一種非均勻噪聲條件下基于子空間的實值DOA估計方法
2022-08-30 08:58:56朱揚輝
艦船電子對抗 2022年4期
關鍵詞:方法
何 莉,朱揚輝,唐 龍
(長海發展有限責任公司,廣西 桂林 541000)
0 引 言
波達方向(DOA)估計是陣列信號處理領域的一個重要研究課題,已廣泛應用于各種場景,如無線通信、雷達、聲納、導航、地震探測和醫學等。經典的DOA估計算法包括:多重信號分類算法(MUSIC)、信號參數估計旋轉不變技術(ESPRIT)和最大似然(ML)估計算法等。這些方法可以獲得較高的角度分辨率,實際應用廣泛。但其均是在均勻白噪聲的條件下提出的,當噪聲是非均勻噪聲時,由于不正確的噪聲模型會導致基于均勻白噪聲假設下的傳統 DOA 估計算法性能顯著下降。
在實際中,由于接收通道硬件不理想及外界影響,各傳感器中的噪聲可能為不相關的非均勻高斯白噪聲。近年來,針對非均勻噪聲下的DOA估計問題,研究學者提出諸多新穎的方法。在文獻[5]中,一種非均勻噪聲條件下的ML 估計算法被提出,通過迭代方法求解角度估計。但由于對初始值的設置較嚴格,并且計算量巨大,從而限制了該算法的實際工程應用。文獻[6]提出了2個基于子空間的DOA 估計方法,通過利用ML 和最小二乘(LS)技術循環迭代的方法來估計信號和噪聲子空間,以此獲得DOA估計。該算法同樣需要預設初始值,并且隨著迭代次數的增加,該算法也相當耗時。由于核范數最小作為非凸優化問題秩最小問題的最優凸松弛,而被廣泛地應用到解決秩最小問題,并且有學者已將該技術成功應用于非均勻噪聲條件下的DOA估計中。文獻[7]提出了一種基于子空間無迭代(NB)DOA估計算法,該方法通過對陣列協方差矩陣進行特殊分解后,再經過2次特征值分解后,便可消除非均勻噪聲的干擾,無需迭代和凸優化過程。然而,由于其需要對復值協方差矩陣進行特征值分解,仍然具有一定的計算復雜度。
針對復值協方差矩陣特征值分解計算復雜度高的問題,酉變換技術已被應用到諸多DOA估計算法中。在文獻[8]中,實值MUSIC算法被提出。該算法利用center-Hermitian矩陣性質,將復值協方差矩陣轉換為實值協方差矩陣。對該矩陣進行特征值分解和空間譜搜索時,僅需要考慮實值。相似地,文獻[9]提出了實值ESPRIT算法,該算法可以提供更低的計算復雜度。然而,由于酉變換技術使用了前后向平滑技術,可能會導致估計性能下降,因此文獻[10]提出實值求根MUSIC算法,該算法沒有出現這種性能下降。上述基于酉變換技術的DOA估計方法可以有效降低計算復雜度,同時提供較好的DOA估計性能。
考慮到非均勻噪聲下DOA估計算法存在的問題以及酉變換技術的優點,本文在非均勻噪聲背景下利用基于子空間無迭代方法和酉變換技術,提出一種基于子空間的實值DOA估計方法,以改善非均勻噪聲條件下DOA估計性能。該方法首先利用酉變換技術將陣列協方差矩陣轉換為實值協方差矩陣,以提高計算效率;然后對實值協方差矩陣進行特殊分解,并構造特定向量獲得實值噪聲協方差矩陣,以消除非均勻噪聲的干擾;最后,對實值協方差矩陣和實值噪聲協方差矩陣進行廣義特征分解估計噪聲子空間,并利用傳統的實值MUSIC算法獲得最終的DOA估計。該算法無需迭代和凸優化過程,可以以較低的計算復雜度獲得高分辨的DOA估計結果。
1 信號模型
考慮一個包含有個陣元的均勻線陣,相鄰陣元之間的間距為=2,其中表示信號波長。假設有個遠場窄帶信號,從方向,,…,入射到陣列上,接收信號矢量可以表示為:
()=()+()
(1)

通過收集次采樣快拍,式(1)可以改寫為:
=+
(2)
由此,陣列協方差矩陣可以表示為:
={()()}=+
(3)

(4)
2 算法描述
在基于子空間的DOA估計算法中,需要首先估計噪聲協方差矩陣,然后利用噪聲子空間和導向矢量的正交特性來估計DOA。提出的方法首先利用酉變換技術將復值協方差矩陣實值化,以有效降低計算復雜度。
眾所周知,如果一個矩陣是centro-Hermitian矩陣,那么其滿足:
=
(5)
式中:表示×維的交換矩陣,其副對角線元素等于1,其他為0。
那么,矩陣可以轉化為一個實值對稱矩陣:

(6)
式中:表示酉矩陣,其奇數階和偶數階可以分別表示為:
(7)
(8)
式中:表示×維的單位矩陣;表示×維的全矩陣。
值得一提的是,對實值對稱矩陣進行特征值分解時,僅需要考慮實數,即沒有復數的乘法運算。然而,由于式()中的噪聲協方差矩陣是非均勻的,每一個陣元上的噪聲功率互不相等。因此,只是一個Hermitian矩陣,并不是一個對稱矩陣。根據文獻[],對執行對稱估計,能夠近似轉變為一個centroHermitian矩陣,具體轉換如下:
()
式中:是在歐氏距離意義下的的最優Hermitian對稱估計;[·]表示共軛。
因此,實值陣列協方差矩陣可以表示為:

()
將式()和式()代入式()后,可以得到:

()


()


()
至此便完成酉變換的轉換,得到實值陣列協方差矩陣。接下來,將對矩陣進行分解,以消除非均勻噪聲的影響。
通過觀察,陣列協方差矩陣可以分解成個矩陣之和,如下所示:
rr
()
式中:
()

()
式中:表示第個信號的信號功率;矩陣r的對角線上元素等于,非對角線上元素等于矩陣;矩陣r是一個對角矩陣,其對角線上元素等于矩陣對角線上的元素。
根據子空間算法可知,()是一個×滿秩的矩陣,其MP維正交矢量(i,…,MP)應滿足如下等式:
()
(17)
又根據文獻[8]可知,實值的可以通過下式獲得:

(18)
將式(11)兩邊同乘,并且利用式(17)和式(18),可得:

,=1,…,-
(19)
通過式(19)可知,正交矢量(=1,…,-)是由矩陣和矩陣進行廣義特征值分解后張成的噪聲子空間。然而,由于矩陣是未知的,正交矢量(=1,…,-)在非均勻噪聲條件下,不能夠直接獲得。
將式(14)帶入式(19),可得:

(20)


首先,將實值噪聲協方差矩陣分解成2個對角矩陣:
=+
(21)
式中:表示為稍后計算的傳感器噪聲功率的公共部分;為對角矩陣,其對角元素除一個元素等于0外,其余元素均為非零元素,并且這個零元素的位置就是矩陣的對角元素中最小元素所對應的位置。
此外,構造一個-1維單位矢量,滿足:
(22)
式中:的值等于diag()最小值的位置下標,即滿足:
(23)


(24)


(25)
因此,可以計算為:

(26)
式中:|·|表示絕對值運算符。
那么,矩陣可以通過下式獲得:
=diag{[]-,…,[],-}
(27)
式中:表示矩陣中的對角元素中最小對角元素的值。
利用式(21)可以獲得矩陣。最后,根據文獻[7]對矩陣和矩陣進行廣義特征值分解,可以獲得更加精確的噪聲子空間。
當獲得噪聲子空間后,便可以利用傳統的實值MUSIC算法通過搜索空間譜估計個信號的DOA:

(28)

3 仿真分析

(29)

圖1展示了MUSIC算法和所提算法的空間譜。在本次試驗中,假設信噪比=0 dB,采樣快拍數=500。從圖中可以看出,MUSIC算法由于受非均勻噪聲的干擾,會導致分辨率降低,已經無法分辨出2個角度相鄰較近的目標。這也證明了非均勻噪聲對于傳統的角度估計算法具有影響,會導致估計性能顯著下降。然而本文所提出的算法利用2次特征值分解,可以估計出噪聲協方差矩陣,能夠正確分辨出3個目標角度。
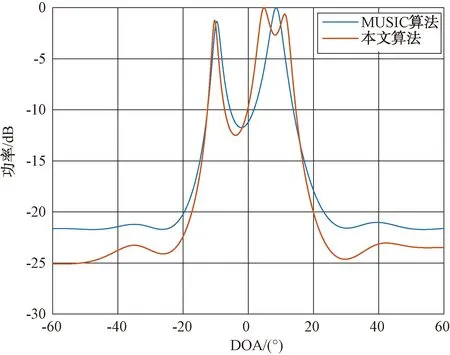
圖1 空間譜
圖2為展示了4種方法和克拉美羅界(CRB)獲得的均方根誤差隨信噪比變化的關系圖,其中,假設采樣快拍數=100。由圖 2可知,當<0 dB時,NB算法比MUSIC算法具有更好的估計性能,這是因為NB算法消除了非均勻噪聲的干擾。而后,由于快拍數較小的原因,MUSIC算法的估計精度優于NB算法。隨著信噪比的增加,噪聲功率逐漸降低,4種算法DOA估計的RMSE均逐漸降低。此外,所提出的方法在整個信噪比變化范圍內總是保持比其他方法優秀的性能。
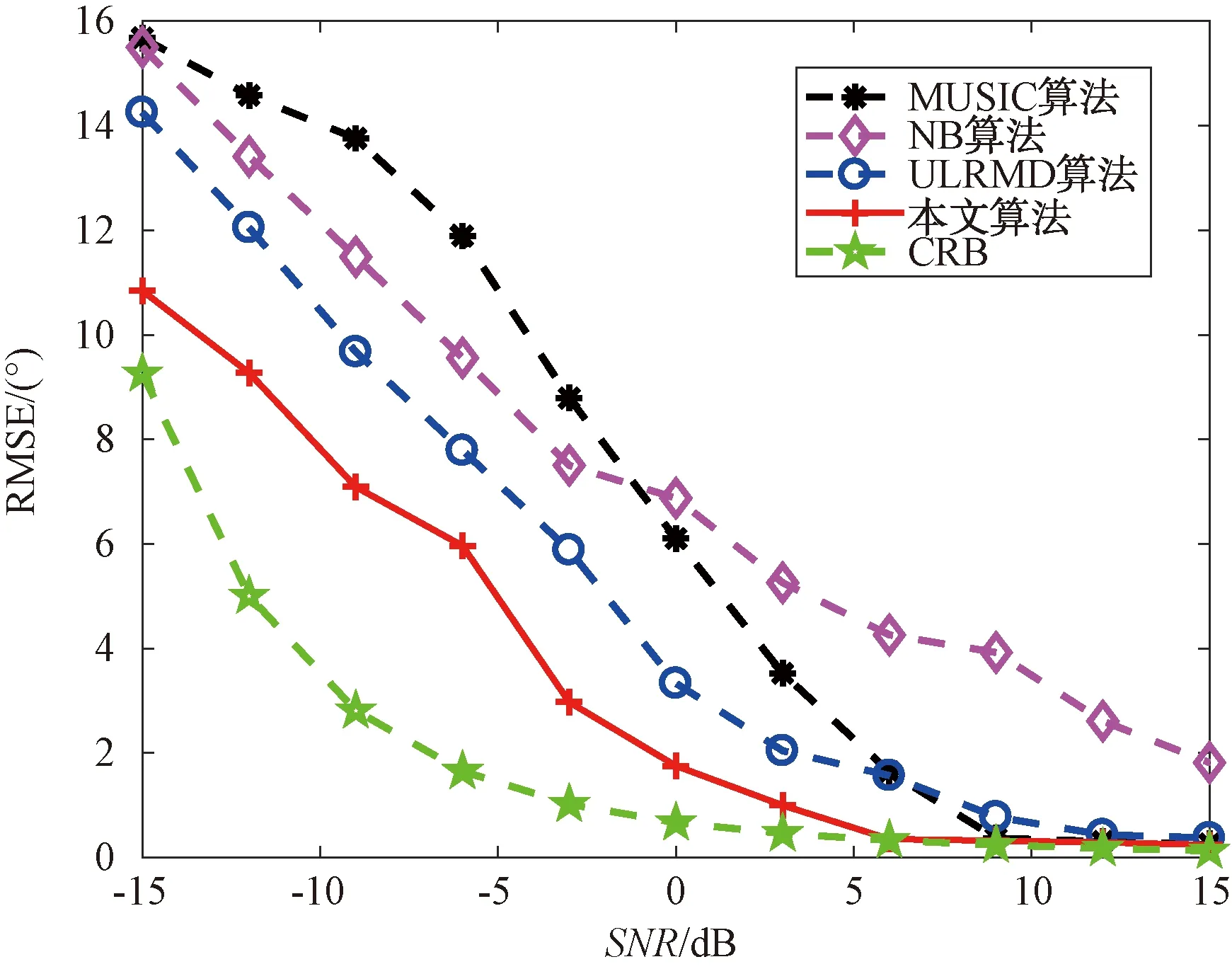
圖2 均方根誤差隨信噪比變化的關系圖
圖3展示了4種方法和克拉美羅界獲得的均方根誤差隨采樣快拍數變換的關系圖。其中,假設=10 dB。在大信噪比條件下,非均勻噪聲的干擾已經不再是影響DOA估計性能的主要因素,故MUSIC算法優于NB算法和ULRMD算法。從圖 3可以看出,NB算法在快拍數較小的條件下,DOA估計精度顯著下降。ULRMD算法和所提的算法由于使用的酉變換技術,加倍快拍數,使得DOA估計精度優于NB算法。ULRMD算法由于使用低秩矩陣完備技術,需要較大的快拍數來恢復低秩矩陣,在快拍數較小的情況下,估計精度低,故MUSIC算法的估計精度優于ULRMD算法。然而,所提出的算法在整個快拍數變化范圍內,所提算法具有優于其他算法的DOA估計性能。
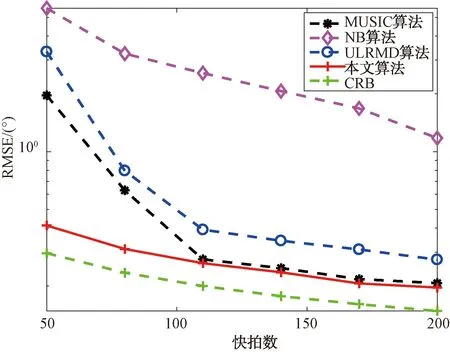
圖3 均方根誤差隨采樣快拍數變化的關系圖
圖4展示了通過不同方法在相關源條件下獲得DOA估計的結果。其中,假設信噪比=5 dB,采樣快拍數=100。本次實驗假設有=2個相干源,分別為=-10°,=0°。從圖 4可以看出,MUSIC算法和NB算法無法分辨出相干信號,然而ULRMD算法和所提出的算法可以分辨出相干信號。這是由于ULRMD算法和所提算法在酉變換技術中,利用了前后向平滑技術,故可以解相干,具備一定的解相干能力。
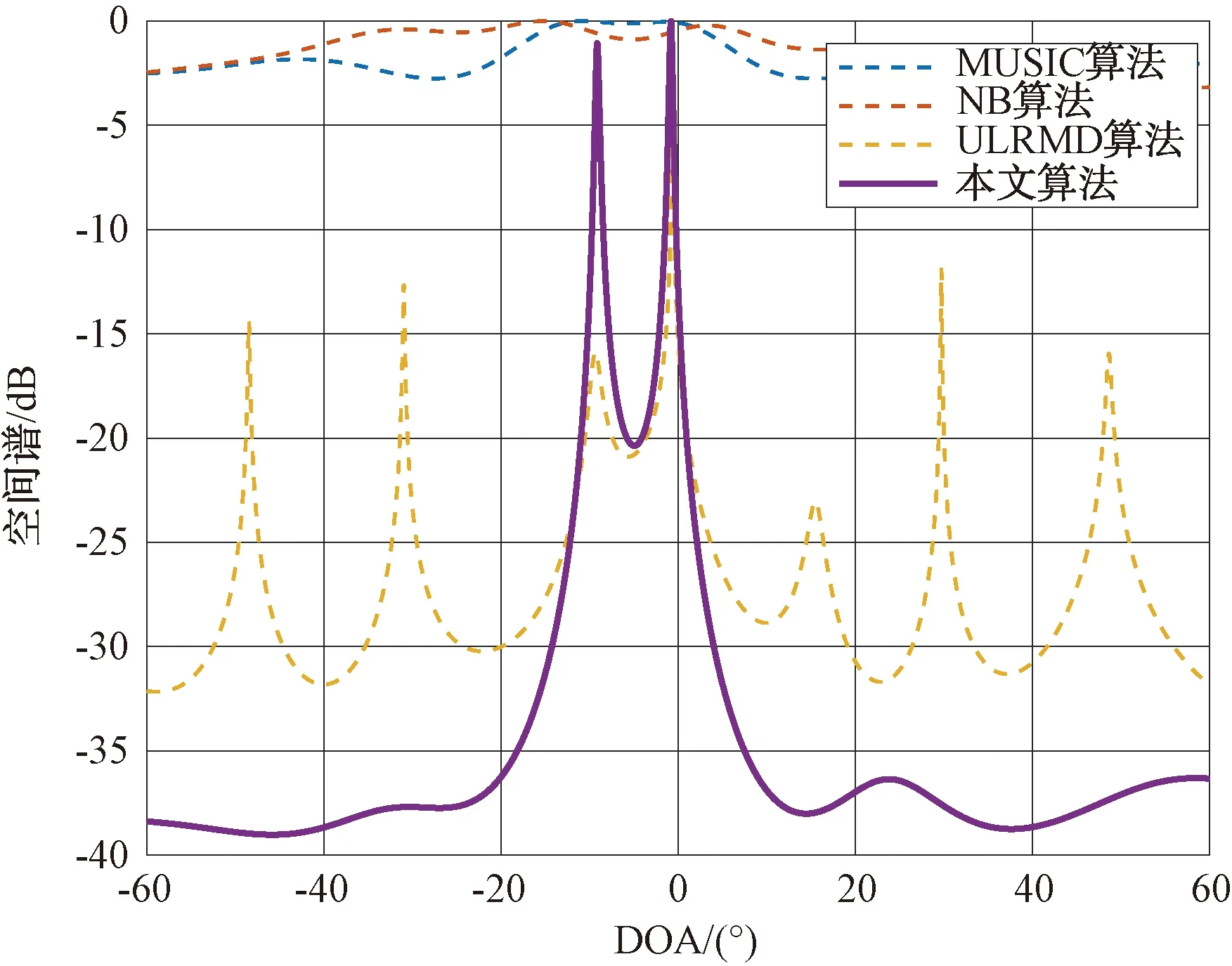
圖4 相干源的空間譜
圖5展示了所提出的方法和ULRMD方法之間的仿真時間比較。其中,假設=0 dB和=100 。從圖 5可以看出,ULRMD算法由于需要凸優化過程,故相比于所提算法需要更多的計算時間。所提算法可以在0.1 s內實現DOA估計,具有一定的實際應用價值。
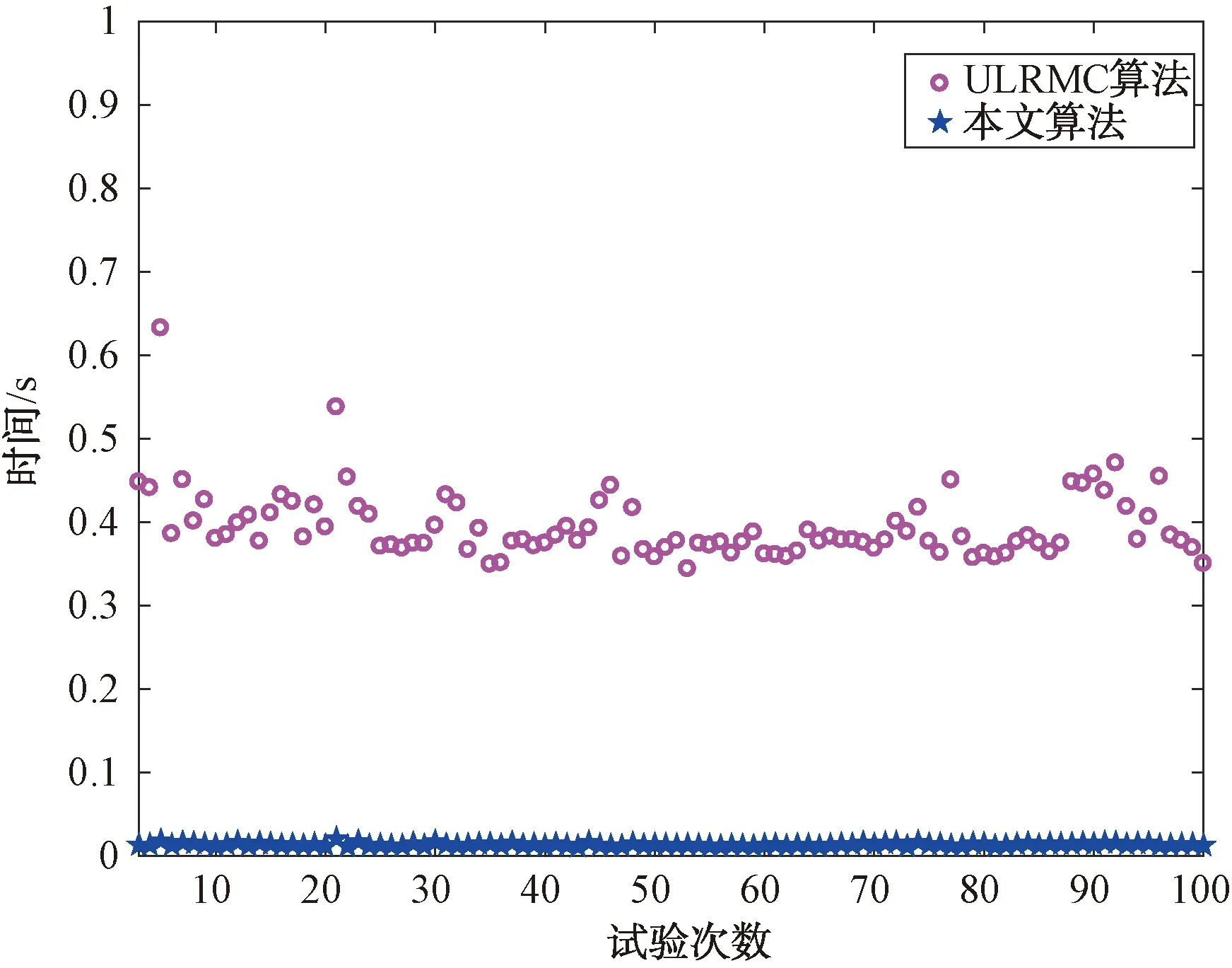
圖5 仿真時間比較
4 結束語
針對非均勻噪聲條件下DOA估計問題,本文提出一種基于子空間的實值DOA估計方法,并通過仿真試驗進行驗證。在不同信噪比和不同快拍數條件下,將所提算法與MUSIC算法、NB算法和ULRMD算法進行比較。試驗結果表明,該算法能夠有效抑制非均勻噪聲的干擾,提供較好的DOA估計性能。
與NB算法和ULRMD算法相比,所提算法結合酉變換技術,無需迭代或凸優化過程便可以消除非均勻噪聲的影響,具有更高的分辨率和更低的計算復雜度,并且還具有一定的解相干能力和工程價值。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56