一種基于三維目標模型及RCS庫的目標回波模擬方法研究
2022-08-30 03:43:20彭新家周紅峰
艦船電子對抗 2022年4期
彭新家,朱 平,周紅峰
(中國船舶集團有限公司第八研究院,江蘇 揚州 225101)
0 引 言
隨著模擬仿真技術的不斷發(fā)展,其已廣泛應用于雷達等領域,用于快速、低成本地檢驗雷達各項性能,以及支持雷達操作員的實操訓練。特別是在雷達目標模擬方面,通過設計半實物仿真硬件實物和建立的數(shù)學模型,實現(xiàn)雷達目標回波的模擬。傳統(tǒng)的雷達目標回波模擬方法,是將雷達的發(fā)射信號經(jīng)目標調制后獲取延遲信號,利用典型的起伏目標統(tǒng)計模型(Swerling1~Swerling4模型),實現(xiàn)基于統(tǒng)計規(guī)律經(jīng)驗的雷達目標回波模擬。然而,隨著近些年來對電磁藍軍模擬的要求越來越高,僅依據(jù)統(tǒng)計模型的目標對象模擬,不能真實反映目標動態(tài)條件下的RCS特性,已不滿足現(xiàn)階段某些高逼真度模擬要求。為了實現(xiàn)更高逼真度的雷達目標回波模擬,本文擬通過建立典型藍軍目標的精細化三維目標模型,利用軟件生成目標在不同工作頻率、方位角和入射角的雷達截面(RCS)序列,形成RCS庫。在目標模擬時,實時調用上述RCS時域拓展序列,與雷達發(fā)射中頻基帶信號進行卷積,生成具有目標RCS特性的雷達目標回波。因此,基于三維目標模型及RCS庫的目標回波方法,可有效解決電磁藍軍目標模擬不逼真的問題,更全面地驗證雷達對目標的探測性能,具有重要的研究意義。
1 目標對象模型研究
在生成目標RCS序列之前,需針對模擬的目標對象進行外型三維建模。目標對象的三維模型越逼真,在不同角度下越接近于真實目標的各模塊組件(含負載)尺寸,后續(xù)生成的目標RCS特性數(shù)據(jù)也越接近于實際目標運動時的RCS值,從而也使模擬的目標回波越逼真。
因此,在依據(jù)有關目標對象的性能參數(shù)和相關資料完成三維建模后,需對該目標的模型進行驗證,驗證目標模型與真實目標模型的吻合度,最后再利用高吻合度的三維模型生成該目標的RCS特性數(shù)據(jù)。
1.1 目標三維建模
對目標進行三維建模,是為了模擬更加逼真的雷達目標,在雷達探測目標時呈現(xiàn)更真實的目標回波散射特性。所以,需針對具體雷達,選擇其典型藍軍作戰(zhàn)對象進行分析,如作戰(zhàn)時可能遇到的飛機或導彈等。本文在分析研究時,選擇一型戰(zhàn)斗機,依據(jù)其詳細機長、翼展、高度、進氣口寬度等一系列戰(zhàn)斗機幾何尺寸,以及其在戰(zhàn)斗時掛載的導彈參數(shù),建立該戰(zhàn)斗機高精細度的三維目標模型,其2個角度的展示效果如圖1所示。
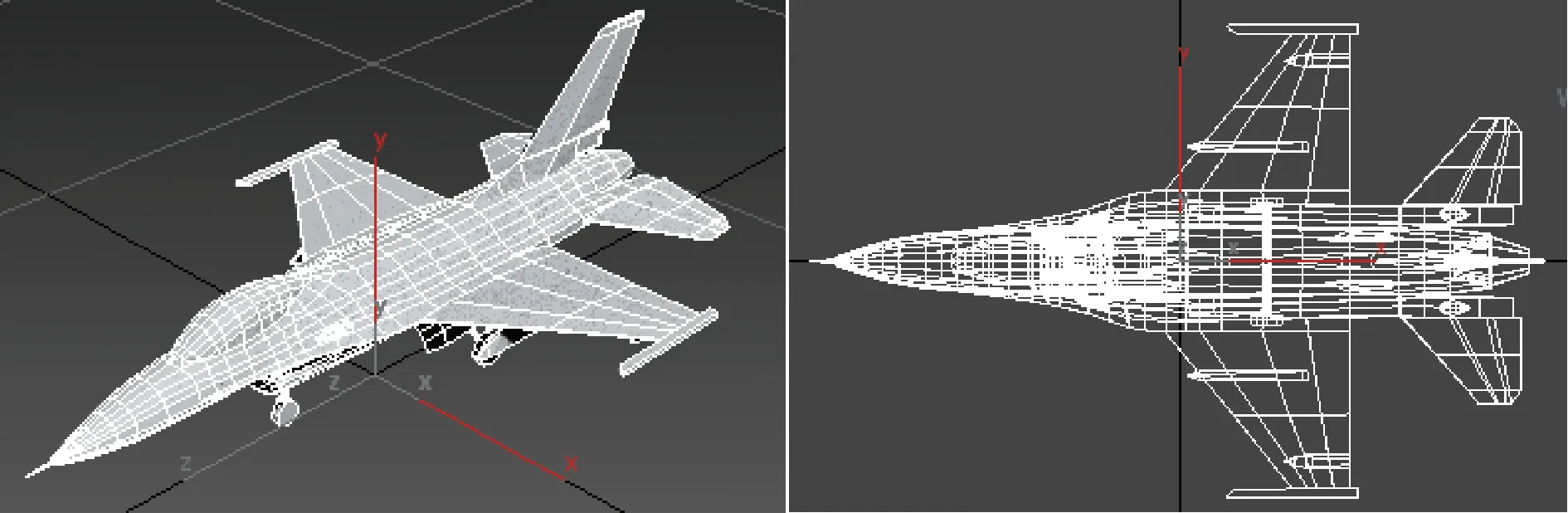
圖1 某戰(zhàn)斗機的三維模型
1.2 目標模型驗證
在建立完目標三維模型后,需對目標模型的外觀及幾何尺寸進行驗證。本文從模型幾何尺寸和逆合成孔徑雷達(ISAR)成像2個方面進行對比驗證。
(1) 模型幾何尺寸對比驗證
在驗證模型的幾何尺寸時,從相關資料獲取該戰(zhàn)斗機在某一角度的實物照片,將建立的三維模型調整成同一視角,與實物照片進行重合對比,如圖2所示。

圖2 某戰(zhàn)斗機的三維模型與實物照片對比
依據(jù)該戰(zhàn)斗機的公開資料尺寸,結合模型的實際測量尺寸,獲取模型各組件(含負載)的幾何尺寸誤差。若某一項幾何尺寸誤差超出誤差允許范圍,則對目標三維模型進行修正,直到滿足誤差要求為止。
(2) 模型和ISAR成像對比驗證
將建立的目標三維模型進行特定角度下的RCS計算與ISAR成像,獲得ISAR成像結果圖像。
以上述戰(zhàn)斗機為例,將入射角45°、方位角45°的垂直極化成像結果和三維模型進行對比,對比結果如圖3所示。
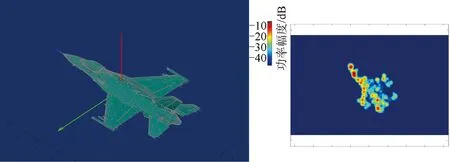
圖3 某戰(zhàn)斗機的三維模型與ISAR成像對比
根據(jù)上述對比圖可知,ISAR成像的戰(zhàn)斗機輪廓與三維模型基本一致。
通過將建立的目標三維模型分別與實物照片及ISAR成像對比,獲取了較為理想的目標模型,為下一步基于目標模型的RCS特性數(shù)據(jù)生成奠定了基礎。
2 目標RCS特性數(shù)據(jù)生成研究
2.1 目標RCS特性數(shù)據(jù)產生
利用建立的高精度目標三維模型生成其RCS特性數(shù)據(jù),主要是通過成熟的專業(yè)商業(yè)軟件實現(xiàn)的。通過向軟件中導入三維模型文件,調用軟件中表面材料庫,并設置各材料的分布。最后,通過設置工作頻率、極化方式、入射角和方位角等參數(shù),利用軟件計算,獲得上述條件下的目標RCS值。
因目標對象的RCS值與雷達的工作頻率、發(fā)射/接收極化、目標相對雷達發(fā)射信號的入射角和方位角有關,而雷達在探測目標時上述參數(shù)均可能發(fā)生變化,故在借助目標RCS值進行目標回波模擬時,需建立覆蓋雷達工作頻率、極化以及不同入射角和方位角的目標RCS庫,根據(jù)想定的目標運動軌跡和雷達工作參數(shù),實時調用RCS庫中對應的RCS時域拓展序列,與雷達回波模擬器中儲頻的相應信號進行處理,從而生成帶有上述RCS特性的雷達目標回波。
為了方便調用目標RCS庫,RCS庫中的特性數(shù)據(jù)格式可如表1所示。

表1 目標對象RCS數(shù)據(jù)格式
數(shù)據(jù)存儲時,可先后改變頻率、入射角和方位角對RCS值進行依次存儲。頻率需覆蓋雷達工作頻點,可預設頻率步進。入射角范圍為-90°~+90°,方位角范圍為0°~360°,預設角度步進。
2.2 目標RCS特性分析
在產生目標RCS特性數(shù)據(jù)后,對目標對象的RCS特性進行分析驗證。將導出的RCS數(shù)據(jù)利用MATLAB軟件進行分析,分析內容主要包括以下3個方面。
(1) RCS特性
在同一工作頻率,就某一極化和入射角在0°~360°方位角下進行RCS仿真分析,獲取該條件下目標對象RCS特性曲線。
以上述戰(zhàn)斗機為例,在頻率9 GHz、VV極化下,入射角為45°時,其RCS特性曲線如圖4所示。
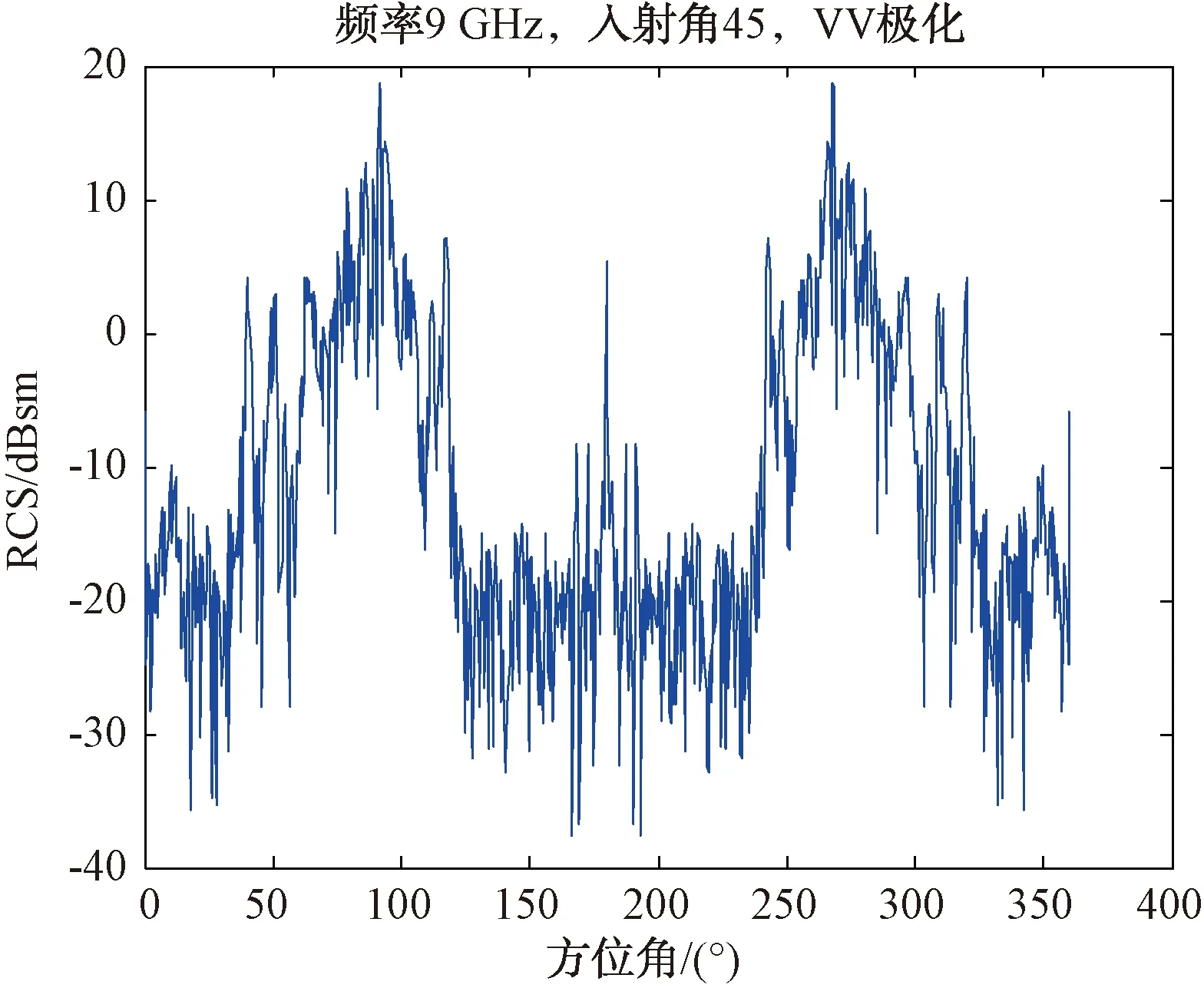
圖4 某戰(zhàn)斗機的RCS特性曲線圖
(2) 高分辨率一維距離像
在同一入射角,就某一極化和方位角在一定頻段下進行一維距離像仿真,獲得該條件下目標對象的高分辨率一維距離像。
以上述戰(zhàn)斗機為例,在VV極化、入射角45°和方位角45°下,頻率范圍為8.5~9.5 GHz時,其高分辨率一維距離像如圖5所示。
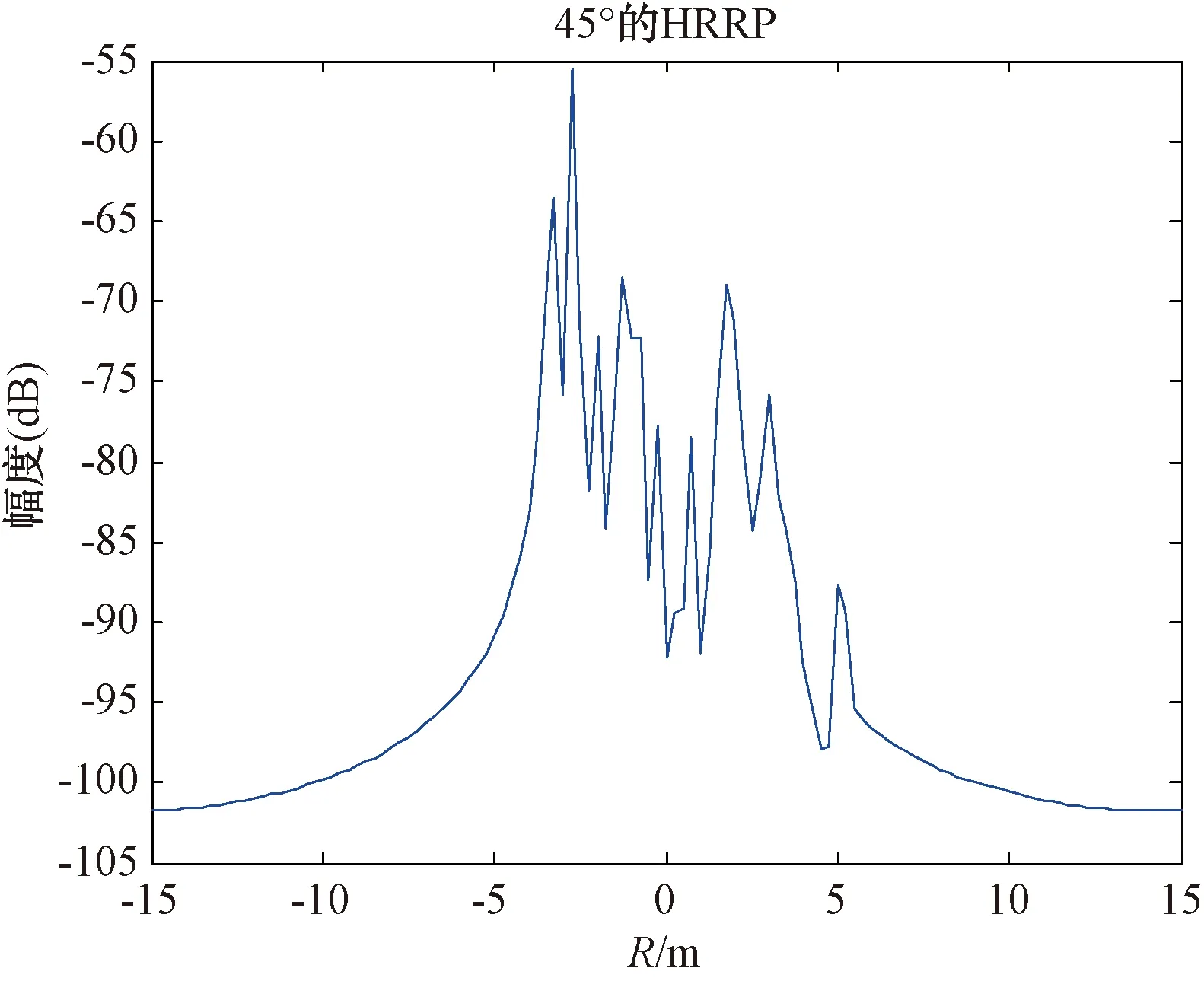
圖5 某戰(zhàn)斗機的高分辨率一維距離像
(3) ISAR像
在同一入射角,就某一極化在一定頻段和一定方位角下進行ISAR仿真,獲得該條件下目標對象的ISAR圖像。
以上述戰(zhàn)斗機為例,在VV極化、入射角45°下,頻率范圍為8.5~9.5 GHz、方位角范圍為41.8°~48.2°時,其ISAR圖像如圖6所示。
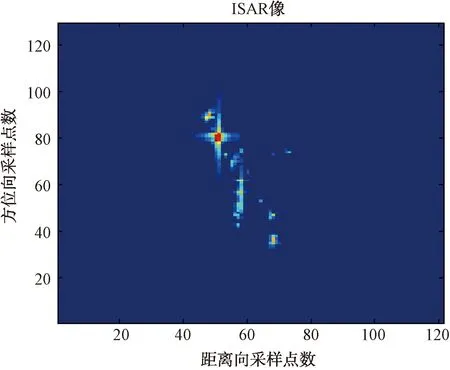
圖6 某戰(zhàn)斗機的ISAR圖像
3 目標回波模擬研究
3.1 目標回波模擬方法
在完成目標RCS特性數(shù)據(jù)庫構建后,將RCS數(shù)據(jù)與雷達激勵信號進行卷積,經(jīng)調制后生成雷達目標回波信號。
在目標回波模擬過程中,首先根據(jù)目標預設的運動航跡解算出目標相對雷達的角度關系(方位角和俯仰角),經(jīng)插值形成目標的入射角和方位角序列。根據(jù)序列查詢調用RCS特性數(shù)據(jù),形成帶有時間特性的目標RCS拓展時間序列。另一方面,雷達目標回波模擬器在接收到雷達發(fā)射激勵后經(jīng)下變頻和數(shù)字儲頻,形成雷達中頻基帶信號。將該中頻基帶信號與上述目標RCS拓展時間序列進行時序卷積,經(jīng)多普勒、幅度及時延調制后,進行上變頻及功率放大,形成具有目標RCS特性的雷達目標回波信號。雷達目標回波模擬流程如圖7所示。
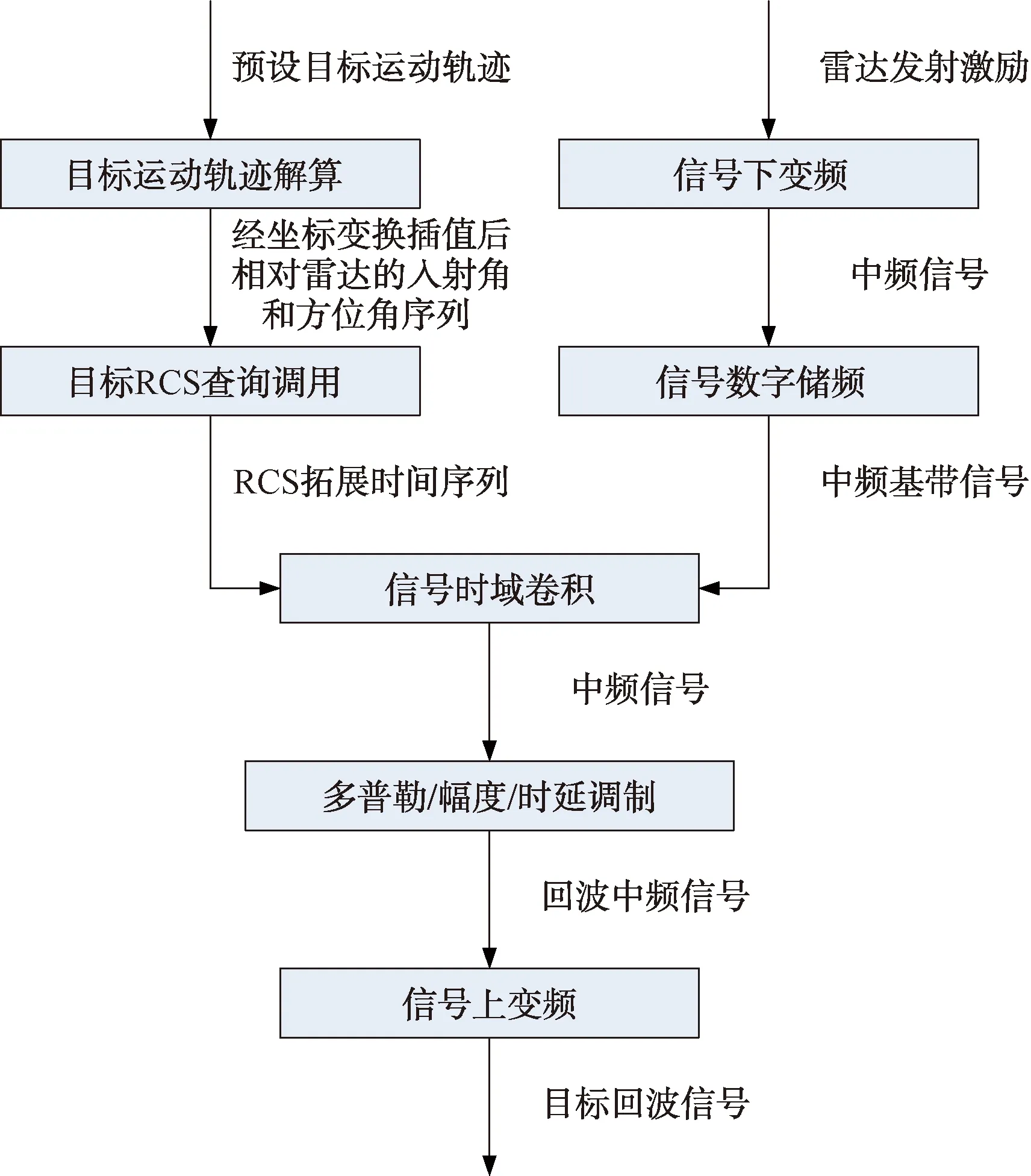
圖7 雷達目標回波模擬流程
3.2 目標回波模型
3.2.1 目標運動軌跡解算模型
目標以戰(zhàn)斗機為例,其運動航跡存在直線、轉彎、加速轉彎和爬升等軌跡。在進行目標運動軌跡解算時,關注的是目標相對雷達的方位角和俯仰角,這就涉及到戰(zhàn)斗機到雷達坐標系的轉換。具體過程包括雷達地理坐標系到地心坐標系轉換、目標地心坐標系到北天東坐標系轉換、雷達北天東坐標系到雷達天線陣面坐標系轉換以及雷達天線陣面坐標系到極坐標系轉換。
(1) 雷達地理坐標系到地心坐標系轉換
定義雷達的地理坐標為(,,),其地心坐標系為(,,),則雷達的地心坐標為:
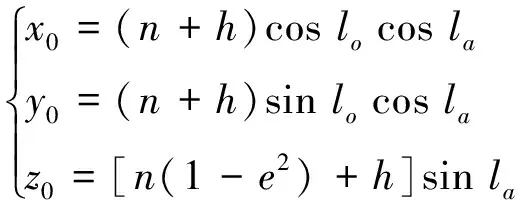
(1)
式中:,,分別為雷達的經(jīng)度、緯度和高度;,分別為地球的卯酉圈曲率半徑、第一偏心率。
(2)
(3)
式中:,分別為地球的長半軸和短半軸,=6 378 136.49 m,=6 356 755.00 m。
(2) 目標地心坐標系到北天東坐標系轉換
定義目標的地心坐標系為(,,),其以雷達天線陣面中心為北天動坐標原點的坐標系為(,,),則目標北天東坐標為:

(4)
式中:,分別為目標的經(jīng)度和緯度。
(3) 北天東坐標系到雷達天線陣面坐標系轉換
定義雷達天線陣面繞正東方旋轉,繞地理北極旋轉,目標在天線陣面坐標系下的坐標為(,,),則目標雷達天線陣面坐標為
(5)
(4) 雷達天線陣面坐標系到極坐標系轉換
定義目標在極坐標下的方位角和俯仰角坐標為(,),則目標相對雷達的方位角和俯仰角坐標為:

(6)

3.2.2 目標RCS時域拓展序列模型

()=()·exp(j2π)
(7)
3.2.3 目標回波模型
現(xiàn)對雷達發(fā)射激勵信號進行定義,記為(),則將采樣點延遲和多普勒處理后的信號與上述RCS時域拓展序列進行卷積計算,即可得到帶有目標RCS特新的雷達目標回波信號:

(8)
式中:為第個采樣點的延遲,可根據(jù)目標速度和雷達距離進行計算。
3.3 目標回波驗證分析
為了驗證目標回波模擬的逼真度,將利用雷達目標回波模擬器模擬的目標回波數(shù)據(jù)與理論仿真數(shù)據(jù)進行對比驗證。
(1) 利用一矢量信號源輸出一定帶寬的線性調頻(LFM)信號作為雷達目標回波模擬器的發(fā)射激勵,注入模擬器;
(2) 通過模擬器加載上述戰(zhàn)斗機的目標RCS特性數(shù)據(jù),按照本文描述的目標回波模擬方法,生成該戰(zhàn)斗機的目標回波數(shù)據(jù);
(3) 在目標回波模擬過程中,以某一采樣率對回波中頻信號進行采集,解析后進行脈壓處理,獲得回波信號匹配濾波后的脈壓結果;
(4) 利用Matlab產生與(1)相同的LFM信號,作為仿真輸入,并將(2)中的RCS特性數(shù)據(jù)加入調制;
(5) 以與(3)中相同采樣率采樣得到目標的回波中頻仿真數(shù)據(jù),同樣進行脈壓處理,獲得仿真回波信號匹配濾波后的脈壓結果;
(6) 將(3)與(5)中脈壓結果進行對比驗證,對比結果如圖8所示。
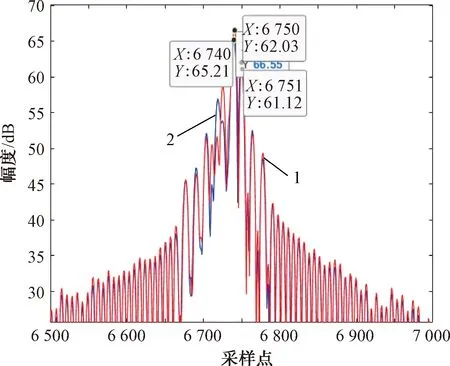
圖8 實際模擬目標回波與理論仿真數(shù)據(jù)對比
圖8中曲線1為利用雷達目標回波模擬器實際模擬的目標回波的脈壓處理結果,曲線2為理論仿真的目標回波的脈壓處理結果。
在統(tǒng)計學上,采用皮爾遜積矩相關系統(tǒng)(PPMCC)來度量2個數(shù)據(jù)序列之間的相關性,是一種常見方法。其定義如下:
(9)

4 結束語
針對雷達目標回波模擬的問題,介紹了一種基于三維目標模型及RCS庫的目標回波模擬方法。該方法通過建立模擬目標的精細化三維模型,利用軟件生成該目標的RCS特性數(shù)據(jù),形成在工作頻率、極化、入射角及方位角幾個維度的目標RCS庫。在想定目標運動軌跡下,通過實時調用RCS時域拓展序列,利用目標回波模型,完成了具有目標RCS特性的雷達目標回波模擬。在目標回波模擬過程中,以某型戰(zhàn)斗機為例,先后通過模型驗證、RCS特性分析及目標回波驗證分析,確保了目標回波模擬的逼真度。結果表明,該目標回波模擬方法是一種能夠提高目標模擬逼真度的有效方法。
但同時,由于該目標模擬方法高度依賴目標三維模型及RCS庫,需要獲取模擬目標較詳細的幾何參數(shù)、氣動布局及表面材料分布等信息,對情報要求較高。另外,目標模擬針對特定目標,模擬對象具有一定的局限性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03