一種邊緣檢測(cè)方法在頭足類角質(zhì)顎識(shí)別中的應(yīng)用
2022-09-02 01:53:44王冰妍劉必林顧心雨
漁業(yè)現(xiàn)代化 2022年4期
王冰妍,劉必林,顧心雨
(1 上海海洋大學(xué)信息學(xué)院,上海 201306;2 上海海洋大學(xué)海洋科學(xué)學(xué)院,上海 201306;3 大洋漁業(yè)資源可持續(xù)開(kāi)發(fā)教育部重點(diǎn)實(shí)驗(yàn)室, 上海 201306;4 國(guó)家遠(yuǎn)洋漁業(yè)工程技術(shù)研究中心,上海 201306;5 農(nóng)業(yè)農(nóng)村部大洋漁業(yè)開(kāi)發(fā)重點(diǎn)實(shí)驗(yàn)室,上海 201306;6 農(nóng)業(yè)農(nóng)村部大洋漁業(yè)資源環(huán)境科學(xué)觀測(cè)實(shí)驗(yàn)站,上海 201306)
邊緣檢測(cè)(Edge detection)是利用計(jì)算機(jī)視覺(jué)處理圖像的一種基本方法,其原理是標(biāo)識(shí)數(shù)字圖像中亮度變化明顯的像素點(diǎn),圖像中像素的顯著變化通常反映了圖像的重要特征[1],因此邊緣檢測(cè)被廣泛應(yīng)用于計(jì)算機(jī)視覺(jué)和圖像處理的研究中,尤其是特征提取的研究。傳統(tǒng)的邊緣檢測(cè)算子包括Sobel算子[2]、Prewitt算子[3]、Canny算子[4]等,其中Canny算子是最常用的邊緣檢測(cè)方法,具有低錯(cuò)誤率、高定位性、最小響應(yīng)的優(yōu)點(diǎn)[5-6]。隨著計(jì)算機(jī)視覺(jué)技術(shù)在生產(chǎn)生活中的應(yīng)用與發(fā)展,人們研發(fā)出各種改進(jìn)的算法,提高了生活質(zhì)量與工作效率,如徐武等[7]研究的基于改進(jìn)Canny算子的圖像邊緣檢測(cè)方法中,采用雙濾波設(shè)計(jì)代替高斯濾波,采用Otsu算法自適應(yīng)計(jì)算高低閾值,自適應(yīng)能力強(qiáng)、去噪效果好,邊緣提取更完整。
角質(zhì)顎是頭足類口球內(nèi)的幾丁質(zhì)硬組織,具有形態(tài)結(jié)構(gòu)穩(wěn)定、耐腐蝕的特點(diǎn),能夠良好地儲(chǔ)存頭足類的生物信息[8]。其形態(tài)特征的研究一般基于特征點(diǎn)的標(biāo)定以及特征參數(shù)的提取,通過(guò)游標(biāo)卡尺的手動(dòng)徑向測(cè)量法是獲取角質(zhì)顎形態(tài)參數(shù)的傳統(tǒng)方法[9]。近年來(lái),人工智能技術(shù)被越來(lái)越多地利用在角質(zhì)顎生物形態(tài)研究[10],如宋自根等[11]采用Mask-RCNN深度學(xué)習(xí)的神經(jīng)網(wǎng)絡(luò)模型,實(shí)現(xiàn)了角質(zhì)顎色素沉積的識(shí)別,為角質(zhì)顎等生物信息研究提供了新的方法與思路;賀芊菡等[12]采用Canny邊緣檢測(cè)算法提取角質(zhì)顎輪廓圖,以輔助標(biāo)定特征點(diǎn)并提取特征參數(shù),實(shí)現(xiàn)了利用計(jì)算機(jī)技術(shù)進(jìn)行角質(zhì)顎形態(tài)特征的研究,改善了傳統(tǒng)人工測(cè)量存在的耗時(shí)耗力等問(wèn)題。但由于Canny算子具有低錯(cuò)誤率的特性,在圖像處理過(guò)程中無(wú)可避免會(huì)產(chǎn)生與研究不相關(guān)的冗余邊緣信息,包括由圖像背景環(huán)境中的噪聲、圖像中檢測(cè)目標(biāo)的紋理信息等產(chǎn)生[13-14]。并且對(duì)于閾值的把控要求很高[15],極易使提取的目標(biāo)輪廓產(chǎn)生缺損。這將導(dǎo)致后續(xù)研究中產(chǎn)生誤差,同時(shí)也限制了利用計(jì)算機(jī)視覺(jué)技術(shù)進(jìn)行研究的范圍。
本研究基于計(jì)算機(jī)視覺(jué)研究一種邊緣檢測(cè)算法,并應(yīng)用在頭足類角質(zhì)顎的識(shí)別中,旨在能夠準(zhǔn)確提取角質(zhì)顎外輪廓,并減少甚至消除在邊緣檢測(cè)中產(chǎn)生的冗余邊緣信息,為進(jìn)一步研究奠定基礎(chǔ)。
1 材料與方法
1.1 材料來(lái)源及圖像采集
本研究以30尾中東太平洋莖柔魚、30尾西北太平洋柔魚、30尾中東大西洋翼柄柔魚共90尾角質(zhì)顎上顎作為研究對(duì)象,樣本保存于盛有70%的乙醇溶液的試管中,拍攝時(shí)用鑷子取出角質(zhì)顎并洗凈表面黏液。
在圖像采集過(guò)程中,使用三腳架固定相機(jī),使鏡頭視角平行于桌面。所用相機(jī)分辨率為200萬(wàn)像素,光圈為F3.5,快門速度為1/50 s,ISO為3 200。將角質(zhì)顎樣本水平放置于藍(lán)色卡紙,同時(shí)根據(jù)拍攝效果打光,以減小光照對(duì)圖像效果的影響。采集角質(zhì)顎的側(cè)視圖圖像如圖1,并將其保存為JPEG(Joint Photographic Experts Group)或PNG(Portable Network Graphics)文件格式。

圖1 角質(zhì)顎彩色二維側(cè)視圖
1.2 Canny算子
Canny邊緣檢測(cè)算子是一種多級(jí)邊緣檢測(cè)算法,相比普通的梯度算法,Canny算子能夠有效抑制噪聲引起的偽邊緣并實(shí)現(xiàn)邊緣細(xì)化,是邊緣檢測(cè)的一種標(biāo)準(zhǔn)算法,在眾多領(lǐng)域包括生物學(xué)領(lǐng)域的研究中應(yīng)用廣泛,通常分為以下5個(gè)步驟實(shí)現(xiàn)[16]:
(1)圖像灰度化通常采用加權(quán)法計(jì)算,計(jì)算方法有以下兩種:
Gray(x,y)=0.114 0×B(x,y)+0.587 0×G(x,y)+0.298 9×R(x,y)
(1)
Gray(x,y)=0.114 0×R(x,y)+0.587 0×G(x,y)+0.298 9×B(x,y)
(2)
式中:(x,y)為像素點(diǎn)坐標(biāo),R(x,y)、G(x,y) 、B(x,y)分別為該像素點(diǎn)的RGB三通道色彩空間中的紅色分量、綠色分量和藍(lán)色分量,Gray(x,y)為計(jì)算所得該像素點(diǎn)的灰度值。
(2)高斯濾波處理。高斯濾波是一種線性濾波器,能夠抑制噪聲,平滑圖像。高斯濾波器模板的生成,基于二維高斯函數(shù)h(x,y)的離散化取樣,計(jì)算得到模板系數(shù)Hx,y。對(duì)于(2k+1)×(2k+1)的窗口模板,模板中心像素值為[17]:
(3)
(4)
(3)用一階偏導(dǎo)的有限差分來(lái)計(jì)算梯度的幅值和方向。圖像邊緣的方向具有不確定性,在經(jīng)典Canny算法中分別計(jì)算了水平、垂直兩個(gè)方向的梯度幅值:
(5)
(6)
式中:Gray(x,y) 為坐標(biāo)為(x,y)的像素點(diǎn)的灰度值,由Px[x,y]與Py[x,y]計(jì)算得到(x,y)處梯度的幅值M(x,y)與方向θ(x,y)[18]:
(7)
(8)
(4)梯度幅值的非極大值抑制。如當(dāng)前像素的梯度幅值為局部極大值,即其梯度幅值均大于梯度方向上與八鄰域兩交點(diǎn)處的梯度幅值,則保留該像素點(diǎn)為邊緣,否則將抑制。
(5)選擇雙閾值連接邊緣。設(shè)置一個(gè)高閾值與一個(gè)低閾值,當(dāng)像素點(diǎn)的梯度值大于高閾值時(shí)被認(rèn)為是強(qiáng)邊緣,當(dāng)像素點(diǎn)的梯度值小于高閾值而大于低閾值時(shí)被認(rèn)為是弱邊緣,否則被抑制。
1.3 本研究的邊緣檢測(cè)方法
1.3.1 算法流程
本研究的方法主要通過(guò)圖像灰度化、濾波去噪、圖像二值化、構(gòu)造目標(biāo)連通域、提取邊緣輪廓5個(gè)步驟,實(shí)現(xiàn)邊緣檢測(cè)具體流程如圖2。
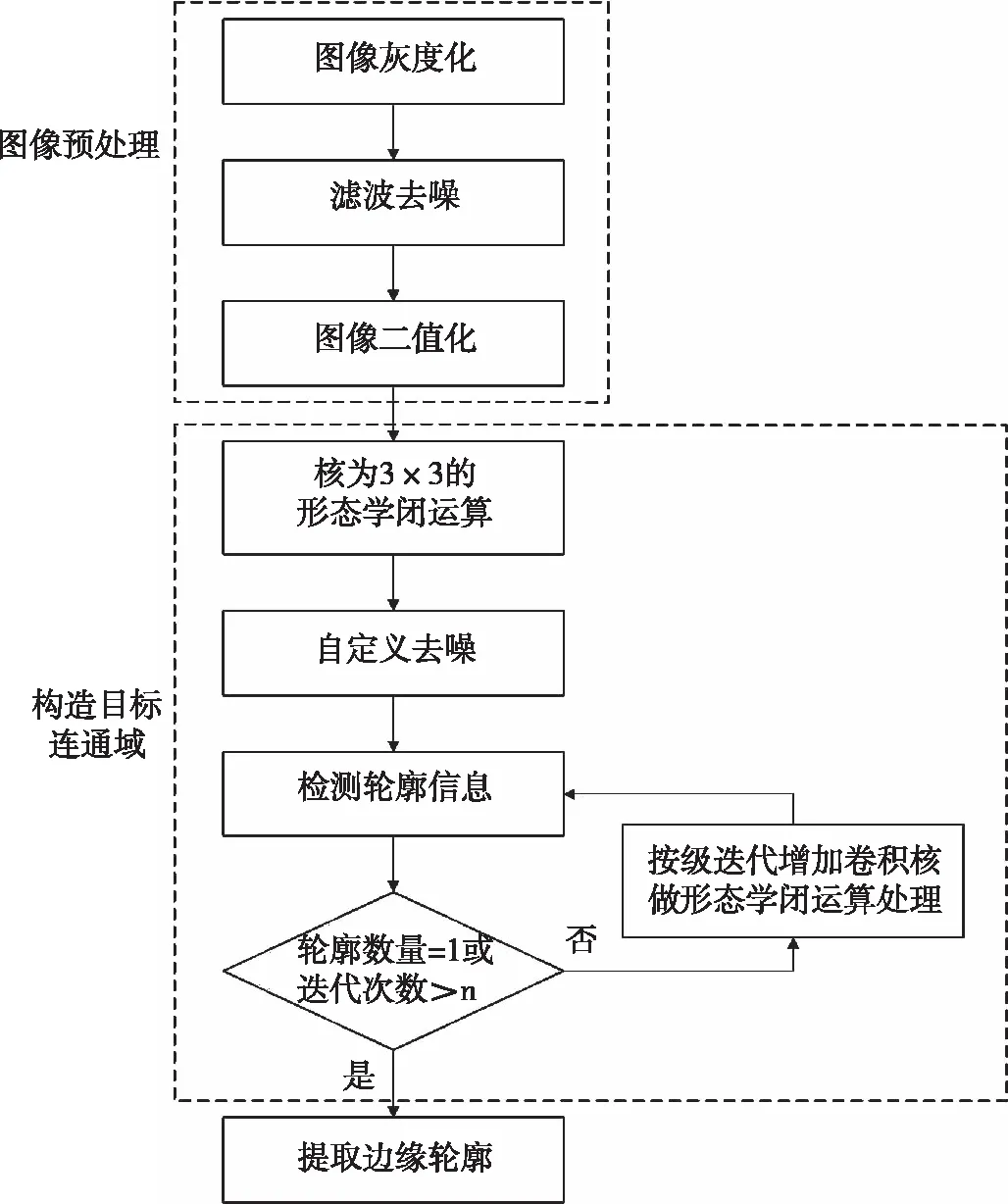
圖2 邊緣檢測(cè)流程示意圖
1.3.2 圖像灰度化
在邊緣檢測(cè)中,認(rèn)為有效信息為物體的邊緣信息,因此需要對(duì)圖像的梯度信息進(jìn)行分析處理。雖然三通道的圖像所反映的梯度信息更完整,但一個(gè)像素點(diǎn)的顏色取值有2563種,使運(yùn)算速度極大受限,也增大了運(yùn)算的存儲(chǔ)負(fù)擔(dān)。因此,對(duì)圖像進(jìn)行灰度化處理,即對(duì)圖像矩陣進(jìn)行降維,既可以使運(yùn)算速度得到大幅提高,也能夠保留邊緣檢測(cè)所需要的梯度信息。同時(shí),又滿足了OpenCV庫(kù)函數(shù)在作圖像處理時(shí)對(duì)輸入圖像的格式要求。本研究中對(duì)彩色圖像中每個(gè)像素點(diǎn)的3個(gè)顏色分量R、G、B分別按照0.298 9、0.587 0、0.114 0的比例加權(quán)計(jì)算,得到灰度化圖像。本研究選擇如下方式計(jì)算:
Gray(x,y)=0.114 0×B(x,y)+0.587 0×G(x,y)+0.298 9×R(x,y)
(9)
1.3.3 濾波去噪
過(guò)濾可以減少圖像中的噪聲,增強(qiáng)感興趣的可視特征,是圖像處理中的重要環(huán)節(jié)[19]。本研究使用雙邊濾波(Bilateral filter)對(duì)圖像作去噪處理,這是一種非線性的濾波方法[20],對(duì)于待處理的像素點(diǎn),結(jié)合其空間鄰近度和像素值相似度作折中處理,即同時(shí)考慮空域信息σd和灰度相似性σr兩個(gè)因素。在圖像的頻域分析中,邊緣檢測(cè)需要增強(qiáng)高頻波段、抑制低頻波段,圖像中的邊緣信息即為高頻信息,而雙邊濾波恰好能夠很好地保存高頻信息,過(guò)濾低頻噪聲,達(dá)到保邊去噪的目的。對(duì)于每一個(gè)像素點(diǎn)值的計(jì)算方法為:
(10)
式中:(i,j)是當(dāng)前被卷積像素的坐標(biāo),(k,l)是鄰域像素的坐標(biāo)點(diǎn),w(i,j,k,l) 為權(quán)重系數(shù),取決于定義域核及值域核的乘積,即[21]:
(11)
1.3.4 圖像二值化
在灰度圖像的基礎(chǔ)上,對(duì)圖像做二值化處理,將灰度圖像的256個(gè)亮度級(jí)在合適的閾值下進(jìn)行分割,使圖像的像素值只由0與255兩個(gè)數(shù)值呈現(xiàn)。其中,目標(biāo)輪廓的像素值為255,顯示為白色;其余像素的值均為0,顯示為黑色。經(jīng)過(guò)二值化處理的圖像呈現(xiàn)出黑白效果,進(jìn)一步減少了圖像中的數(shù)據(jù)信息[22],更加凸顯出目標(biāo)輪廓,同時(shí)也適應(yīng)了OpenCV庫(kù)中輪廓檢測(cè)函數(shù)對(duì)輸入圖像的格式要求,為進(jìn)一步圖像處理奠定了基礎(chǔ)。
OpenCV庫(kù)中實(shí)現(xiàn)圖像的二值化處理有兩種方法:固定閾值和自適應(yīng)閾值。本研究中采用自適應(yīng)閾值二值化方法,閾值類型選擇黑白二值反轉(zhuǎn),自適應(yīng)方法選擇高斯加權(quán)均值,設(shè)置像素值上限為255。當(dāng)待處理的像素灰度值大于自適應(yīng)閾值時(shí),將該像素值處理為0;當(dāng)待處理的像素灰度值小于自適應(yīng)閾值時(shí),將該像素值處理為像素值上限[23],算法如下:

(12)
式中:maxValue為閾值上限,thresh為自適應(yīng)閾值。
1.3.5 構(gòu)造目標(biāo)連通域
針對(duì)二值化的圖像效果分析,目標(biāo)輪廓可能存在部分不連通的情況,且冗余輪廓信息主要出現(xiàn)在目標(biāo)輪廓內(nèi)部,主要由樣本表面的紋理產(chǎn)生,還存在由拍攝環(huán)境造成的光斑等其他一些因素產(chǎn)生。通過(guò)技術(shù)手段完全消除這些影響因素難度較高、成本較大,因此設(shè)計(jì)算法做進(jìn)一步圖像處理,消除冗余邊緣信息。
本研究設(shè)計(jì)算法思路,構(gòu)造目標(biāo)連通域,再進(jìn)行輪廓檢測(cè),實(shí)現(xiàn)邊緣輪廓提取。主要分為以下3個(gè)步驟實(shí)現(xiàn):
(1)采集輪廓信息。將相連的像素值為255的像素點(diǎn)保存在同一個(gè)列表中,定義為一個(gè)輪廓。使用輪廓檢測(cè)函數(shù)采集二值化圖像中的輪廓信息,由于目標(biāo)輪廓可能存在部分不連通的情況,因此不能夠只檢測(cè)最外側(cè)輪廓。選擇輪廓的近似方法為CHAIN_APPROX_NONE,采用樹(shù)形結(jié)構(gòu)輸出的檢索模式,檢測(cè)二值圖中的所有輪廓信息并保存,即以輪廓為單位,保存構(gòu)成該輪廓的像素點(diǎn)坐標(biāo)[24]。
(2)自定義去噪。先根據(jù)樣本在圖像中占據(jù)的像素比例,選擇一個(gè)合適的值m,將包含少于m個(gè)像素點(diǎn)的輪廓作為噪音從輪廓集中刪除,避免了目標(biāo)輪廓周圍的噪音對(duì)邊緣連通產(chǎn)生不利影響,有效降低了后續(xù)形態(tài)學(xué)處理時(shí)輪廓的形變程度。
(3)構(gòu)造目標(biāo)連通域。本研究結(jié)合形態(tài)學(xué)技術(shù)處理圖像,確保邊緣連通,構(gòu)造目標(biāo)連通域。新建一張單通道的黑色幕布,繪制經(jīng)過(guò)篩查的輪廓集,如果輪廓閉合則進(jìn)行填充。對(duì)去噪圖像采用一個(gè)3×3的結(jié)構(gòu)元素作一次形態(tài)學(xué)閉運(yùn)算處理,初步得到連通域的圖像。通常情況下,一次形態(tài)學(xué)閉運(yùn)算無(wú)法完全實(shí)現(xiàn)目標(biāo)分割[25]。再次檢索角質(zhì)顎輪廓,如果得到的輪廓集中的輪廓數(shù)量等于1,則表示已經(jīng)完成目標(biāo)連通域的構(gòu)造,直接進(jìn)行1.3.6節(jié)中的提取邊緣輪廓操作;如果輪廓數(shù)量大于1,理論上說(shuō)明填充的輪廓圖像仍然存在缺損,未形成一個(gè)完整的連通域,則圖像做如下進(jìn)一步處理:
①按級(jí)增大結(jié)構(gòu)元素,對(duì)圖像做形態(tài)學(xué)閉運(yùn)算處理;
②檢索圖像中的輪廓及其數(shù)量;
③重復(fù)①②直至輪廓數(shù)量為1。
同時(shí),為了避免圖像中存在面積較大且距離目標(biāo)較遠(yuǎn)的噪聲連通域未被去除,也為了防止形態(tài)學(xué)處理過(guò)度造成圖像變形嚴(yán)重,應(yīng)根據(jù)樣本在圖像中占據(jù)的像素比例,選擇一個(gè)合適的值n,確保(3)的執(zhí)行次數(shù)不超過(guò)n次。
1.3.6 提取邊緣輪廓
得到完全填充的邊緣輪廓圖像后,新建單通道黑色幕布,檢測(cè)并繪制出最長(zhǎng)輪廓。
2 結(jié)果與分析
2.1 關(guān)鍵處理過(guò)程
2.1.1 濾波去噪
對(duì)采集到的角質(zhì)顎樣本彩色圖像做灰度處理,再分別采用雙邊濾波和高斯濾波進(jìn)行平滑去噪(圖3)。其中,雙邊濾波需要根據(jù)具體圖像選擇合適的顏色空間的σr值和坐標(biāo)空間的σd值,本文中選用值為10、15;高斯濾波的卷積核設(shè)置為3×3。可以觀察到使用濾波前后的圖像效果對(duì)比明顯,顆粒狀噪聲基本得到平滑 ,而角質(zhì)顎仍保持形態(tài)清晰,形態(tài)特異性顯著。觀察局部放大圖(圖4),雙邊濾波的保邊效果顯著優(yōu)于高斯濾波,因此后續(xù)采用雙邊濾波做進(jìn)一步研究。
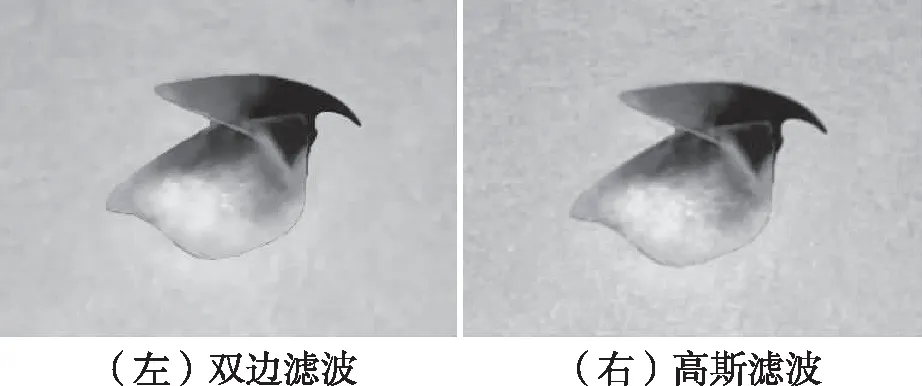
圖3 分別用雙邊濾波(左)和高斯濾波(右)處理后的角質(zhì)顎灰度圖像

圖4 分別用雙邊濾波(左)和高斯濾波(右)處理后的角質(zhì)顎灰度圖像局部放大圖
2.1.2 構(gòu)造角質(zhì)顎連通域
對(duì)圖像作繼續(xù)做二值化處理,圖像呈現(xiàn)為角質(zhì)顎形態(tài)與背景分割的二值圖像,但仍可見(jiàn)圖像中分布有噪聲點(diǎn)(圖5)。
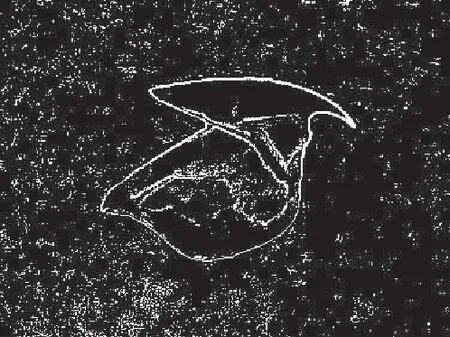
圖5 角質(zhì)顎二值圖像
因此在構(gòu)造角質(zhì)顎連通域的過(guò)程中,首先進(jìn)行自定義去噪能夠進(jìn)一步抑制二值圖像背景中的噪聲,分別設(shè)置m的值為5、10、20、50,得到不同程度去噪的角質(zhì)顎二值圖像(表1、圖6)。
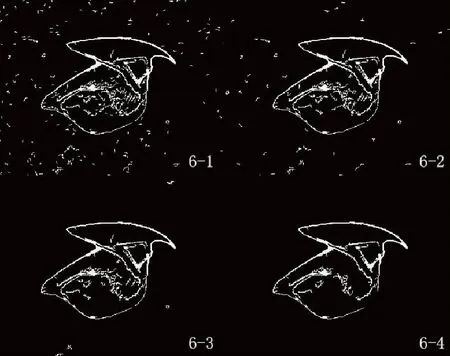
注:6-1(m=5),6-2(m=10),6-3(m=20),6-4(m=50)

表1 m值對(duì)噪聲處理程度的影響
本研究中m值選擇20,將像素點(diǎn)個(gè)數(shù)大于20的連通域作為噪聲刪除,使角質(zhì)顎的邊緣輪廓能夠精確地完成連通。進(jìn)而經(jīng)過(guò)1次迭代閉運(yùn)算,卷積核增至5×5,得到角質(zhì)顎連通域。
2.1.3 提取邊緣輪廓
將經(jīng)過(guò)雙邊濾波與高斯濾波去噪處理的灰度圖,分別進(jìn)一步處理構(gòu)造連通域,得到角質(zhì)顎連通域二值圖像后檢測(cè)出連通域圖像中的最長(zhǎng)輪廓并提取,得到角質(zhì)顎外輪廓圖像(圖7)。結(jié)果顯示,經(jīng)過(guò)雙邊濾波處理后提取得到的角質(zhì)顎輪廓能夠更好地保留其形態(tài)特異性,故最終選擇雙邊濾波做圖像的平滑去噪處理。再將本研究提取得到的輪廓圖與傳統(tǒng)的Canny算子提取得到的結(jié)果圖進(jìn)行對(duì)比(圖8)可知,本研究的邊緣檢測(cè)算法提取得到的輪廓更完整,保留的邊緣信息更簡(jiǎn)潔明確。
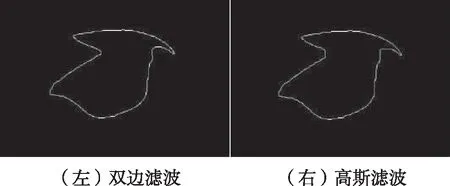
圖7 分別用雙邊濾波(左)和高斯濾波(右)處理后最終得到的角質(zhì)顎輪廓圖像對(duì)比
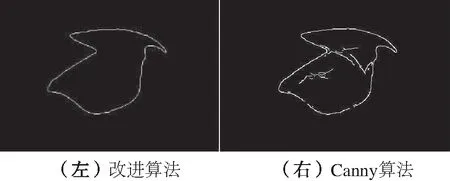
圖8 改進(jìn)算法(左)與Canny算法(右)對(duì)二維角質(zhì)顎彩色圖像邊緣檢測(cè)結(jié)果對(duì)比
2.2 模型檢驗(yàn)與分析
通過(guò)本研究方法與Canny算子隨機(jī)取30張角質(zhì)顎二維形態(tài)圖像進(jìn)行輪廓提取,計(jì)算識(shí)別的準(zhǔn)確率并分析。本研究分別計(jì)算像素準(zhǔn)確率(Pixel Accuracy)與平均像素準(zhǔn)確率(Mean Pixel Accuracy)對(duì)比兩種算法的識(shí)別準(zhǔn)確率計(jì)算結(jié)果,本研究方法的兩種準(zhǔn)確率均優(yōu)于傳統(tǒng)的Canny算子,本研究方法的 PA與MPA分別為97.79%與97.53%,而Canny算子的PA與MPA分別為95.03%與93.90%。由此可見(jiàn),本研究方法較Canny算子不僅圖像分割效果更佳,且提取到的輪廓更加完整精確。
3 討論
3.1 選取雙邊濾波的優(yōu)越性
高斯濾波為圖像處理中最常用的濾波器之一,是一種全局的濾波器,適用于消除高斯噪聲[26],在邊緣檢測(cè)研究中會(huì)較明顯地模糊邊緣,缺失對(duì)高頻信息的保護(hù)。與之相比,雙邊濾波器多計(jì)算了一個(gè)高斯方差,即基于空間分布的高斯濾波函數(shù)。它結(jié)合當(dāng)前被卷積像素的領(lǐng)域的空間鄰近度σd和像素值σr相似度計(jì)算被卷積像素的像素值, 在邊緣附近,距離較遠(yuǎn)的像素不會(huì)對(duì)邊緣上的像素值影響太大,保證了邊緣附近像素值的保存[27]。在相關(guān)研究中,劉瑞[28]選取了均值濾波、高斯濾波、中值濾波、雙邊濾波四種常用的濾波方法處理點(diǎn)云深度圖像,再對(duì)圖像邊緣提取的結(jié)果進(jìn)行定性分析,研究發(fā)現(xiàn)雙邊濾波在圖像去噪與邊緣保持上效果較好。
在局部放大圖中(圖4)兩種濾波的保邊效果對(duì)比明顯。其中,雙邊濾波能夠在平滑去噪的基礎(chǔ)上,基本保證了輪廓邊緣信息的準(zhǔn)確保存,有利于后續(xù)算法步驟的順利實(shí)現(xiàn),為提取得到標(biāo)準(zhǔn)的角質(zhì)顎外輪廓奠定了良好的基礎(chǔ)(圖7)。而對(duì)于相同的圖像,雖然高斯濾波處理后,肉眼仍可以清晰分辨出角質(zhì)顎輪廓,但對(duì)邊緣信息并未設(shè)置特殊保護(hù),全圖得到了相同程度的平滑。本研究中即使采用最小的卷積核進(jìn)行濾波平滑后,在構(gòu)造連通域的步驟中,由于輪廓缺損程度較大,為了能夠使邊緣輪廓閉合,共需要迭代進(jìn)行多達(dá)6次形態(tài)學(xué)閉運(yùn)算,卷積核增達(dá)13,使角質(zhì)顎邊緣輪廓產(chǎn)生較明顯形變,失去了角質(zhì)顎的形態(tài)特征,無(wú)法在此基礎(chǔ)上展開(kāi)進(jìn)一步研究。而雙邊濾波做預(yù)處理后,只需在構(gòu)造連通域進(jìn)行2次閉運(yùn)算處理。因此,在本研究中選取雙邊濾波做圖像預(yù)處理。
3.2 選取自適應(yīng)局部閾值二值化方法的優(yōu)越性
本研究選取自適應(yīng)局部閾值方法對(duì)灰度圖像做二值化處理,這種方法為圖像中每一個(gè)像素點(diǎn)根據(jù)其鄰域內(nèi)的亮度分布單獨(dú)計(jì)算閾值,實(shí)現(xiàn)了動(dòng)態(tài)自適應(yīng)調(diào)整屬于每個(gè)像素點(diǎn)的閾值,使二值化結(jié)果更加精確。在對(duì)圖像的二值化處理中,自適應(yīng)局部閾值方法較固定閾值方法有以下兩點(diǎn)優(yōu)勢(shì)[29]:
(1)固定閾值方法雖然對(duì)于以單張圖片為單位的二值化處理也有較理想的效果,但處理多張圖片時(shí),需要對(duì)每張圖片做大量不同閾值的對(duì)比以篩選找到適應(yīng)于該圖片的最佳閾值[30]。避免在批量處理時(shí),由于光線等拍攝因素導(dǎo)致各圖片的最佳閾值不同,從而引起輪廓提取失敗。
(2) 固定閾值方法為全局性閾值的二值化方法,相較于局部性閾值的方法準(zhǔn)確性較低。通過(guò)對(duì)比不難得出,自適應(yīng)局部閾值的二值化方法能夠高效準(zhǔn)確地實(shí)現(xiàn)圖像的批量處理,在本文研究的改進(jìn)的邊緣檢測(cè)算法中作為重要的一步,對(duì)于角質(zhì)顎等生物形態(tài)研究具有普適性。
傳統(tǒng)的圖像處理算法中大多使用固定閾值,如Canny算子。近年來(lái),在人們提出的各種改進(jìn)的算法中,自適應(yīng)閾值方法的優(yōu)勢(shì)也日漸凸顯。胡峰松等[31]研究的疲勞識(shí)別方法中采用自適應(yīng)閾值對(duì)人眼圖像做二值化處理,通過(guò)計(jì)算二值圖中黑色像素累積差值,識(shí)別閉眼狀態(tài),識(shí)別準(zhǔn)確率高達(dá)96.78%。
3.3 改進(jìn)的邊緣檢測(cè)算法的優(yōu)越性
目前,各類改進(jìn)的邊緣檢測(cè)算法推動(dòng)著形態(tài)學(xué)研究的進(jìn)展,如鄭如新等[32]對(duì)Canny算法進(jìn)行改進(jìn),優(yōu)化了邊緣檢測(cè)效果,并應(yīng)用于金銀花的自動(dòng)采摘,識(shí)別率為79.17%,提高了金銀花采摘效率;范凌云等[33]提出一種鴨蛋外殼檢測(cè)系統(tǒng),基于機(jī)器視覺(jué)采集鴨蛋圖像,并進(jìn)行灰度化、二值化、邊緣檢測(cè)處理,實(shí)現(xiàn)裂紋鴨蛋等破損鴨蛋的精確檢測(cè),能夠有效代替?zhèn)鹘y(tǒng)的人工檢測(cè)。
分別采用本研究中的算法與Canny算法提取角質(zhì)顎邊緣輪廓(圖8)。通過(guò)本研究中的邊緣檢測(cè)算法能夠提取得到標(biāo)準(zhǔn)的角質(zhì)顎外輪廓。同時(shí)不難發(fā)現(xiàn),利用Canny算法提取得到的頭足類角質(zhì)顎輪廓圖中存在許多冗余輪廓信息。在調(diào)整了合適的閾值,消除了由于拍攝條件的限制而產(chǎn)生的背景噪聲后,仍然無(wú)法完全避免角質(zhì)顎的紋理經(jīng)圖像處理后產(chǎn)生的冗余輪廓。同時(shí),角質(zhì)顎外輪廓存在缺損。這將對(duì)后續(xù)利用計(jì)算機(jī)視覺(jué)提取特征點(diǎn)產(chǎn)生潛在影響,進(jìn)而極大限制了利用計(jì)算機(jī)視覺(jué)在生物形態(tài)中的研究。
4 結(jié)論
本研究提出了一種改進(jìn)的邊緣檢測(cè)方法,通過(guò)圖像灰度化、濾波去噪、圖像二值化、構(gòu)造目標(biāo)連通域、提取邊緣輪廓5個(gè)步驟,提取研究對(duì)象的形態(tài)外輪廓。將改進(jìn)的算法在頭足類角質(zhì)顎的模式識(shí)別中進(jìn)行研究分析,并與Canny算子的處理效果進(jìn)行對(duì)比。本研究的方法效果良好,能夠有效區(qū)分信噪,提高了目標(biāo)選擇的準(zhǔn)確性,同時(shí)又能夠在誤差允許的范圍內(nèi)保證輪廓的完整性。應(yīng)用在頭足類角質(zhì)顎的識(shí)別中,能夠提取得到標(biāo)準(zhǔn)的角質(zhì)顎邊緣輪廓,對(duì)以角質(zhì)顎為例的生物形態(tài)研究具有普適性。與 Canny算子的檢測(cè)結(jié)果相比,本研究中的檢測(cè)結(jié)果直觀、完整、精確度更高,為解決傳統(tǒng)的人工測(cè)量角質(zhì)顎形態(tài)特征參數(shù)存在的檢測(cè)精度差、檢測(cè)效率低等弊端提供新思路。隨著計(jì)算機(jī)視覺(jué)技術(shù)與形態(tài)測(cè)量學(xué)的發(fā)展,利用相關(guān)算法提取生物邊緣輪廓、從數(shù)量和形狀上來(lái)總結(jié)形態(tài)數(shù)據(jù)、將生物形態(tài)差異定量描述并可視化,具有傳統(tǒng)形態(tài)學(xué)方法所無(wú)法達(dá)到的分析效果,促進(jìn)了生物形態(tài)學(xué)研究的智能化發(fā)展。
□
猜你喜歡
體育科技文獻(xiàn)通報(bào)(2022年3期)2022-05-23 13:46:54
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
天津外國(guó)語(yǔ)大學(xué)學(xué)報(bào)(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機(jī)設(shè)計(jì)與研究(2019年4期)2019-05-21 07:21:24
