遞歸最小二乘循環(huán)神經(jīng)網(wǎng)絡(luò)
2022-08-30 13:51:24張春元歐宜貴
自動化學(xué)報 2022年8期
關(guān)鍵詞:優(yōu)化
趙 杰 張春元 劉 超 周 輝 歐宜貴 宋 淇
循環(huán)神經(jīng)網(wǎng)絡(luò)(Recurrent neural networks,RNNs)作為一種有效的深度學(xué)習(xí)模型,引入了數(shù)據(jù)在時序上的短期記憶依賴.近年來,RNNs 在語言模型[1]、機(jī)器翻譯[2]、語音識別[3]等序列任務(wù)中均有不俗的表現(xiàn).但是相比前饋神經(jīng)網(wǎng)絡(luò)而言,也正因為其短期記憶依賴,RNNs 的參數(shù)訓(xùn)練更為困難[4-5].如何高效訓(xùn)練RNNs,即RNNs 的優(yōu)化,是RNNs能否得以有效利用的關(guān)鍵問題之一.目前主流的RNNs 優(yōu)化算法主要有一階梯度下降算法、自適應(yīng)學(xué)習(xí)率算法和二階梯度下降算法等幾種類型.
最典型的一階梯度下降算法是隨機(jī)梯度下降(Stochastic gradient descent,SGD)[6],廣泛應(yīng)用于優(yōu)化RNNs.SGD 基于小批量數(shù)據(jù)的平均梯度對參數(shù)進(jìn)行優(yōu)化.因為SGD 的梯度下降大小和方向完全依賴當(dāng)前批次數(shù)據(jù),容易陷入局部極小點,故而學(xué)習(xí)效率較低,更新不穩(wěn)定.為此,研究者在SGD的基礎(chǔ)上引入了速度的概念來加速學(xué)習(xí)過程,這種算法稱為基于動量的SGD 算法[7],簡稱為Momentum.在此基礎(chǔ)上,Sutskever 等[8]提出了一種Nesterov 動量算法.與Momentum 的區(qū)別體現(xiàn)在梯度計算上.一階梯度下降算法的超參數(shù)通常是預(yù)先固定設(shè)置的,一個不好的設(shè)置可能會導(dǎo)致模型訓(xùn)練速度低下,甚至完全無法訓(xùn)練.針對SGD 的問題,研究者提出了一系列學(xué)習(xí)率可自適應(yīng)調(diào)整的一階梯度下降算法,簡稱自適應(yīng)學(xué)習(xí)率算法.Duchi 等[9]提出的AdaGrad 算法采用累加平方梯度對學(xué)習(xí)率進(jìn)行動態(tài)調(diào)整,在凸優(yōu)化問題中表現(xiàn)較好,但在深度神經(jīng)網(wǎng)絡(luò)中會導(dǎo)致學(xué)習(xí)率減小過快.Tieleman 等[10]提出的RMSProp 算法與Zeiler[11]提出的AdaDelta算法在思路上類似,都是使用指數(shù)衰減平均來減少太久遠(yuǎn)梯度的影響,解決了AdaGrad學(xué)習(xí)率減少過快的問題.Kingma 等[12]提出的Adam 算法則將RMSProp 與動量思想相結(jié)合,綜合考慮梯度的一階矩和二階矩估計計算學(xué)習(xí)率,在大部分實驗中比AdaDelta 等算法表現(xiàn)更為優(yōu)異,然而Keskar 等[13]發(fā)現(xiàn)Adam 最終收斂效果比SGD 差,Reddi 等[14]也指出Adam 在某些情況下不收斂.
基于二階梯度下降的算法采用目標(biāo)函數(shù)的二階梯度信息對參數(shù)優(yōu)化.最廣泛使用的是牛頓法,其基于二階泰勒級數(shù)展開來最小化目標(biāo)函數(shù),收斂速度比一階梯度算法快很多,但是每次迭代都需要計算Hessian 矩陣以及該矩陣的逆,計算復(fù)雜度非常高.近年來研究人員提出了一些近似算法以降低計算成本.Hessian-Free 算法[15]通過直接計算Hessian 矩陣和向量的乘積來降低其計算復(fù)雜度,但是該算法每次更新參數(shù)需要進(jìn)行上百次線性共軛梯度迭代.AdaQN[16]在每個迭代周期中要求一個兩層循環(huán)遞歸,因此計算量依然較大.K-FAC 算法(Kronecker-factored approximate curvature)[17]通過在線構(gòu)造Fisher 信息矩陣的可逆近似來計算二階梯度.此外,還有BFGS 算法[18]以及其衍生算法(例如L-BFGS 算法[19-20]等),它們都通過避免計算Hessian 矩陣的逆來降低計算復(fù)雜度.相對于一階優(yōu)化算法來說,二階優(yōu)化算法計算量依然過大,因此不適合處理規(guī)模過大的數(shù)據(jù)集,并且所求得的高精度解對模型的泛化能力提升有限,甚至有時會影響泛化,因此二階梯度優(yōu)化算法目前還難以廣泛用于訓(xùn)練RNNs.
除了上面介紹的幾種類型優(yōu)化算法之外,也有不少研究者嘗試將遞歸最小二乘算法(Recursive least squares,RLS)應(yīng)用于訓(xùn)練各種神經(jīng)網(wǎng)絡(luò).RLS 是一種自適應(yīng)濾波算法,具有非常快的收斂速度.Azimi-Sadjadi 等[21]提出了一種RLS 算法,對多層感知機(jī)進(jìn)行訓(xùn)練.譚永紅[22]將神經(jīng)網(wǎng)絡(luò)層分為線性輸入層與非線性激活層,對非線性激活層的反傳誤差進(jìn)行近似,并使用RLS 算法對線性輸入層的參數(shù)矩陣進(jìn)行求解來加快模型收斂.Xu 等[23]成功將RLS 算法應(yīng)用于多層RNNs.上述算法需要為每個神經(jīng)元存儲一個協(xié)方差矩陣,時空開銷很大.Peter等[24]提出了一種擴(kuò)展卡爾曼濾波優(yōu)化算法,對RNNs 進(jìn)行訓(xùn)練.該算法將RNNs 表示為被噪聲破壞的平穩(wěn)過程,然后對網(wǎng)絡(luò)的狀態(tài)矩陣進(jìn)行求解.該算法不足之處是需要計算雅可比矩陣來達(dá)到線性化的目的,時空開銷也很大.Jaeger[25]通過將非線性系統(tǒng)近似為線性系統(tǒng),實現(xiàn)了回聲狀態(tài)網(wǎng)絡(luò)參數(shù)的RLS 求解,但該算法僅限于求解回聲狀態(tài)網(wǎng)絡(luò)的輸出層參數(shù),并不適用于一般的RNNs 訓(xùn)練優(yōu)化.
針對以上問題,本文提出了一種新的基于RLS優(yōu)化的RNN 算法(簡稱RLS-RNN).本文主要貢獻(xiàn)如下:1)在RLS-RNN 的輸出層參數(shù)更新推導(dǎo)中,借鑒SGD 中平均梯度的計算思想,提出了一種適于迷你批樣本訓(xùn)練的RLS 更新方法,顯著減少了RNNs 的實際訓(xùn)練時間,使得所提算法可處理較大規(guī)模數(shù)據(jù)集.2)在RLS-RNN 的隱藏層參數(shù)更新推導(dǎo)中,提出了一種等效梯度思想,以獲得該層參數(shù)的最小二乘解,同時使得RNNs 僅要求輸出層激活函數(shù)存在反函數(shù)即可采用RLS 進(jìn)行訓(xùn)練,對隱藏層的激活函數(shù)則無此要求.3)相較以前的RLS優(yōu)化算法,RLS-RNN 只需在隱藏層和輸出層而非為這兩層的每一個神經(jīng)元分別設(shè)置一個協(xié)方差矩陣,使得其時間和空間復(fù)雜度僅約SGD 算法的3 倍.4)對RLS-RNN 的遺忘因子自適應(yīng)和過擬合預(yù)防問題進(jìn)行了簡要討論,分別給出了一種解決辦法.
1 背景
1.1 基于SGD 優(yōu)化的RNN 算法
RNNs 處理時序數(shù)據(jù)的模型結(jié)構(gòu)如圖1 所示.一個基本的RNN 通常由一個輸入層、一個隱藏層(也稱為循環(huán)層)和一個輸出層組成.在圖1 中,Xs,t∈Rm×a,Hs,t∈Rm×h和Os,t∈Rm×d分別為第s批訓(xùn)練樣本數(shù)據(jù)在第t時刻的輸入值、隱藏層和輸出層的輸出值,其中,m為迷你批大小,a為一個訓(xùn)練樣本數(shù)據(jù)的維度,h為隱藏層神經(jīng)元數(shù),d為輸出層神經(jīng)元數(shù);Us-1∈Ra×h,Ws-1∈Rh×h和Vs-1∈Rh×d分別為第s批數(shù)據(jù)訓(xùn)練時輸入層到隱藏層、隱藏層內(nèi)部、隱藏層到輸出層的參數(shù)矩陣;∈R1×h和∈R1×d分別為隱藏層和輸出層的偏置參數(shù)矩陣;τ表示當(dāng)前序列數(shù)據(jù)共有τ時間步.RNNs 的核心思想是在模型的不同時間步對參數(shù)進(jìn)行共享,將每一時間步的隱藏層輸出值加權(quán)輸入到其下一時間步的計算中,從而令權(quán)重參數(shù)學(xué)習(xí)到序列數(shù)據(jù)不同時間步之間的關(guān)聯(lián)特征并進(jìn)行泛化.輸出層則根據(jù)實際問題選擇將哪些時間步輸出,比較常見的有序列數(shù)據(jù)的分類問題和預(yù)測問題.對序列數(shù)據(jù)預(yù)測問題,輸出層每一時間步均有輸出;對序列數(shù)據(jù)分類問題,輸出層沒有圖1 虛線框中的時間步輸出,即僅在最后一個時間步才有輸出.

圖1 RNN 模型結(jié)構(gòu)Fig.1 RNN model structure
RNNs 通過前向傳播來獲得實際輸出,其計算過程可描述為

其中,1 為m行全1 列向量;φ(·) 和σ(·)分別為隱藏層和輸出層的激活函數(shù),常用的激活函數(shù)有sigmoid 函數(shù)與tanh 函數(shù)等.為了便于后續(xù)推導(dǎo)和表達(dá)的簡潔性,以上兩式可用增廣矩陣進(jìn)一步表示為

RNNs 的參數(shù)更新方式和所采用的優(yōu)化算法密切相關(guān),基于SGD 算法的RNNs 模型優(yōu)化通常借助于最小化目標(biāo)函數(shù)反向傳播完成.常用目標(biāo)函數(shù)有交叉熵函數(shù)、均方誤差函數(shù)、Logistic 函數(shù)等.這里僅考慮均方誤差目標(biāo)函數(shù)


式中,?為Hadamard 積,為輸出層非激活線性輸出,即

則該層參數(shù)更新規(guī)則可定義為

其中,α為學(xué)習(xí)率.


則該層參數(shù)更新規(guī)則可定義為

1.2 RLS 算法
RLS 是一種最小二乘優(yōu)化算法的遞推化算法,不但收斂速度很快,而且適用于在線學(xué)習(xí).設(shè)當(dāng)前訓(xùn)練樣本輸入集Xt={x1,···,xt},對應(yīng)的期望輸出集為.其目標(biāo)函數(shù)通常定義為

其中,w為權(quán)重向量;λ∈(0, 1] 為遺忘因子.
令?wJ(w)=0,可得

整理后可表示為

其中,

為了避免昂貴的矩陣求逆運算且適用于在線學(xué)習(xí),令

將式(21)和式(22)改寫為如下遞推更新形式

由Sherman-Morrison-Woodbury 公式[27]易得

其中,

其中,gt為增益向量.進(jìn)一步將式(23)、(25)和(26)代入式(20),可得當(dāng)前權(quán)重向量的更新公式為

其中,

2 基于RLS 優(yōu)化的RNNs 算法
RLS 算法雖然具有很快的學(xué)習(xí)速度,然而只適用于線性系統(tǒng).我們注意到在RNNs 中,如果不考慮激活函數(shù),其隱藏層和輸出層的輸出計算依舊是線性的,本節(jié)將基于這一特性來構(gòu)建新的迷你批RLS 優(yōu)化算法.假定輸出層激活函數(shù)σ(·)存在反函數(shù)σ-1(·),并仿照RLS 算法將輸出層目標(biāo)函數(shù)定義為

其中,s代表共有s批訓(xùn)練樣本;為輸出層的非激活線性期望值,即

因此,RNNs 參數(shù)優(yōu)化問題可以定義為

由于RNNs 前向傳播并不涉及權(quán)重參數(shù)更新,因此本文所提算法應(yīng)用于RNNs 訓(xùn)練時,其前向傳播計算與第1.1 節(jié)介紹的SGD-RNN 算法基本相同,Hs,t同樣采用式(3)計算,唯一區(qū)別是此處并不需要計算Os,t,而是采用式(12)計算.本節(jié)將只考慮RLS-RNN 的輸出層和隱藏層參數(shù)更新推導(dǎo).
2.1 RLS-RNN 輸出層參數(shù)更新推導(dǎo)

將式(35)代入式(36),得

類似于RLS 算法推導(dǎo),以上兩式可進(jìn)一步寫成如下遞推形式

2.2 RLS-RNN 隱藏層參數(shù)更新推導(dǎo)




其中,η為比例因子.理論上講,不同迷你批數(shù)據(jù)對應(yīng)的η應(yīng)該有一定的差別.但考慮到各批迷你批數(shù)據(jù)均是從整個訓(xùn)練集中隨機(jī)選取,因此可忽略這一差別.根據(jù)式(16)可知,且將式(59)代入式(55),得

其中,

式(61)的遞歸最小二乘解推導(dǎo)過程類似于輸出層參數(shù)更新推導(dǎo).令,同樣采用上文的近似平均求解方法,易得

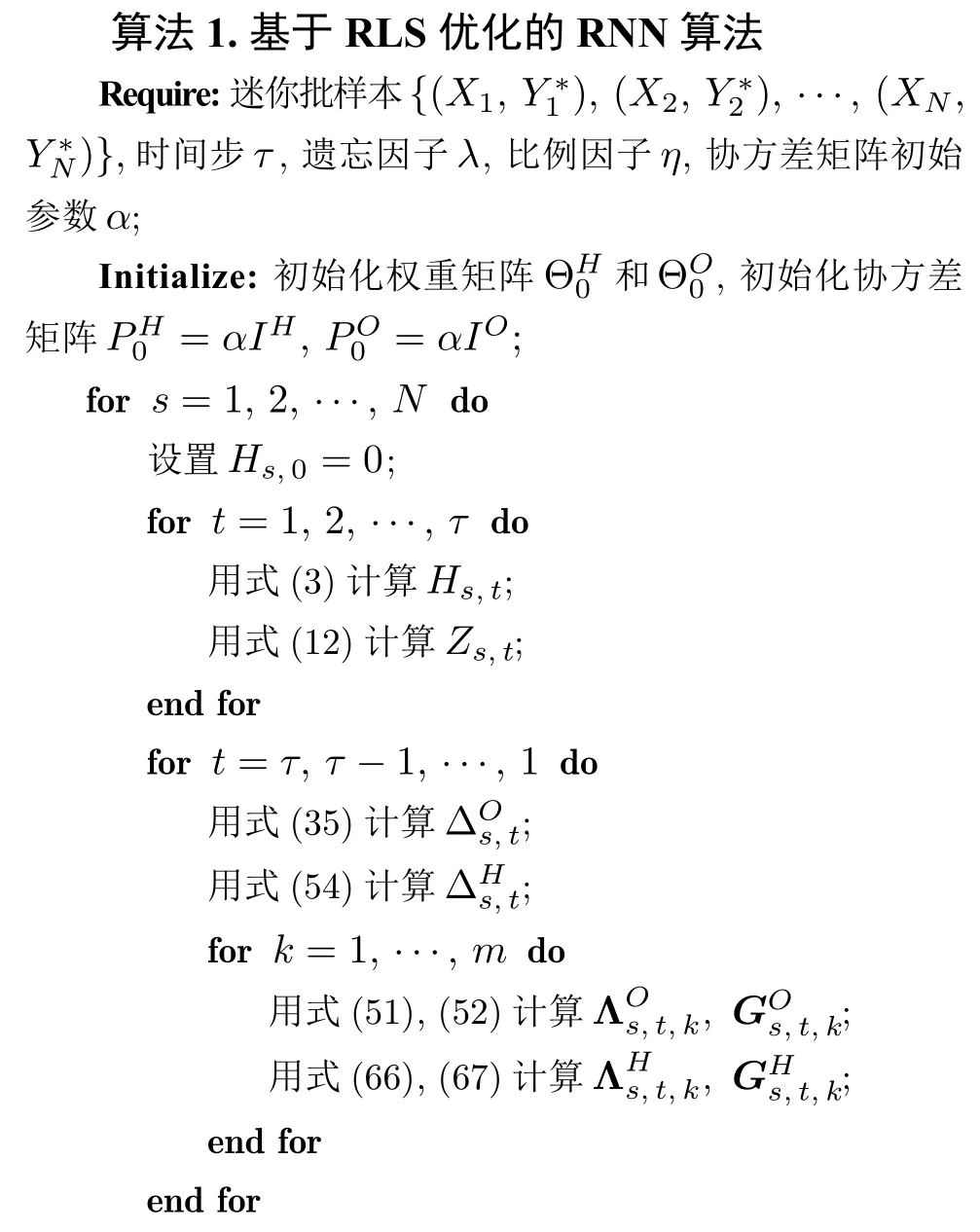
綜上,RLS-RNN 算法如算法 1 所示.

3 分析與改進(jìn)
3.1 復(fù)雜度分析
在RNNs 當(dāng)前所用優(yōu)化算法中,SGD 是時間和空間復(fù)雜度最低的算法.本節(jié)將以SGD-RNN 為參照,來對比分析本文提出的RLS-RNN算法的時間和空間復(fù)雜度.兩個算法采用一個迷你批樣本數(shù)據(jù)集學(xué)習(xí)的時間和空間復(fù)雜度對比結(jié)果如表1 所示.從第1 節(jié)介紹可知,τ表示序列數(shù)據(jù)時間步長度,m表示批大小,a表示單個樣本向量的維度,h表示隱藏層神經(jīng)元數(shù)量,d表示輸出層神經(jīng)元數(shù)量.在實際應(yīng)用中,a和d一般要小于h,因而RLS-RNN的時間復(fù)雜度和空間復(fù)雜度大約為SGD-RNN 的3 倍.在實際運行中,我們發(fā)現(xiàn)RLS-RNN 所用時間和內(nèi)存空間大約是SGD-RNN 的3 倍,與本節(jié)理論分析結(jié)果正好相吻合.

表1 SGD-RNN 與RLS-RNN 復(fù)雜度分析Table 1 Complexity analysis of SGD-RNN and RLS-RNN
所提算法只需在RNNs 的隱藏層和輸出層各設(shè)置一個矩陣,而以前的RLS 優(yōu)化算法則需為RNNs 隱藏層和輸出層的每一個神經(jīng)元設(shè)置一個與所提算法相同規(guī)模的協(xié)方差矩陣,因而所提算法在時間和空間復(fù)雜度上有著大幅降低.此外,所提算法采用了深度學(xué)習(xí)廣為使用的迷你批訓(xùn)練方式,使得其可用于處理較大規(guī)模的數(shù)據(jù)集.
3.2 λ 自適應(yīng)調(diào)整
眾多研究表明,遺忘因子λ的取值對RLS 算法性能影響較大[28],特別是在RLS 處理時變?nèi)蝿?wù)時影響更大.由于本文所提算法建立在傳統(tǒng)RLS 基礎(chǔ)之上,因而RLS-RNN 的收斂質(zhì)量也易受λ的取值影響.在RLS 研究領(lǐng)域,當(dāng)前已有不少關(guān)于λ自適應(yīng)調(diào)整方面的成果[28-29],因此可以直接利用這些成果對RLS-RNN 作進(jìn)一步改進(jìn).
在文獻(xiàn)[29]基礎(chǔ)上,本小節(jié)直接給出一種λ自適應(yīng)調(diào)整方法.對第s迷你批樣本,RLS-RNN 各層中的遺忘因子統(tǒng)一定義為

其中,λmax接近于1,κ>1 用于控制λs更新,一般建議取2,通常κ取值越小,λs更新越頻繁;ξ是一個極小的常數(shù),防止在計算λs時分母為0;qs,和定義為

其中,μ0建議取 7/8;μ1=1-1/(?1m),通常?1≥2;μ2=1-1/(?2m),且?2>?1.
當(dāng)然,采用以上方式更新λs將會引入新的超參數(shù),給RLS-RNN 的調(diào)試帶來一定困難.從使用RLS-RNN 的實際經(jīng)驗來看,也可采用固定的λ進(jìn)行訓(xùn)練,建議將λ取值設(shè)置在0.99 至1 之間.
3.3 過擬合預(yù)防
傳統(tǒng)RLS 算法雖然具有很快的收斂速度,但也經(jīng)常面臨過擬合風(fēng)險,RLS-RNN 同樣面臨這一風(fēng)險.類似于第3.2 節(jié),同樣可以利用RLS 領(lǐng)域關(guān)于這一問題的一些研究成果來改進(jìn)RLS-RNN.
Ek?io?lu[30]提出了一種L1正則化RLS 方法,即在參數(shù)更新時附加一個正則化項.對其稍加改進(jìn),則在式(50)和式(65)的基礎(chǔ)上可分別重新定義為
實際上,除了這種方法外,讀者也可采用其他正則化方法對RLS-RNN 作進(jìn)一步改進(jìn).
4 仿真實驗
為了驗證所提算法的有效性,本節(jié)選用兩個序列數(shù)據(jù)分類問題和兩個序列數(shù)據(jù)預(yù)測問題進(jìn)行仿真實驗.其中,兩個分類問題為MNIST 手寫數(shù)字識別分類[31]和IMDB 影評正負(fù)情感分類,兩個預(yù)測問題為Google 股票價格預(yù)測[32]與北京市PM2.5 污染預(yù)測[33].在實驗中,將著重驗證所提算法的收斂性能、超參數(shù)α和η選取的魯棒性.在收斂性能驗證中,選用主流一階梯度優(yōu)化算法SGD、Momentum和Adam 進(jìn)行對比,所有問題的實驗均迭代運行150 Epochs;在超參數(shù)魯棒性驗證中,考慮到所提算法收斂速度非常快,所有問題的實驗均只迭代運行50 Epochs.為了減少實驗結(jié)果的隨機(jī)性,所有實驗均重復(fù)運行5 次然后取平均值展示結(jié)果.此外,為了觀察所提算法的實際效果,所有優(yōu)化算法在RNNs 參數(shù)更新過程均不進(jìn)行Dropout 處理.需要特別說明的是:對前兩個分類問題,由于時變性不強(qiáng),所提算法遺忘因子采用固定值方式而不采用第3.2節(jié)所提方式;對后兩個預(yù)測問題,所提算法遺忘因子將采用第3.2 節(jié)所提方式;所提算法對4 個問題均將采用第3.3 節(jié)所提方法防止過擬合.
4.1 MNIST 手寫數(shù)字識別分類
MNIST 分類問題的訓(xùn)練集與測試集分別由55 000和10 000 幅 28×28 像素、共10 類灰度手寫數(shù)字圖片組成,學(xué)習(xí)目標(biāo)是能對給定手寫數(shù)字圖片進(jìn)行識別.為了適應(yīng)RNNs 學(xué)習(xí),將訓(xùn)練集和測試集中的每張圖片轉(zhuǎn)換成一個28 時間步的序列,每時間步包括28 個像素輸入,圖片類別采用One-hot 編碼.
該問題所用RNN 模型結(jié)構(gòu)設(shè)置如下:1)輸入層輸入時間步為28,輸入向量維度為28.2)隱藏層時間步為28,神經(jīng)元數(shù)為100,激活函數(shù)為tanh(·).3)輸出層時間步為1,神經(jīng)元數(shù)為10,激活函數(shù)為tanh(·).由于 tanh-1(1)和 tanh-1(-1)分別為正、負(fù)無窮大,在具體實現(xiàn)中,對 tanh-1(x),我們約定:若x≥0.997,則 tanh-1(x)=tanh-1(0.997);若x≤-0.997,則 tanh-1(x)=tanh-1(-0.997).RNN 模型權(quán)重參數(shù)采用He 初始化[34].
在收斂性能對比驗證中,各優(yōu)化算法超參數(shù)設(shè)置如下:RLS 遺忘因子λ為0.9999,比例因子η為1,協(xié)方差矩陣初始化參數(shù)α為0.4,正則化因子γ為0.0001;SGD 學(xué)習(xí)率為0.05;Momentum 學(xué)習(xí)率為0.05,動量參數(shù)0.5;Adam 學(xué)習(xí)率0.001,β1設(shè)為0.9,β2為0.999,?設(shè)為 10-8.在超參數(shù)α和η選取的魯棒性驗證中,采用控制變量法進(jìn)行測試:1)固定λ=0.9999,γ=0.0001 和η=1,依次選取α=0.01,0.1,0.2,···,1 驗證;2)固定λ=0.9999,γ=0.0001和α=0.4,依次選取η=0.1,1,2,···,10 驗證.
在上述設(shè)定下,每一Epoch 均將訓(xùn)練集隨機(jī)劃分成550 個迷你批,批大小為100.每訓(xùn)練完一個Epoch,便從測試集中隨機(jī)生成50 個迷你批進(jìn)行測試,統(tǒng)計其平均分類準(zhǔn)確率.實驗結(jié)果如圖2(a)、表2 和表3 所示.由圖2(a)可知,RLS 在第1 個Epoch 便可將分類準(zhǔn)確率提高到95%以上,其收斂速度遠(yuǎn)高于其他三種優(yōu)化算法,且RLS 的準(zhǔn)確率曲線比較平滑,說明參數(shù)收斂比較穩(wěn)定.表2 和表3記錄了該實驗取不同的α和η時第50 Epoch 的平均分類準(zhǔn)確率.從表2 中不難看出,不同初始化因子α在第50 Epoch 的準(zhǔn)確率都在97.10%到97.70%之間波動,整體來說比較穩(wěn)定,說明α對算法性能影響較小.從表3 中可知,不同η取值的準(zhǔn)確率均在97.04%到97.80%之間,波動較小,η取值對算法性能的影響也不大.綜上,RLS 算法的α和η取值均具有較好的魯棒性.

圖2 收斂性比較實驗結(jié)果Fig.2 Experimental results on the convergence comparisons

表2 初始化因子 α 魯棒性分析Table 2 Robustness analysis of the initializing factor α

表3 比例因子 η 魯棒性分析Table 3 Robustness analysis of the scaling factor η
4.2 IMDB 影評情感分類
IMDB 分類問題的訓(xùn)練集和測試集分別由25 000和10 000 條電影評論組成,正負(fù)情感評論各占50%,學(xué)習(xí)目標(biāo)是能對給定評論的感情傾向進(jìn)行識別.為了適應(yīng)RNNs 學(xué)習(xí),首先從Keras 內(nèi)置數(shù)據(jù)集加載訓(xùn)練集和測試集的各條評論,選取每條評論前32個有效詞構(gòu)成一個時間步序列,然后對該評論中的每個有效詞以GloVe.6B 預(yù)訓(xùn)練模型[35]進(jìn)行詞嵌入,使得每個時間步包括50 個輸入維度,評論的正負(fù)情感類別采用One-hot 編碼.
該問題所用RNN 模型結(jié)構(gòu)設(shè)置如下:1)輸入層輸入時間步為32,輸入向量維度為50.2)隱藏層時間步為32,神經(jīng)元數(shù)為100,激活函數(shù)為 tanh(·).3)輸出層時間步為1,神經(jīng)元數(shù)為2,激活函數(shù)為tanh(·).tanh-1(x)問題和RNN 模型權(quán)重參數(shù)的初始化按第4.1 節(jié)方式同樣處理.
在收斂性能對比驗證中,各優(yōu)化算法超參數(shù)設(shè)置如下:RLS 遺忘因子λ為0.9999,比例因子η為1,協(xié)方差矩陣初始化參數(shù)α為0.4,正則化因子γ為0.001;SGD 學(xué)習(xí)率為0.05;Momentum 學(xué)習(xí)率為0.05,動量參數(shù)0.5;Adam 學(xué)習(xí)率0.0001,β1設(shè)為0.9,β2設(shè)為0.999,?設(shè)為 10-8.在超參數(shù)α和η選取的魯棒性驗證中,同樣采用控制變量法進(jìn)行測試:1)固定λ=0.9999,γ=0.001 和η=1,依次選取α=0.01,0.1,0.2,···,1 驗證;2)固定λ=0.9999,γ=0.001 和α=0.4,依次選取η=0.1,1,2,···,10驗證.
在上述設(shè)定下,每一Epoch 均將訓(xùn)練集隨機(jī)劃分成250 個迷你批,批大小為100.每訓(xùn)練完一個Epoch,便從測試集中隨機(jī)生成50 個迷你批進(jìn)行測試,統(tǒng)計其平均分類準(zhǔn)確率.實驗結(jié)果如圖2(b)、表2 和表3 所示.由圖2(b)可知,SGD 與Momentum 的收斂不太穩(wěn)定,波動比較大,而Adam的準(zhǔn)確率曲線則比較平滑,這三者在訓(xùn)練初期的準(zhǔn)確率都比較低.相比之下,RLS 在訓(xùn)練初期的準(zhǔn)確率已經(jīng)比較接近后期預(yù)測準(zhǔn)確率,前期收斂速度極快,整體準(zhǔn)確率也明顯優(yōu)于其余三種優(yōu)化算法.表2和表3 記錄了IMDB 實驗取不同的α和η時第50 Epoch 的平均分類準(zhǔn)確率.由表2 易知不同α的情況下準(zhǔn)確率浮動范圍比較小,因此不同α對算法的影響比較小.由表3 可知,采用不同η時其準(zhǔn)確率在72.86%到73.82%之間浮動,可見η的取值對算法性能影響較小.綜上,RLS 算法的α和η取值在本實驗中同樣都具有較好的魯棒性.
4.3 Google 股票價格預(yù)測
Google 股票價格預(yù)測問題的數(shù)據(jù)源自Google公司從2010 年1 月4 日到2016 年12 月30 日的股價記錄,每日股價記錄包括當(dāng)日開盤價、當(dāng)日最低價、當(dāng)日最高價、交易筆數(shù)及當(dāng)日調(diào)整后收盤價五種數(shù)值,學(xué)習(xí)目標(biāo)是能根據(jù)當(dāng)日股價預(yù)測調(diào)整后次日收盤價.為了適應(yīng)RNNs 學(xué)習(xí),首先對這些數(shù)值進(jìn)行歸一化處理,然后以連續(xù)50 個交易日為單位進(jìn)行采樣,每次采樣生成一條5 維輸入序列數(shù)據(jù),同時將該次采樣后推一個交易日選取各日調(diào)整后收盤價生成對應(yīng)的一維期望輸出序列數(shù)據(jù),取前1 400條序列數(shù)據(jù)的訓(xùn)練集,后續(xù)200 條序列數(shù)據(jù)為測試集,并將訓(xùn)練集和測試集的樣本分別隨機(jī)置亂.
該問題所用RNN 模型結(jié)構(gòu)設(shè)置如下:1)輸入層輸入時間步為50,輸入向量維度為5.2)隱藏層時間步為50,神經(jīng)元數(shù)為50,激活函數(shù)為 tanh(·).3)輸出層時間步為50,神經(jīng)元數(shù)為1,激活函數(shù)為identity(·).RNN 模型權(quán)重參數(shù)采用高斯分布隨機(jī)初始化.
在收斂性能對比驗證中,各優(yōu)化算法超參數(shù)設(shè)置如下:RLS 遺忘因子采用第3.2 節(jié)自適應(yīng)方式,其參數(shù)κ=1.5,λmax=0.9999,q0=10,μ0=7/8,?1=6,?2=18,ξ=10-15,魯棒性實驗中自適應(yīng)參數(shù)與此相同,RLS 的比例因子η為1,協(xié)方差矩陣初始化參數(shù)α為0.3,正則化因子γ為0.000001;SGD 學(xué)習(xí)率為0.05;Momentum 學(xué)習(xí)率為0.05,動量參數(shù)0.8;Adam 學(xué)習(xí)率0.001,β1設(shè)為0.9,β2設(shè)為0.999,?設(shè)為 10-8.在超參數(shù)α和η選取的魯棒性驗證中,采用控制變量法進(jìn)行測試:1)固定γ=0.000001 和η=1,依次選取α=0.01,0.1,0.2,···,1驗證;2)固定γ=0.000001 和α=0.3,依次選取η=0.1,1,2,···,10驗證.
在上述設(shè)定下,每一Epoch 均將訓(xùn)練集隨機(jī)劃分成28 個迷你批,批大小為50.每訓(xùn)練完一個Epoch,便從測試集中隨機(jī)生成50 個迷你批進(jìn)行測試,統(tǒng)計其均方誤差(mean square error,MSE).實驗結(jié)果如圖2(c)、表2 和表3 所示.由圖2(c)可知,Adam 在前期誤差較大,但是很快降低到SGD 與Momentum 的誤差之下,Momentum 則比SGD 稍強(qiáng)一些,RLS 則在迭代初期就幾乎收斂.表2 和表3記錄了該實驗取不同的α和η時在第50 Epoch 的平均MSE.由表2 可知,在不同α取值下,實驗結(jié)果都比較接近,波動較小,這說明α的取值對于RLS 算法性能的影響較小.由表3 可知,當(dāng)η取不同值時,MSE 值變化不大,因此η對算法影響較小.綜上,RLS 算法的α和η取值在本實驗中也具有較好的魯棒性.
4.4 北京市PM2.5 污染預(yù)測
北京市PM2.5 污染預(yù)測問題的數(shù)據(jù)源自2010年1 月1 日至2014 年12 月31 日每小時的監(jiān)測記錄.每條記錄由PM2.5 濃度、露點、攝氏溫度、氣壓、組合風(fēng)向、累計風(fēng)速、降雪量、降水量共8 個屬性值組成,學(xué)習(xí)目標(biāo)是能根據(jù)當(dāng)前小時的監(jiān)測記錄預(yù)測兩個小時后的PM2.5 濃度值.為了適應(yīng)RNNs 學(xué)習(xí),首先對風(fēng)向數(shù)據(jù)按序編碼,然后對屬性數(shù)值歸一化,接著以連續(xù)24 小時為單位進(jìn)行采樣,每次采樣生成一條8 維輸入序列數(shù)據(jù),同時將該次采樣后推兩個小時選取各小時的PM2.5 濃度值生成一條對應(yīng)的一維期望輸出序列數(shù)據(jù),并取前35 000 條序列數(shù)據(jù)為訓(xùn)練集,后續(xù)8 700 條序列數(shù)據(jù)為測試集.需要說明的是,由于這一問題比較簡單且訓(xùn)練集較大,所提算法和Adam 運行一個Epoch基本即可收斂,為了更好地對各算法性能進(jìn)行區(qū)分,只取訓(xùn)練集前7 000 條和測試集前3 700 條數(shù)據(jù)并分別隨機(jī)置亂進(jìn)行訓(xùn)練和測試.
該問題所用RNN 模型結(jié)構(gòu)設(shè)置如下:1)輸入層輸入時間步為24,輸入向量維度為8.2)隱藏層時間步為24,神經(jīng)元數(shù)為50,激活函數(shù)為 tanh(·).3)輸出層時間步為24,神經(jīng)元數(shù)為1,激活函數(shù)為identity(·).RNN 模型權(quán)重參數(shù)的初始化按第4.3 節(jié)方式同樣處理.
在收斂性能對比驗證中,各優(yōu)化算法超參數(shù)設(shè)置如下:RLS 遺忘因子采用第3.2 節(jié)自適應(yīng)方式,其參數(shù)κ=2,λmax=0.9999,q0=10,μ0=7/8,?1=6,?2=18,ξ=10-15,魯棒性實驗中自適應(yīng)參數(shù)與此相同,RLS 的比例因子η為1,協(xié)方差矩陣初始化參數(shù)α為0.4,正則化因子γ為0.000001;SGD 學(xué)習(xí)率為0.05;Momentum 學(xué)習(xí)率為0.05,動量參數(shù)0.8;Adam 學(xué)習(xí)率0.001,β1設(shè)為0.9,β2設(shè)為0.999,?設(shè)為 10-8.在超參數(shù)α和η選取的魯棒性驗證中,同樣采用控制變量法進(jìn)行測試:1)固定γ=0.000001和η=1,依次選取α=0.01,0.1,0.2,···,1驗證;2)固定γ=0.000001 和α=0.4,依次選取η=0.1,1,2,···,10 驗證.
在上述設(shè)定下,每一Epoch 均將訓(xùn)練集隨機(jī)劃分成140 個迷你批,批大小為50.每訓(xùn)練完一個Epoch,便從測試集中隨機(jī)生成50 個迷你批進(jìn)行測試,統(tǒng)計其均方誤差損失.實驗結(jié)果如圖2(d)、表2和表3 所示.由圖2(d)可知,SGD、Momentum、Adam 的損失初期均較大,收斂速度較緩慢;而RLS 的曲線幾乎在第1 個Epoch 就收斂完成,因此其收斂速度要優(yōu)于3 個對比優(yōu)化算法.表2 和表3記錄了該實驗取不同的α和η時在第50 Epoch的平均MSE.表2 中在取不同α?xí)r,其MSE 上下波動幅度較小,且沒有明顯的變化趨勢,因此我們認(rèn)為α對算法性能影響較小.由表3 可知,對η取不同值時,其平均MSE 在 1.50×10-3到1.59×10-3間波動,整體來說浮動范圍較小.綜上,RLS 算法的α和η取值都具有較好的魯棒性.
5 結(jié)論與展望
在RNNs 優(yōu)化訓(xùn)練中,現(xiàn)有一階優(yōu)化算法學(xué)習(xí)速度較慢,而二階優(yōu)化算法和以前的RLS 類型優(yōu)化算法時空復(fù)雜度又過高.為此,本文提出了一種新的RLS 優(yōu)化算法.該算法吸收了深度學(xué)習(xí)中廣為應(yīng)用的迷你批訓(xùn)練學(xué)習(xí)模式,在推導(dǎo)過程中我們將研究重點放置在隱藏層和輸出層的非激活線性輸出上,通過等價梯度替換,最終得到各層權(quán)重參數(shù)的遞歸最小二乘解.所提算法只需在RNNs 的隱藏層和輸出層各添加一個協(xié)方差矩陣,解決了長期以來RLS 優(yōu)化算法應(yīng)用時需要為隱藏層和輸出層的每一神經(jīng)元設(shè)置一個協(xié)方差矩陣的問題,極大地降低了時空復(fù)雜度,使得RLS 可以適用于較大規(guī)模的RNNs 訓(xùn)練.在此基礎(chǔ)上,采用遺忘因子自適應(yīng)調(diào)整和正則化技術(shù)對所提算法作了改進(jìn),進(jìn)一步提高了所提算法的性能.4 組仿真實驗表明,所提算法在收斂性能、穩(wěn)定性以及超參數(shù)選取的魯棒性等方面均要明顯優(yōu)于主流一階優(yōu)化算法,能夠有效加快RNNs 模型的訓(xùn)練速度,降低超參數(shù)的選擇難度.此外,在實驗過程中我們還發(fā)現(xiàn)所提算法可緩解梯度消失導(dǎo)致RNNs 無法訓(xùn)練的問題.如何將本算法擴(kuò)展到RNNs 以外的其他深度學(xué)習(xí)網(wǎng)絡(luò)以及如何進(jìn)一步降低所提算法的時空復(fù)雜度將是我們下一步工作的重點.
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
