基于非線性吸振器的深水導(dǎo)管架平臺減振特性研究
2022-09-21 03:38:04陳益群劉利琴吳志強(qiáng)胡文韜
船舶力學(xué) 2022年9期
陳益群,劉利琴,羅 超,吳志強(qiáng),胡文韜
(1.天津大學(xué)a.建筑工程學(xué)院;b.機(jī)械工程學(xué)院,天津 300072;2.海洋石油工程股份有限公司,天津 300461)
0 引 言
隨著海洋資源的開發(fā)走向深水海域,越來越多的深水導(dǎo)管架平臺投入使用。由于長期承受波浪、風(fēng)、流、地震等環(huán)境載荷的作用,不可避免地會引起導(dǎo)管架平臺系統(tǒng)的振動問題。特別是深水導(dǎo)管架平臺的剛度較小,低階自振頻率會落入波浪能量主要頻率范圍,產(chǎn)生較為劇烈的振動[1]。這不但會損壞平臺的結(jié)構(gòu)強(qiáng)度,還會對在平臺上進(jìn)行施工的人員身心健康與工作能力產(chǎn)生很大影響。因此開展波浪激勵下海洋平臺的減振研究,對平臺安全非常重要。
國內(nèi)外學(xué)者對導(dǎo)管架平臺的振動問題開展了一系列研究:孫樹民[2]通過在獨(dú)樁平臺上附加質(zhì)量調(diào)制阻尼器(TMD)進(jìn)行了波浪激勵和地震激勵下的減振分析,結(jié)果表明,TMD對波浪激勵作用下獨(dú)樁平臺的減振非常有效;Patil[3]在導(dǎo)管架平臺上安裝粘彈性摩擦阻尼器,增加了原結(jié)構(gòu)的粘性阻尼和橫向剛度,從而極大降低了海洋平臺的振動響應(yīng);李寧[4]運(yùn)用LQG 控制算法來對海洋平臺進(jìn)行磁流變阻尼器半主動振動控制和魯棒性研究,結(jié)果表明,雖然半主動控制和主動控制下的TMD 對平臺均具有十分良好的減振效果,但有源控制需要傳感器、外部能源等設(shè)備,比被動控制減振要求更為復(fù)雜,而且被動控制理論設(shè)計(jì)更為簡易,更適合在工程領(lǐng)域中使用。
傳統(tǒng)的TMD 線性吸振器減振頻帶較窄,在偏離減振頻帶時可能會出現(xiàn)振動放大現(xiàn)象[5]。基于此,人們研究了非線性吸振器(NVA),這是一種減振頻帶寬、魯棒性能好的減振裝置。一般來說,使用同等質(zhì)量的線性吸振器與非線性吸振器進(jìn)行減振分析,非線性吸振器往往會有更好的減振效果[6]。非線性的形式多樣,許多學(xué)者采用了純立方剛度的非線性吸振器作為研究對象,在面對沖擊載荷的情況下,滿足一定的立方剛度條件時,結(jié)構(gòu)會出現(xiàn)能量不可逆?zhèn)鬟f(TET)現(xiàn)象[7]。受簡諧激勵時,會出現(xiàn)一種特殊的強(qiáng)調(diào)制響應(yīng)(SMR)[8-9]。出現(xiàn)TET 和SMR 的情況下,主系統(tǒng)中的大部分能量會傳遞到非線性吸振器中,通過阻尼元件進(jìn)行耗散,從而實(shí)現(xiàn)減振的效果。對于NVA 的解析分析,目前多采用復(fù)變量平均法[10]。Luongo 和Zulli[11]采用了多尺度法混合諧波平衡法對方程進(jìn)行解析求解,這種方法不需要進(jìn)行復(fù)變量替換,參數(shù)的物理意義更加清晰。
本文基于非線性吸振器(NVA)對深水導(dǎo)管架平臺的波激振動進(jìn)行減振研究。采用多尺度混合諧波平衡法[11]對動力學(xué)方程進(jìn)行解析求解,分析結(jié)構(gòu)的響應(yīng)與非線性特性,并基于振動傳遞率[12]對非線性吸振器的參數(shù)進(jìn)行優(yōu)化。
1 平臺減振動力學(xué)建模
波浪作用下海洋平臺的第一階模態(tài)振動響應(yīng)占據(jù)整個結(jié)構(gòu)響應(yīng)的主要部分[13],且一階頻率更加接近波浪頻率。為了簡化計(jì)算,突出結(jié)構(gòu)的主要振動特性,考慮平臺運(yùn)動為單自由度(以下稱為主系統(tǒng)),吸振器為附加的一個含有非線性立方剛度的振子(以下稱為子系統(tǒng)),如圖1所示,并寫出兩自由度運(yùn)動方程:

圖1 海洋平臺減振模型Fig.1 Offshore platform vibration control model

式中:m1為平臺的一階模態(tài)質(zhì)量;m2為NVA 的質(zhì)量;c1和c2分別為海洋平臺和吸振器的阻尼;k1為平臺剛度;k2為吸振器的立方剛度;x1、x?1、x?1分別為主系統(tǒng)水平位移、速度、加速度;x2、x?2、x?2分別為附加的子系統(tǒng)水平位移、速度、加速度。平臺受到的波浪載荷處理為規(guī)則波fcos(Ωt)。
導(dǎo)管架平臺的樁腿直徑相對于波浪波長一般小于0.2,目前主要使用莫里森公式計(jì)算作用于樁腿上的波浪力。單位長度上樁腿水平受載為

式中:ρ為海水密度;Cd為拖曳力系數(shù);Cm為慣性力系數(shù);D為特征長度,這里為樁腿的直徑;u為某高度水質(zhì)點(diǎn)的水平速度;u?為某高度水質(zhì)點(diǎn)的水平加速度。u和u?由AIRY波理論得到。
2 運(yùn)動方程解析分析
2.1 基于多尺度混合諧波平衡法的運(yùn)動方程求解
為了簡化推導(dǎo)過程,進(jìn)行以下變量替換:

式中,z為主系統(tǒng)和子系統(tǒng)的相對位移。子系統(tǒng)質(zhì)量相對主系統(tǒng)來說較小,為了使用多尺度混合諧波平衡法對方程求解,引入小量ε?1對一些變量進(jìn)行重新標(biāo)度,變量替換之后的運(yùn)動方程為

引入?yún)f(xié)調(diào)因子σ,表示外激勵頻率接近平臺一階固有頻率的程度,Ω=ω+εσ。設(shè)解為

式中,t0=t,t1=εt,并引入

式中,cc為共軛復(fù)數(shù)。A是變量t1的待定復(fù)函數(shù),z11通過諧波平衡法設(shè)解:

其中,B1是變量t1的待定復(fù)函數(shù)。將式(11)~(12)代入式(8)中,消去永年項(xiàng),得到的一階攝動解的關(guān)系可以表示系統(tǒng)的慢不變流形方程,如式(13)所示:

式(13)得到了系統(tǒng)的不變流形方程,表示主系統(tǒng)和非線性吸振器的振幅關(guān)系。
把式(11)、(12)代入式(7),消去永年項(xiàng),得到第一個可解性條件為

為了進(jìn)一步分析二階攝動,需要對式(10)作進(jìn)一步分析。將式(11)、(12)、(14)代入式(7),求得x12,其中z12再由諧波平衡法來設(shè)解,得到:

將式(12)、(15)代入式(10)中,消除永年項(xiàng)后得到的解表達(dá)式與式(13)進(jìn)行B=B1+εB2重組,得到第二個可解性條件為

將式(17)代入式(14)、(16)中,分離實(shí)虛部,得到關(guān)于a、b、α、β的四個方程和解的形式,如式(18)所示:

由式(18)數(shù)值求解a、b、α、β四個變量,最終求得系統(tǒng)的一階攝動解為

2.2 幅頻響應(yīng)曲線
上一節(jié)的推導(dǎo)結(jié)果可以得到結(jié)構(gòu)的響應(yīng)時程圖,進(jìn)一步求解幅頻響應(yīng)曲線,可以更加全面地觀察振動響應(yīng)特性。
考慮式(19)當(dāng)a?=0,b?=0,γ?1=0,γ?2=0時,可以得到系統(tǒng)的平衡解,推導(dǎo)出以下由γ1和γ2表示的方程:

通過三角函數(shù)的關(guān)系可以將式(21)中的γ1和γ2消去,可以得到兩個含有a、b、σ的方程,再進(jìn)行代換消去a,可以得到只含有b和σ的非線性方程。求解方程則可以得到系統(tǒng)的幅頻響應(yīng)曲線。具體b和σ的表達(dá)式可參考附錄A。
2.3 平衡解穩(wěn)定性分析
同樣,當(dāng)式(18)中a?=0,b?=0,γ?1=0,γ?2=0時,為了分析平衡解的穩(wěn)定性,需要將式(18)寫成直角坐標(biāo)形式,由式(20)得到

式中,p1=acos(γ2),q1=asin(γ2),p2=bcos(γ2-γ1),q2=bsin(γ2-γ1),v1=σ,v2=0。將式(23)代入可解性條件式(14)、(16)并分離實(shí)虛部,得到以下四個表達(dá)式:

寫出式(24)的向量形式,并求其雅克比矩陣,并寫出該雅克比矩陣的特征方程式(25),其中特征方程系數(shù)的表達(dá)式在附錄A中給出。

根據(jù)羅斯霍爾維茲準(zhǔn)則,可判斷系統(tǒng)的穩(wěn)定性如下:
(1)當(dāng)δ4=0時,發(fā)生鞍結(jié)分岔,系統(tǒng)平衡點(diǎn)數(shù)目發(fā)生變化;
(2)當(dāng)δ1δ3>0,δ1δ2δ3-δ32-δ12δ4=0時,系統(tǒng)發(fā)生Hopf分岔。
3 算例和結(jié)果分析
3.1 平臺減振結(jié)果分析
本文算例參數(shù)[14]有:深水導(dǎo)管架平臺,樁腿長度為249 m,水深為218 m,等效樁腿直徑為1.83 m,一階模態(tài)質(zhì)量為7 852 307 kg,一階固有頻率為2.046 rad/s,主結(jié)構(gòu)阻尼比取為0.02。根據(jù)主結(jié)構(gòu)模型,初步選取非線性吸振器參數(shù)為ρ2=0.02,κ=100,ξ2=0.0034。計(jì)算海況取1.5 m波高、周期為3.07 s。
根據(jù)2.1節(jié)中的求解方法,得到近似解析解的響應(yīng)時歷曲線,并與數(shù)值模擬結(jié)果進(jìn)行對比(數(shù)值解采用四階龍格庫塔方法直接求解方程組(1)),對比結(jié)果如圖2所示。
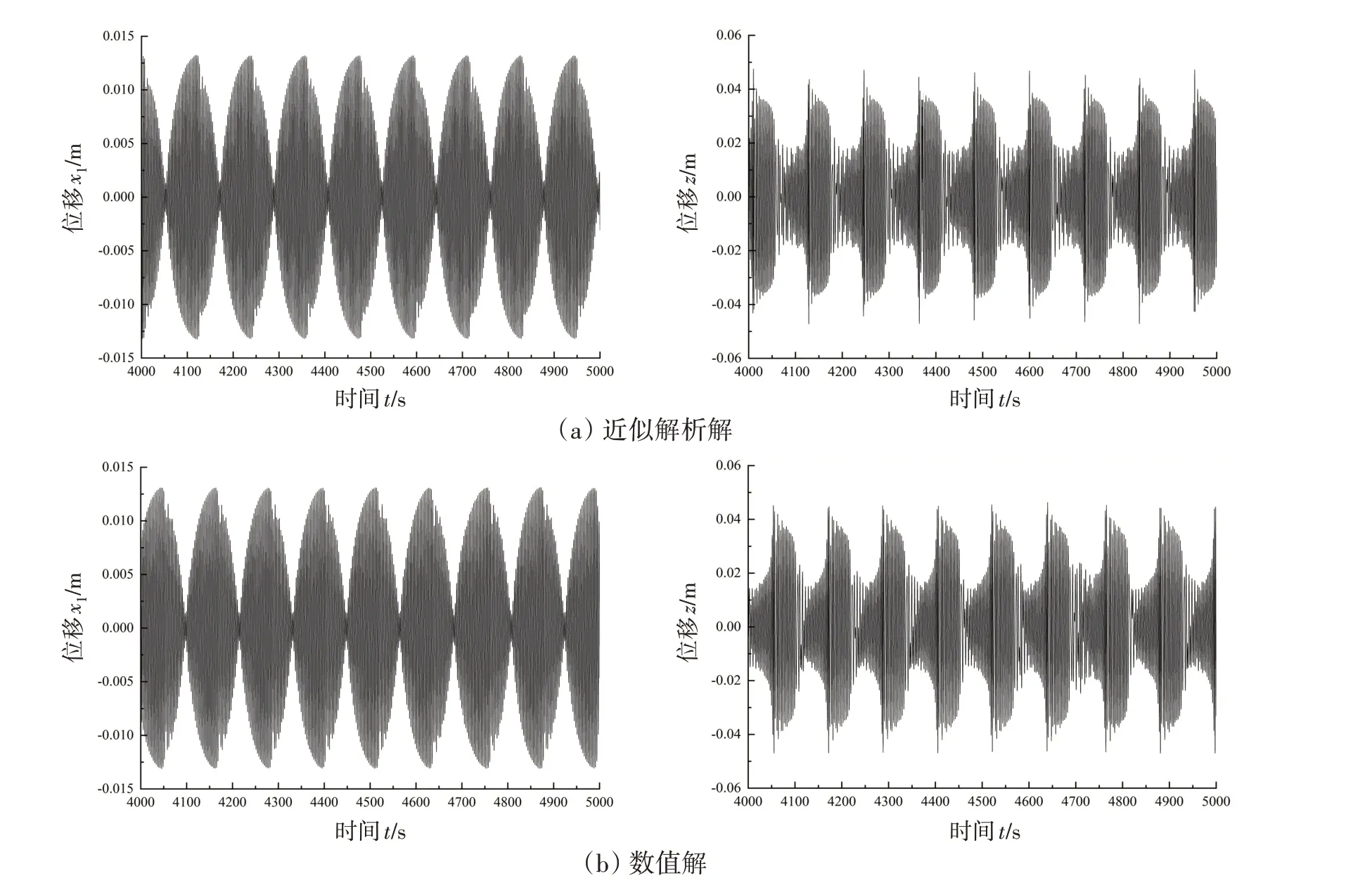
圖2 響應(yīng)時間歷程(σ=0)Fig.2 Response time history(σ=0)
圖2(a)表明,平臺響應(yīng)為非簡諧的概周期運(yùn)動,吸振器與平臺的相對運(yùn)動明顯大于平臺自身的運(yùn)動。此時,作用于主系統(tǒng)的部分能量轉(zhuǎn)移到了吸振器中,使得平臺的運(yùn)動響應(yīng)減小,從而實(shí)現(xiàn)了減振目的。比較圖2(a)和圖2(b)的結(jié)果表明,數(shù)值解與解析解吻合較好,驗(yàn)證了多尺度混合諧波平衡法求解的有效性。
圖3給出了根據(jù)解析解求出的幅頻響應(yīng)曲線,并根據(jù)2.2節(jié)中的方法判定解的穩(wěn)定性。圖中直線表示穩(wěn)定的周期解,點(diǎn)劃線表示出現(xiàn)了不穩(wěn)定解,其中不穩(wěn)定解包括出現(xiàn)了Hopf分岔與鞍結(jié)分岔。計(jì)算表明,發(fā)生Hopf分岔時,結(jié)構(gòu)的振動響應(yīng)出現(xiàn)了概周期現(xiàn)象,系統(tǒng)的振動幅值不斷變化。圖3(a)表明,主系統(tǒng)幅頻響應(yīng)曲線在固有頻率附近向下彎曲,整體表現(xiàn)不穩(wěn)定解,最低幅值為0.005 m左右。

圖3 幅頻響應(yīng)曲線Fig.3 Amplitude-frequency response curve
圖3(b)表明,子系統(tǒng)響應(yīng)在左上角出現(xiàn)了部分區(qū)域響應(yīng)相對較高的平衡解,經(jīng)分析,為協(xié)調(diào)因子σ=[-0.18,-0.072]時出現(xiàn)了多解,具體解的情況受初始條件影響。圖3(b)共振區(qū)域運(yùn)動響應(yīng)明顯放大,同向表現(xiàn)為不穩(wěn)定解。因此,這時在共振區(qū)域附近,大部分能量轉(zhuǎn)移到了非線性吸振器上,使得平臺的運(yùn)動幅值減小。以下通過數(shù)值方法計(jì)算不同初始條件下的響應(yīng),結(jié)果如圖4所示。

圖4 不同初值的主子系統(tǒng)相對位移時程響應(yīng)(σ=-0.1)Fig.4 Time history response at different initial values
圖4表明,在初始位移較小時,平衡點(diǎn)幅值在0.006 m 附近,如圖4(a)所示;初始位移較大時,平衡點(diǎn)的幅值在0.035 m左右。根據(jù)圖3(a),在這個多解范圍內(nèi),主系統(tǒng)位移幅值會偏大一些,然而整體仍小于0.011 m。在發(fā)生這類鞍結(jié)分岔時需要格外注意,可能會發(fā)生跳躍現(xiàn)象使得結(jié)構(gòu)的動力響應(yīng)放大,非線性吸振器反而增大了系統(tǒng)振動幅值。
3.2 平臺減振系統(tǒng)強(qiáng)調(diào)制響應(yīng)機(jī)理
平衡解穩(wěn)定性分析表明,系統(tǒng)響應(yīng)可能發(fā)生類似概周期的強(qiáng)調(diào)制響應(yīng)。因此分析其特有的強(qiáng)調(diào)制響應(yīng)對認(rèn)識基于非線性吸振器的海洋平臺減振效果有重要意義。將式(17)代入式(13),分離實(shí)虛部,得到不變流形的具體方程為

根據(jù)式(26)可得到慢不變流形,如圖5所示。
圖5反映了系統(tǒng)中a、b的變化關(guān)系,可以看到不變流形含有穩(wěn)定與不穩(wěn)定兩個部分。當(dāng)系統(tǒng)沿著慢不變流形運(yùn)動到達(dá)N1點(diǎn)時,發(fā)生跳躍至Nu點(diǎn);接著系統(tǒng)運(yùn)動沿著不變流形向下運(yùn)動,到達(dá)N2點(diǎn)時,又會跳躍到Nd點(diǎn),繼續(xù)向上運(yùn)動,形成一個往復(fù)的跳躍循環(huán),這就是發(fā)生強(qiáng)調(diào)制響應(yīng)的機(jī)理。

圖5 慢不變流形Fig.5 Slowly invariant manifold
但是產(chǎn)生這種跳躍現(xiàn)象還需要滿足一定的參數(shù)條件,主要影響參數(shù)包括非線性吸振器本身的參數(shù)和外激勵幅值的影響。在ρ2=0.02,κ=100,ξ2=0.0034 的參數(shù)下,就發(fā)生了這種強(qiáng)調(diào)制響應(yīng),如圖2所示。發(fā)生這類強(qiáng)調(diào)制響應(yīng)時,外激勵頻率往往接近結(jié)構(gòu)固有頻率,此時結(jié)構(gòu)的部分能量會明顯地傳遞到NES 中,從而減小了主系統(tǒng)的振動幅值。
3.3 平臺減振效果評價
本節(jié)對平臺的減振性能進(jìn)行評價。首先采用振動傳遞率的評價方法,確定非線性吸振器的最優(yōu)參數(shù),獲得最優(yōu)的非線性吸振器剛度和阻尼。振動傳遞率定義為T=RMS(x1)/F,這里F=0.002 54,表示海洋平臺振動有效值與外激勵幅值的比值[12]。
以下結(jié)合全局搜索的方法,基于振動傳遞率的評價方法對非線性吸振器參數(shù)進(jìn)行優(yōu)化。為了考慮到在共振頻率附近的整體減振效果,這里的RMS(x)取σ∈[-0.2 0.2]時,協(xié)調(diào)參數(shù)σ與數(shù)值掃頻計(jì)算得到的有效值曲線圍成的面積,得到系統(tǒng)振動傳遞率三維圖,如圖6所示。
由圖6 可知,不同的參數(shù)組合下,可以得到不同的減振效果。在較差的參數(shù)組合條件下,最大振動傳遞率達(dá)到了24.65;而在較好的參數(shù)組合條件下,最小振動傳遞率達(dá)到14.3,最小振動傳遞率對應(yīng)的非線性吸振器的剛度κ=279、阻尼ξ2=0.0011。優(yōu)化參數(shù)非線性剛度和阻尼在κ∈[300,600]和ξ2∈[0.012,0.02]范圍內(nèi)變化時,仍能保持振動傳遞率低于17.4的減振效果。

圖6 基于振動傳遞率的參數(shù)優(yōu)化圖Fig.6 Parameter optimization diagram based on vibration transmission rate
將得到的優(yōu)化參數(shù)代入式(1),求解得到如圖7所示的幅頻響應(yīng)曲線。優(yōu)化后的參數(shù)幅頻響應(yīng)曲線,在σ=0 時主系統(tǒng)的振動幅值為0.005 6 m,而減振前的振動幅值為0.015 m,此時的減振效果為62.7%,在偏左區(qū)域存在動力放大現(xiàn)象,偏右區(qū)域則整體振動幅值偏小。此時主要表現(xiàn)為鞍結(jié)分岔現(xiàn)象,在大范圍內(nèi)出現(xiàn)多解,但共振區(qū)域內(nèi)右側(cè)的減振性能相對參數(shù)優(yōu)化之前有了較好的提升。
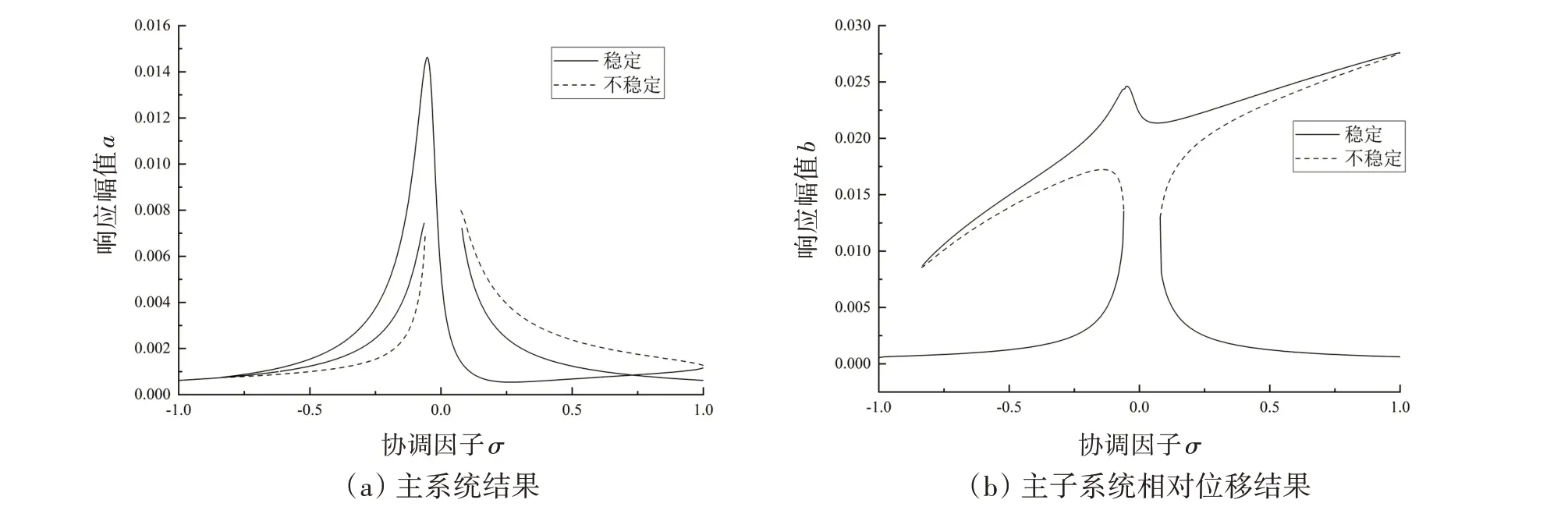
圖7 幅頻響應(yīng)曲線Fig.7 Amplitude-frequency response curve
4 結(jié) 論
本文基于非線性吸振原理研究規(guī)則波激勵下海洋平臺的被動減振,建立了海洋平臺-非線性吸振器系統(tǒng)兩自由度耦合動力學(xué)方程,采用多尺度混合諧波平衡法研究了系統(tǒng)的非線性動力特性。主要結(jié)論如下:
(1)附加了非線性吸振器之后深水海洋平臺系統(tǒng)可能會出現(xiàn)鞍結(jié)分岔和Hopf 分岔的現(xiàn)象,具有明顯的非線性。
(2)全局搜索的方法優(yōu)化后,非線性吸振器在共振頻率附近有很好的減振效果。同時給出了優(yōu)化參數(shù)后的幅頻響應(yīng)曲線,可以很好地觀察到其在整個頻率變化下的減振性能和非線性特性,更加全面地了解設(shè)計(jì)的非線性吸振器。
(3)非線性吸振器的非線性剛度和阻尼在一定范圍內(nèi)變化時,仍可以保持較好的減振性能,相對于線性吸振器而言,具有較好的穩(wěn)定性。在σ=0時,最優(yōu)減振效果為62.7%。
附錄A:


猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40