旋翼翼型高速風(fēng)洞動態(tài)試驗裝置研制
2022-09-13 07:43:26張衛(wèi)國李國強宋奎輝趙亮亮
工程設(shè)計學(xué)報 2022年4期
關(guān)鍵詞:模型
張衛(wèi)國,李國強,宋奎輝,閻 旭,趙亮亮
(1.西北工業(yè)大學(xué)航空學(xué)院,陜西 西安 710072;2.國防科技大學(xué)空天科學(xué)學(xué)院,湖南 長沙 410073;3.中國空氣動力研究與發(fā)展中心低速空氣動力研究所,四川 綿陽 621000;4.四川同人精工科技有限公司,四川 綿陽 621000)
直升機憑借垂直起降、懸停等優(yōu)勢,在民用和軍用領(lǐng)域被廣泛應(yīng)用。但在高速前飛和機動飛行狀態(tài)下,前行槳葉激波分離和后行槳葉大迎角導(dǎo)致的動態(tài)失速[1-4]會使旋翼產(chǎn)生非線性氣動載荷,并引起高槳葉振動、顫振等問題[5-6],從而限制了直升機的承載能力、前飛速度和機動性能[7-8]。深入研究旋翼翼型動態(tài)失速的機理,有利于精確預(yù)測旋翼的氣動力以及動態(tài)失速對旋翼載荷和性能的影響。風(fēng)洞試驗作為研究旋翼翼型動態(tài)失速特性的主要手段,對于提升直升機的飛行性能,推動民用和軍用直升機向高任務(wù)載荷、高飛行速度、高機動性能發(fā)展有重要的支撐作用。
旋翼翼型動態(tài)失速研究是目前直升機空氣動力學(xué)研究領(lǐng)域的熱點[9]。國外學(xué)者依托所研制的動態(tài)試驗裝置,針對旋翼翼型的動態(tài)氣動力預(yù)測[10]、動態(tài)失速流動結(jié)構(gòu)變化[11-13]以及動態(tài)失速抑制[14-16]等開展了深入研究。在旋翼翼型動態(tài)試驗裝置研制方面[17-18],國內(nèi)學(xué)者也開展了一些工作。例如:西北工業(yè)大學(xué)的王瑩等[19]基于NF-6風(fēng)洞研制了跨聲速風(fēng)洞翼型動態(tài)失效試驗裝置。該裝置利用電機驅(qū)動曲柄連桿機構(gòu),從試驗段單側(cè)驅(qū)動翼型試驗?zāi)P偷恼袷帲囼烋R赫數(shù)為0.3,翼型試驗?zāi)P偷恼袷庮l率最高達8 Hz,折算頻率為0.05,但該裝置不便使用天平測力,只能通過測量翼型試驗?zāi)P捅砻鎵毫慝@得其動態(tài)試驗數(shù)據(jù),且單側(cè)驅(qū)動限制了翼型試驗?zāi)P偷淖畲笳袷庮l率,導(dǎo)致其振蕩頻率較低。南京航空航天大學(xué)的史志偉等[20]研制了俯仰/沉浮兩自由度電控液壓旋翼翼型動態(tài)試驗裝置,其俯仰機構(gòu)和沉浮機構(gòu)均使用液壓伺服驅(qū)動,其中俯仰振蕩頻率達4 Hz,運動范圍為-60°~60°,沉浮振蕩頻率達 2 Hz,運動范圍為-125~125 mm。但該裝置無天平測力機構(gòu),只能測量旋翼翼型表面的動態(tài)壓力,而無法準(zhǔn)確測量其阻力,且存在試驗馬赫數(shù)低和液壓系統(tǒng)故障率高、維護不便等不足。
國內(nèi)外研究表明,影響旋翼翼型動態(tài)失速的因素主要有折算頻率和馬赫數(shù)。從總體上看,國外主要的旋翼翼型動態(tài)試驗裝置都符合要求,但目前國內(nèi)在該類動態(tài)試驗裝置的研制方面還存在以下不足:1)試驗馬赫數(shù)通常不超過0.3,且現(xiàn)有裝置的振蕩頻率不高,難以兼顧馬赫數(shù)和折算頻率的要求;2)測試技術(shù)不能滿足數(shù)據(jù)的高精度要求,僅采用表面測壓方式無法獲得更全面和更精確的動態(tài)試驗數(shù)據(jù)。因此,目前國內(nèi)的試驗?zāi)芰Σ荒軡M足旋翼翼型動態(tài)失速研究向高馬赫數(shù)、高精度發(fā)展的需求,難以為數(shù)值模擬方法提供可靠的數(shù)據(jù)支撐。
針對國內(nèi)在旋翼翼型動態(tài)試驗裝置研究上的不足,筆者基于FL-20連續(xù)式跨聲速風(fēng)洞(簡稱FL-20風(fēng)洞),設(shè)計了一套高速風(fēng)洞動態(tài)試驗裝置。該裝置采用單臺伺服電機和曲柄連桿機構(gòu)從旋翼翼型試驗?zāi)P蛢啥诉M行同步驅(qū)動,以提高其振蕩頻率和試驗馬赫數(shù);使用雙天平動態(tài)載荷測量結(jié)合表面動態(tài)壓力測量的方式,以提升動態(tài)試驗數(shù)據(jù)的測量精度。
1 旋翼翼型高速風(fēng)洞動態(tài)試驗裝置設(shè)計
1.1 動態(tài)試驗裝置結(jié)構(gòu)設(shè)計
基于FL-20風(fēng)洞,配套研制旋翼翼型高速風(fēng)洞動態(tài)試驗裝置。FL-20風(fēng)洞的試驗段尺寸為1.85 m(長)×0.60 m(寬)×0.60 m(高),包含四壁孔壁試驗段,上下孔壁、左右實壁試驗段,四壁槽壁試驗段和上下槽壁、左右實壁試驗段四種不同的組合形式。FL-20風(fēng)洞試驗段的馬赫數(shù)為0.2~1.6,其控制精度小于0.001,雷諾數(shù)為0.10×106~2.25×106(旋翼翼型試驗?zāi)P偷膮⒖奸L度為0.06 m);穩(wěn)定段總壓為0.15×105~2.50×105Pa,其控制精度小于0.1%。
為滿足旋翼翼型動態(tài)失速研究向高馬赫數(shù)、高精度發(fā)展的需求,所研制的高速風(fēng)洞動態(tài)試驗裝置應(yīng)具備表1所示的技術(shù)指標(biāo)。
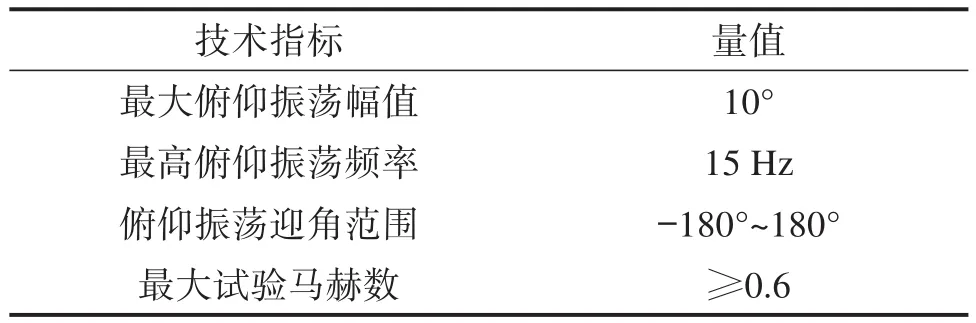
表1 旋翼翼型高速風(fēng)洞動態(tài)試驗裝置技術(shù)指標(biāo)要求Table 1 Technical index requirements of dynamic test equipment for rotor airfoil in high speed wind tunnel
圖1所示為旋翼翼型高速風(fēng)洞動態(tài)試驗裝置在FL-20風(fēng)洞試驗段的安裝結(jié)構(gòu),其主要由雙端同步運動控制機構(gòu)、雙天平動態(tài)載荷測量機構(gòu)、旋翼翼型試驗?zāi)P秃蜋C械支撐座等構(gòu)成。FL-20風(fēng)洞試驗段兩側(cè)的運動控制機構(gòu)各自通過天平與旋翼翼型試驗?zāi)P拖噙B接,實現(xiàn)雙天平動態(tài)載荷測量。

圖1 旋翼翼型高速風(fēng)洞動態(tài)試驗裝置安裝結(jié)構(gòu)Fig.1 Installation structure of dynamic test equipment for rotor airfoil in high speed wind tunnel
1.1.1 雙端同步運動控制機構(gòu)設(shè)計
雙端同步運動控制機構(gòu)的結(jié)構(gòu)如圖2所示,主要由伺服電機、T型減速器和左右對稱的曲柄連桿機構(gòu)等構(gòu)成。其中,位于頂部的T型減速器用于實現(xiàn)兩側(cè)同步運動控制。結(jié)合現(xiàn)場安裝尺寸的要求,將伺服電機偏向一側(cè)安裝;曲柄連桿機構(gòu)、旋翼翼型試驗?zāi)P秃吞炱接蓛蓚?cè)的支撐座支撐;支撐座固定在FL-20風(fēng)洞試驗段外部殼體上。采用雙端同步驅(qū)動的方式,以便實現(xiàn)雙天平動態(tài)載荷測量,并提高旋翼翼型試驗?zāi)P偷恼w安裝剛度,從而可獲得較高的振蕩頻率和馬赫數(shù)。
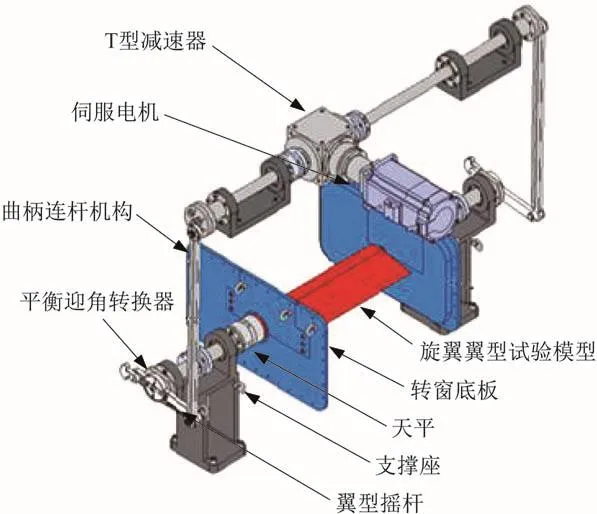
圖2 雙端同步運動控制機構(gòu)結(jié)構(gòu)示意Fig.2 Structure diagram of dual-end synchronous motion control mechanism
1)無急回曲柄連桿機構(gòu)設(shè)計。
研究旋翼翼型作正弦振蕩運動時的氣動特性是考察其動態(tài)特性的主要方式。若采用伺服電機直接驅(qū)動的方式來使旋翼翼型試驗?zāi)P吞幱诟哳l正弦俯仰振蕩狀態(tài),則要求伺服電機在圓周內(nèi)作急回往復(fù)運動,需要足夠大的驅(qū)動扭矩和足夠高的控制精度,實現(xiàn)難度較大,而通過曲柄連桿機構(gòu)將伺服電機的圓周運動轉(zhuǎn)化為旋翼翼型試驗?zāi)P偷恼腋┭稣袷庍\動,能夠避免急回往復(fù)運動對電機的沖擊,且振蕩頻率的控制精度也更高。
如圖3所示,在設(shè)計曲柄連桿機構(gòu)時,使伺服電機驅(qū)動桿旋轉(zhuǎn)中心與旋翼翼型試驗?zāi)P托D(zhuǎn)中心保持一定距離;鑒于轉(zhuǎn)窗底板與旋翼翼型試驗?zāi)P统手行膶ΨQ,且兩側(cè)的驅(qū)動方式相同,可將伺服電機驅(qū)動桿旋轉(zhuǎn)中心、旋翼翼型試驗?zāi)P托D(zhuǎn)中心以及曲柄連桿機構(gòu)中的主動桿和從動桿視作處于同一平面。圖中:A為伺服電機驅(qū)動桿旋轉(zhuǎn)中心;AB為主動桿,其與從動桿BC鉸接;翼型搖桿DC與旋翼翼型試驗?zāi)P偷男D(zhuǎn)中心固接,使得旋翼翼型試驗?zāi)P屠@D點作俯仰振蕩運動;a為主動桿AB的等效長度,b為從動桿BC的等效長度,c為翼型搖桿DC的長度,d為伺服電機驅(qū)動桿旋轉(zhuǎn)中心與旋翼翼型試驗?zāi)P托D(zhuǎn)中心的直線距離,e為伺服電機驅(qū)動桿旋轉(zhuǎn)中心與旋翼翼型試驗?zāi)P托D(zhuǎn)中心在水平面上的投影距離。當(dāng)c>>a和d>>a時,在伺服電機的勻速驅(qū)動下,旋翼翼型試驗?zāi)P桶凑乙?guī)律俯仰振蕩,通過改變伺服電機的轉(zhuǎn)速即可實現(xiàn)其振蕩頻率的調(diào)節(jié)。本文所設(shè)計的旋翼翼型試驗?zāi)P偷母┭稣袷庮l率范圍為0.2~15.0 Hz,頻率精度高于0.1 Hz。
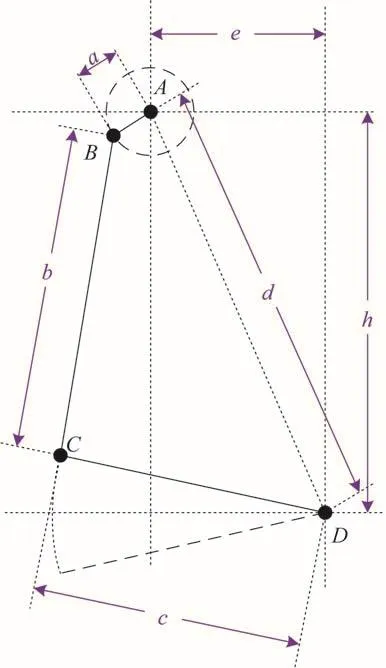
圖3 無急回曲柄連桿機構(gòu)結(jié)構(gòu)簡圖Fig.3 Structure diagram of crank linkage rod mechanism without snapback
2)平衡迎角調(diào)節(jié)機構(gòu)設(shè)計。
為實現(xiàn)旋翼翼型試驗?zāi)P推胶庥堑恼{(diào)節(jié),設(shè)計了由平衡迎角轉(zhuǎn)換器和翼型搖桿組成的平衡迎角調(diào)節(jié)機構(gòu),其結(jié)構(gòu)如圖4所示。平衡迎角轉(zhuǎn)換器和翼型搖桿由螺栓和銷連接,通過改變兩者組合時的相位角來實現(xiàn)旋翼翼型試驗?zāi)P推胶庥堑倪x擇,可選平衡迎角為-5°,0°,5°和10°。
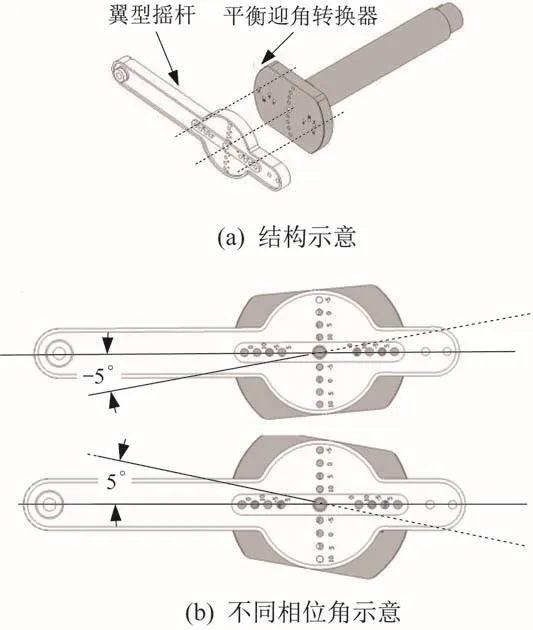
圖4 平衡迎角調(diào)節(jié)機構(gòu)示意Fig.4 Schematic diagram of balance attack angle adjustment mechanism
3)振蕩幅值調(diào)節(jié)機構(gòu)設(shè)計。
旋翼翼型試驗?zāi)P透┭稣袷幏档恼{(diào)節(jié)可通過改變從動桿BC的B端在主動桿撥盤上的安裝位置來實現(xiàn)。為此,設(shè)計了振蕩幅值調(diào)節(jié)機構(gòu),其結(jié)構(gòu)如圖5所示。從動桿B端距離主動桿撥盤中心越遠,則主動桿AB的有效長度a越長,即對應(yīng)的振蕩幅值越大。在距離主動桿撥盤中心22,36,58和72 mm處分別設(shè)置安裝孔,以實現(xiàn)3°,5°,8°和10°振蕩幅值的調(diào)節(jié)。
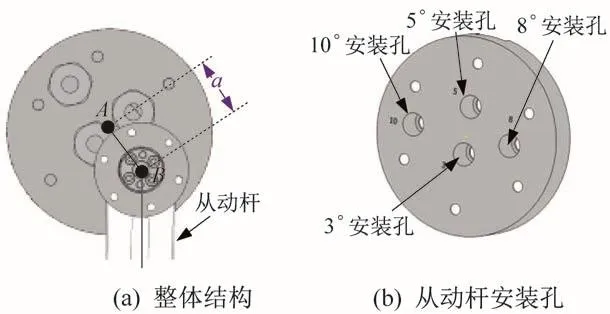
圖5 振蕩幅值調(diào)節(jié)機構(gòu)示意Fig.5 Schematic diagram of oscillation amplitude adjustment mechanism
1.1.2 雙天平動態(tài)載荷測量機構(gòu)設(shè)計
旋翼翼型試驗?zāi)P捅砻鎵毫Φ恼袷幣c其自身的振蕩有關(guān)。為實現(xiàn)動態(tài)試驗數(shù)據(jù)的高精度測量,須解決旋翼翼型試驗?zāi)P捅砻鎰討B(tài)氣動力和振蕩角度、天平動態(tài)載荷以及風(fēng)洞試驗段來流速度精確測量的關(guān)鍵問題。
在風(fēng)洞試驗中,動態(tài)壓力測量是一種常用的間接測力方式:先利用動態(tài)壓力傳感器采集旋翼翼型試驗?zāi)P捅砻娴膲毫Γ偻ㄟ^積分獲得其軸向和法向的氣動力,進而間接計算得到其升力、阻力和俯仰力矩等。該結(jié)果基本不受旋翼翼型試驗?zāi)P投嗣妗⒅屋S等的影響。
本文旋翼翼型試驗?zāi)P捅砻娴臏y壓元件為27個XCE-062-1.7 BAR系列和5個XCEL-100-1 BAR系列的絕壓式動態(tài)壓力傳感器(Kulite公司生產(chǎn)),其參數(shù)如表2所示。各動態(tài)壓力傳感器均連接4根電纜,其既可測量靜態(tài)壓力,又可測量動態(tài)壓力,具有頻響高、精度高和尺寸小等特點。
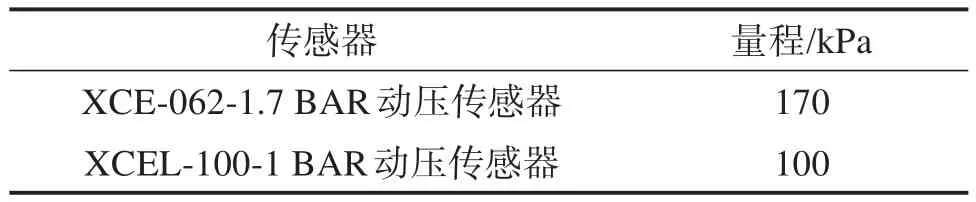
表2 動態(tài)壓力傳感器參數(shù)Table 2 Parameters of dynamic pressure sensors
但是,動態(tài)壓力測量忽略了旋翼翼型試驗?zāi)P偷哪Σ磷枇Γ瑥亩鴮?dǎo)致測量結(jié)果的精度不足。而天平測力作為一種直接測力方式,可直接測量旋翼翼型試驗?zāi)P驮诟鞣较蛏系臍鈩虞d荷分量,能反映旋翼翼型動態(tài)失速后其表面三維流動結(jié)構(gòu)改變所引起的載荷變化。雖然該測量結(jié)果的精度在一定程度上會受到天平組合、旋翼翼型試驗?zāi)P妥笥叶嗣媾c風(fēng)洞壁面之間縫隙的影響,且影響程度還會隨旋翼翼型試驗?zāi)P驼袷庮l率和振蕩幅值的變化而變化,但通過與動態(tài)壓力測量方式組合,能有效實現(xiàn)優(yōu)勢互補,進而提高測量精度。
現(xiàn)有的旋翼翼型動態(tài)試驗裝置采用單天平測力方式居多。為進一步提高動態(tài)試驗裝置的技術(shù)指標(biāo)和測試精度,本文創(chuàng)新性地提出了一種雙端同步測量旋翼翼型試驗?zāi)P蜌鈩恿土氐姆椒āKO(shè)計的雙天平動態(tài)載荷測量機構(gòu)如圖6所示。該機構(gòu)采用對稱設(shè)計,主要包含從動桿、翼型搖桿、傳動軸法蘭、膜片聯(lián)軸器、天平和軸承等部件。天平安裝在旋翼翼型試驗?zāi)P偷膬蓚?cè),位于傳動軸法蘭和旋翼翼型試驗?zāi)P头ㄌm之間,其主要參數(shù)如表3所示。由于所用的天平為應(yīng)變天平,屬于半剛性元件,若旋翼翼型試驗?zāi)P驮跉鈩虞d荷作用下產(chǎn)生變形,則該變形會直接通過天平傳遞到曲柄連桿機構(gòu),導(dǎo)致曲柄連桿機構(gòu)不能穩(wěn)定在一個平面上,從而影響測量精度。為避免這種失穩(wěn)現(xiàn)象,設(shè)計了如圖6(b)所示的隔振和解耦結(jié)構(gòu),即利用軸承和膜片聯(lián)軸器,使得翼型搖桿僅可傳遞扭矩;旋翼翼型試驗?zāi)P痛┻^轉(zhuǎn)窗底板上的孔與天平直接連接,使得其氣動載荷均可傳遞到天平上,實現(xiàn)對氣動載荷的同步測量和解耦,保證了測量精度。

表3 天平的主要參數(shù)Table 3 Main parameters of balance
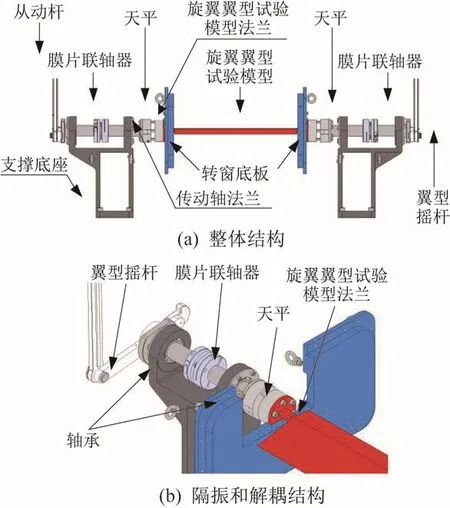
圖6 雙天平動態(tài)載荷測量機構(gòu)示意Fig.6 Schematic diagram of dual-balance dynamic load measuring mechanism
1.2 動態(tài)試驗裝置模態(tài)分析
旋翼翼型高速風(fēng)洞動態(tài)試驗裝置的安全性和可靠性是開展風(fēng)洞試驗的前提。該動態(tài)試驗裝置各組成部分的動力學(xué)特性都會對整機產(chǎn)生影響。其中,結(jié)構(gòu)共振是影響動態(tài)試驗裝置安全性和可靠性的重要因素之一。因此,針對動態(tài)試驗裝置開展模態(tài)分析是其設(shè)計過程中必不可少的環(huán)節(jié)。
1.2.1 旋翼翼型試驗?zāi)P湍B(tài)分析
旋翼翼型試驗?zāi)P妥鳛樾硪硇透咚亠L(fēng)洞動態(tài)試驗中的關(guān)鍵部件,其固有模態(tài)不能與試驗振蕩頻率重疊或接近。圖7所示為OA309旋翼翼型試驗?zāi)P偷慕Y(jié)構(gòu),其上片和下片均選用高強度鋁合金制作,支撐軸選用高強度材料30CrMnSiA制作,以滿足高頻振蕩試驗的需求。此外,支撐軸上開有安裝動態(tài)壓力傳感器的槽位,使用螺栓固定旋翼翼型試驗?zāi)P蜕掀罂蓪討B(tài)壓力傳感器固定安裝在支撐軸上;旋翼翼型試驗?zāi)P蛢?nèi)部留有空腔,用于布置動態(tài)壓力傳感器的氣路和線路。
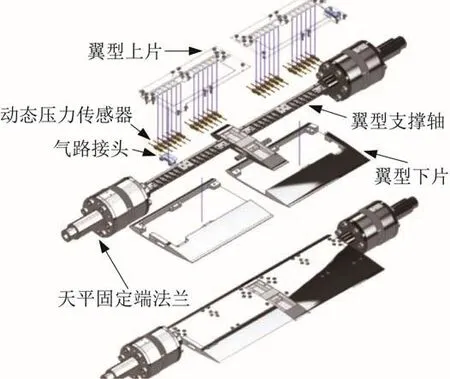
圖7 OA309旋翼翼型試驗?zāi)P徒Y(jié)構(gòu)示意Fig.7 Structure diagram of OA309 rotor airfoil test model
固定旋翼翼型試驗?zāi)P蛢啥说妮S承安裝面,采用有限元仿真得到其模態(tài)。圖8所示為旋翼翼型試驗?zāi)P鸵浑A模態(tài)仿真結(jié)果。
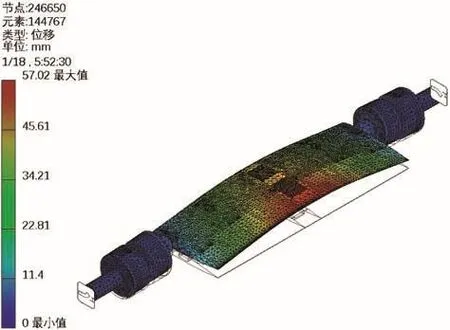
圖8 旋翼翼型試驗?zāi)P鸵浑A模態(tài)仿真結(jié)果Fig.8 Simulation result of first-order mode of rotor airfoil test model
旋翼翼型試驗?zāi)P湍B(tài)仿真結(jié)果顯示,其前4階模態(tài)的固有頻率分別為137.28,316.76,359.76和481.71 Hz,均遠離動態(tài)試驗的振蕩頻率,即動態(tài)試驗裝置滿足避免結(jié)構(gòu)共振的動力學(xué)設(shè)計要求。
1.2.2 整機模態(tài)分析
在對整個旋翼翼型高速風(fēng)洞動態(tài)試驗裝置進行模態(tài)分析時,先對其三維模型進行簡化并添加約束:固定上、下基準(zhǔn)柱的底面,分別在軸承的接觸面添加軟彈簧接觸;將平衡迎角轉(zhuǎn)換器處的連接設(shè)置為柱連接,銷連接設(shè)置為粘合接觸;T型減速器設(shè)置為轉(zhuǎn)動約束。通過有限元仿真得到整個裝置的模態(tài),圖9所示為其一階、二階模態(tài)。
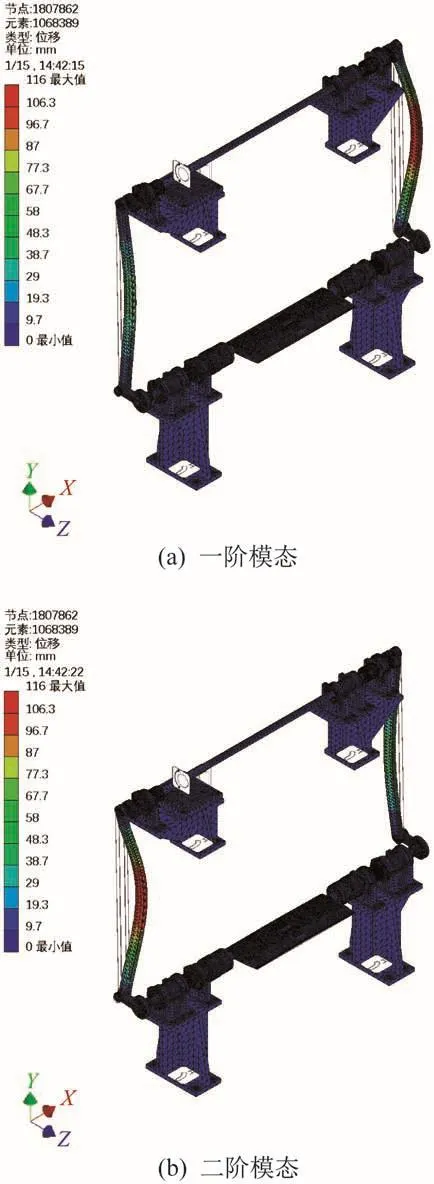
圖9 旋翼翼型高速風(fēng)洞動態(tài)試驗裝置一階、二階模態(tài)仿真結(jié)果Fig.9 Simulation results of first and second order modes of dynamic test equipment of rotor airfoil in high speed wind tunnel
旋翼翼型高速風(fēng)洞動態(tài)試驗裝置模態(tài)仿真結(jié)果顯示,其前4階模態(tài)的固有頻率分別為85.26,87.90,104.78和138.78 Hz,均高于動態(tài)試驗的振蕩頻率,說明整個裝置滿足動力學(xué)設(shè)計要求。
2 旋翼翼型高速風(fēng)洞動態(tài)試驗裝置控制系統(tǒng)設(shè)計
2.1 控制系統(tǒng)軟、硬件設(shè)計
旋翼翼型高速風(fēng)洞動態(tài)試驗裝置的控制系統(tǒng)采用上位機/下位機控制方式,其框架如圖10所示。上位機使用工業(yè)控制計算機,基于LabVIEW平臺開發(fā)控制程序,下位機為西門子Simotion D運動控制器。上位機與下位機之間通過傳輸控制協(xié)議(transmission control protocol/internet protocol,TCP/IP)通信。

圖10 旋翼翼型高速風(fēng)洞動態(tài)試驗裝置控制系統(tǒng)框架Fig.10 Control system framework of dynamic test equipment for rotor airfoil in high speed wind tunnel
下位機通過運動控制器實現(xiàn)對永磁同步伺服電機的控制,多個運動控制器的功能直接被集成到工控機上的驅(qū)動系統(tǒng)SINAMICS S120軟件中,可同時實現(xiàn)多個伺服電機的運動控制及相應(yīng)功能。上位機的軟件結(jié)構(gòu)如圖11所示,主要包括數(shù)據(jù)管理模塊、運動控制模塊和人機交互界面。用戶通過在人機交互界面上進行操作來完成系統(tǒng)零位、控制參數(shù)和運動參數(shù)(振蕩幅值、振蕩頻率)等的設(shè)定,還可實時監(jiān)控動態(tài)試驗裝置的運行狀態(tài),以及將旋翼翼型試驗?zāi)P偷倪\行角度,伺服電機的溫度、扭矩等反饋給操作人員。此外,在運動超限、過載及設(shè)備劇烈振動等情況時還可顯示報警信息。圖12所示為所開發(fā)的旋翼翼型高速風(fēng)洞動態(tài)試驗裝置控制系統(tǒng)的人機交互界面。
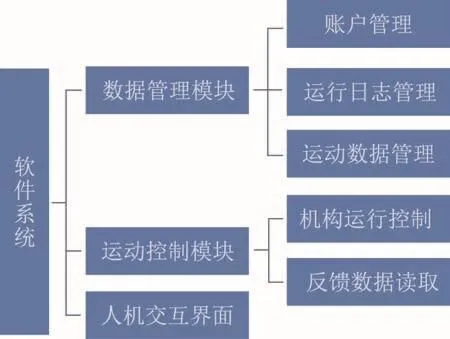
圖11 旋翼翼型高速風(fēng)洞動態(tài)試驗裝置控制系統(tǒng)上位機軟件結(jié)構(gòu)Fig.11 Upper computer software structure of control system of dynamic test equipment for rotor airfoil in high speed wind tunnel
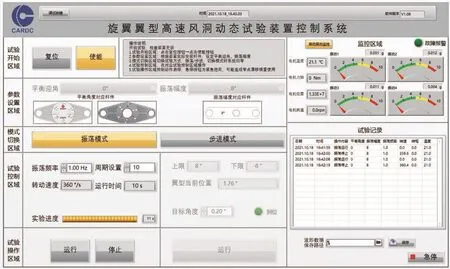
圖12 旋翼翼型高速風(fēng)洞動態(tài)試驗裝置控制系統(tǒng)人機交互界面Fig.12 Human-machine interface of control system of dynamic test equipment for rotor airfoil in high speed wind tunnel
2.2 控制精度驗證
為確保旋翼翼型高速風(fēng)洞動態(tài)試驗裝置的精度,在旋翼翼型試驗?zāi)P偷钠D(zhuǎn)軸上安裝電位計,通過電位計實時反饋的電壓來測量旋翼翼型試驗?zāi)P偷钠D(zhuǎn)角度。電位計選用德國公司生產(chǎn)的Novotechnik角位移傳感器,其主要參數(shù)如表4所示。圖13所示為旋翼翼型試驗?zāi)P透┭稣袷幏禐?°、振蕩頻率為2 Hz、平衡迎角為0°時電位計反饋的電壓隨時間的變化曲線。由圖可知,電壓的變化曲線平滑連續(xù)且諧波分布均勻,波形重復(fù)性良好。將圖13所示的電壓信號轉(zhuǎn)換為旋翼翼型試驗?zāi)P偷慕俏灰疲傻闷湔袷幏档目刂凭葍?yōu)于0.1°,振蕩頻率的控制精度優(yōu)于0.05 Hz,平衡迎角的控制精度高于0.1°,說明該動態(tài)試驗裝置具有較高的控制精度。
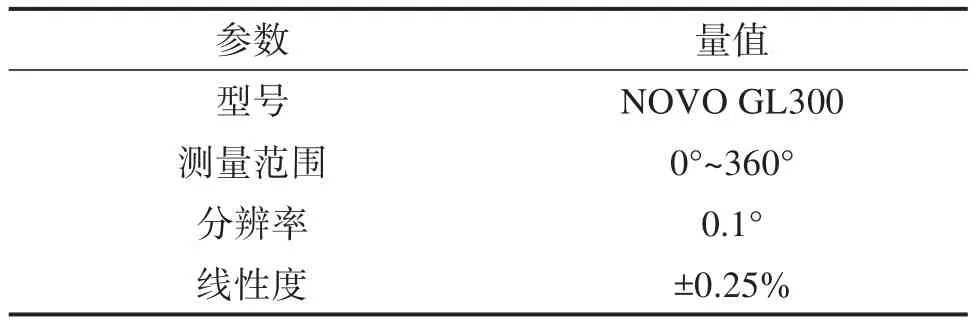
表4 Novotechnik角位移傳感器的主要參數(shù)Table 4 Main parameters of Novotechnik angular displacement sensor
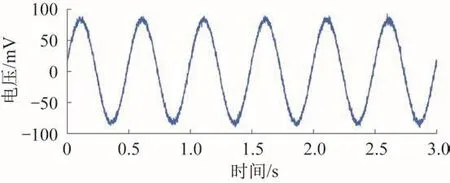
圖13 電位計反饋電壓隨時間的變化曲線Fig.13 Change curve of potentiometer feedback voltage with time
3 風(fēng)洞試驗
基于弦長為0.21 m的CRA309旋翼翼型試驗?zāi)P停贔L-20風(fēng)洞中開展相關(guān)試驗。
3.1 性能考核試驗
為考核所研制的旋翼翼型高速風(fēng)洞動態(tài)試驗裝置的運動性能,在馬赫數(shù)為0.2、旋翼翼型試驗?zāi)P透┭稣袷幏禐?0°、平衡迎角為0°和振蕩頻率不同的工況下開展試驗。圖14所示為振蕩頻率為17 Hz時旋翼翼型試驗?zāi)P偷纳ο禂?shù)CL隨迎角α的變化曲線。結(jié)果顯示:當(dāng)振蕩頻率為17 Hz時,該動態(tài)試驗裝置仍能較好地控制旋翼翼型試驗?zāi)P偷恼袷巺?shù),其升力系數(shù)的變化趨勢正常,符合預(yù)期。由此說明,該動態(tài)試驗裝置的最大振蕩頻率可達到17 Hz,超過設(shè)計所要求的15 Hz,這在國際同類試驗裝置中處于領(lǐng)先水平,可為旋翼翼型非定常動態(tài)氣動特性的研究提供有力的設(shè)備支撐。
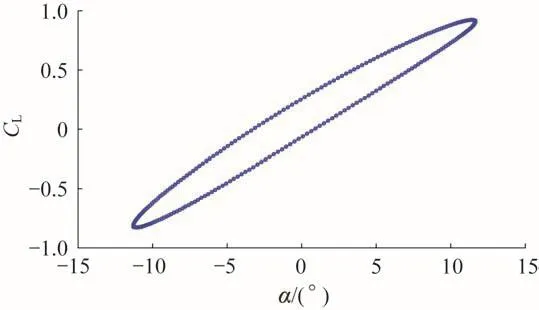
圖14 旋翼翼型高速風(fēng)洞動態(tài)試驗裝置運動性能考核結(jié)果(振蕩頻率為17 Hz)Fig.14 Motion performance assessment result of dynamic test equipment for rotor airfoil in high speed wind tunnel(with oscillation frequency of 17 Hz)
為考核旋翼翼型高速風(fēng)洞動態(tài)試驗裝置的增壓性能,在風(fēng)洞增壓2.0倍、馬赫數(shù)為0.6,旋翼翼型試驗?zāi)P透┭稣袷幏禐?°、振蕩頻率為10 Hz、平衡迎角為5°的工況下開展試驗,結(jié)果如圖15所示。此時的風(fēng)洞試驗雷諾數(shù)達到5×106(以旋翼翼型試驗?zāi)P偷南议L為參考長度),已滿足真實直升機旋翼后行槳葉區(qū)域動態(tài)失速對雷諾數(shù)的要求,從而進一步擴展了動態(tài)試驗裝置的模擬能力。
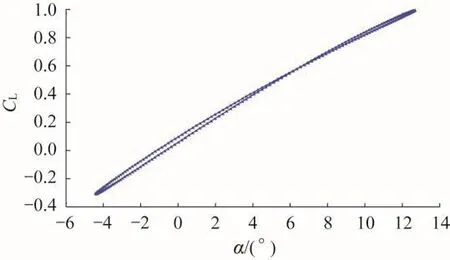
圖15 旋翼翼型高速風(fēng)洞動態(tài)試驗裝置增壓性能考核結(jié)果Fig.15 Pressurization performance assessment result of dynamic test equipment for rotor airfoil in high speed wind tunnel
3.2 同步測力測壓試驗
為對比表面動態(tài)壓力測量和雙天平動態(tài)載荷測量的差異,并驗證結(jié)合2種測量手段的可行性,分別在靜態(tài)和動態(tài)試驗條件下開展了旋翼翼型試驗?zāi)P屯綔y力測壓試驗,對比其在不同迎角α下的升力系數(shù)CL。其中,動態(tài)試驗是在旋翼翼型試驗?zāi)P透┭稣袷幏禐?°、振蕩頻率為2 Hz和平衡迎角為5°的工況下開展的。典型的試驗結(jié)果如圖16所示,結(jié)果顯示,通過表面測壓和雙天平測力所獲得的旋翼翼型試驗?zāi)P偷撵o、動態(tài)升力系數(shù)變化曲線在失速前的一致性良好,說明2種測量方式可互為驗證和補充。
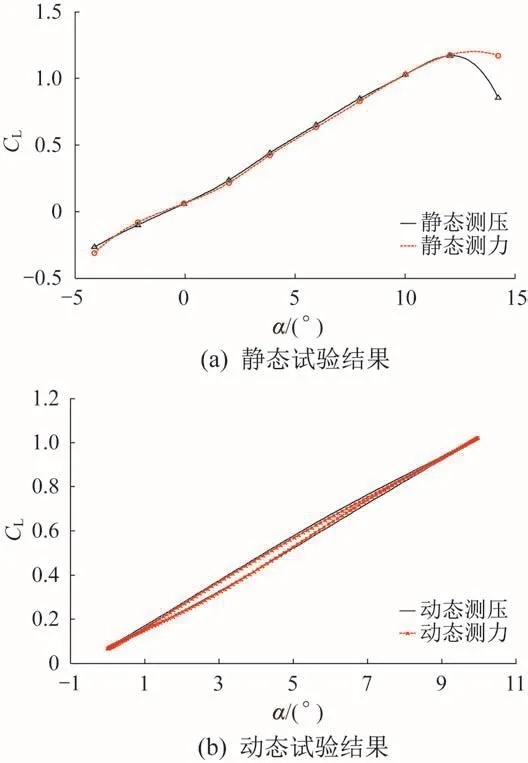
圖16 旋翼翼型試驗?zāi)P屯綔y力測壓結(jié)果對比Fig.16 Comparison of synchronous force measurement and pressure measurement results of rotor airfoil test model
靜態(tài)試驗結(jié)果顯示,當(dāng)旋翼翼型試驗?zāi)P偷挠浅^靜態(tài)失速迎角后,基于靜態(tài)測壓獲得的升力系數(shù)較基于靜態(tài)測力獲得的有大幅度的下降,這是因為當(dāng)發(fā)生流動分離時,旋翼翼型試驗?zāi)P捅砻娴臍饬餮卣瓜蚍较虻姆植汲霈F(xiàn)不均現(xiàn)象,使得測壓結(jié)果與測力結(jié)果出現(xiàn)一定程度的偏差。
綜合旋翼翼型高速風(fēng)洞動態(tài)試驗裝置的性能考核結(jié)果以及同步測力測壓試驗結(jié)果可知,其性能滿足要求,且試驗數(shù)據(jù)可靠、規(guī)律合理;旋翼翼型試驗?zāi)P偷恼袷庮l率達國際領(lǐng)先水平。旋翼翼型高速風(fēng)洞動態(tài)試驗裝置的實際技術(shù)指標(biāo)如表5所示。
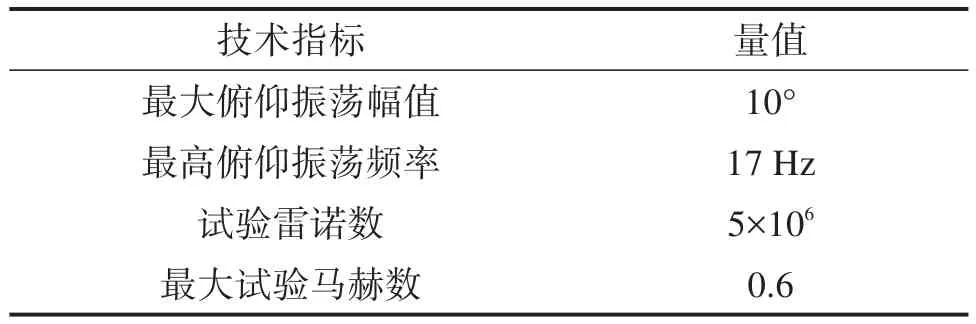
表5 旋翼翼型高速風(fēng)洞動態(tài)試驗裝置的實際技術(shù)指標(biāo)Table 5 Actual technical indexes of dynamic test equipment for rotor airfoil in high speed wind tunnel
4 結(jié) 論
1)創(chuàng)新性地提出了采用雙端同步驅(qū)動旋翼翼型試驗?zāi)P偷姆绞剑⒃O(shè)計了特有的無急回曲柄連桿機構(gòu)、平衡迎角調(diào)節(jié)機構(gòu)、振蕩幅值調(diào)節(jié)機構(gòu),提高了動態(tài)試驗中的振蕩頻率;開展了模態(tài)分析,確保了動態(tài)試驗裝置的安全可靠性;設(shè)計了高精度的控制系統(tǒng),提升了動態(tài)試驗裝置的運動控制精度。
2)采用雙天平動態(tài)載荷測量結(jié)合表面動態(tài)測壓的方式,實現(xiàn)了旋翼翼型氣動載荷的精確測量。典型工況下的試驗數(shù)據(jù)顯示,測力、測壓結(jié)果的一致性良好,規(guī)律符合預(yù)期,結(jié)果精確可靠,表明所研制的動態(tài)試驗裝置滿足直升機旋翼翼型動態(tài)特性試驗評估的要求。
3)突破了國內(nèi)旋翼翼型動態(tài)試驗技術(shù)發(fā)展的瓶頸,對于所研制的動態(tài)試驗裝置,當(dāng)旋翼翼型試驗?zāi)P偷母┭稣袷幏禐?0°時,其最大振蕩頻率達到17 Hz,最高試驗馬赫數(shù)突破0.6,雷諾數(shù)突破5×106。
高速風(fēng)洞動態(tài)試驗裝置的研制提高了旋翼翼型動態(tài)試驗的能力,標(biāo)志國內(nèi)在旋翼翼型動態(tài)試驗研究領(lǐng)域達到國際領(lǐng)先水平,這可為旋翼翼型動態(tài)失速問題的深入研究提供重要技術(shù)支撐。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19