基于STM32的全自動病理染色控制系統的設計與實現
2022-09-13 07:43:00譚鑫平林成旭李雪梅廖廣蘭劉智勇
工程設計學報 2022年4期
關鍵詞:系統
譚鑫平,甘 浪,林成旭,李雪梅,李 倩,閆 旺,陳 剛,廖廣蘭,劉智勇
(1.華中科技大學機械科學與工程學院,湖北 武漢 430074;2.武漢康錄生物技術股份有限公司,湖北 武漢 430000)
病理染色技術應用于細胞觀察和病理分析中,對疾病的診斷有著關鍵的作用[1-2]。FISH(fluorescence in situ hybridization,熒光原位雜交)染色是一種以 DAPI(4',6-Diamidino-2-phenylindole dihydrochloride,4',6-二脒基-2-苯基吲哚)作為熒光染料的病理檢測技術,常被用于檢測細胞是否凋亡,并在癌細胞診斷、腫瘤檢測與治療中得到廣泛應用[3]。
傳統的手工病理切片染色須耗費人力和物力,且存在周期長、操作繁瑣等缺點,不適用于對大量樣本的染色[4-5];同時,染色過程中的操作失誤和環境變化也會對染色結果產生影響。在機電一體化技術不斷發展的背景下,自動化病理染色系統應運而生。然而,目前國內的自動化病理染色技術還不成熟,FISH染色的全自動化水平不高。如廈門通靈生物醫藥科技有限公司推出的Aliya自動免疫組化染色儀,只能實現烤片、脫蠟等部分FISH染色功能。國外自動染色系統的價格昂貴,而采用國產自動化染色機進行FISH染色時可能出現多種問題而導致臨床診斷出現失誤[6-10],比如:在染色過程中會出現試劑少滴、多滴或未滴的情況,導致染色效果不佳;在加下一試劑時,上一次滴加的試劑未完全去除而產生弱染色;染色劑滴加位置產生偏差,導致染色不均勻。究其原因,是染色控制系統存在諸多缺陷。
因此,筆者面向FISH染色技術,以全自動病理染色控制系統為研究對象,針對當前自動化染色技術存在的缺陷與不足,利用Keil5開發系統、QT和Microsoft Visual Studio開發軟件,基于STM32和GUI(graphical user interface,圖形用戶界面)開展染色控制系統的優化設計與實現,解決自動染色控制系統存在的關鍵問題,研發高效率、高魯棒性、高度集成化的染色控制系統,以提高病理染色的質量和效率。
1 染色控制系統組成
染色控制系統包括指令控制系統、執行控制系統和電源模塊三大部分,如圖1所示。指令控制系統由上位機和下位機組成,其根據用戶選擇生成控制指令。執行控制系統包括運動控制模塊、傳感反饋模塊、溫度控制模塊、繼電器模塊和故障報警模塊,各模塊分別與上位機或下位機直接連接。其中:運動控制模塊實現對電機、蠕動泵、注射泵運動的控制;傳感反饋模塊采用下位機反饋與多種傳感器監測相結合的模式,實現對系統開機狀態、啟停狀態、運行時間、剩余時間、運行步驟、空腔溫度及濕度、串口連接狀態、電機狀態等的實時監測。上位機、下位機和執行控制系統之間通過有線連接的方式進行通信。
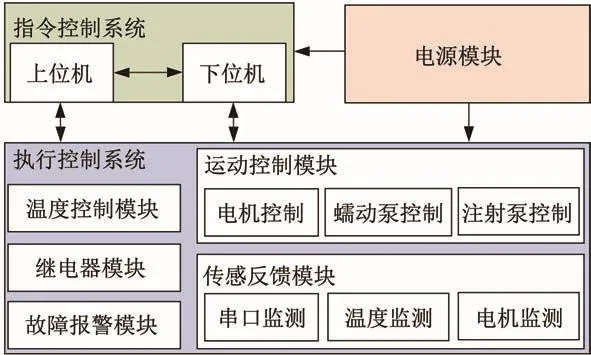
圖1 染色控制系統組成Fig.1 Composition of staining control system
2 染色控制系統硬件設計
2.1 STM32F103ZET6
為了滿足染色控制系統響應快速和功耗低的要求,選用意法半導體有限公司(ST Microelectronics)生產的STM32F103ZET6單片微型計算機作為下位機控制器。這種嵌入式單片機采用32位CM3作為內核處理器[11],其芯片采用最佳代碼密度,具有可預見的運行時間和改進的調試功能,能夠在低動態功耗下實現高性能。該單片機的I/O(input/output,輸入/輸出)口多達112個,一共具有8個定時器[12-13];另外,開發板不僅板載了一組3.3 V和一組5 V的電源輸出,還有一個適合DC 6~24 V輸入的外部電源輸入口來保證5 V電源的穩定性。單片機提供USB(universal serial bus,通用串行總線)串口、電源接口和數字/模擬組合接口等10多種接口,能夠滿足復雜控制系統的需求。
2.2 傳感系統設計
本研究中,傳感系統主要包括氣泡傳感器、光電開關、光纖傳感器和氣體壓力傳感器等傳感器件。
氣泡傳感器用于檢測蠕動泵運轉是否正常。選用美國泰科電子有限公司的AD-101超聲波氣泡傳感器,其響應時間為0.22 ms,工作溫度范圍為0~40℃,輸出3.3 V的TTL(transistor-transistor logic,晶體管-晶體管邏輯)電平信號。
光電開關用于電機初始位置校準。選用日本Panasonic公司的PM-L25光學傳感器,其檢測間距為6 mm,重復精度可達0.1 mm,反應時間小于80 μs,工作溫度范圍為-25~55℃。
光纖傳感器用于檢測移液槍頭是否提取成功。選用惠州博得公司的漫反射光纖傳感器,其反應時間為400 μs,消耗電流在400 mA以下,工作溫度范圍為-10~55℃。
氣體壓力傳感器用于檢測蓋玻片是否提取成功。選用風啟電子科技有限公司的XGZP6847A氣體壓力傳感器,其測壓范圍為-100~0 kPa,工作溫度范圍為-20~100℃。
2.3 主電路設計
采用平板電腦作為上位機,型號為Surface Go 2,其配置如下:CPU為Intel(R)Pentium(R)Gold Processor 4425Y@1.70 GHz;GPU 為 Intel(R)UHD Graphics 615;內存容量為4 GB,存儲容量為128 GB;操作系統為Windows 10。為了實現電機、蠕動泵、注射泵等部件的協調運動,設計了以STM32為核心的主電路。其包括電腦與STM32之間的串口通信電路、STM32與運動部件(M1至M6)之間的驅動電路和電源與STM32電源控制器(power controller,PWR)之間的外圍電路。主電路連接如圖2所示。
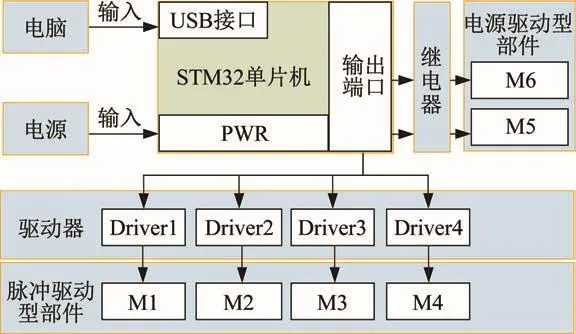
圖2 染色控制系統主電路連接示意Fig.2 Main circuit connection schematic of staining control system
運動部件主要包括伺服電機(M1)、直線電機(M2)、蠕動泵(M3)、微量注射泵(M4)、真空泵(M5)和氣泵(M6)。M1選用雷賽智能控制股份有限公司的42CME08伺服電機;M2選用寧波格特威電機有限公司的11HY3401-25D52型直線步進電機;M3選用卡默爾流體科技(上海)有限公司的KCS-SA-A-B166蠕動泵;M4選用美國TRICONTINENT公司的Air-Z Legacy微量注射泵;M5和M6分別選用德國THOMAS公司的1410隔膜真空泵和6015SE氣泵。主要運動部件的參數如表1所示。Driver1至Driver4為驅動器,除與電機或泵配套的驅動器外,其余驅動器選用德軒電機有限公司的DM420驅動器。

表1 染色控制系統主要運動部件的參數Table 1 Parameters of main moving parts of staining control system
多個伺服電機與直線電機的配合運動使機械部件達到預定位置。利用蠕動泵實現染色過程中試劑滴加功能。對于體積精度要求較高的微量試劑,則利用高精度微量注射泵實現對試劑量的精確控制,以避免試劑量誤差對染色效果的影響。利用真空泵實現蓋玻片的吸取,避免在高溫下試劑揮發,充分保證試劑與樣本反應,以保證染色效果。利用氣泵對殘留試劑進行清除,以避免弱染色。
3 染色控制系統軟件設計
3.1 下位機軟件設計
以STM32F103ZET6為核心的下位機包括中央處理器(central processing unit,CPU)、通信模塊、中斷模塊、時鐘模塊和I/O模塊,如圖3所示。STM32的通信模式有串行和并行兩種,不同的串口有不同的I/O引腳配置,上位機傳輸的數據經過轉換后被下位機接收;中斷模塊用來處理主程序以外的異常情況,初始化時須設置中斷的搶占優先級和響應優先級,產生中斷時進入中斷服務函數進行事件處理;時鐘模塊在一定的時鐘頻率下通過裝載計數的方式實現定時器功能,在初始化時須進行時鐘使能和預分頻設置;I/O模塊通過端口使能和工作模式設置配置引腳功能,引腳除了作為普通I/O端口使用外,還具有復用和重映射功能。通信模塊與中斷模塊共同負責下位機與上位機之間的通信,時鐘模塊負責設置外設所需要的時鐘頻率,I/O模塊通過控制引腳信號或脈沖的輸入輸出來控制執行部件的運動。
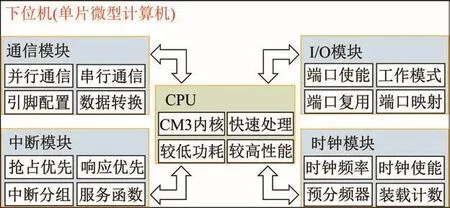
圖3 下位機模塊構成Fig.3 Module composition of lower computer
染色控制系統的執行部件主要有2種驅動方式:脈沖驅動和電源直接驅動。脈沖驅動方式是指在相應的硬件連接下,單片機輸出有一定規律的脈沖就能使執行部件工作的驅動方式。系統中M1、M2、M3、M4的驅動方式為脈沖驅動,其運動方向由方向控制信號的電平高低決定。電源直接驅動方式是指將執行部件連上電源就能使其工作的驅動方式,其通過設置單片機電平引腳的高低電平控制繼電器的通斷來實現執行部件的啟停控制。系統中M5和M6由電源直接驅動。在硬件連接的基礎上,通過單片機的脈沖引腳和電平引腳控制執行部件的運動。STM32 I/O模塊的引腳分配如表2所示。
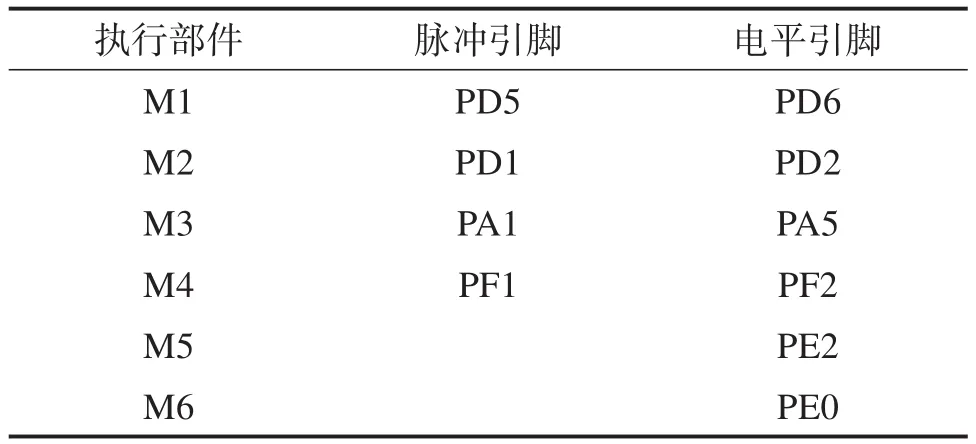
表2 STM32 I/O模塊的引腳分配Table 2 Pin assignment of STM32 I/O module
在Keil5開發系統中,采用C語言編寫執行部件運動控制程序,經編譯后用FlyMcu軟件燒錄至STM32開發板。系統上電后,單片機首先進行初始化,包括使能時鐘、設置端口模式、配置串口中斷等;隨后,控制系統實現自動復位,并等候上位機發出運動指令;待控制系統收到上位機發出的運動指令后,單片機控制執行部件作出相應的運動來完成全自動病理染色工作。下位機程序流程框圖如圖4所示。
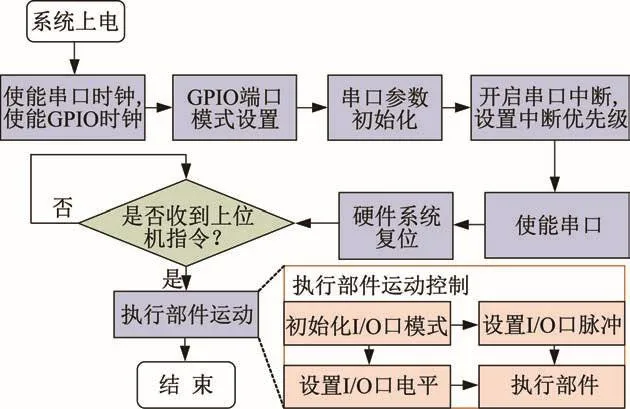
圖4 下位機程序流程框圖Fig.4 Program flow chart of lower computer
3.2 上位機軟件設計
上位機包括GUI、顯示單元、人機交互單元、邏輯處理單元和通信單元,如圖5所示。GUI由文本框、分組框、菜單欄和工具欄等組成;顯示單元實現圖形、圖像、文本和文件的顯示;人機交互單元通過按鈕、編輯框、單選框和下拉框等控件實現人機直接交互;邏輯處理單元在讀取數據后對數據進行處理,也能實現文件加載和API(application programming interface,應用程序接口)調用;通信單元根據通信協議進行串口配置,從而實現數據的發送和接收。GUI、顯示單元和人機交互單元共同實現人機交互功能,邏輯處理單元用以保存和處理用戶數據,通信單元完成上位機與下位機、溫度控制模塊之間的通信。
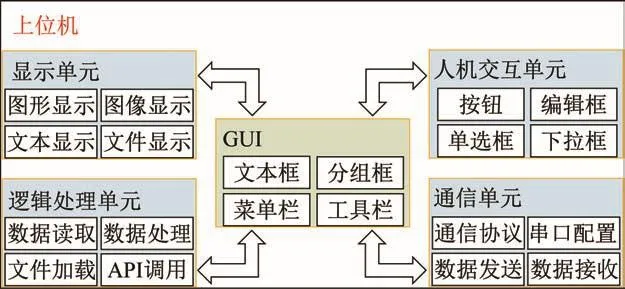
圖5 上位機模塊構成Fig.5 Module composition of upper computer
完整的染色過程分為以下11個步驟:烤片、脫蠟、洗滌、通透、水處理、酶處理、乙醇處理、變性、雜交、洗滌和染色[14-16]。每一個步驟所需試劑及時間如表3所示。為了提高染色系統的工作效率,系統應能對多塊載玻片上的切片同時進行處理。另外,考慮實際染色情況,某些切片可能只需要其中幾個步驟。
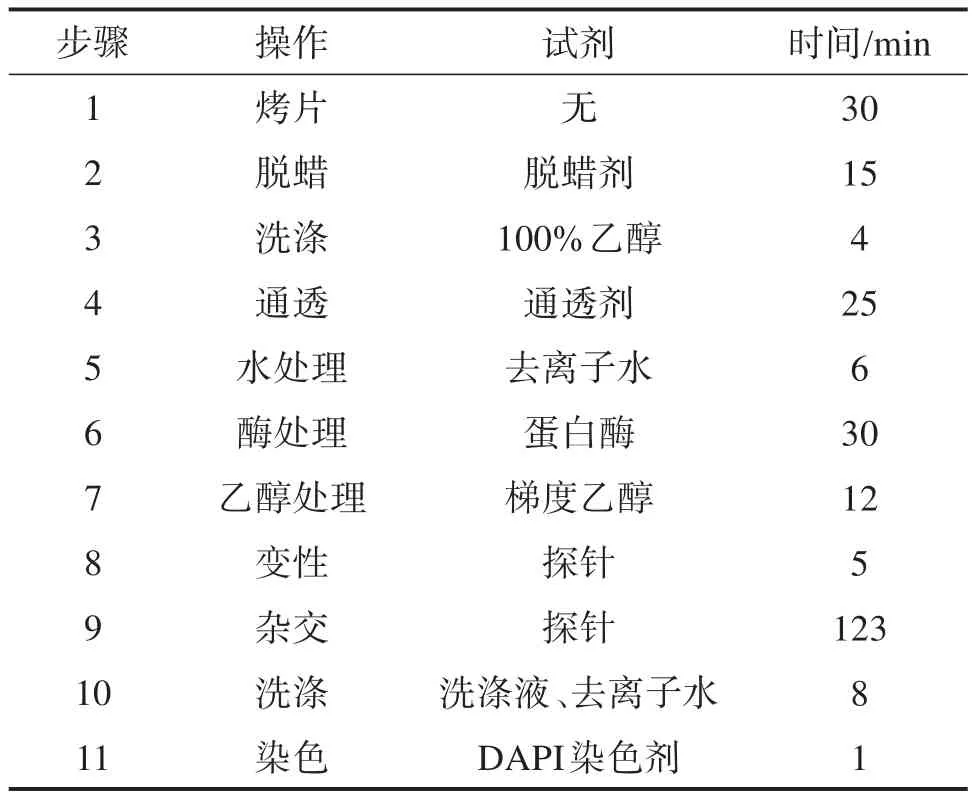
表3 面向FISH染色的全自動病理染色系統的染色步驟Table 3 Staining steps of fully automatic pathological staining system for FISH staining
根據控制要求設計人機交互界面。在MicrosoftVisual Studio軟件中添加QT庫,采用QT Designer Version 5.13.0設計GUI界面,在Microsoft Visual Studio 2017開發環境中采用C++語言進行界面程序編寫。所開發的染色控制系統的GUI界面如圖6所示。該系統可以控制12塊切片的染色過程,配置了3種染色模式,每種模式對應不同切片類型的染色流程。通過點擊主窗口上方代表載玻片位置的數字按鈕選擇每一塊載玻片上樣本的執行模式,在復選框選擇試劑類型,利用中心表格和剩余時間顯示當前系統的運行進度。染色過程中通透劑和蛋白酶的反應時間、雜交和變性的溫度和時間可以進行設置,其他步驟的溫度和時間是固定的。

圖6 染色控制系統GUI界面Fig.6 GUI interface of staining control system
用戶通過鼠標和鍵盤設置染色系統的執行步驟,界面控件狀態用底層數據記錄。控件主要包括按鈕(PushBotton)、分 組 框(GroupBox)、文 本 框(Label)、菜單欄(MenuBar)、編輯框(LineEdit)和復選框(ComboBox),在C++程序中定義狀態變量來記錄控件狀態。界面狀態變量及其事件、設定值如表4所示。
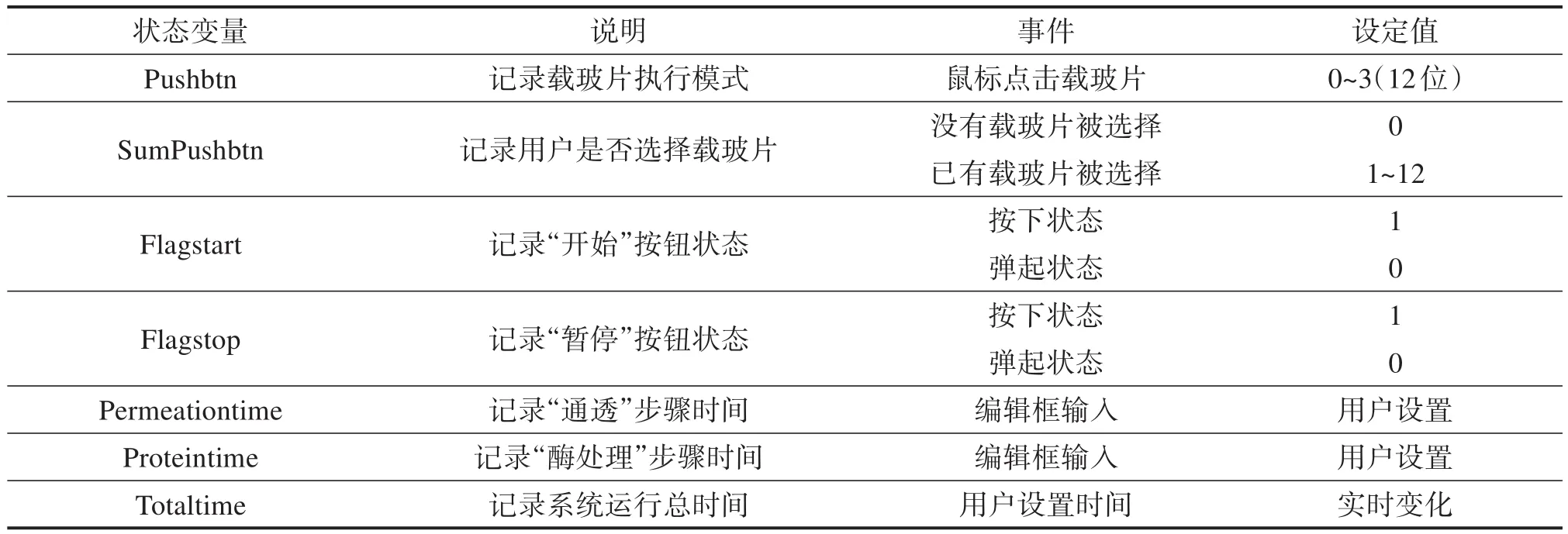
表4 界面狀態變量及其事件、設定值Table 4 Interface state variables and their events and set values
上位機通信單元通過USB數據線分別與STM32開發板和溫度控制模塊進行實時通信,并分別定義通信協議。上位機與開發板之間遵循USART(universal synchronous/asynchronous receiver/transmitter,通用同步/異步串行接收/發送器)串口通信協議,由上位機傳輸給開發板的數據通過輸入移位寄存器后存至輸入數據緩沖器,再由MCU(micro control unit,微控制單元)內核處理。上位機與溫度控制模塊之間采用Modbus通信協議,采用RS485接口標準,上位機傳輸數據格式為1個起始位、無校驗位、2個停止位,數據傳輸速率為9 600 bit/s。GUI界面的相關設置數據通過T口USB數據線由電腦發送給STM32開發板從而控制執行部件的運動,界面將所需溫度傳輸給溫度控制模塊以控制試劑反應溫度;在運行過程中,系統當前狀態和當前溫度也實時反饋給上位機。通信內容及STM32數據傳輸過程如圖7所示。
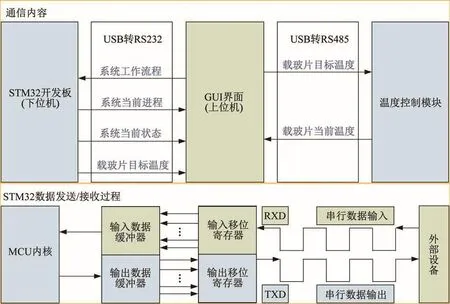
圖7 通信內容及STM32數據傳輸過程Fig.7 Communication content and STM32 data transmission process
系統當前狀態通過多傳感器監測,下位機獲取傳感器信號后將其傳輸給上位機。上位機得到多源信息數據后利用并聯融合的功能結構及決策層融合的方式進行多傳感信息融合。融合流程如圖8所示。首先,系統通過處理每個傳感器的原始信號得出各監測對象的特征和屬性,包括蠕動泵狀態電機狀態、槍頭狀態和蓋玻片狀態等;然后,將所有的屬性判別結果進行關聯分析得到系統當前狀態;最后,根據融合結果對系統運行作出決策。該融合方式使得系統實時性好[17-20]、抗干擾能力強,且具有很好的靈活性。
4 全自動病理染色實驗及其結果分析
根據FISH染色需求設計并開發了全自動病理染色系統。其模型渲染圖及結構實物圖如圖9所示。系統長為850 mm,寬為500 mm,高為540 mm,凈重60 kg;主要由X、Y、Z三軸運動模塊、切片預處理模塊、微量試劑滴加模塊、密封模塊和加熱模塊等構成。系統可同時完成12個樣本的FISH染色,溫控范圍為室溫至110℃,溫控精度為±1℃,可以在2 min內從37℃升溫至95℃。
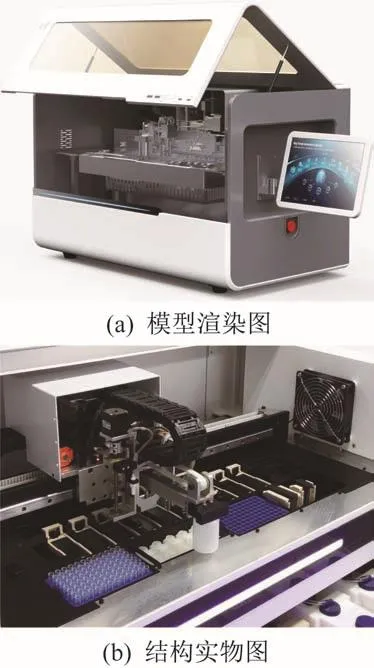
圖9 全自動病理染色系統模型渲染圖及結構實物圖Fig.9 Model rendering diagram and physical structure diagram of fully automatic pathological staining system
利用所研發的全自動病理染色系統進行實驗。在通透25 min、酶處理30 min、變性85℃-5 min和雜交42℃-2 h的條件下進行單片組織樣本染色實驗。人機交互時間為55 s,整個流程運行時間為281 min,其中試劑反應時間占比為92.17%,機械運動時間占比為7.83%。實驗中通過測量可知,滴加試劑的位置精度達到0.05 mm,試劑體積精度達到0.6 μL,在蓋玻片作用下試劑對樣本的覆蓋率達到93%以上,氣泵處理后試劑殘留小于50 μL,設備故障響應時間小于0.5 s。實驗完成后將樣本置于熒光顯微鏡下觀察,得到的熒光圖像如圖10所示。由圖可知,熒光圖像的對比度高,信號點明顯,細胞邊界清晰,染色均勻,達到了病理判讀的要求。在不同溫濕度環境下對不同樣本進行多次染色實驗后可知,設備運行故障率小于3%,滴加試劑類型的準確率為100%,且染色效果良好,圖像可判讀率達到90%以上。
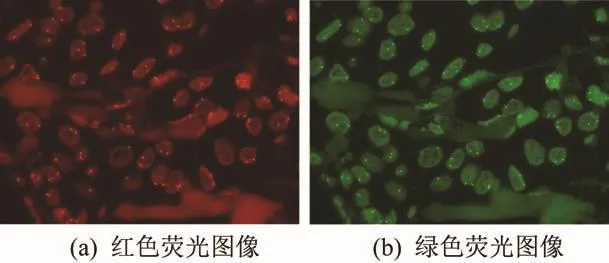
圖10 實驗所得的熒光圖像Fig.10 Fluorescence images obtained from experiments
實驗結果表明,所研發的全自動病理染色控制系統能夠實現多樣本FISH染色的全自動化過程控制。該控制系統采用有線傳輸方式實現了上位機、下位機與執行控制系統三者之間的有效通信,保證了數據傳輸的穩定性。采用多傳感器融合的傳感反饋模塊實時監控系統運行狀態,有效提升了系統魯棒性和病理染色質量。選擇STM32F103ZET6單片微型計算機作為下位機控制器,設計了控制系統主電路及輔助電路,實現了多個執行部件在互不干擾狀態下的協調運動,提高了系統穩定性。選用高精度伺服電機和微量注射泵用于試劑的提取與滴加,結合傳感反饋模塊保證了試劑量的準確性,有效避免了弱染色和染色不均的情況,保證了染色效果。基于QT開發軟件和Microsoft Visual Studio開發環境設計了上位機人機交互GUI界面,采用C++狀態變量記錄用戶操作,通過優化染色模式選擇方案節約了人機交互時間成本。利用該控制系統能夠一次性實現12個樣本的FISH染色全自動化,且可以同時處理不同類型的樣本,極大地提升了染色效率,同時避免了手工染色中的環境干擾因素,進一步提升了染色質量。
將所研發的全自動病理染色系統與市場上已有的FISH自動染色系統進行比較,相關參數對比如表5所示。可以看出,相較于已有的染色系統,本系統在整機尺寸、質量、溫度范圍、升溫速度、溫控精度和自動化程度等方面具有一定優勢。
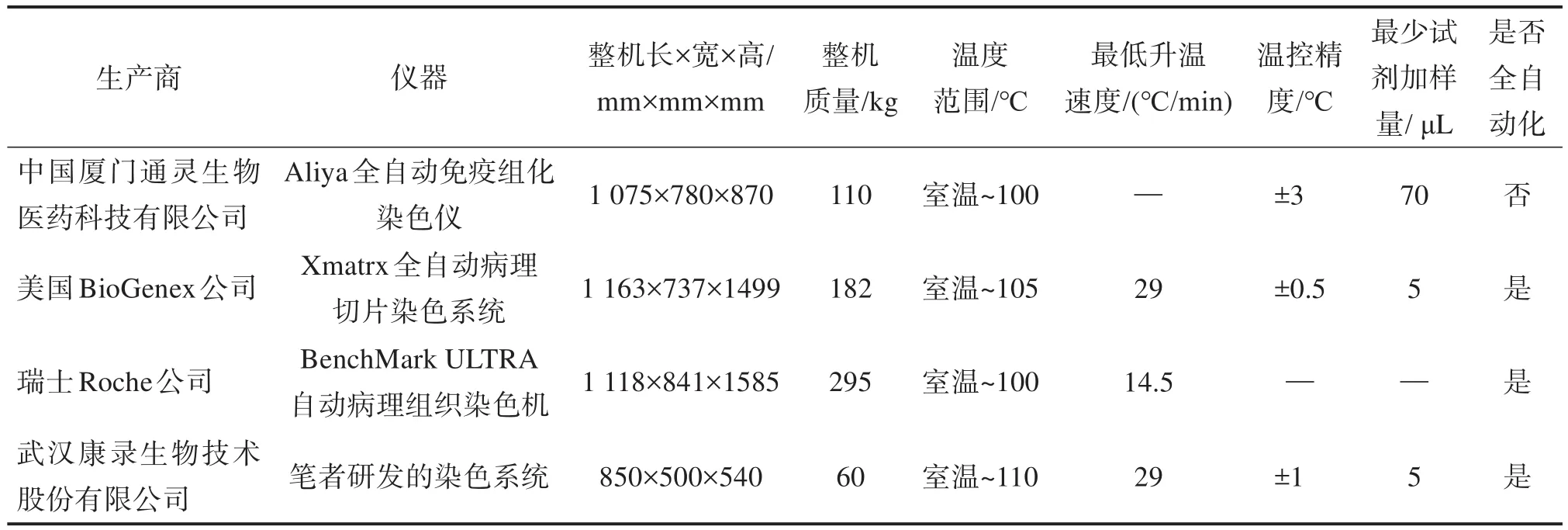
表5 所研發的全自動病理染色系統與已有自動化染色系統的參數對比Table 5 Parameter comparison between the fully automatic pathological staining system developed and the existing automated staining system
5 結語
面向FISH染色技術,利用Keil5和Microsoft Visual Studio 2017開發環境,采用C語言和C++語言開發了基于STM32和GUI的全自動病理染色控制系統,取得了以下良好效果:
1)所研發的病理染色控制系統能夠實現對多樣本FISH染色過程的全自動化控制,且控制系統具有高穩定性、高精度和良好的魯棒性。
2)采用傳感反饋模塊實現對染色過程的實時監測,結合伺服電機和高精度注射泵能夠在防止環境干擾的前提下保證試劑量的精準度,有效避免了染色不均和弱染色現象,提升了病理染色質量。
3)所設計的GUI人機交互界面能夠在實現相關參數設置的前提下節約人機交互成本,方便用戶操作,體現了人機工程相關理念。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32