液壓驅動下肢外骨骼系統設計與控制研究
2022-09-20 02:12:56韓亞麗李沈炎史傳棋
液壓與氣動 2022年9期
孫 翰, 韓亞麗, 李沈炎, 史傳棋
(南京工程學院機械工程學院, 江蘇南京 211167)
引言
下肢助力外骨骼是穿戴于人體外側且與人配合完成下肢運動的機電一體化設備,廣泛應用于軍事、民用和醫療康復等領域。外骨骼是綜合技術的載體,融合了傳感、人機交互、控制等多學科領域的關鍵技術。隨著現代化信息技術、多傳感技術和現代化醫療等技術的發展,對下肢外骨骼機器人的研究也越發深入。
隨著人口老齡化進程加快,老年疾病和肌體損傷等疾病患者數量也不斷增長,導致下肢殘障人士數量快速增多[1],我國現有的運動康復理療師與殘障患者數量比例嚴重失衡。下肢外骨骼能為穿戴者提供運動助力和支撐作用,可幫助下肢殘障患者進行康復訓練,緩解助老助殘壓力[2-4];同時,外骨骼可幫助穿戴者完成高強度任務,有增強穿戴者運動能力和負重能力的作用[5-8]。面對人口老齡化和殘障人士增多帶來的助老助殘社會問題,傳統的康復醫療無法滿足需求,而康復助力外骨骼機器人能夠有效彌補空缺,成為了研究熱點。最早由美國提出外骨骼的概念,國內外的學者分別研制了不同的外骨骼樣機,并提出了不同的控制算法[9-15]。
本研究針對穿戴外骨骼過程中存在人機耦合控制問題,分析人體行走運動機理及規律,設計并搭建了一款液壓驅動的下肢外骨骼系統。針對下肢外骨骼系統動力學模型參數的不確定性和外界干擾,提出一種滑模控制方法,并進行了控制仿真,為實驗設計提供理論支撐,通過實驗驗證了機構設計的合理性與控制策略的有效性。
1 液壓驅動下肢外骨骼機構設計
1.1 整體機構設計
下肢助力外骨骼整體構型與人相似,可以將下肢外骨骼看作是由連桿通過各類運動副組成的鏈式結構。對于下肢外骨骼助力機器人整體構型設計,在滿足助力助行功能目標的基礎上,將外骨骼的下肢關節都置于人體下肢外側,盡可能簡化機器人的關節自由度,避免因為關節自由度過多出現控制困難、機構冗余等問題[16]。
下肢外骨骼機構的自由度應滿足人體下肢運動所需,分別設計了髖關節2個自由度、膝關節1個自由度、踝關節2個自由度。針對不同穿戴者的適用性需求,應滿足尺寸可調節穿戴,設計了長度可調節的小腿桿和寬度可調節的腰部裝置。為了提高穿戴者穿戴外骨骼的舒適性,設計了柔性大小腿桿綁縛裝置和背帶。此外,還設計了關節限位裝置來保障穿戴行走安全。整體結構如圖1所示。
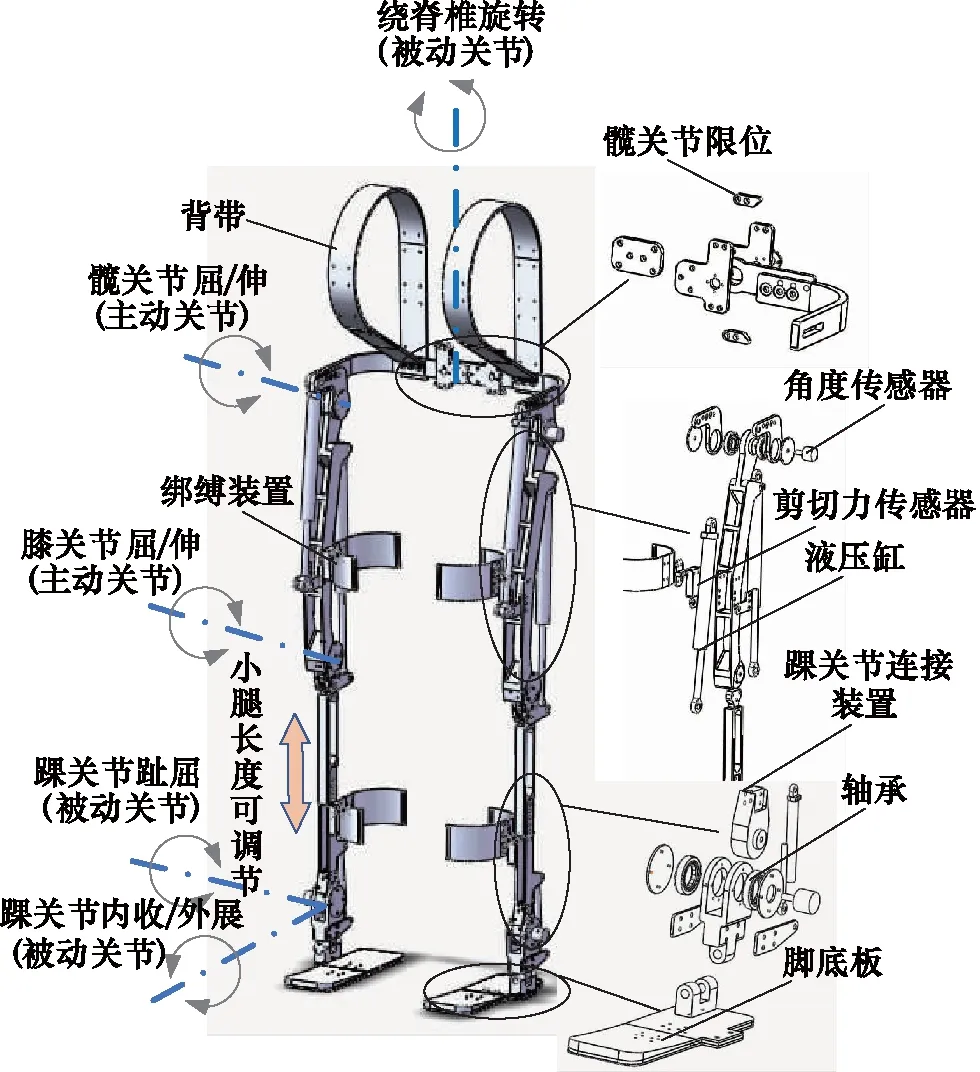
圖1 整體機構圖Fig.1 Overall structure
1.2 驅動關節設計
由于液壓驅動方式具有工作平穩、易于實現過載保護等優點[17-18],本研究采用液壓驅動的方式,通過伺服閥控制液壓缸的伸縮來帶動驅動關節的運動。將髖關節和膝關節設計為外骨骼的主動關節,液壓缸的行程決定關節角度的運動范圍,根據液壓缸在外骨骼機構中安裝位置,對膝關節和髖關節處液壓缸的行程參數進行計算分析,從而進行液壓缸的尺寸設計,髖關節和膝關節液壓缸長度調節范圍分別為300~390 mm和264~375 mm。2個主動關節在結構上類似,以膝關節為例,如圖2所示,由以下部分組成:角度傳感器、軸承端蓋、軸承、小腿連接板、液壓桿、大小腿桿和連桿螺栓。其中,角度傳感器用來檢測關節實時轉動角度,反饋到上位機以實現關節實時控制;小腿連接板與小腿桿固連;液壓缸的一端通過長螺栓與小腿連接板連接形成轉動副,另一端與類似的大腿連接板連接形成轉動副,通過液壓缸的伸縮帶動膝關節的伸直與彎曲,實現膝關節的主動驅動。
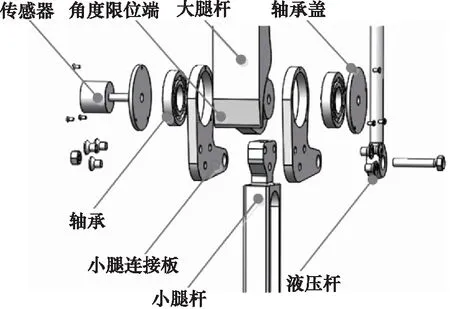
圖2 膝關節機構爆炸圖Fig.2 Exploded view of knee joint mechanism
2 下肢外骨骼動力學分析
人在行走時雙腿的運動主要是矢狀面上的周期性往復運動,故本研究對外骨骼在矢狀面內進行動力學分析。設計了以髖關節和膝關節為主動關節的外骨骼機器人,可將外骨骼簡化成在矢狀面內的多連桿機構,按照腳掌與地面的接觸情況把步態分為3個典型狀態:單腿支撐、雙腿支撐(雙腳掌全著地)、雙腿支撐(單腳掌全著地),如圖3所示。
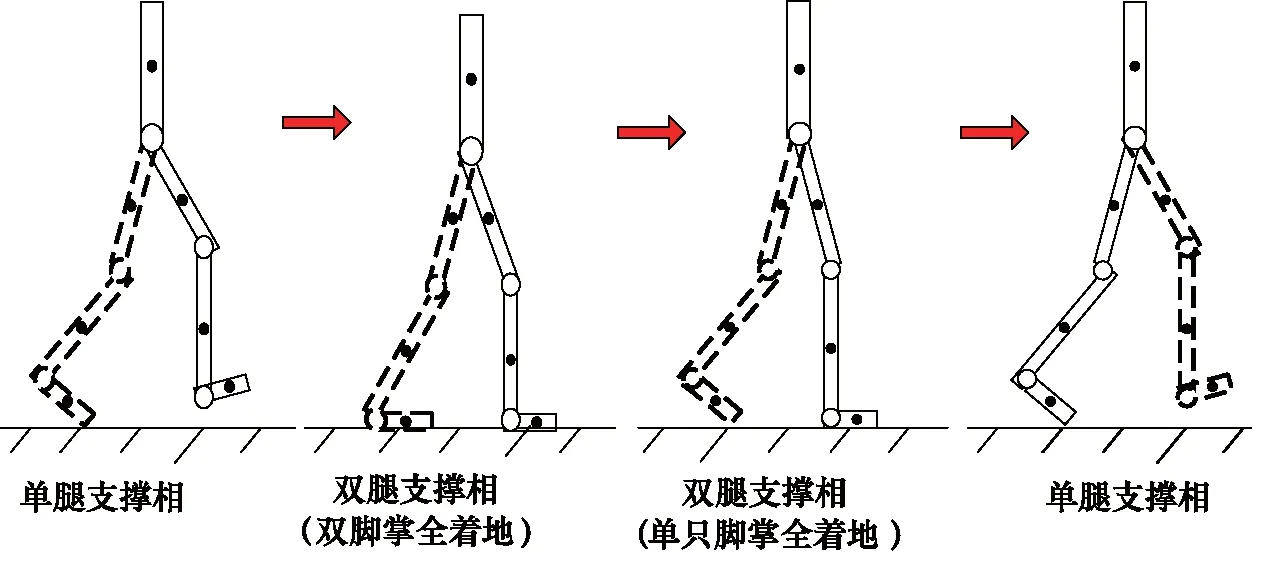
圖3 步態周期相位圖Fig.3 Gait cycle phase
采用拉格朗日法建立外骨骼的動力學方程, 得到的拉格朗日函數為:
L=Ek-Ep
(1)
下肢助力外骨骼系統的拉格朗日動力學方程為:
(2)
式中,Ek—— 外骨骼系統的總動能,J
Ep—— 系統的總勢能,J
qi—— 廣義坐標
τi—— 廣義力(力或力矩)
對單腿支撐相進行分析,模型如圖4所示,單側腿著地且承載整個外骨骼系統重量,另一側腿處于擺動階段。建立平面坐標系,設定腳尖與地面接觸點為坐標原點(x1,y1);(xi,yi)為連桿位于坐標系中的坐標;li為各連桿的長度;di表示第i號連桿到第(i-1)號連桿的距離,則7連桿下肢外骨骼模型系統的勢能表達式為:
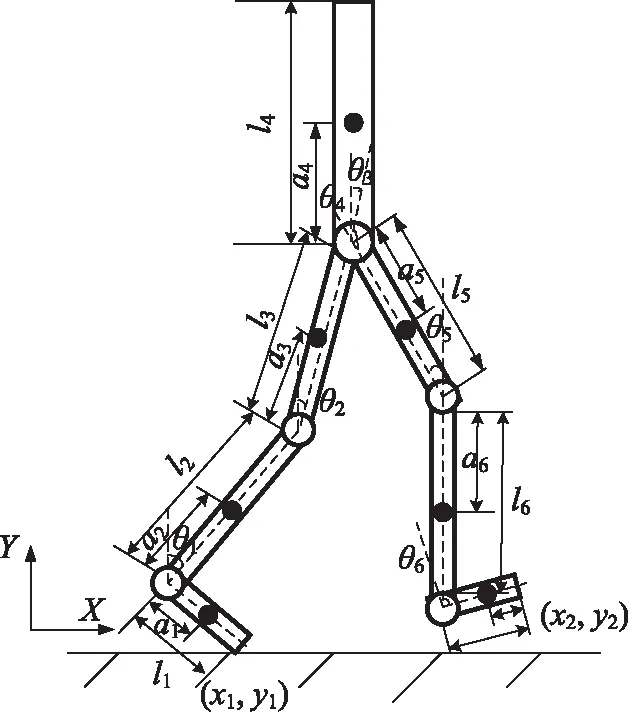
圖4 單腿支撐相模型Fig.4 Model of single leg support phase

(3)
式中,mi為各連桿的質量;(xci,yci)為各連桿質心的坐標;θi為外骨骼連桿之間的夾角,對應各關節運動角度。外骨骼動能表達式為:
(4)
將式(3)與式(4)代入拉格朗日函數L=K-P,得:
(5)
由于下肢外骨骼系統在實際控制時一般采用關節角度作為實際廣義坐標,這里將坐標qi轉化為關節角度θi:
(6)
整理可得下肢外骨骼7連桿模型動力學方程為:
(7)
式中,M為慣性矩陣;C為向心力矩陣;G為重力矩陣;τi為外骨骼連桿關節間輸出力矩大小;τ1為支撐腿與地面接觸踝關節處的力矩;τ2為支撐腿位于膝關節處的力矩;τ3為支撐腿位于髖關節處的力矩;τ4為擺動腿位于髖關節處力矩;τ5為擺動腿位于膝關節處的力矩;τ6為擺動腿與地面接觸踝關節處的力矩,各參數詳細結果較為冗長,不在此詳述。
還可以通過類似的方式對另外兩種典型步態狀態進行動力學分析,采用相同方式進行建模,等效與地面約束成7連桿模型,如圖5所示。這兩種狀態動力學求解方式與單腿支撐類似,不再贅述。
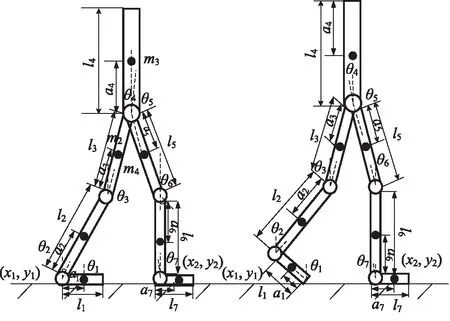
圖5 典型步態相位模型Fig.5 Model of typical gait phase
3 控制策略研究
滑模控制是一種變結構控制,其控制結構可根據系統的誤差和誤差的各階導數時刻變化[19-20]。
考慮干擾和誤差的影響,將設計的液壓驅動下肢外骨骼描述為:

(8)
式中,ΔM,ΔC,ΔG都為未建模干擾項;d為外界干擾因素。
取f(t)作為干擾力矩函數代替干擾項,則:

(9)
可建立如下方程:

(10)

(11)
(12)
上式稱為等效控制方程,由于干擾項難以完美預估,所以先不考慮干擾因素,通過設計切換控制律ksgn(s)來平衡未建模干擾項和外界干擾因素。
設計滑模控制律如下:
(13)
式中, 設定k=max<1|f>1|+η,η為可調因子且值大于0,主要用于平衡干擾因素以及動力學建模不精確產生的誤差,減小數值,外界干擾因素和動力學模型誤差得不到平衡,系統穩定性較差;增大數值,系統會更快趨近滑模面,但會容易產生抖振現象。根據控制結果的不同進行調整,當系統誤差較大時,增大值以提高控制性能;當系統誤差較小時,適當減小值以減小抖振。
=s[-M-1(f+ksgn(s))]
(14)
根據設計好滑模控制器,通過不斷調整參數來降低系統響應時間和抖振。設計了如圖6所示外骨骼隨動控制仿真實驗,仿真結果如圖7所示。
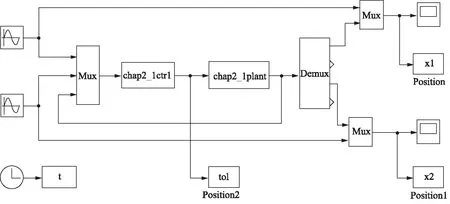
圖6 Simulink控制仿真框圖Fig.6 Control simulation of Simulink
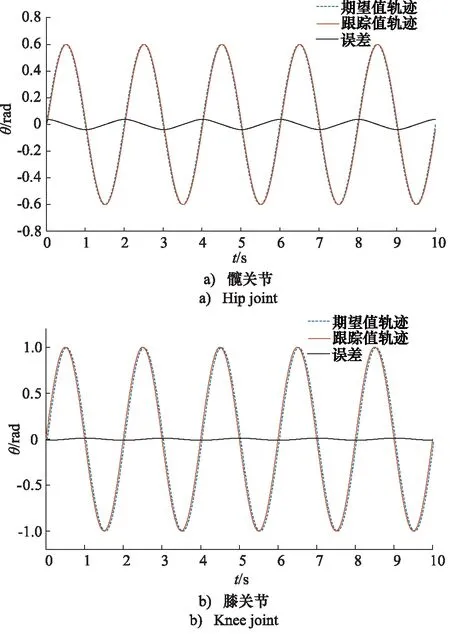
圖7 仿真結果圖Fig.7 Simulation results
對圖7中髖關節和膝關節跟蹤效果仿真結果進行分析可知,采用的滑模控制策略的下肢外骨骼能夠實現良好的跟蹤性能,髖關節和膝關節能夠較好的跟隨期望軌跡運動, 跟隨誤差較小,表明控制效果符合實際要求,可以達到隨動控制的目的。
4 實驗平臺搭建與實驗研究
4.1 硬件平臺搭建
搭建的下肢助力外骨骼機器人實驗平臺以及實驗樣機,如圖8所示,在結構設計方面通過調整可適應不同身高、年齡的人使用,通過合理的機械限位和軟件限位增強了整體的安全性,在下肢步態康復訓練機器人系統設計中,通過dSPACE控制器設計算法來驅動機器人實現步態軌跡控制,可通過設計和修改控制程序算法的方式,從而來滿足各類實驗的目的。
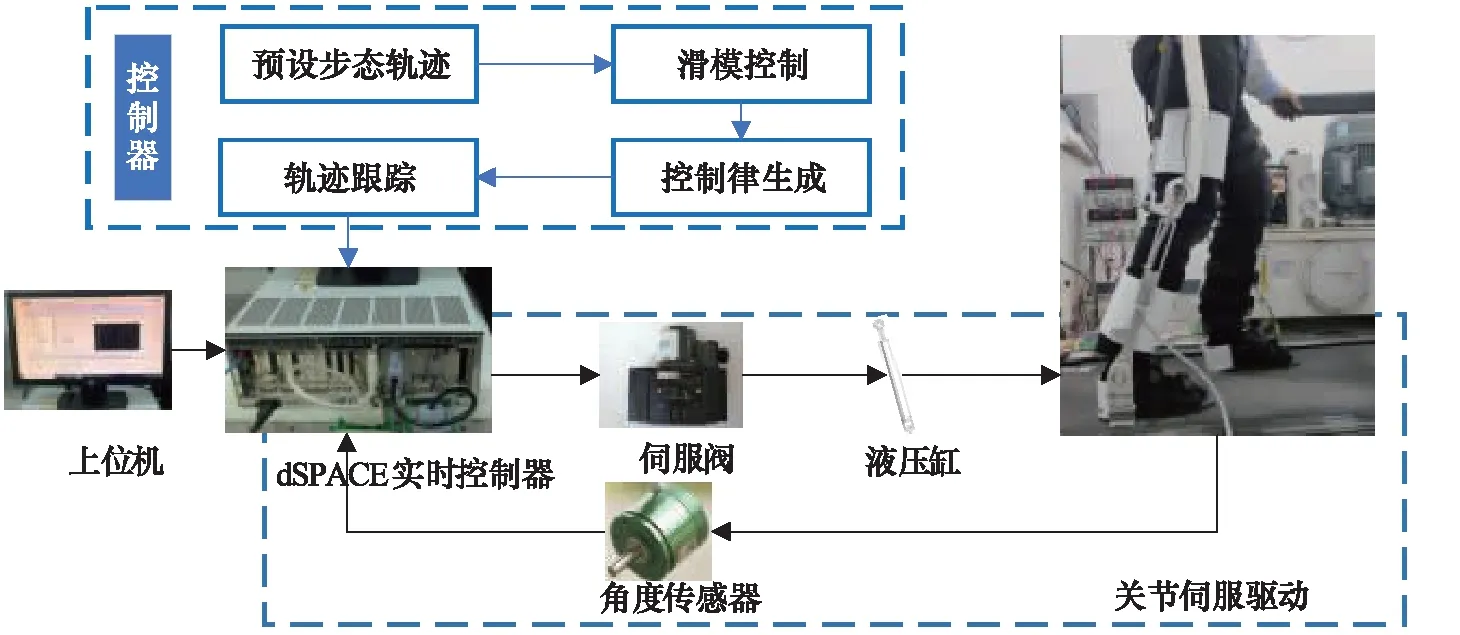
圖8 下肢助力外骨骼實驗平臺Fig.8 Experimental platform for lower limb exoskeleton
下肢助力外骨骼硬件平臺主要有上位機、dSPACE實時控制器、液壓站、伺服閥、液壓缸、傳感器、外骨骼機構本體和電源模塊等。上位機編寫控制器控制程序來控制伺服閥進行液壓油控制,通過調整液壓缸中液壓油量的多少來控制液壓缸的伸縮,從而帶動主驅關節的運動。
4.2 軟件平臺搭建
在MATLAB/Simulink中進行外骨骼機器人控制程序模塊的設計。在RTI庫中選擇DS2004ADC模塊實現控制系統AD轉換功能,選擇庫中的DS2102模塊實現控制系統的DA轉換功能,設定其相應參數。最后通過MATLAB中build model按鈕將圖形化語言轉為dSPACE控制器能識別的C語言,實現實時仿真運行。其中,Simulink模塊編寫的模塊程序分為傳感器數據采集與處理模塊、滑模控制算法模塊。
基于ControlDesk平臺設計下肢外骨骼的上位機界面,如圖9所示,可對控制系統中的參數進行可視化顯示,并根據實驗效果進行調整,便于研究不同參數對外骨骼運動效果的影響,最終得到最優的方案。此外,該平臺具備數據儲存和記錄功能,實驗結束后可以對每一段的實驗進行分析,通過MATLAB中進行數據分析處理。
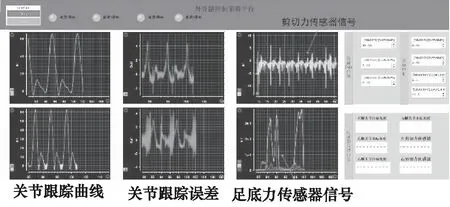
圖9 上位機控制平臺界面Fig.9 Control platform interface of host computer
4.3 下肢外骨骼實驗研究
1) 空載預設步態實驗
通過關節角度控制器實現良好的步態軌跡跟蹤是實現本實驗外骨骼樣機控制的基礎,為此,進行了滑模控制器關節角度預設步態跟蹤實驗。為了避免人為因素的干擾,實驗過程中均將外骨骼實驗樣機固定在鋁型材鋼架上。
設計的外骨骼機器人髖關節和膝關節為主動關節,踝關節為被動關節。因此在實際實驗時,選取采集好的一組健康人員下肢兩側髖關節和膝關節軌跡曲線作為預設步態曲線和外骨骼髖、膝關節實時角度輸入到滑模控制器中進行實驗,控制器輸出為兩側髖關節和膝關節的關節力矩控制信號,經過參數整定后,得到圖10所示的關節步態軌跡跟蹤結果。
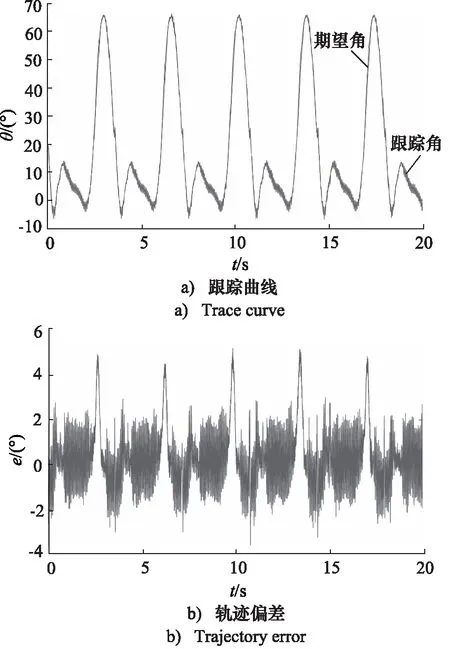
圖10 膝關節空擺實驗結果Fig.10 Results of knee joint swing test
由圖10可知,外骨骼膝關節軌跡的最大偏差為5°,偏差較小,滿足實驗要求。進行參數整定時,為保證系統的穩定性,增益k不能過小,系統存在輕微振蕩。同時,外骨骼和液壓缸桿之間存在一定的裝配間隙,外骨骼在空載實驗中沒有穿戴者的吸振作用,機械腿運動慣性加劇了振蕩,且在頻繁變向階段最為明顯。
2) 預設步態穿戴實驗研究
實驗安排了身體狀況良好、身高178 cm、體重75 kg 的實驗室成員參與穿戴實驗。通過大腿桿、小腿桿、腰部以及下肢的柔性綁帶將下肢助力外骨骼與人體并聯,穿戴者雙手扶跑步機扶手保持身體平衡。穿戴實驗過程中根據穿戴者的下肢大腿、小腿參數以及穿戴舒適性合理調整下肢外骨骼的大、小腿桿的長度,確保穿戴者關節軸與下肢外骨骼關節軸的軸心在對齊,保證其在載人預設步態助力實驗過程中的舒適性和協調性,依舊將預設步態曲線和實時關節角度作為控制器輸入,輸入到控制器中進行外骨骼的控制。
由圖11實驗結果可知,穿戴實驗下外骨骼膝關節軌跡的偏差主要在-2°~+3°之間,排除實驗過程中跑步機電機帶來的干擾,最大偏差為5°,實驗結果顯示,膝關節在關節拐點處的偏差要大于其他階段的誤差。對比圖10b空載條件下的軌跡偏差結果,抖振幅度有所下降,穿戴者下肢在此起到了吸振作用,減輕了裝配誤差和慣性因素帶來的損害,總體偏差依舊較小,控制器具有較好的魯棒性。此外,由于穿戴實驗在跑步機上進行,跑步機電機電磁干擾對傳感器信號產生影響, 通過在電路中加裝濾波器后減弱了這種影響,相較空載實驗結果,圖11中跟蹤角度軌跡信號和軌跡偏差曲線仍多出了一些毛刺,但對控制系統本身影響不大。

圖11 膝關節穿戴實驗結果Fig.11 Wearing experiment results of knee joint
5 結論
設計了一種基于液壓驅動的下肢助力外骨骼機器人。通過簡化外骨骼模型,對下肢外骨骼進行動力學分析,基于拉格朗日法計算出髖關節和膝關節驅動力矩。設計了一種滑模控制算法,旨在提高外骨骼跟蹤精度。搭建了基于dSPACE實時仿真系統的下肢助力外骨骼控制實驗平臺,通過Simulink和ControlDesk軟件編寫上位機程序。進行了下肢助力外骨骼機器人的空載預設步態實驗和預設步態穿戴實驗,實驗結果表明外骨骼性能良好,驗證了設計的助力外骨骼機構設計的合理性與控制策略的有效性。在后續的研究中,在控制上進行力與位置的雙閉環控制策略設計以實現主動控制。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
英語世界(2022年9期)2022-10-18 01:11:18
金橋(2020年9期)2020-10-27 01:59:44
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
藝術啟蒙(2018年7期)2018-08-23 09:14:18
商周刊(2017年17期)2017-09-08 13:08:58
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
發明與創新(2016年38期)2016-08-22 03:02:52
