撲翼飛行器的研究現狀與發展
2022-09-13 03:52:06張忠海王建輝趙全亮何廣平
兵器裝備工程學報 2022年8期
關鍵詞:設計
周 林,張忠海,王建輝,趙全亮,何廣平
(1.北京航天測控技術有限公司, 北京 100041; 2.北方工業大學, 北京 100144; 3.北京工業大學, 北京 100124)
1 引言
類對飛行的最初渴望來自于自然界的飛行生物。100余年來,人類對飛行器設計制造技術進行不斷的探索研究,時至今日,載人航空飛行器設計制造已經取得了巨大成就。近30余年來,在國防工業技術發展需求的推動下,無人航空飛行器技術發展得到國際大國的高度重視,仿生撲翼飛行器技術因此得到很大發展。與固定翼飛行器和旋翼飛行器相比,撲翼飛行器具有氣動噪聲小、機動靈活性強、仿生隱蔽性好等優點,在民用和軍事領域均有廣闊的應用前景。
盡管撲翼飛行器在實際應用中有著獨特的優勢,但是目前實際應用并不廣泛。限制這類飛行器發展應用的因素主要包括:
1) 力學建模與控制。撲翼飛行器是典型的非定常空氣動力學系統,力學建模和高升阻比機理分析異常復雜,通常只能借助于數值建模和分析方法。當前各研究機構對于一些常見昆蟲(如果蠅)等建立有多種成熟的理論模型和準穩態模型,但對鳥類、蝙蝠等脊椎動物的空氣動力學機制研究尚存在一定空白,難以建立精確的解析或半解析力學模型,給撲翼飛行器控制律系統性設計提出了一定的技術挑戰。
2) 續航問題。與仿生魚等其他種類仿生機器人應用發展碰到的問題相似,受到可重復使用電池能量密度的限制,機載電源的選擇非常局限,導致已發明的各類撲翼飛行器續航能力有限,難以執行長航時任務。
3) 飛行效率。但是撲翼飛行器是一類主動尋求在非定常流體環境中高效機動的機電系統。受到傳統電磁致動原動件功率密度比的限制,撲翼飛行器設計需要進行嚴格的輕量化設計制造。飛行器結構剛度小,結構變形大,結構變形與非定常空氣動力之間存在顯著的動態交互耦合。大量理論和實踐研究表明,撲翼渦流與大變形機械結構之間的交互耦合動力學,對撲翼飛行能效性和系統運動穩定性有顯著影響。針對鳥類、蝙蝠等脊椎動物非定常流固耦合動態系統的精確建模和分析,目前還存在一定技術難度,進一步增加了撲翼飛行器控制系統設計的復雜性。
近年來,許多學者和研究人員就以上問題開展了大量的研究工作,并取得了大量的研究成果。本文對近20年來國內外撲翼飛行器的相關研究進行總結與歸納,介紹了仿鳥、仿昆蟲、仿蝙蝠型三類典型撲翼飛行器實驗樣機的發展簡況。進一步從力學建模、結構與材料、控制系統設計等方面,闡述了當前撲翼飛行器設計制造技術發展中存在的一些技術難題。最后對未來撲翼飛行器的發展進行了一定預測與展望。
2 撲翼飛行器的研究現狀
撲翼飛行器是一類重要的仿生飛行器。根據仿生對象和飛行器主要結構特征分類,可以分為仿鳥型、仿昆蟲型以及仿蝙蝠型三類撲翼飛行器。
2.1 仿鳥撲翼飛行器
2010年開始,美國加利福尼亞大學開始對仿生撲翼飛行器進行研究并成功研制出H2Bird。這款撲翼飛行器采用了魯棒控制律作為核心控制算法,借助CPU、傳感器和攝像頭等,成功實現了室內飛行,如圖1所示。

圖1 H2Bird飛行器Fig.1 H2Bird aircraft
2011年,德國Festo公司首次公開展示了仿海鷗撲翼飛行器Smartbird,如圖2所示。Smartbird體長1.06 m,質量約450 g,翼展為1.96 m。Smartbird采用仿海鷗的流線型機體和可折疊撲翼,傳動機構采用了對稱分布的四連桿復合機構,可以同時實現撲翼運動以及翼尖的扭轉運動,是仿鳥撲翼飛行器樣機發展過程中的一個里程碑。因為這款仿鳥撲翼飛行器尺寸較大,其主要元器件選擇余地大,對隱蔽性更好的微小型仿鳥撲翼飛行器設計制造技術發展來說,參考價值有限。

圖2 Smartbird飛行器Fig.2 Smartbird aircraft
2012年,美國AeroVironment公司設計了一種仿蜂鳥微型撲翼飛行器Hummingbird(圖3)。Hummingbird是納米飛行計劃項目的一部分,該計劃由美國國防部高級研究計劃局(DARPA)提出。Hummingbird的翼展為0.165 m,質量10 g。最新資料顯示,該飛行器最大飛行時間可達11 min,能實現空中懸停和翻跟斗等高難度動作,代表了微小型仿生撲翼飛行器實驗樣機設計、制造和控制技術的較高水平。

圖3 Hummingbird飛行器Fig.3 Hummingbirdaircraft
國內對于撲翼飛行器的研究也在有序開展。南京航空航天大學團隊針對撲翼飛行器樣機研制與風洞試驗測試進行了深入研究。如圖4所示為南京航空航天大學研制的差動式撲翼飛行器-“金鷹”,該撲翼飛行器翼展為650 mm,機身長為160 mm,總質量為300 g。該飛行器可以通過伺服器控制左右機翼差動扭轉,從而達到轉向的目的,同時在飛行器上搭載自主研制的微型自動駕駛儀實現自主飛行。

圖4 金鷹飛行器Fig.4 Golden Eagle aircraft
哈爾濱工業大學團隊在撲翼飛行氣動特性機理、低雷諾數下微型撲翼生物運動機理、柔性翅翼空氣動力學開展了一定的理論研究,設計了一款微型撲翼飛行器并成功試飛,如圖5所示。該飛行器機翼采用柔性薄膜材料,翼展為 28 cm,總質量為19.2 g,搭載有自主飛行控制器,能夠實現短時間自主飛行。

圖5 哈工大撲翼飛行器Fig.5 Aircraft of HIT
在2011年的中航工業杯—國際無人飛行器創新大獎賽上,西北工業大學的信鴿首次登上舞臺(圖6)。信鴿采用的是鳥類流線型機身,機翼由平面連桿機構進行驅動,翼展約為0.6 m,飛行速度可達6~10 m/s,質量約220 g。該飛行器機架采用碳纖維復合材料,裝載飛行控制導航系統、圖像處理分系統、測控與信息數據傳輸系統,可實現自主起飛與自主巡航功能,機載微型攝像機可實時獲取并傳輸地面圖像信息,實現偵查功能,在國內撲翼飛行器的發展中具有重要意義。
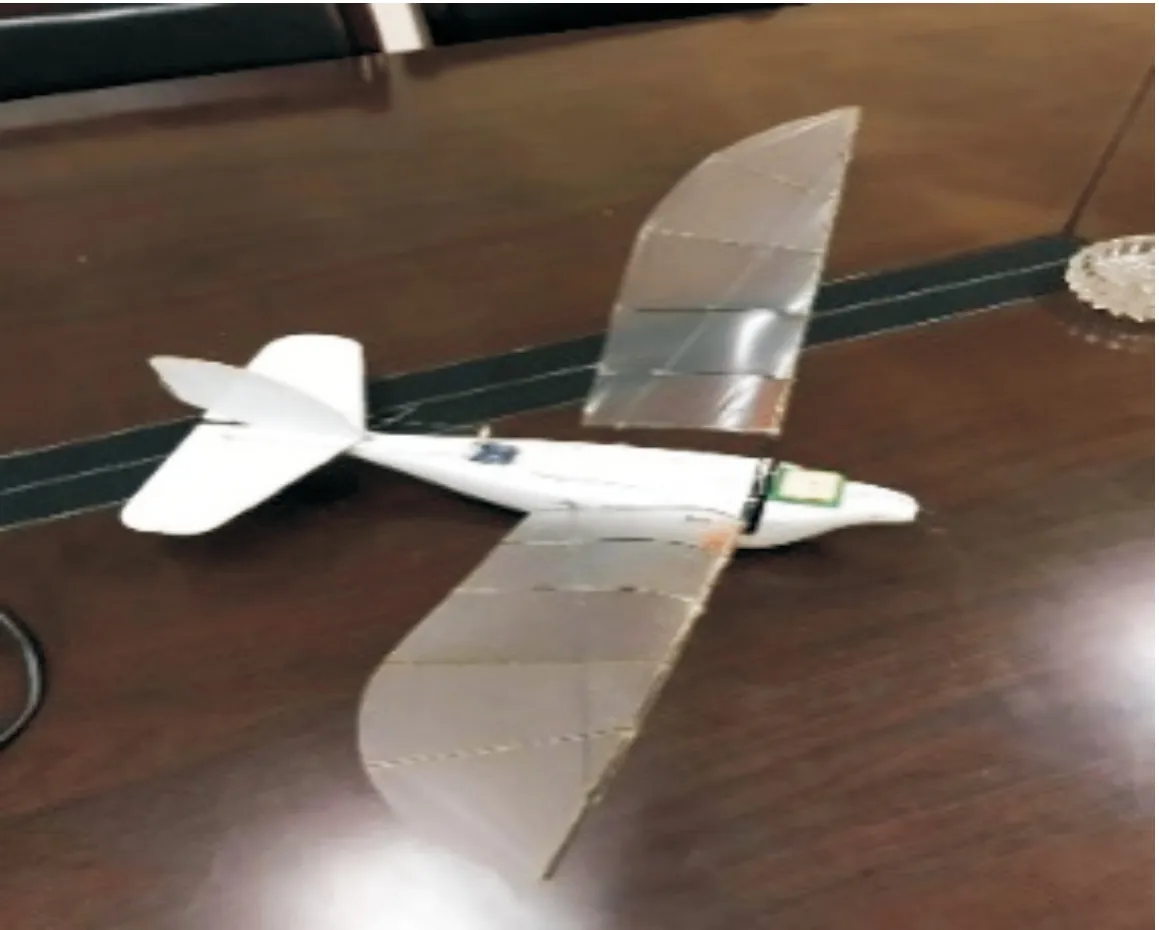
圖6 信鴿飛行器Fig.6 Homing pigeon aircraft
目前的仿鳥撲翼飛行器在氣動效率遠不如真正的鳥類,僅僅是模仿鳥類的飛行模式,飛行系統的傳感、驅動和控制仍處在探索研究階段,絕大部分飛行器仍未走出實驗室。對于仿鳥型撲翼飛行器,應以長航時、高負載、遠距離觀測應用為主要發展方向。
2.2 仿昆蟲撲翼飛行器
除了鳥類,大量昆蟲也采用撲翼飛行方式進行遠距離移動覓食。目前仿昆蟲撲翼飛行器,大多以蜻蜓、蒼蠅、蝴蝶和蜜蜂作為仿生對象。
在仿蜻蜓撲翼飛行器中,最知名的是代爾夫特理工大學的Delfly系列飛行器實驗樣機。代爾夫特理工大學先后研制出五代Delfly飛行器,分別是Delfly Ⅰ、Delfly Ⅱ、Delfly Micro、Delfly Explorer與Delfly Nimble,Delfly Nimble如圖7所示。其中,Delfly Micro翼展約為0.33 m,質量約29 g。Defly系列搭載了微型攝像機,借助于圖像識別技術,實現了飛行器的位置控制。

圖7 Delfly Nimble飛行器Fig.7 Delfly Nimble aircraft
值得注意的是,在2017年,德雷珀實驗室首次展示了一款半蜻蜓半機械飛行器DragonflEye,如圖8所示。

圖8 DragonflEye飛行器Fig.8 DragonflEye aircraft
該飛行器利用基因改造技術,在蜻蜓的身體中植入光極(optrode),利用光遺傳學(optogenetic)技術,使用光子刺激蜻蜓的特定神經元,實現對蜻蜓飛行的控制。DragonflEye使用機載的太陽能電路板供能,理想情況下,只需要有陽光、水與食物即可解決對于撲翼飛行器來說很致命的續航問題,這也為未來撲翼飛行器的發展提供了一種新的思路。
在2012年,《Science》雜志刊登了一款世界上最小的飛行器RoboBee,該仿蜜蜂飛行器由哈佛大學的Wood教授團隊開發,質量僅僅80 mg,如圖9所示。除了平穩起飛,RoboBee還實現了懸停和路徑追蹤。在2016年,《Science》雜志再次刊登了新一代RoboBee的研究進展,與上一代相比,新型RoboBee增加了一個電極,通過該電極,RoboBee可以吸附在大多數物體上,這是以往各種飛行器都未嘗試過的。

圖9 RoboBee飛行器Fig.9 RoboBee aircraft
2.3 仿蝙蝠撲翼飛行器
蝙蝠是唯一能夠飛行的哺乳動物,也是撲翼飛行生物中飛行噪聲最小的一類。蝙蝠的翅膀結構特征復雜,仿蝙蝠飛行器樣機研制涉及大變形柔性薄膜結構的流固耦合動力學研究,建模與力學分析難度較大,相關技術與理論不夠成熟,因此,目前對仿蝙蝠撲翼飛行器的研究相對較少。
伊利諾伊大學厄巴納-香檳分校和加州理工大學在2017年研制出了一款仿蝙蝠撲翼飛行器Bat Bot (B2),該飛行器并沒有采用大量的分布式控制器,而是采用了高度可伸縮的硅基薄膜機翼,從而更好的匹配了蝙蝠飛行的形態特征。B2飛行器質量為93 g,使用一個直流無刷電機同時驅動左右機翼,拍動頻率約10 Hz。
對蝙蝠的運動進行分析是一項非常有挑戰性的工作。但對于仿蝙蝠撲翼飛行器樣機制造,了解蝙蝠如何通過空氣動力以及復雜肌肉骨骼機制的復雜交互作用,來控制其身體姿態和位置是必不可少的,這是仿蝙蝠撲翼飛行器技術發展中的重要研究課題。
3 撲翼飛行器的關鍵技術
3.1 撲翼飛行器空氣動力學
目前撲翼飛行器樣機,大多處于實驗室試驗階段,雖然大量研究工作表明,以往提出的眾多設計方案和設計方法具有可行性,但距離實際應用仍有差距。要從實驗室樣機向工程化方向發展,需要在理論和技術方面進一步取得突破。對于鳥類,拍打翅膀獲得的驅動力主要來自于3部分:
1) 尾部渦流。卡門-伯格斯理論認為,機翼的振動能夠消除邊界層中的渦度,產生反向卡門渦街,渦街本身攜帶著與機翼運動方向相反的動量,使得機翼振動產生推力。
2) 慣性的影響。當機翼拍動時,局部附加質量效應產生附加慣性力。
3) 前緣引力。當流體以大曲率流經鳥類前緣和頭部時,局部流速加快,形成低壓區,導致前緣吸力產生一定的驅動力。
此外,鳥類流線型的身體、不同的幾何形狀、不同的飛行模式與飛行過程中翅膀的變形是鳥類在不斷變化的氣流條件下降低阻力的關鍵因素。
與鳥類相比,昆蟲的飛行機理更加復雜。隨著近年來數值模擬技術的迅速發展,人們對典型昆蟲的飛行機理有了系統深入的了解。目前的研究成果已經提出了五種特殊的飛行機理,來解釋昆蟲如何通過拍打翅膀獲取足夠的驅動力。
1) 延遲失速。翅翼在迎角增大的過程中,流經前緣的氣流會與翼面分離,產生逐漸遠離的前緣渦,進而使氣流無法附著于翼面,便會出現失速現象。而撲翼運動在每一次拍動的開始,其前緣都會形成渦結構,并且在整個拍動過程中保持附著于翅膀上,即使在隨后的拍動過程中,前緣上附著的渦也不會發生脫落。此外由于翅膀的平動運動,還存在著從翼根往翼尖方向的展向流動,這也對前緣渦起到了穩定作用,從而避免失速。
2) 拍合機制。在整個翅翼拍合過程中,第一階段是兩翅翼合攏,雙翅產生的前緣渦流相互抵消,同時后緣向內旋轉并合攏,使逐漸減小的渦流脫落,并由于擠壓快速噴出。第二階段是雙翅分離,前緣快速向外打開,使得氣流受壓強影響流入上翼面,形成前緣渦,而后后緣分離。拍合機制能夠為昆蟲提供瞬間的高升力,許多飛行生物依靠這種機制實現快速起飛,如蝴蝶、果蠅和飛蛾。
3) 旋轉環流機制。在撲翼運動結束前,昆蟲可以通過快速加速或快速向上運動,迅速產生不同方向的強旋渦,以增加升力。
4) 尾流捕獲機制。當撲翼運動處于下撲與上撲轉換階段,翅翼在相反的方向會將遇到上半個周期產生的空氣流動。由于翅翼與氣流的相互作用可以將上半個周期浪費的氣動力得以再次利用,使翅翼增加額外動力。
5) 附加質量效應。在撲翼飛行的過程中,翅膀的撲動方向會不斷的改變,伴隨著急加速以及急減速的現象,翅膀與流體之間便會出現較大的速度差,從而使得翅膀在推動氣流的過程中會受到氣流的反作用壓力。
作為唯一的哺乳飛行生物,蝙蝠在很長一段時間里被認為和鳥類的飛行方式是相同的。然而,近些年對蝙蝠飛行機理的研究表明,蝙蝠和鳥類的飛行方式是截然不同的。文獻研究發現當蝙蝠以低速飛行時,翅膀會迅速向上移動,并在整個拍打過程中產生升力;鳥類兩翼尾跡區的尾渦將合并成單個渦環,但蝙蝠兩翼尾跡區的尾渦相對獨立。前緣渦是在慢速飛行時產生的,但在懸停時不會產生。當機翼向上拍動時,前緣渦在機翼內外快速旋轉,并與機翼一起移動。這種飛行模式對蝙蝠來說非常高效節能,這表明蝙蝠可以主動控制前緣渦流的產生,以獲得更好的飛行能力。到目前為止,撲翼飛行機理研究主要通過3種方式:
1) 風(水)洞模擬實驗。通過風(水)洞模擬飛行器的運動和風(水)向風(水)速等環境條件,測量出飛行器的流場。
2) CFD(計算流體動力學)技術。利用CFD技術進行模擬計算。
3) PIV(圖像測速)技術。通過測量示蹤粒子在已知很短時間間隔內的位移來間接地測量流場的瞬態速度分布。
但是,撲翼飛行器在低雷諾數下的空氣動力學及其穩定性問題的許多結論沒有具體的理論,而是建立在仿真模擬的基礎上,需要進一步開展系統性研究。一方面可以幫助深入了解生物本身的運動特性,另一方面提高了后續動力學建模等工作的準確性。
文獻[37]提出了讓撲翼飛行器模型通過磁懸浮和平衡系統(MSBS)固定在風洞測試部分的中心,因為機械支撐,所以測量作用在模型上的氣動力和力矩數據消除了支持干擾。在研究氣動力的問題上目前最常用的是CFD算法的數值仿真。CFD方法最大的優點就是準確性高,但是效率不高。追求準確高效的非定常氣動力建模和分析方法,是計算流體領域的重要研究課題。
文獻[39]使用了基于相位平均粒子圖像測速技術,利用流場速度測量來估計小展弦比機翼的升阻特性。文獻[40]采用了ADAMS-XFlow聯合仿真的方法進行撲翼飛行器翅翼撲動頻率與來流速度對其氣動特性的影響。文獻[41]開發了一個新的氣動力測量平臺,用于測試鳥類自由飛行推進性能,為未來校準自然動物飛行推進性能的非定常氣動效應提供了一種有前景的測量技術。此外,隨著三維時間分辨PIV測試技術的出現,基于旋渦動力學的壓力估算方法也開始應用于仿生流動機理的研究。
3.2 撲翼機構運動學
撲翼飛行器的撲翼機構主要分為2個大類,純機械撲翼機構與智能材料撲翼機構。
純機械撲翼機構主要可以分為基于電機的撲翼驅動機構、基于電磁鐵的撲翼驅動機構和靜電撲翼驅動機構。基于電機的撲翼驅動機構主要有單曲柄雙搖桿機構、雙曲柄雙搖桿機構、曲柄滑塊機構、空間連桿機構等。單曲柄雙搖桿機構通過一個做回轉運動的曲柄,在連桿的作用下使兩個搖桿擺動。該機構的優點是結構簡單,具有較高的傳動效率,缺點是兩側撲翼運動相位不對稱使得飛行器兩側受力不均降低了飛行器的穩定性。雙曲柄雙搖桿機構通過齒輪帶動兩側曲柄旋轉,再帶動搖桿做撲動運動,與單曲柄雙搖桿相比,雖然增加了整體的質量和摩擦損耗,但解決了兩側撲翼的不完全對稱問題,大大提升了整體的穩定性和氣動性能。曲柄滑塊機構則是曲柄通過連桿帶動中間滑塊運動,滑塊再通過連桿帶動兩側搖桿進行往復撲動。這種機構的對稱性較好,整體穩定性強,但增加了傳動件數量導致在能效性方面略有欠缺。空間連桿機構形式多樣,在結構方面的靈活性很大,在性能上優于平面機構,但其設計與分析較為復雜,在控制方面難度較大。
文獻[44]模仿蜂鳥,設計了手掌大小的微型撲翼飛行器,質量約9 g,通過二級齒輪、曲柄搖桿機構和線機構,實現了雙翼的拍合機制,在同樣的電壓和拍打角幅值下,與無拍打機的撲翼機構進行對比,升力提升了17.5%。文獻[45]在研究著陸飛行中鳥類撲翼特性的基礎上,開發了一種能夠產生三自由度運動(撲翼、扭轉和擺動)的撲翼機構,可以將動力源的旋轉運動轉化為三自由度輸出的協調運動,但為了實際應用,通過更改關節連接特征減少了擺動的自由度,但仍然對今后撲翼飛行器翅膀的設計有一定參考意義。
為了實現撲翼飛行器的輕量化設計并增加續航時間,研究人員對基于電磁鐵的撲翼驅動機構和靜電驅動撲翼機構也開展了很多研究。基于電磁鐵的撲翼驅動機構主要原理是利用通電導體或磁性物體在磁場中受到驅動力使得撲翼進行運動,靜電驅動多用于微撲翼飛行器中,在交流電壓的作用下,基于受迫振動原理來驅動雙翼。
文獻[46]研制了一款基于電磁鐵的撲翼驅動機構,該機構利用磁性體在磁場中受吸合力作用的原理實現了翅翼的撲動、扭轉運動。文獻[47]提出了一種電磁驅動人工撲翼昆蟲柔性鉸鏈的設計方法,實現了50°的最大機翼旋轉角度和±50°的撲動幅度,通過這種方法提升了雙翼提供的升力。文獻[48]設計了一種結構簡單、操作簡單的自激靜電撲翼機構,該機構無需復雜的交流驅動電路,即可在直流電源下激發諧振,驅動兩個昆蟲翅膀進行往復旋轉運動,從而產生足夠高的有效升力。
在驅動端,對于較大尺寸的撲翼飛行器而言,大多采用電機來進行驅動。但是電機作為驅動器不利于微型化設計,且會對整機的質量產生很大的負擔,因此,研究人員一直在尋找更好的替代方案。隨著材料科學的發展與研究,研究人員開始將撲翼機構的目光投向新的方向,利用智能材料設計撲翼飛行器的撲翼機構,能夠進一步完成撲翼飛行器的輕量化設計,成為在微型撲翼飛行器上替代電機的合理選擇。在尋找智能材料的過程中,形狀記憶合金(SMA)、形狀記憶聚合物(SMP)和電化學-機械傳導聚合物(EMCP)都曾被考慮,這些智能材料具有較大的自由應變度以及高電阻,但是響應速度慢,無法滿足撲翼飛行器高速運動的需求。因此,壓電致動器和介電彈性體(DEA)由于具有響應速度快、功耗低、輸出力大和定位精度高等優點,成為毫米級撲翼飛行器上代替電機的優秀選擇。哈佛大學的Wood教授在研制的RoboBee微型撲翼飛行器上采用了壓電致動器,取得了良好的效果。介電彈性體具有大應變、高輸出能量密度、響應速度快和噪聲低等優點,北俄亥俄大學團隊使用了人造肌肉這一介電彈性體,成功驅動了質量約15 g的飛行器。但是在目前技術條件下,壓電驅動單元有效驅動電壓較高,升壓電源模塊很難微型化。基于功能材料致動器的微型撲翼飛行器,目前還難以實現機載能源方式的自治飛行。
3.3 撲翼機構動力學
與目前的仿生飛行器相比,鳥類、昆蟲和蝙蝠的飛行效率高、飛行噪音低以及較強的機動性和穩定性,這些優秀的特征與其翅膀結構有密切的關系。因此,對撲翼機構動力學進行分析,根據分析結果不斷改善撲翼機構的動態性能,是仿生飛行器不斷進步的一大途徑。
微型撲翼飛行器是一種非線性時變系統,在進行穩定性分析時,主要采用2種方法:
1) 平均法。使用平均振蕩周期內的系統動力學來獲得非線性時不變(NLTI)系統模型。為了確定固定點的指數穩定性,可以簡單地線性化NLTI系統以獲得線性時不變(LTI)模型并檢查LTI系統的狀態矩陣的特征值。但是,平均法對周期值有嚴格要求,其適用于機翼頻率要遠大于系統模型自身的飛行運動頻率的一類生物。目前,一階平均法在微型撲翼飛行機器人的動力學分析中已經得到廣泛的使用。
2) Floquet理論。Floquet理論可以應用于自治系統和非自治系統,可以用來分析線性時變周期(LTP)系統的穩定性。其對周期值沒有要求,適用范圍更廣,可用于一些翅膀拍打頻率接近機身頻率的大型鳥類。但是,到目前為止,還沒有完全非線性時變周期分析應用于到撲翼飛行機器人的動力學分析上,這是今后需要進一步研究的方向。
文獻[57]基于Delaurier條帶理論設計了一種曲柄連桿撲翼驅動機構,并驗證了在非對稱撲動規律下,該機構能夠產生更強的飛行升力。文獻[58]使用理想流體理論研究了翼面的升力特性,引入了彈性裝置,減小了翅翼撲動時構件之間的沖擊力,增強了整機的穩定性和使用壽命。文獻[59]利用準穩態氣動模型對電磁驅動機構進行了優化設計,證明了在固有頻率驅動機翼的情況下能夠最大限度地提高翅翼機構的氣動升力和能量利用率。文獻[60]通過建立2個自由度的尾翼動力學簡化模型,引入柔性變形度并給出氣動特性的計算方法,分析了形狀、材料和角度對尾翼動力學性能的影響規律,并通過XFlow軟件仿真驗證了理論模型的準確性。文獻[61]建立了“拍動+內折疊+外折疊+扭轉”的三段式撲翼模型,分別研究撲翼的各個參數對飛行器氣動力學性能的影響。
3.4 撲翼飛行器的結構與材料
輕而堅固的材料以及合理的結構設計能夠在很大程度上減小飛行器的續航壓力,也能夠使飛行器擁有更高的氣動效率以及能量利用率。撲翼飛行器對材料要求很高,必須在低質量的前提下,能夠承受高頻振動。
對于目前的撲翼飛行器,碳纖維復合材料以其高強度低密度的優良特性廣泛應用于飛行器的主體以及翅翼骨架的制造上,通過在單一材料表面覆蓋碳纖維材料以此提高其強度也是可行的辦法之一。除此之外,如何設計出像昆蟲一樣靈活的雙翼,并且在飛行的過程中,可以控制其形狀,也是未來撲翼飛行器輕量化設計制造的研究方向。
為了實現撲翼飛行器的輕量化設計,需要對制造工藝進行進一步的研究。近年來,MEMS制造技術、激光切割技術、真空膜技術、熱軋加壓技術等先進制造技術的發展為撲翼飛行器的輕量化設計提供了基礎。
克蘭菲爾德大學在機翼的選擇上采用了可拉伸的聚酯薄膜,在增加推力的同時,減少了因為翅膀拍打產生的噪音,提高了飛行器的隱蔽性。浙江大學的廖偉以海鷗為藍本,設計了一種可折疊機翼,機翼結構分為內翼和外翼,可以模擬鳥類的飛行。向上拍打時,機翼可以折疊以減小阻力,向下拍打時,機翼可以展開以增加升力,通過這種飛行方式提高了飛行效率。文獻[70]使用分布式翼片對柔性翼進行優化,減小了誘導阻力,提升了機翼的性能。文獻[71]提出了利用硅作為雙翼的材料,在納米結構的作用下,將機翼的彎曲強度提高了6倍,反射率降低到2%。由于硅的彎曲強度提高,機翼的厚度可以小于100 μm。這可以有效地減輕飛機的質量,有助于改進撲翼飛行器設計標準。
3.5 撲翼飛行器的建模與控制算法
對于撲翼飛行器的控制系統設計而言,主要難點在于模型的建立與控制算法上。不同于旋翼飛行器,撲翼飛行器的模型構建較為復雜,特別是為了提高飛行器整體的氣動效率,往往會使用可變形翅膀或機體,進一步增加了建模難度。另一方面,撲翼飛行器的控制算法設計也相當復雜,撲翼飛行器的高機動性要求控制系統要有很快的響應速度,除此之外,撲翼飛行器的質量相對較小,對環境不穩定氣流干擾非常敏感,要求控制系統要具有很強的抗風性能,也是制約目前撲翼飛行器工程化的主要因素之一。
在建模方面,目前常用的動力學建模方法是剛體的牛頓-歐拉法,其主要思想是利用運動螺旋和力螺旋建立動力學方程。然而,由于撲翼飛行器的運動方式過于復雜,在建模過程中需要進行一定的簡化,按照簡化程度,大致可以分為三類近似模型:忽略機翼動力學特征,僅包括機體動力學;包括在剛性機翼運動時的機翼慣性項;考慮彈性變形機翼和剛性機身的系統動力學。
3種模型簡化程度依次遞減,但都是在考慮剛性或小變形假設前提下簡化得到的,并且忽略了結構變形運動與非定常氣動力之間的交互耦合作用。事實上,目前大多數撲翼飛行器都是采用的大變形柔性翼。機翼的剛度與撲翼飛行器主翼拍動頻率是否匹配,直接影響飛行器的飛行氣動能效性。這是影響多數撲翼飛行氣動效率和連續飛行時長的主要因素之一。
拉格朗日法同樣可以用于撲翼飛行器的建模中,通過計算飛行器系統的動能和勢能,可以建立剛柔耦合多體系統的運動方程。但是,使用拉格朗日法對撲翼飛行器進行建模需要建立連接剛體的質量分布模型,同時,需要進行大量的微分運算,計算量較大。凱恩法兼顧了牛頓歐拉法和拉格朗日方法的優點。但凱恩法需要引入已知物理量進行表示,增加了建模過程的復雜性,且凱恩法建模的準確性在實際機電系統應用中很少得到驗證。文獻[75]采用擬坐標拉格朗日方程進行了多體動力學建模,減少自由度,降低了建模過程中的計算量。除了以上傳統的動力學建模方法,還有一種結合飛行數據進行動力學建模的方法,其基本思想是從撲翼飛行的飛行數據中識別局部線性模型,然后確定一組插值函數將這些模型組合成一個全局線性參數變化(LPV)模型。文獻[77]運用了此方法進行建模,避免了高階模型結構和全局識別實驗。文獻[78]采用幾何形態建模方法,基于微分幾何方法,通過將每個橫截面近似為橢圓,重新構建了機翼的幾何形狀,然后進行動力學建模。
基于系統辨識方法建立的模型是使用觀測輸入輸出數據的數學建模技術,因此,此模型能夠準確反映系統的輸入輸出關系,具有很高的精度。目前,飛行器氣動參數常用的辨識方法有最小二乘法、極大似然法、卡爾曼濾波法。最小二乘法采用遞推方式不斷對待辨識參數進行修正,最終獲得準確的辨識結果,其對象通常為線性模型,在非線性模型中無法直接通過最小二乘法求解,需要通過其他方式將模型轉化為近似線性,一定程度上增加了過程的復雜度。極大似然法是將氣動參數辨識問題轉換為似然函數的泛函極值問題,通過優化算法求取函數優化問題的解。該方法通常需預知過程噪聲和觀測噪聲的統計特性,且誤差協方差陣的計算較復雜,計算量大,在非線性情況下濾波容易發散。卡爾曼濾波法其基本思想是將待辨識參數作為狀態參數,并將其增廣到狀態矢量,采用卡爾曼濾波算法對增廣后的狀態進行估計,當待辨識參數達到穩定時即得到參數的最優估計。
撲翼飛行器一般體積較小,質量較輕,對外界干擾非常敏感,而撲翼飛行器應用場景的飛行條件一般較為復雜,要求撲翼飛行器要有很好的自適應能力。因此,在設計撲翼飛行器的控制器時,通常著重考慮飛行器整體的抗干擾性,在旋翼飛行器上普遍使用的PID控制算法無法滿足撲翼飛行器的控制需求,將智能控制策略引入到撲翼飛行器的控制系統中具有重要意義。
對飛行器的控制,可以分為位置控制和姿態控制。文獻使用螺紋連接,通過伺服電動機將機翼拉到預設點,來完成對撲翼飛行器的姿態控制。文獻[84]設計了一種擴展狀態觀測器,并在此基礎上,提出了一種基于動態逆方法的輸出反饋控制器,以解決由于轉動慣量的不確定性而導致的控制特性的非仿射性。文獻提出了一種自抗擾控制(ADRC)結構,以優化微型撲翼飛行器在自動著陸過程中的姿態控制。文獻[86]采用自適應控制器消除參數不確定性,采用魯棒控制器來衰減未知動態,提出一類基于Lyapunov穩定性理論的不確定非線性系統自適應魯棒控制方法。文獻[87]提出了一種自適應模糊控制方法,用于抑制或跟蹤機翼的動態行為。把模糊邏輯系統(FLS)方法用于辨識近似未知的非線性動力學,利用變論域技術修改FLS參數以提高差值精度,實現了實時控制。
撲翼飛行器的嚴苛輕量化設計需求,使得其控制器系統硬件通常只能采用嵌入式系統設計控制器、采用少量簡單模擬器件設計功率放大器。由于計算速度、存儲資源、輸出功率飽和等實際限制,較為復雜的系統閉環控制律很難在這些簡單硬件平臺上充分實現。基于離線或在線技術,通過辨識、學習、自適應、自修正撲翼飛行器的結構和慣性參數,獲得精準的系統動態模型,并進一步優化控制器控制參數,提高閉環系統的穩定域和抑制干擾的魯棒性,是有效改善撲翼飛行器運動能效性、靈活性、帶載能力的一條現實途徑。
4 撲翼飛行器發展的機遇與挑戰
撲翼飛行器是當前仿生機器人的熱門發展方向。人們對撲翼飛行器性能改善的不斷追求,必將為撲翼飛行器的發展注入新的活力,帶來新的機遇與挑戰。
為了探索改進撲翼飛行器氣動能效性的有效方法,需要繼續深入研究非定常非線性空氣動力系統的力學建模和分析方法。由于撲翼飛行是在低雷諾數下進行的,傳統的固定翼和旋翼飛行器設計理論不能適用。目前,多采用風(水)洞實驗以及CFD模擬計算的方法進行飛行機理的探究。因此深入開展大變形薄膜結構與空氣渦流之間的交互耦合動力學分析和實驗研究,是擺在計算流體力學研究領域科研人員面前的一項重要研究課題。揭示撲翼飛行生物駕馭非定常非線性流體運動,提高自身運動能效性、靈活性、穩定性的內在力學機制,是實現仿生撲翼飛行器樣機技術水平有效提高的重要學科基礎問題。目前,針對鳥類、蝙蝠等脊椎動物的高升力產生機制研究不足,難以建立精確的穩態或準穩態力學模型。
在結構與材料方面,需要探究新的材料、制造工藝和能源策略,如探索低密度、高強度、高剛性/高彈性結構材料設計制備方法;高轉化效率功能材料與器件的制備技術;高效高功率密度比的微型原動件設計制造技術;3D結構材料的高效拓撲優化設計方法;復雜結構復合材料的3D打印技術;生物材料與生物神經調控技術的深入研究和實踐等,都是現階段值得深入研究的重要課題。值得一提的是,隨著撲翼飛行器的尺度減小,粘性效應愈加顯著,微型撲翼飛行機器人實現低雷諾數空氣動力學范圍內的機動效率大幅降低,而這類撲翼飛行器面臨的升力優化的問題更加迫切。以提升撲動機構能效性為核心,采用柔順機構取代傳統運動副,降低機構損耗,是當前微型撲翼飛行器樣機設計中通常采用的系統方案。但是多層復合材料的高精度微細加工制造技術,對加工設備性能水平依賴性很強,是發展微型撲翼飛行器樣機制造技術的一個難題。
在系統建模方面,撲翼飛行器是一類多輸入多輸出、非定常、非線性動態系統。目前,高性能撲翼飛行器實驗樣機,均采用大變形柔性機翼、可變形機翼、鏤空輕量化機體,難以進行精準動力學建模和分析。同時,撲翼飛行器作為一種移動載體,需要搭載各種的功能單元。在機載系統還難以高度集成化、微型化設計制造的條件下,為了獲得較為精準的系統動力學模型,通常采用基于系統辨識的建模方法。基于離線或者在線系統辨識的建模方法,無需過多考慮飛行器本體硬件的具體細節,對實現撲翼飛行器的穩定控制具有一定的技術優勢。
在控制器設計方面,面對實際應用,不僅需要考慮撲翼飛行器的復雜系統動力學性質特征,還要考慮工程實現的可行性。傳統的單一、集總系統控制算法,很難滿足撲翼飛行器這類大變形柔性結構、變體飛行、交互耦合動態系統、驅動能源功率非常有限的多自由度機電系統控制需求。針對不同的飛行模式、環境情況以及飛行任務,在一個撲翼飛行器上設計可重構控制器,基于切換策略、調度策略、自適應策略輔助下,選擇不同的控制器或多控制器并行使用來對機體進行控制,是一個值得深入探索研究的方向。另外,借助基因工程技術,有效利用生物體自身的結構材料、神經肌電系統,實現生物的可控飛行,是一個值得高度關注的研究方向。
在應用方面。目前的撲翼飛行器樣機大多處于實驗室階段,多數樣機幾乎沒有除了飛行以外的功能。在未來的應用中,如何提高機體的負載能力,將其他功能模塊合理的搭載在機體上,同時提高機體的隱蔽性,都是值得思考與研究的問題。
5 結論
撲翼飛行器是多學科深度交叉融合的研究對象,開展相關技術研究可以深入促進先進材料、先進控制、非定常空氣動力學等領域的研究、發展和應用,無論是在學術研究方面,還是在應用方面,都具有深刻的實際意義。本文綜合近20余年國內外主要撲翼飛行器樣機的研究發展,討論了國內外關于撲翼飛行器的種類、主要指標現狀、關鍵技術等方面的研究內容與成果。在綜合分析這一領域研究現狀的基礎上,對于未來撲翼飛行器發展方向和重要研究課題進行了討論,以期為同行提供參考。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04