基于TDLAS技術的機載水汽密度測量儀
2022-09-23 02:03:04郝曉輝賈少龍張志遠
測控技術 2022年9期
郝曉輝,楊 飛,賈少龍,郝 奎,張志遠
(1.航空工業太原航空儀表有限公司,山西 太原 030006;2.山西工程職業學院 機械電子工程系,山西 太原 030009)
水汽在大氣中所占的比例很小,僅0.1%~3%,卻是大氣中最活躍的成分[1],對于空氣中水汽密度的研究具有重要價值。傳統的濕度測量方法有濕度計法、電學法、化學法等[2],這些測量方法在機載環境下較難實現。目前應用最廣泛的濕敏電容式濕度傳感器和冷鏡式露點儀均存在響應時間慢的問題[3],無法滿足機載環境下實時測量的要求。
國外相關研究機構和學者在應用可調諧激光吸收光譜(Tunable Diode Laser Absorption Spectroscopy,TDLAS)技術測量高空水汽密度方面進行了很多的研究,并取得了一系列的研究成果。2007年,美國科羅拉多大學將基于TDLAS技術的低溫露點濕度計應用在球載水汽測量裝置[4]中。2013年,哈佛大學研制了近紅外TDLAS濕度計,搭載到NASA的WB-57飛機上進行濕度測量,用于對中緯度卷云特性進行研究[5]。2013年,德國的Buchholz等[6]研制了基于TDLAS技術的機載濕度測量系統。美國的航空公司已經將SpectraSensor公司的WVSS-Ⅱ水蒸氣傳感器安裝在航空飛機上進行氣象預報。
國內相關機構和作者在應用TDLAS技術測量水汽密度方面也進行了很多的研究。2016年,山東大學研制了基于TDLAS技術的濕度測量儀[7]。2019年,聶偉[8]采用TDLAS技術,在實驗室開展了大動態范圍露點/霜點溫度精確測量方法研究、露點/霜點溫度測量結果溯源研究以及極低溫度環境下露點/霜點測量的環境適應性研究,通過與標準儀器對比,全范圍測量結果小于1 ℃。國內雖在應用TDLAS技術測量濕度有了突破性進展,但尚未將該技術在機載環境下應用。
航空工業太原航空儀表有限公司于2018年研制了機載大氣總含水量測量裝置[9],目前已安裝在人工影響天氣飛機上,用于測量總水含量(固態、液態、氣態)。在該測量裝置的基礎上進行改進,設計了一種滿足機載環境的體積小、響應時間快、測量精度高的水汽密度測量儀。
采用TDLAS技術、激光波長調制技術,通過控制激光器溫度,調制激光器工作電流使激光器輸出的波長在1368.6 nm的吸收譜線附近進行掃描,光電探測器將經過水汽吸收的光信號轉換為電信號,采用二次諧波檢測技術測得二次諧波的幅值,計算得出原始水含量。通過露點發生器產生不同濃度的水汽,分別通過水汽密度測量儀與高精度冷鏡式露點儀,以高精度冷鏡式露點儀為標準對水汽密度測量儀進行全量程標定,得出擬合曲線。之后對標定后的水汽密度測量儀進行了精度和響應時間測試。為了驗證水汽密度測量儀在機載環境下測量的可行性,將該儀器安裝在山西省人影辦的運12人工影響天氣飛機上,進行了飛行試驗。
該項研究填補了國內機載水汽測量裝置的空白,為飛機飛行過程的水汽密度的測量提供了一種可靠的裝置。
1 TDLAS測量的基本原理
根據Beer-Lambert定律[10-12],一束單色激光穿越氣體介質時,其強度變化可以用式(1)來表示。

(1)
式中:It為穿越氣體介質時經過氣體吸收后的激光強度;Io為無氣體吸收時的參考激光強度;P為氣體介質的總壓;S(T)為該氣體特征譜線的線強度,它表示該譜線的吸收強度,只與溫度有關;φ(υ)為線型函數,它表示了被測吸收譜線的形狀,與溫度、總壓力和氣體中的各成分含量有關;X為氣體的體積濃度;L為激光在氣體中傳播的距離;α(υ)為測量中得到的光譜吸收率信號。
φ(υ)線型函數的譜線形狀是以分子躍遷點頻率為中心的呈現出的一種分布狀態,反映了光譜吸收系數隨波長的相對變化情況,線型函數在吸收線的中心有最大值。
在利用TDLAS技術檢測氣體濃度時,最開始采用的是直接吸收光譜技術,該方法簡單,不用標定就可以測得氣體的濃度。直接吸收的檢測方法是通過對比激光的原始光強信號和以頻率或波長為函數采集得到的經過待測氣體的吸收光強信號,再根據測量得到的吸收線的強度和形狀計算得出待測氣體的濃度值[13]。
但是直接吸收光譜技術的檢測靈敏度低,容易受到檢測系統中各種背景噪聲(主要是激光器、光電探測器與電路中所產生的各種噪聲)的影響。直接吸收光譜技術主要是通過控制激光器的波長在氣體分子中心波長附近掃描,從而得到氣體分子的光譜吸收線。但是由于待測氣體分子吸收光譜窄,而且不能長時間地將激光輸出波長穩定在同一范圍內,所以利用直接吸收光譜技術在檢測氣體濃度時的準確度不能保證。
隨著激光技術的不斷發展,激光的調制技術已經足夠成熟,為了提高氣體檢測靈敏度,在直接吸收存在檢測誤差并且檢測靈敏度低的情況下,又出現了波長調制光譜(Wavelength Modulation Spectroscopy,WMS)技術[14]以及頻率調制光譜(Frequency Modulation Spectroscopy,FMS)技術[15]。通過對激光器的直流驅動信號進行交流調制可以在一定程度上消除由系統背景噪聲引起的低頻頻譜。筆者采用了激光的波長調制技術作為研究的技術手段。
使用的光源為可調諧激光二極管,可調諧激光二極管是一種具有窄線寬、波長由溫度和電流進行控制的激光器。將頻率為ω、調制幅度為α的高頻正弦波疊加到頻率為υc的鋸齒波對激光器進行光調制,激光器輸出的光頻率可以用式(2)表示。
υ=υc+αcosωt
(2)
經過長度為L的裝有被測氣體的吸收池后,其透射光強的數學表達式[16-17]如式(3)所示。
I(υ)=Io(υ)exp[-k(υ)LC]
(3)
根據指數ex的性質,當指數∣x∣<<1時,ex≈1+x。
當吸收光譜應用于氣體檢測時,由于濃度C非常小,因此k(υ)LC<<1,可以將I(υ)表示為式(4)。
I(υ)=Io(υ)[1-k(υ)LC]
(4)
吸光度A(υ)與頻率υ的關系為
A(υ)=k(υ)LC
(5)
將吸光度利用余弦傅里葉級數展開為各次諧波分量,如式(6)所示。
(6)
式中:調制頻率角θ=ωt,將式(2)代入式(6),并利用傅里葉級數展開,將得到吸光度的各諧波分量,見式(7)。


(7)
在調制幅度遠小于吸收線時,對上式進行泰勒技術展開得到式(8)。
(8)
由式(8)可知,第n次諧波分量大小與吸收系數k(υ)的n階導數、光程長度L以及被測氣體的濃度C成正比關系[18]。選擇中心對稱且諧波信號最強的二次諧波分量進行檢測。
HITRAN(High-Resolution Transmission Molecular Absorption Database)數據庫是一個包含各種氣體分子光譜參數的數據庫,具有很高的權威性,根據查詢,HITRAN數據庫中H2O分子的吸收譜線圖在波長1368.6 nm時,H2O分子的吸收線強最大。因此選擇波長1368.6 nm作為H2O分子濃度測量的中心波長。
2 系統概述
水汽密度測量儀的系統結構框圖如圖1所示,主要由氣體采集器、進氣管路、出氣管路、吸收池組件、電源板、信號處理板6部分組成。
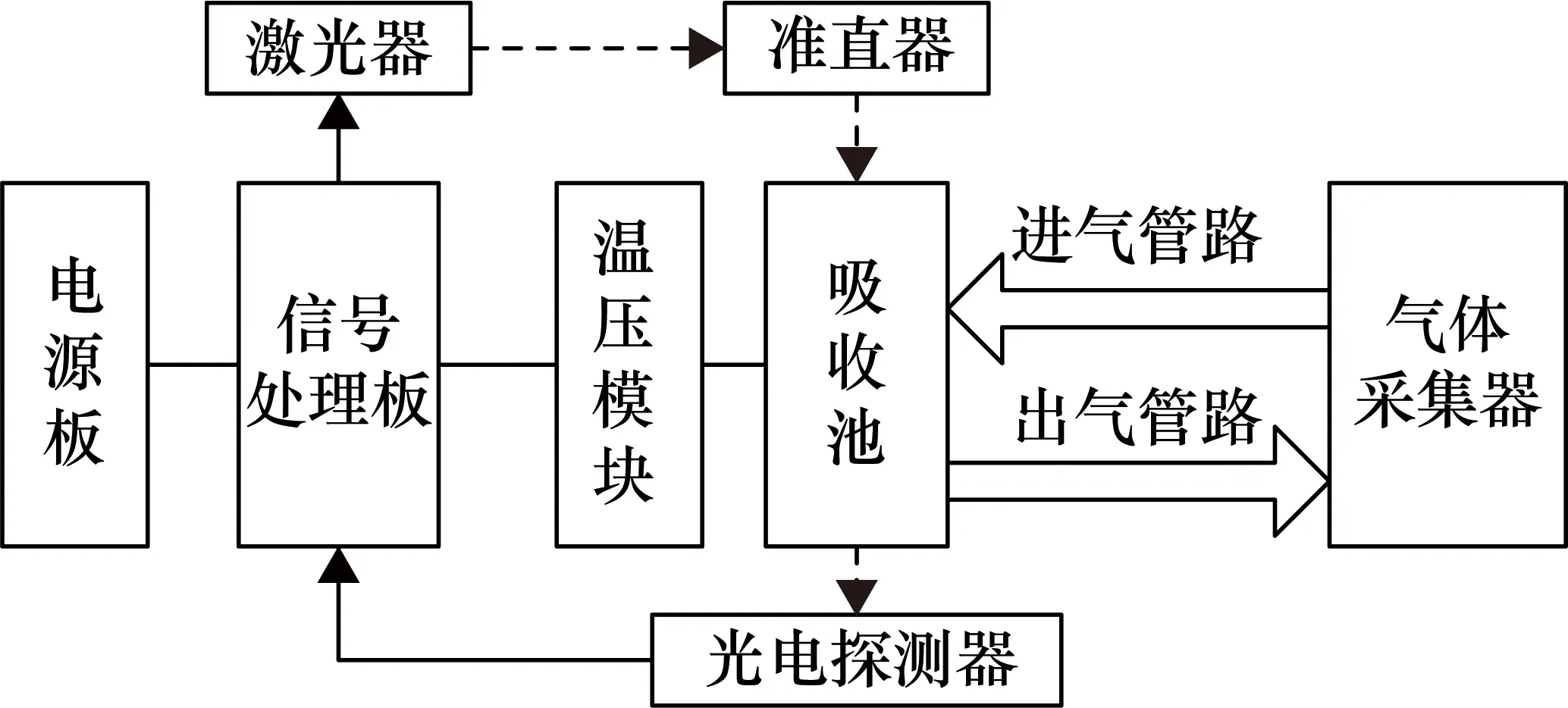
圖1 系統結構框圖
電源板的作用是將機上+28 V直流電源轉換為產品內部需要的各種電壓,并且在進行電壓轉換前,為了應對機載環境下的復雜電磁環境,設計了電源防反接功能、濾除機上電源干擾功能、防機上電源浪涌電壓沖擊功能、防雷功能等,同時在電源板上設計有驅動進氣管路和吸收池加熱的驅動電路。
氣體采集器是用于采集目標氣體的結構裝置,它安裝于飛機側下方的蒙皮處,利用特殊的水氣分離結構,將飛機飛行過程中的水滴、冰晶、雜質等直接通過氣道流出,只將部分目標氣體通過氣體采集器的進氣接頭進入進氣管路中。
水汽遇冷會發生液化現象,為了防止水汽進入吸收池內發生液化變為液態水使得測量到的水汽密度不準確,本系統在進氣管路和吸收池部分設計了加溫與加溫控制功能。在進氣管路中設計加熱絲對管路進行加熱,并在出口處設計PT100鉑電阻溫度傳感器對進入吸收池內的氣體溫度監控,通過PWM(Pulse Width Modulation)調制方式將進氣管路的溫度控制在35 ℃±5 ℃。在吸收池殼體外部設計加熱膜對吸收池殼體進行加熱,并在吸收池內部設計溫壓模塊對吸收池內的氣體溫度進行監控,通過PWM調制方式將吸收池內的溫度控制在40 ℃±2 ℃。該設計保證了水汽密度測量的準確性。
目標氣體通過吸收池進氣接口進入吸收池內,激光器發出的激光經過準直器后發射出去,激光通過吸收池內氣體吸收后,經過吸收后的調制光被光電探測器轉換為電信號后傳輸到信號處理板上進行信號處理。
信號處理板在本系統中的主要作用是驅動激光器工作,對回波信號進行處理和計算。CPLD(Complex Programming Logic Device)在本系統的作用是通過編程產生各種波形。CPLD產生9.5 Hz的鋸齒波、9.8 kHz的基頻正弦波,將鋸齒波和基頻正弦波疊加后生成的12位數字信號送至LTC7541數模轉換芯片,再經電流驅動放大電路驅動激光器工作。激光器的溫度由MAX1968控制,MAX1968可雙象限工作。通過采集激光器熱敏電阻的溫度,控制激光器的加溫或制冷,保持激光器溫度基本穩定。光電探測器輸出的電流信號與激光器的背光探測器電流經過電流自平衡探測電路后去除掉直流分量,再經過I/V變換和放大后得到各次諧波信號。CPLD產生19.6 kHz的正余弦信號作為參考信號,與各次諧波信號通過雙路正交鎖相解調電路相乘得到2次諧波信號的幅值和相位,經低通濾波后由CPU進行A/D采集計算得出原始水含量。為了減小在低量程的誤差,將激光器維持在直流狀態,CPU通過不斷調整2路D/A信號將雙路正交鎖相解調電路的輸出值校準到零位,達到減小低量程誤差的目的。
本系統需要對原始水含量進行全量程標定,選用瑞士MBW公司的973型高精度冷鏡式露點儀作為標定參考,選用湖州唯立儀表廠的WLS-Ⅰ型低溫露點發生器作為露點發生裝置。由露點發生器產生不同濕度的氣體,采用并聯的方式通過本系統和冷鏡式露點儀,對本系統的原始水含量與冷鏡式露點儀測得的水汽密度值進行曲線擬合,最終得出擬合曲線。
3 軟件實現
系統軟件由綜合處理軟件和信號驅動軟件組成。綜合處理軟件是基于ATXMEGA128A3的嵌入式軟件,主要功能包括系統初始化、自檢測(包括上電自檢測、周期自檢測)、靜溫和靜壓數據信號接收、激光器溫度和功率信號采集、進氣管溫度信號采集、吸收池溫度壓力信號采集、進氣管溫控、吸收池溫控、激光器溫控、模擬量信號采集、原始水含量、水汽密度的計算、數據組合、數據發送。圖2為綜合處理軟件流程圖。
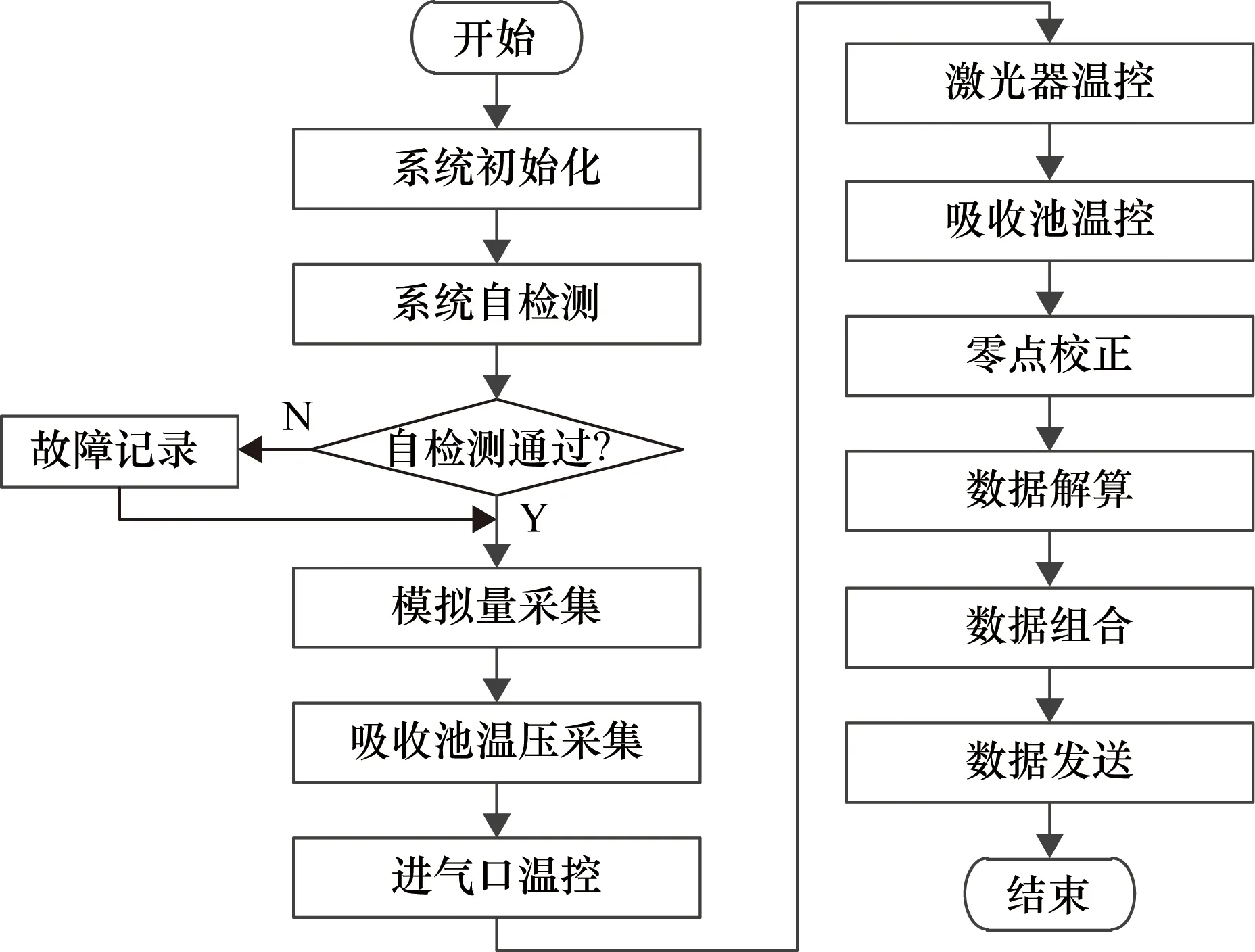
圖2 綜合處理軟件流程圖
信號驅動軟件是基于EPM240T100的嵌入式軟件,主要功能包括分頻計數模塊設計、正弦驅動信號設計、余弦驅動信號設計、復合驅動信號設計、解調輸出信號設計。圖3為信號驅動軟件流程圖。
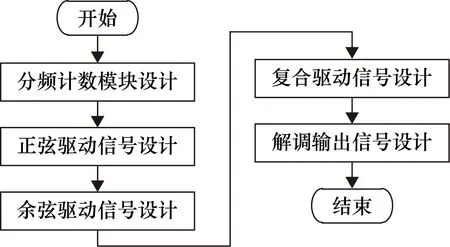
圖3 信號驅動軟件流程圖
4 試驗測試
4.1 精度檢測
利用露點發生器產生不同濕度的氣體用于系統精度檢測。采用冷鏡式露點儀作為測量參考。由露點發生器產生的不同濕度氣體,分別通過本系統和冷鏡式露點儀,測量結果如表1所示。
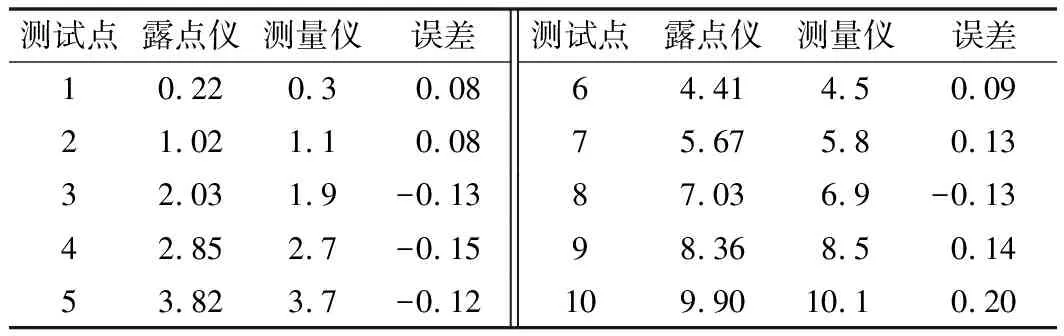
表1 實驗室測試結果 單位:g/m3
從表1可以得出,在0~10 g/m3的測量范圍內誤差小于3%。隨著濃度的增加,絕對誤差變大,在較大濃度的情況下,激光器調諧非線性以及光的散射和反射導致信噪比降低,從而引起測量誤差增大。
4.2 響應時間檢測
系統響應時間是衡量靈敏度的重要指標,測量值達到穩定值的90%即可認為是有效響應時間。系統開機預熱,當系統工作穩定后,給定不同濕度氣體,每0.5 s記錄檢測數據,檢測最終達到給定值90%時所用時間,測試結果如圖4所示。
圖4 系統響應時間
由圖4可知,系統響應時間為3 s左右。系統檢測周期為0.1 s,響應時間主要與氣體的流速和吸收池氣體濃度穩定時間有關。要進一步提高響應速度,需要對吸收池進行改進,加大進氣管路的直徑或在吸收池內設計氣流循環裝置。
4.3 飛行驗證
目前本系統已安裝在人工影響天氣飛機上,隨飛機進行了多次探測任務。選取2021年1月20日的飛行數據(見圖5)進行分析。
圖5 2021年1月20日飛行數據
飛行作業高度約為4300 m,氣溫約-16 ℃,氣壓605 hPa,飛機作業區域為云中,相對濕度為100%時,對應絕對水含量1.49 g/m3。從圖5中可以看出,系統測量的絕對水含量與當時氣象條件相符。在多次飛行中,系統工作穩定,表明設計達到了預期要求。
5 結束語
研究了基于TDLAS技術、激光波長調制技術、二次諧波檢測技術的機載水汽密度測量儀。首先對TDLAS測量的基本原理進行了研究,然后對本裝置的系統和軟件進行了概述,簡要說明了本裝置的主要組成、工作原理以及在研究過程中的考慮和解決方法。設計了滿足機載復雜環境的體積小、精度高、響應時間快的水汽密度測量裝置,創新性地設計了能夠將水氣分離的裝置,使得測量到的水汽密度不受水滴、冰晶的影響。考慮到在飛行中不斷變換的高度可能導致的吸收池結露,影響測量精度,設計了進氣管路、吸收池智能溫控。為了減小在低量程時的誤差,在系統工作過程中不斷進行失調訂正。
為了驗證系統設計是否達到要求,對系統進行了精度測試和響應時間測試,在0~10 g/m3的測量范圍內誤差小于3%,系統響應時間為3 s左右。之后又進行了飛行驗證,測得的水汽密度與當時的氣象條件相符。
機載水汽密度測量儀有較好的發展前景,通過分析不同航路的數據,不僅有助于更準確地預測雷暴、大霧、降雪天氣,還可以替代探空氣球,使得氣象探測變得實時、廉價,還可以裝在特定的飛機上以滿足特定區域的氣象探測。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
