饋能磁流變半主動懸架模糊滑模控制
2022-09-20 02:13:04葛宇超張弘揚
液壓與氣動 2022年9期
關鍵詞:系統
葛宇超, 劉 剛, 苗 豐, 張弘揚
(沈陽航空航天大學機電工程學院, 遼寧沈陽 110136)
引言
懸架系統是車輛的重要組成部分,用于衰減、降低路面激勵帶來的車身振動,對車輛的乘坐舒適性、行駛平順性和路面附著性有較大的影響[1]。半主動懸架開始研究于20世紀80年代初[2],通過實時調節懸架系統的阻尼或剛度特性來改善車輛性能。相比于主動懸架,其結構更簡單,能耗更少[3]。因此半主動懸架在車輛行業中的應用越來越廣泛。
磁流變液是一類在磁效應下,可以迅速、可逆的從牛頓流體轉化為非牛頓流體的智能材料[4]。磁流變減振器就應用了這一特點,磁流變減振器具有阻尼力可控性好、對高溫適應性強、反應速度快等優點[5],能夠很好地應用于半主動懸架。
傳統的磁流變減振器工作時需要外部電源,對于懸架的振動能量也無法進行回收。因此,對懸架能量回收技術的研究成為近幾年國內外學者的研究方向[6]。CHEN等[7]研究并驗證了將直線電機應用于磁流變減振器的可行性。CHOI等[8]設計了利用直線電機受迫振動回收能量的饋能磁流變減振器,將電磁感應發電裝置集成在磁流變減振器的活塞上,實現了振動能的收集。董小閔[9]提出一種利用滾珠絲杠回收能量的采集器,通過螺母的直線運動帶動絲杠旋轉,從而帶動發電機旋轉產生電能實現能量回收。
對于半主動懸架系統而言,采用合理的控制策略才能實現懸架良好減振性能。滑模變結構控制具有抗干擾能力強、魯棒性好等優點,能夠很好的運用于半主動懸架的控制中[10]。樓少敏等[11]基于滑模理論設計滑模控制器,并使用平滑函數緩解系統的抖振。秦武等[12]驗證了基于天棚控制的滑模控制策略對半主動懸架控制的有效性。趙強等[13]驗證了模糊滑模控制器的有效性。
基于此,針對單筒減振器需做體積補償的特點,提出了一種饋能磁流變減振器結構,通過直線饋能和滾珠絲杠饋能相結合來實現能量的回收利用。并建立了相應的力學模型和饋能模型,以及相應的二自由度1/4車半主動懸架系統數學模型。提出了一種基于混合天地棚阻尼控制的滑模變結構控制策略,針對滑模控制系統的抖振問題,使用飽和函數替代符號函數,并運用模糊控制優化滑模控制器,從而改善系統的穩定性。最后,用諧波疊加法生成路面激勵輸入,分別對被動懸架,基于混合天地棚阻尼控制和基于模糊滑模控制的半主動懸架進行對比仿真分析,驗證饋能磁流變減振器結構的可行性和模糊滑模控制策略的有效性。
1 饋能磁流變半主動懸架結構和原理
饋能磁流變半主動懸架系統如圖1所示,該系統包含饋能磁流變減振器、彈簧、模糊滑模控制器和超級電容。車輛在行駛過程中,不平整的路面造成車身振動,控制器控制電容輸出不同的電流,使得磁流變減振器產生相應的阻尼力實現減振,減振器的往復運動通過饋能裝置實現能量回收。
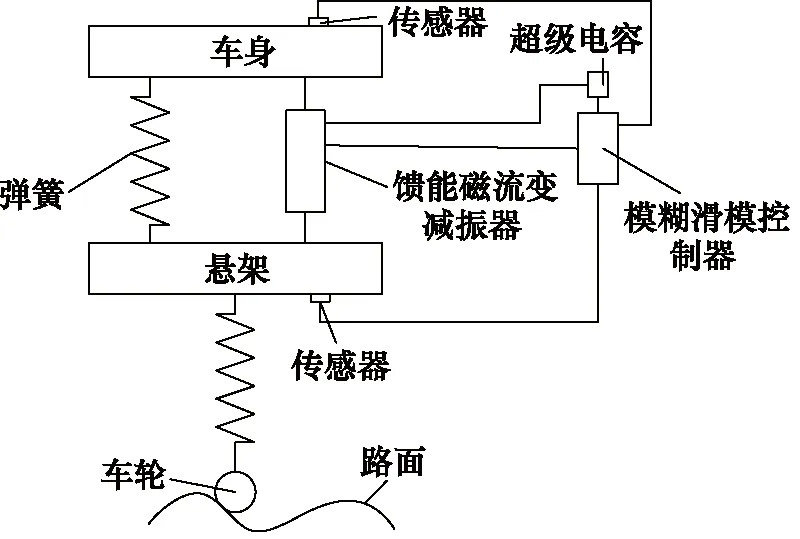
圖1 饋能磁流變半主動懸架系統結構圖Fig.1 Structure diagram of energy regenerative magnetorheological semi-active suspension system
其中,饋能磁流變減振器結構如圖2所示,其主要由減振裝置、饋能裝置(包含直線饋能和滾珠絲杠饋能)、電能管理模塊組成。由圖2可知直線饋能裝置的外筒隨著活塞桿做往復直線運動,帶動直線饋能裝置外筒上的線圈相對減振器工作筒上的永磁鐵做往復直線運動。同時活塞桿的往復直線運動迫使滾珠絲杠饋能裝置的滾珠絲杠做往復直線運動,實現體積補償。然后通過絲杠螺母傳遞,絲杠的直線運動使得螺母帶動永磁環轉子轉動。發電線圈內部磁通量發生變化,產生感應電動勢。并由電能管理模塊將產生的交流電轉換成直流電儲存在超級電容中。
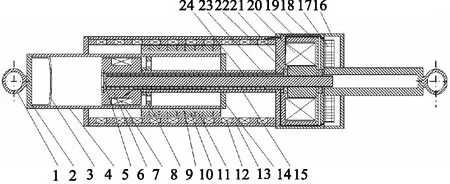
1.吊耳 2.下端蓋 3.氣囊 4.工作筒 5.絲桿活塞 6.活塞7.勵磁線圈 8.導向器 9.隔磁材料 10.永磁鐵 11.背鐵12.直線饋能線圈 13.直線饋能裝置外筒 14.上端蓋 15.活塞桿16.外殼 17.電能管理模塊 18.永磁環 19.導線20.滾珠絲杠饋能線圈 21.絲杠螺母 22.軸承23.滾珠絲杠 24.彈簧圖2 饋能磁流變減振器系統結構示意圖Fig.2 Schematic diagram of energy regenerative magnetorheological shock absorber system
2 饋能磁流變半主動懸架系統數學模型
2.1 饋能磁流變減振器力學模型
磁流變液力學特性采用Bingham本構模型如下:
(1)
式中,τ—— 剪切應力
τy—— 剪切屈服應力
η—— 動力黏度
sgn —— 符號函數,表示活塞運動時的速度方向
如圖3為工作時的活塞桿受力情況。從圖中可知活塞桿在運動時受到了環形阻尼通道的作用力F1,導向器小孔的作用力F2,彈簧對活塞桿的作用力F3,以及滾珠絲杠對螺母的軸向力F4。
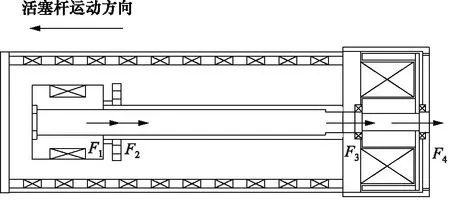
圖3 活塞桿受力示意圖Fig.3 Schematic representation of piston rod force bearing
饋能磁流變減振器的阻尼力模型表示為:

(2)
式中,x,v,a—— 分別為活塞運動的相對位移、相對速度以及相對加速度
L—— 阻尼通道的長度
b—— 通道寬度
h—— 磁流變減振器的阻尼通道間隙
AP—— 活塞有效面積
Cq—— 小孔流量系數,取0.82
Ak—— 導向器橫截面的有效面積
A—— 單個小孔流通面積
ρ—— 液體密度
m—— 小孔的個數
kk—— 彈簧系數
Ds—— 絲杠活塞直徑
D1—— 活塞桿直徑
D4—— 工作筒內徑
κ—— 發電裝置發電系數
M—— 發電裝置轉子轉動慣量
l—— 絲杠導程
n—— 傳遞效率
在頻率為2 Hz,振幅為25 mm的正弦激勵下,輸入0, 0.2, 0.4, 0.6, 0.8, 1 A的勵磁電流,饋能磁流變減振器的力學特性如圖4所示。
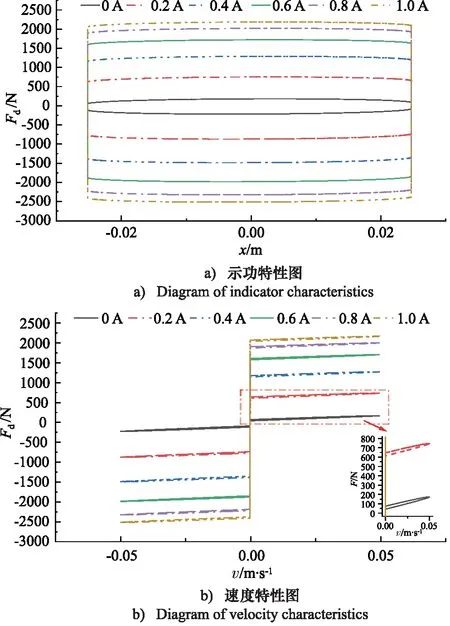
圖4 饋能磁流變減振器阻尼力特征Fig.4 Damping force characteristics of energy regenerative magnetorheological shock absorber
從圖4可見,饋能磁流變減振器的阻尼力在220~2500 N范圍內變化,能夠滿足饋能磁流變減振器的減振要求。
2.2 饋能磁流變減振器饋能模型
饋能磁流變減振器的饋能模型分為直線饋能和滾珠絲杠饋能兩部分。
直線饋能部分饋能功率可表示為[14]:
(3)
式中,N—— 發電線圈的匝數
E—— 直線饋能部分的感應電動勢
φg—— 軸向方向氣隙內的磁通量
ι—— 直線饋能部分的磁極距
x1—— 動子運動位移
v1—— 動子的運動速度
R—— 直線饋能發電線圈的電阻
R1—— 活塞勵磁線圈的電阻
滾珠絲杠饋能部分采用三相交流電磁能量轉換器。滾珠絲杠饋能部分輸饋能功率可表示為[15]:
(4)
式中,Uph—— 單相開路電壓
Uz—— 開路直流電壓
R2—— 滾珠絲杠饋能發電線圈的電阻
N1—— 繞于齒上單相的線圈數
B—— 間隙的平均磁通密度
Lm—— 動子軸軸向有效長度
vs—— 絲杠的軸向速度
D—— 轉子內徑
σ—— 磁漏系數
減振器回收總能量為:
(5)
路面輸入能量為:
(6)
式中,xt—— 非簧載質量位移
xr—— 路面激勵
kt—— 輪胎剛度
Ft—— 輪胎動載荷
T—— 工作時間
磁流變減振器饋能效率為:
(7)
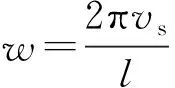
2.3 二自由度半主動懸架系統數學模型
二自由度半主動懸架系統數學模型如圖5所示。
圖5 二自由度半主動懸架系統數學模型Fig. 5 Mathematical model of two degrees of freedom semi-active suspension system
根據牛頓運動定律,可得:
(8)
(9)
式中,ms—— 簧載質量
mt—— 車輪質量
xs—— 簧載質量位移
xt—— 非簧載質量位移
xr—— 路面激勵
ks—— 彈簧剛度
kt—— 輪胎剛度
c0—— 零場阻尼
Fd—— 半主動控制力
令:
(10)
將式(2)和式(10)代入式(8)、式(9)可以轉化為:

(11)

(12)
3 模糊滑模控制器
3.1 滑模控制器的參考模型
為了同時提高車輛的平順性和操穩性,以混合天地棚阻尼控制模型作為參考模型[3],如圖6所示。
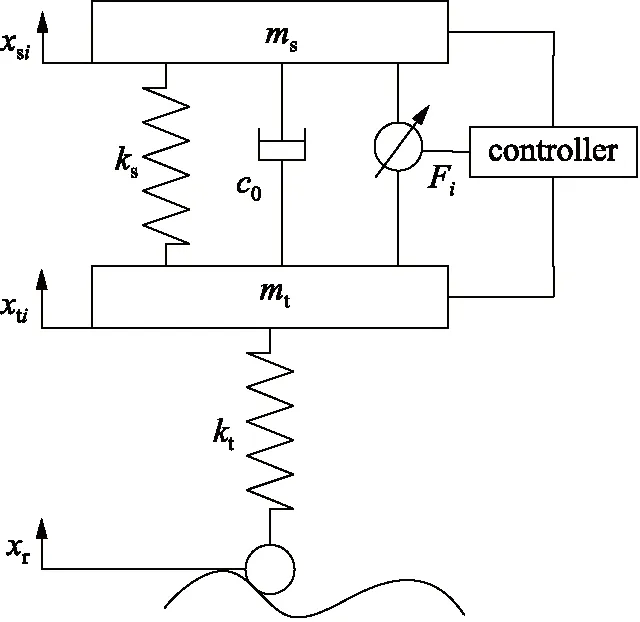
圖6 混合天地棚阻尼控制模型Fig.6 Damper control model of hybrid reference
根據牛頓運動定律,可得:

(13)

(14)
式中,xsi—— 簧載質量位移
xti—— 非簧載質量位移
Fi—— 半主動控制力
其中混合控制力表示為:
Fi=αFsk+(1-α)Fgr
(15)
式中,Fsk/Fgr—— 天棚/地棚阻尼控制力
α—— 加權系數,取值0.8
3.2 滑模控制器的設計
滑模控制器可以迫使實際系統在一定特性下沿著參考系統的狀態軌跡做小幅高頻的上下運動,即所謂的滑動模態。定義誤差矢量e為實際系統與參考系統的速度差、位移差以及位移差積分。
取變量:
(16)
誤差動力學方程為:

(17)
式中,A,B,E,G,H,I—— 系數矩陣
u—— 控制輸入
w—— 參考模型混合控制力輸入
v—— 干擾輸入(路面激勵輸入)
設計切換面函數為:
s=ce=c1e1+c2e2+c3e3
(18)
通常c3取1,可得滑動模態的運動微分方程:
(19)

根據式(17)和式(18)可得:

(20)
則輸出阻尼力u為:
(21)
ueq=-(cG)-1(cAe+cBX+cEX′+cHw+cIv)
(22)
由于實際模型受到外界干擾,為改善系統穩定性,采用等速趨近律來改善趨近效果:

(23)
式中,ε增益系數,表示系統運動點趨近切換面的速率。ε小,趨近速度慢;ε大,趨近速度較大,系統的抖動也較大。最終系統滑模控制的控制力u為:
u=ueq-(cG)-1εsgn(s)=ueq+usmc
(24)
式中,usmc—— 滑模控制補償力
系統的可變阻尼力為:
(25)
3.3 飽和函數
滑模控制魯棒性好、抗干擾能力強,可以很好地適應半主動懸架系統。但滑模控制在本質上的不連續開關特性會引起系統的抖振,為緩解這一問題,采用飽和函數替代符號函數[16],即:
(26)
式中,s—— 切換函數
Δ —— 邊界層,k=1/Δ
根據切換函數s的范圍,令Δ=0.02,進行仿真,由圖7可知,由于符號函數的不連續開關特性,使得滑模控制補償力usmc發生抖振現象,而使用飽和函數可以緩解這一現象,提高系統穩定性。
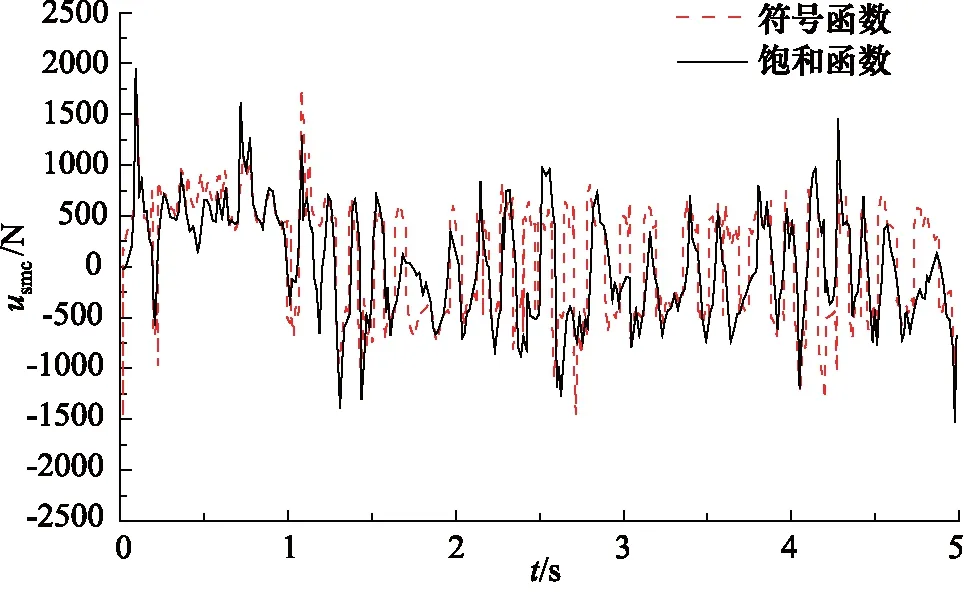
圖7 不同函數對滑模控制補償力的影響Fig.7 Influence of different functions on compensating force of sliding mode control
3.4 模糊滑模控制器
為進一步消除抖振,采用模糊控制優化滑模控制器。模糊控制基于人工經驗,不需要系統的準確模型,通過模糊控制規則的制定來實現非精確控制[10]。模糊控制通過調整滑模控制的邊界層來補償系統的不確定性,模糊控制與滑模控制相結合可有效緩解抖振的影響,改善系統穩定性,模糊滑模控制器如圖8所示。
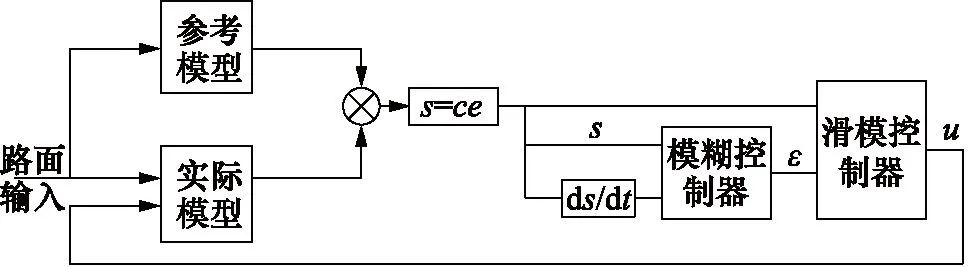
圖8 半主動懸架模糊滑模控制器的結構框圖Fig.8 Structural diagram of fuzzy sliding mode controller for semi-active suspension

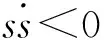
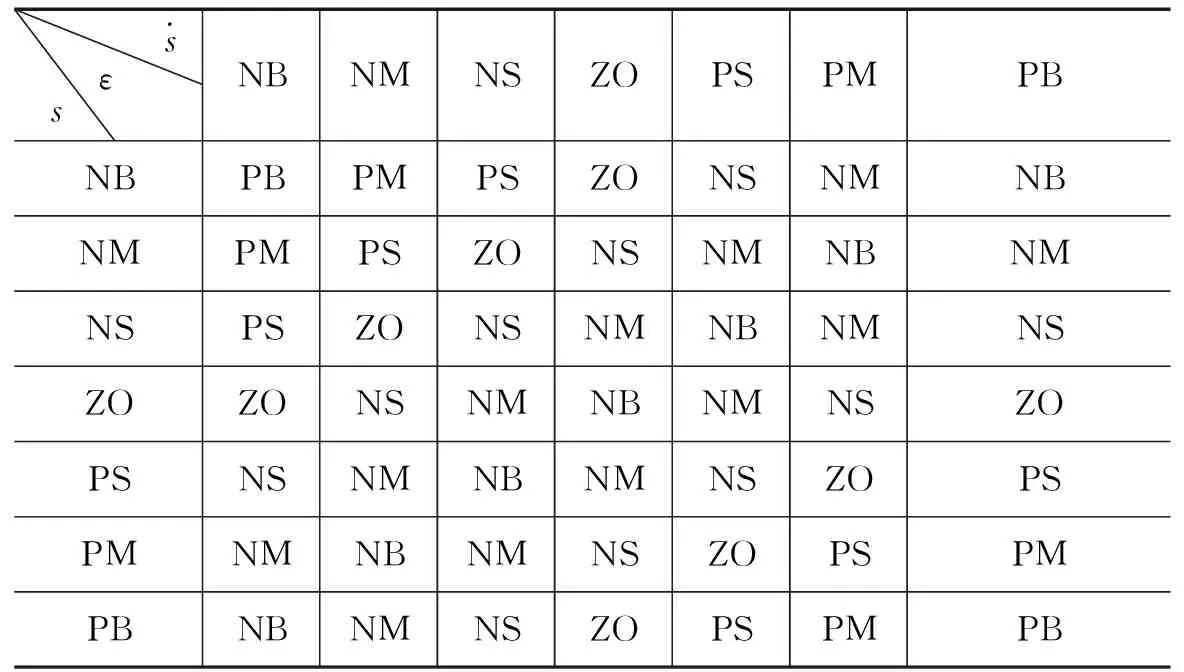
表1 模糊控制規則Tab.1 Fuzzy control rule
4 半主動懸架模糊滑模控制仿真
為驗證模糊滑模控制策略的有效性,在 Simulink中搭建模型,選用隨機路面作為輸入,隨機路面激勵采用諧波疊加法,基于諧波疊加法生成的路面激勵可表示為[1]:
(27)
式中,θk—— 在區間[0,2π]上生成的隨機數
Gxr(f) —— 時間頻率功率密度
m—— 將頻率區間[fmin,fmax]劃分成小區間的個數
fmid_k—— 每個小區間的中間值
Δfk—— 小區間的長度
取C級路面不平度系數Gxr=256×10-6m3,車速v=10 m/s,得到如圖9所示的諧波疊加法產生的隨機路面波形。表2為半主動懸架系統主要參數。
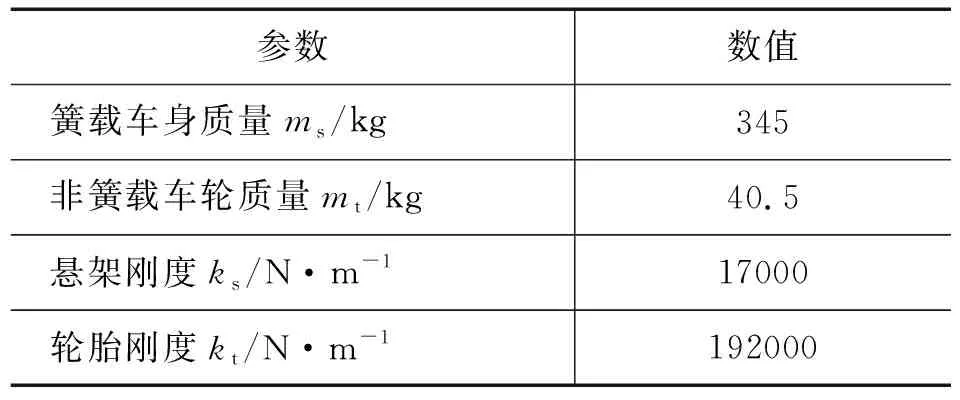
表2 半主動懸架系統主要參數Tab.2 Main parameters of semi-active suspension system

圖9 諧波疊加法產生的隨機路面波形Fig.9 Random road waveform generated by harmonic superposition method
為了分析模糊滑模控制半主動懸架的減振性能,對隨機路面激勵下的被動懸架,混合天地棚控制半主動懸架和模糊滑模控制半主動懸架進行對比仿真分析。圖10~圖12分別為該半主動懸架在不同控制策略下各性能曲線。從圖中可知,基于模糊滑模控制的半主動懸架相比被動懸架和基于混合天地棚控制的半主動懸架的減振性能有明顯改善。
圖10 車身加速度Fig.10 Body acceleration
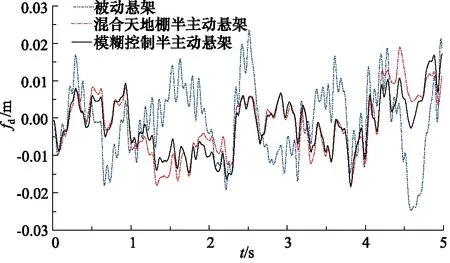
圖11 懸架動撓度Fig.11 Suspension dynamic deflection
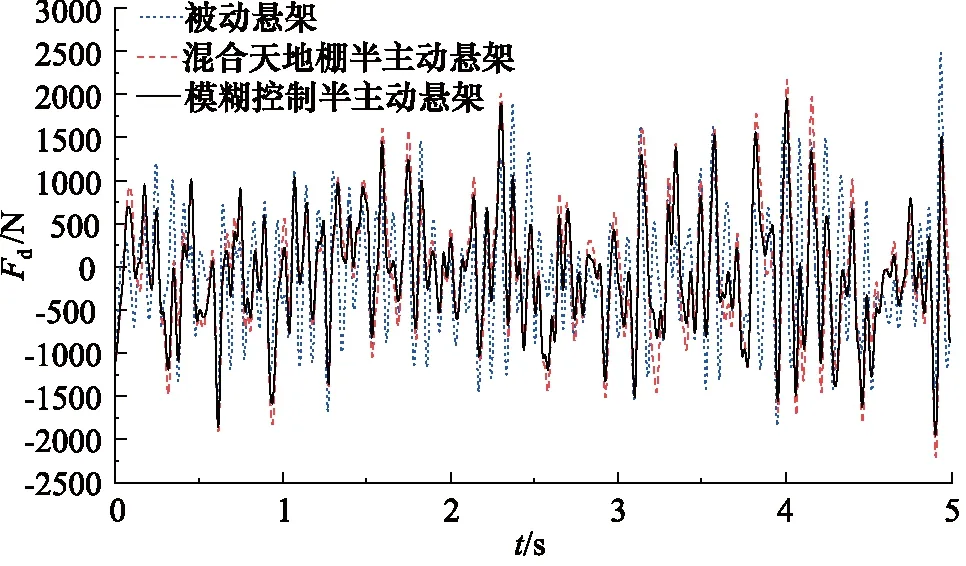
圖12 輪胎動載荷Fig.12 Tire dynamic load
表3為懸架在不同控制下的各項動力學性能指標的均方根值。由表3可知,在隨機路面激勵下,基于模糊滑模控制的半主動懸架的車身加速度、懸架動撓度和輪胎動載荷的均方根值相比于被動懸架和基于混合天地棚控制的半主動懸架分別降低了21.85%,56.19%,55.42%和40.20%,33.3%,48.67%,表明了該半主動懸架在模糊滑模控制下具有更好的減振性能。
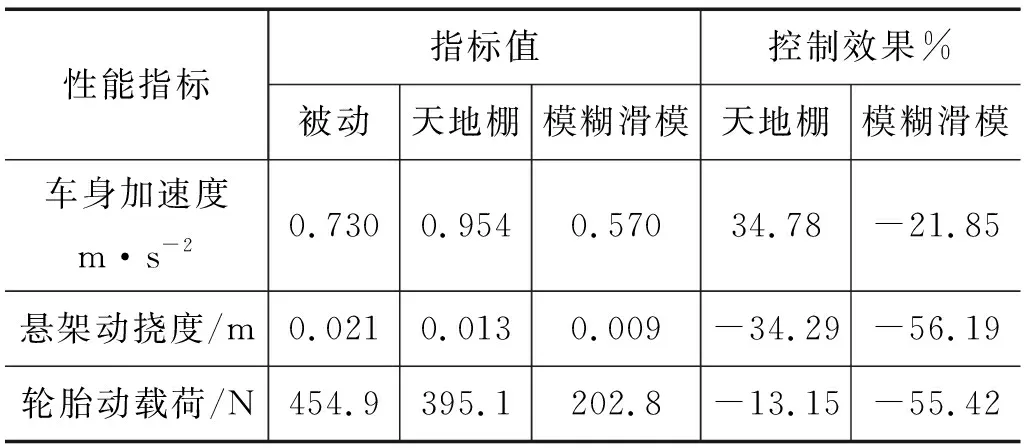
表3 隨機路面下不同控制半主動懸架性能指標及控制效果Tab.3 Performance index and control effect of different control semi-active suspension on random road surface
為了分析模糊滑模控制半主動懸架的饋能性能,在隨機路面激勵下,對混合天地棚控制半主動懸架和模糊滑模控制半主動懸架進行對比仿真分析。圖13~圖17為該半主動懸架在不同控制策略下的各項饋能相關曲線。其中懸架總能量為懸架饋能能量與耗能能量之差。
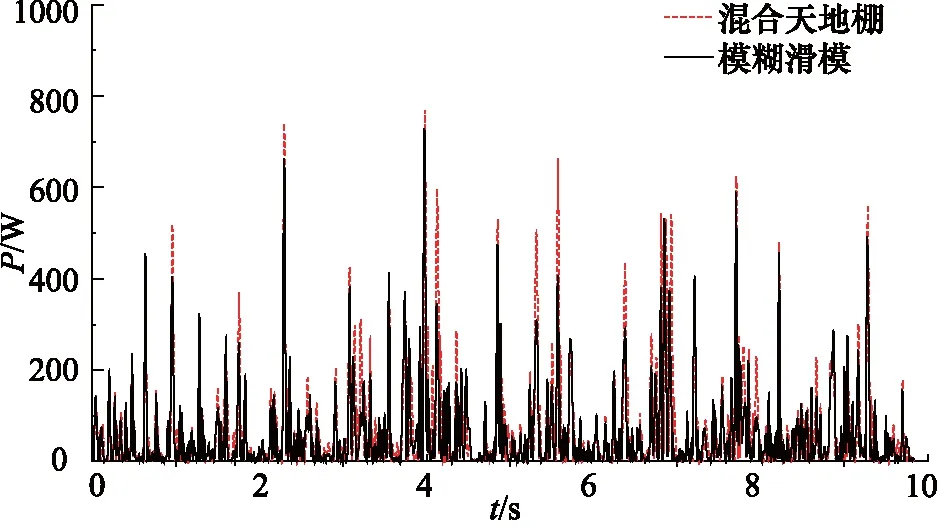
圖13 不同控制下的路面輸入功率Fig.13 Road input power under different control
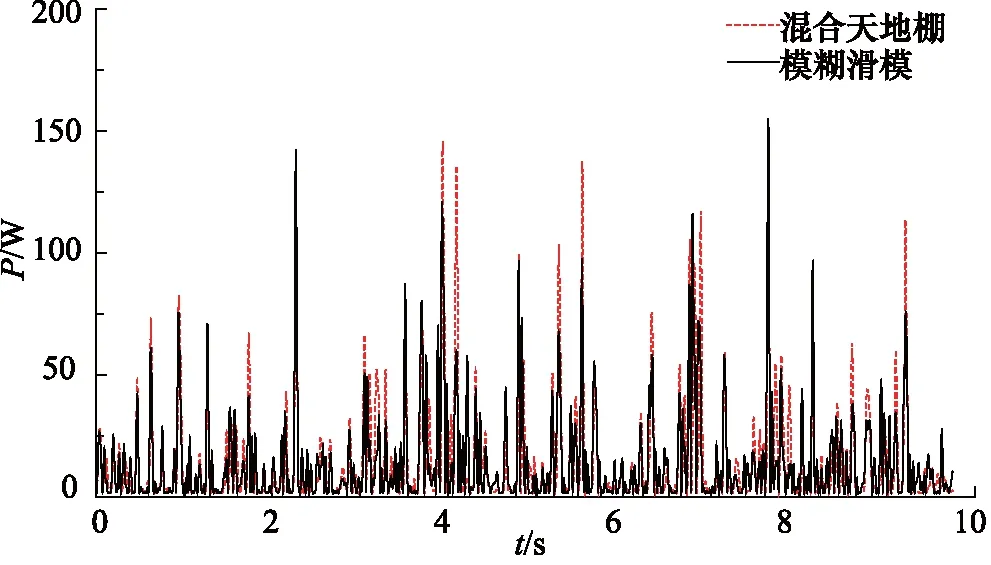
圖14 不同控制下的饋能功率Fig.14 Energy regenerative power under different controls

圖15 不同控制下的饋能效率Fig.15 Energy regenerative efficiency under different control
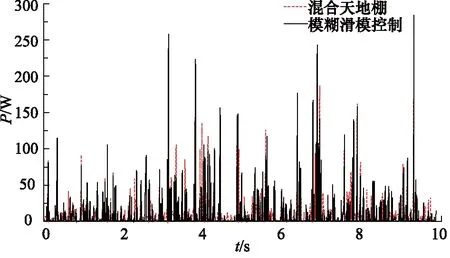
圖16 不同控制下的耗能功率Fig.16 Power dissipation under different controls
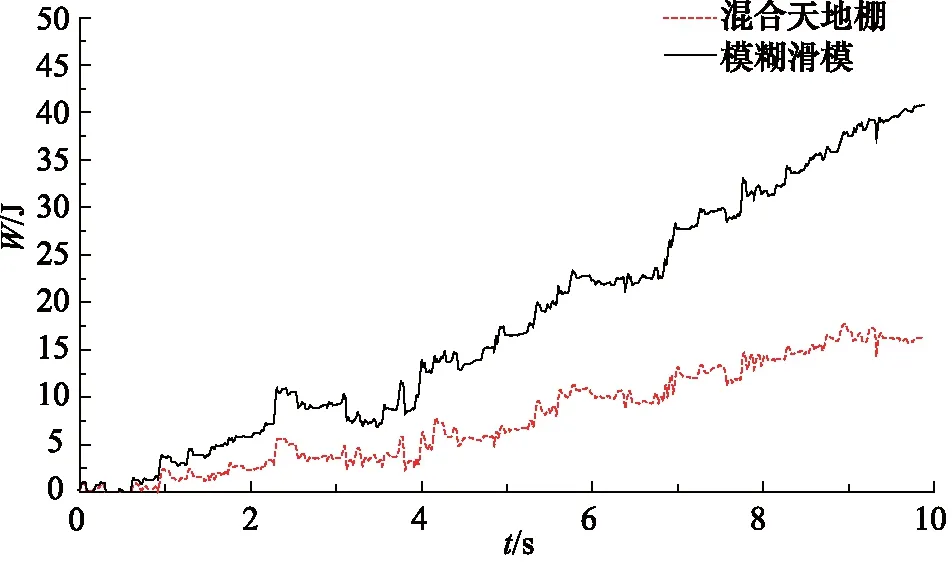
圖17 不同控制下的懸架系統總能量Fig.17 Total energy of suspension system under different control
由圖和表4可知,基于模糊滑模控制的半主動懸架相對于基于混合天地棚控制的半主動懸架耗能更小,饋能效率更高。該半主動懸架系統總能量大于零,說明該懸架在滿足自身能耗的同時能夠實現對外輸出電能,滿足了懸架饋能的設計初心,驗證了該懸架的可行性,為進一步研究奠定了基礎。
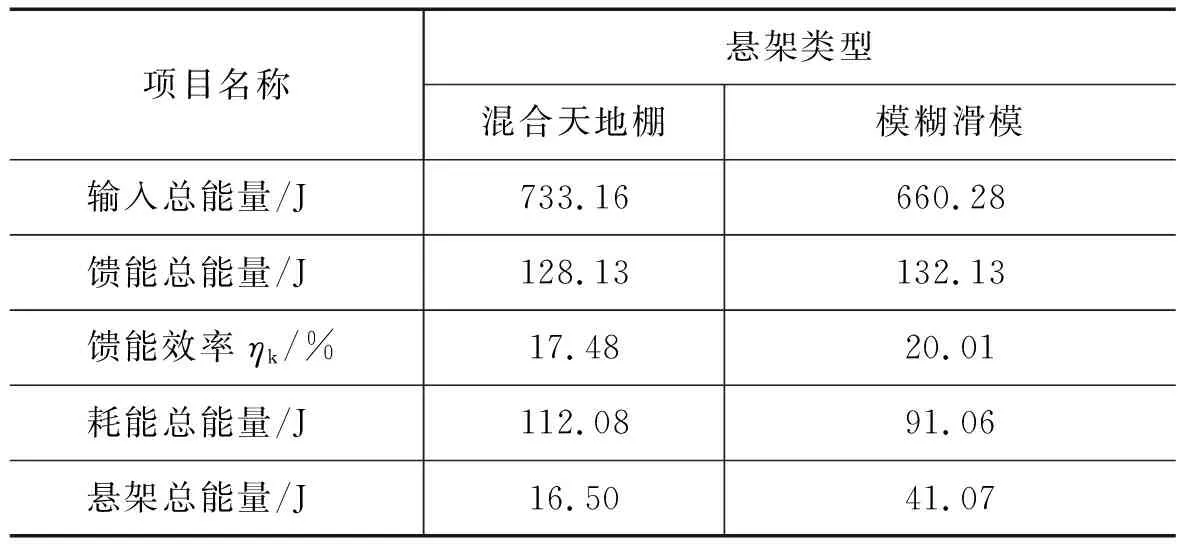
表4 不同控制下懸架的饋能特征Tab.4 Energy regenerative characteristics of suspension under different control
5 結論
(1) 針對單筒減振器需做體積補償的特點,提出了一種基于直線饋能和滾珠絲杠饋能相結合的新型單筒饋能磁流變減振器的結構,說明其工作原理,建立了相應的力學模型和饋能模型,及二自由度半主動懸架系統數學模型;
(2) 以混合天地棚阻尼控制系統為參考模型,設計滑模控制器,為緩解系統抖振,使用飽和函數代替符號函數,并運用模糊控制優化滑模控制器,改善系統穩定性;
(3) 用諧波疊加法生成路面激勵輸入,分別對被動懸架,基于混合天地棚阻尼控制和基于模糊滑模控制的半主動懸架進行對比仿真。結果表明,基于模糊滑模控制的半主動懸架減振性能更好,能耗更小,且有良好的饋能性能,驗證了饋能磁流變減振器結構的可行性和模糊滑模控制策略的有效性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
