WRMS)為例,該站點GPS 結果的N、E、U 向WRMS 值分別為3.7 mm、9.2 mm、16.9 mm,BDS 結果的N、E、U 向WRMS 值分別為5.5 mm、8.3 mm、22.2 mm,二者水平向差異較小,垂向差異也在mm 級。簡言之,BDS 系統可用于對精度要求不甚高的區域進行監測。
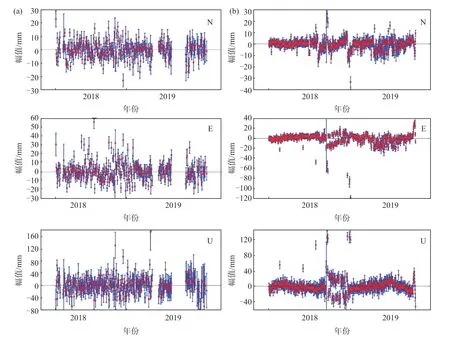
圖1 BDS(a)、GPS(b)數據解算的云南施甸站(YNSD)時間序列Fig.1 Time series of YNSD calculated by BDS (a) and GPS (b) data
2.3 速度場模型
通過時間序列文件,得到所選站點在BDS、GPS下ITRF2014框架的速度場結果,見圖2。
由圖2 可見,BDS、GPS 速度場反映了同一運動趨勢,但運動方位和速度值有所不同。圖2 中各站點所繪直線代表年運動速度值,BDS 數據解算的水平向速度與GPS數據解算結果差值在1—10 mm 內,其中,E 向差值均值為10 mm,N 向差值均值為3 mm,U 向差值均值為16 mm。同時,BDS 反映的運動方位與GPS 存在差異,GPS 結果較BDS 南偏西約18°。
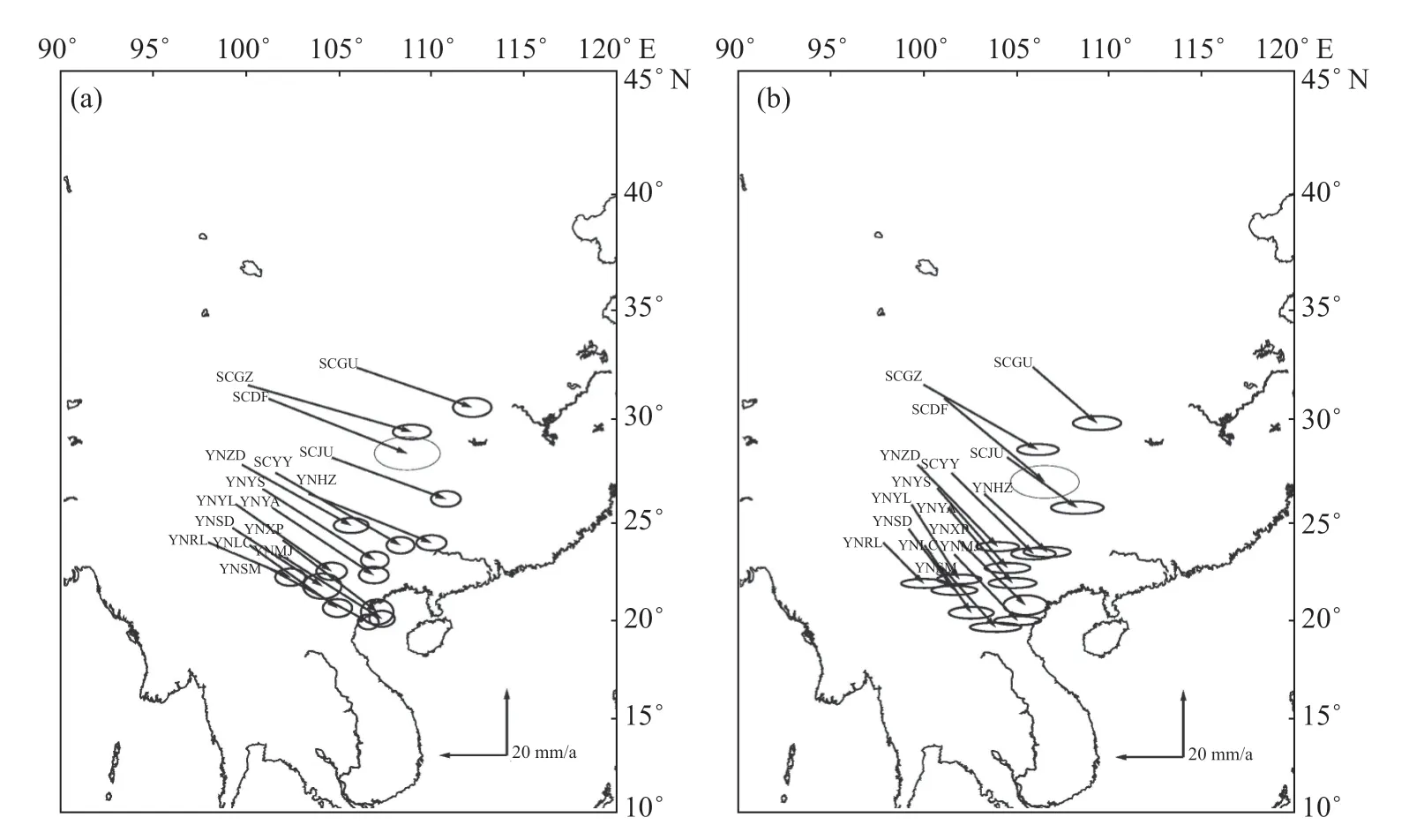
圖2 BDS(a)、GPS(b)解算速度場模型Fig.2 Velocity field model of BDS (a)、GPS (b)
3 結論
利用GAMIT 軟件,對2018—2019 年川滇地區陸態網絡基準站記錄的BDS 和GPS數據進行處理,通過分析三維坐標解、時間序列和速度場結果,對2 套系統下地殼運動監測精度進行定量對比。結果表明:在所選站點范圍內,BDS 數據的解算精度與GPS 相比略有不足,GPS 水平向和垂向精度均在mm 級,而BDS 則分別在mm 級、cm 級,且BDS和GPS 水平速度場結果相差1—10 mm,垂向相差16 mm。總體來看,北斗二代系統仍滿足高精度定位解算的要求,可用于監測形變量較大的區域地殼運動。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32