多功能汽車防撞雷達陣列天線技術研究
2022-08-26 11:33:02趙彭,王宇
雷達與對抗 2022年2期
趙 彭,王 宇
(中國電子科技集團公司第三十八研究所,合肥 230088)
0 引 言
目前,傳統汽車防撞雷達對目標的定位主要通過距離、速度和角度3個信息實現,因接收天線限制,目標角度測量往往局限于方位角,易將道路上有高度的物體(例如橋梁、道路兩邊的標識牌等)誤判為路面目標。為改變傳統汽車防撞雷達不具備測高功能的缺點,本文提出基于現有收發天線條件下的兩種具有測高功能的雷達天線布陣方式,建立了信號數學模型,并利用干涉測角算法實現了測高功能,分析了測高對方位角估計的影響,給出了其適用場景和限制條件。
1 汽車防撞雷達測高的主要性能要求
汽車防撞雷達的使用場景為道路,所以需要測量高度的目標一般為橋梁、道路兩邊標識牌及紅綠燈等,這些目標的高度一般不會超過6 m。考慮實際應用情況和雷達收發天線設計,對汽車防撞雷達測高性能的要求如下:
探測目標距離范圍:40 ~80 m;
探測目標高度范圍:3~6 m;
俯仰角探測范圍:-10°~10°;
俯仰角探測精度:0.5°。
探測高度分別為3 m、4 m、5 m、6 m的目標時,俯仰角隨距離的變化關系如表1所示。
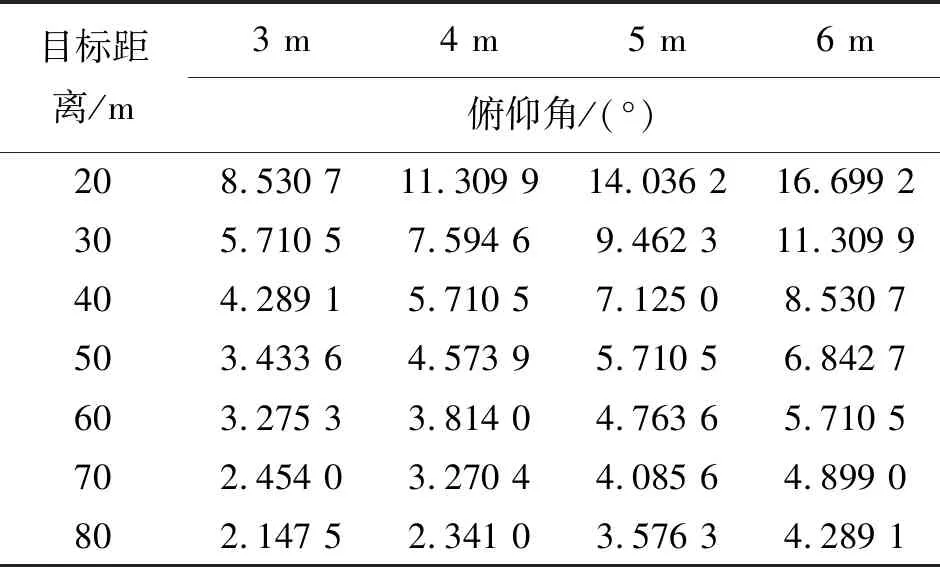
表1 目標距離與俯仰角度對應關系
隨著探測目標距離越來越遠,因受汽車防撞雷達探測威力等影響,信噪比會下降。本文俯仰角測量采用干涉測角算法,受信噪比影響較大,低信噪比導致目標俯仰角測量精度低,所以測量目標的最遠距離受限。
2 傳統汽車防撞雷達
2.1 天線布陣方式
傳統汽車防撞雷達的兩種天線布陣方式如圖1所示:一發四收和兩發四收,兩幅圖中的4個接收天線均采用致密均勻線性布陣方式,圖1(b)中有兩個發射天線間隔3d,其中d=λ/2。

圖1 傳統汽車防撞雷達天線布陣方式
可以看出傳統汽車防撞雷達均為一維均勻線陣,因其結構簡單,并能體現波達方向估計的基本原理,成為眾多理論算法的研究基礎。但一維均勻線陣只能提供平面180°無模糊的方位角信息[1],無法滿足汽車防撞雷達對目標二維方向信息的需求。
面陣可以得到目標的二維方向信息,其中矩形面陣是比較經典的平面陣,但其陣元數相對較多,存在陣列結構復雜、陣面大、系統造價昂貴的問題,所以在汽車防撞雷達的實際應用中會引發一系列困難。簡化平面陣列后得到L型陣,即將4個接收天線按L型排布,并在此基礎上進行空間信號方位角和俯仰角的二維估計。相同陣元數的L型陣比十字型陣精度高37%[2],但其物理孔徑有限,在節省陣元的同時性能也受限,因而本文對L型天線布陣做了進一步改進。
2.2 測角原理
針對傳統汽車防撞雷達4個接收天線,獲取目標的方位角信息,建立回波信號模型。由于相鄰接收天線之間的距離d=λ/2,所以水平陣列接收到的差頻信號在4個接收天線之間存在連續的相位偏移[3],可表示為
(1)
式中,λ為波長;θ為目標的方位角;n為接收天線編號;φ(n)為兩個接收天線信號間的相位差。
因4個接收天線均勻分布,且間距d為λ/2,保證了測角時不存在相位模糊問題。利用式(1)即可計算得到目標的方位角θ。
汽車防撞雷達中常用的測角算法有干涉測角算法和三維FFT算法兩種:前者精度高,算法簡單,計算量小,在汽車防撞雷達中使用最為廣泛;后者適用于接收天線數大于2的情況,如圖1所示的4個接收天線之間存在固定的相移ω,即目標的回波信號在4個接收天線的相位存在線性關系[0,ω,2ω,3ω],因此通過對4個接收天線上的采樣信號做FFT處理來估計目標的角度。接收天線數較少,即角度維的采樣點數較少,會導致目標的角度分辨力較低。當天線數較多時,雷達天線板的體積較大,成本也會更高,不適用于汽車防撞雷達,所以大多選擇天線數少、體積小的雷達天線板,并利用干涉測角算法進行角度估計。
3 改進汽車防撞雷達
3.1 改進型一發四收天線布陣方式
改進后的一發四收天線的布陣方式如圖2所示,其中圖2(a)只改變了接收天線R1的位置,在不增加任何成本的條件下實現了汽車防撞雷達的測高功能,但與圖1(a)相比,這種布陣方式在增加了測高功能的同時減小了水平方向的天線孔徑和天線數量,導致其方位角的測量精度和分辨能力有所降低。在實際應用中,汽車防撞雷達為降低地雜波的影響,垂直天線方向圖設計較窄,所以垂直方向的天線長度較大,在實際布板時存在很大的困難。為了在實現測高功能的基礎上方便天線布板,進一步改進圖2(a),改進后的天線布陣方式如圖2(b)所示,其中R′1為等效接收天線。
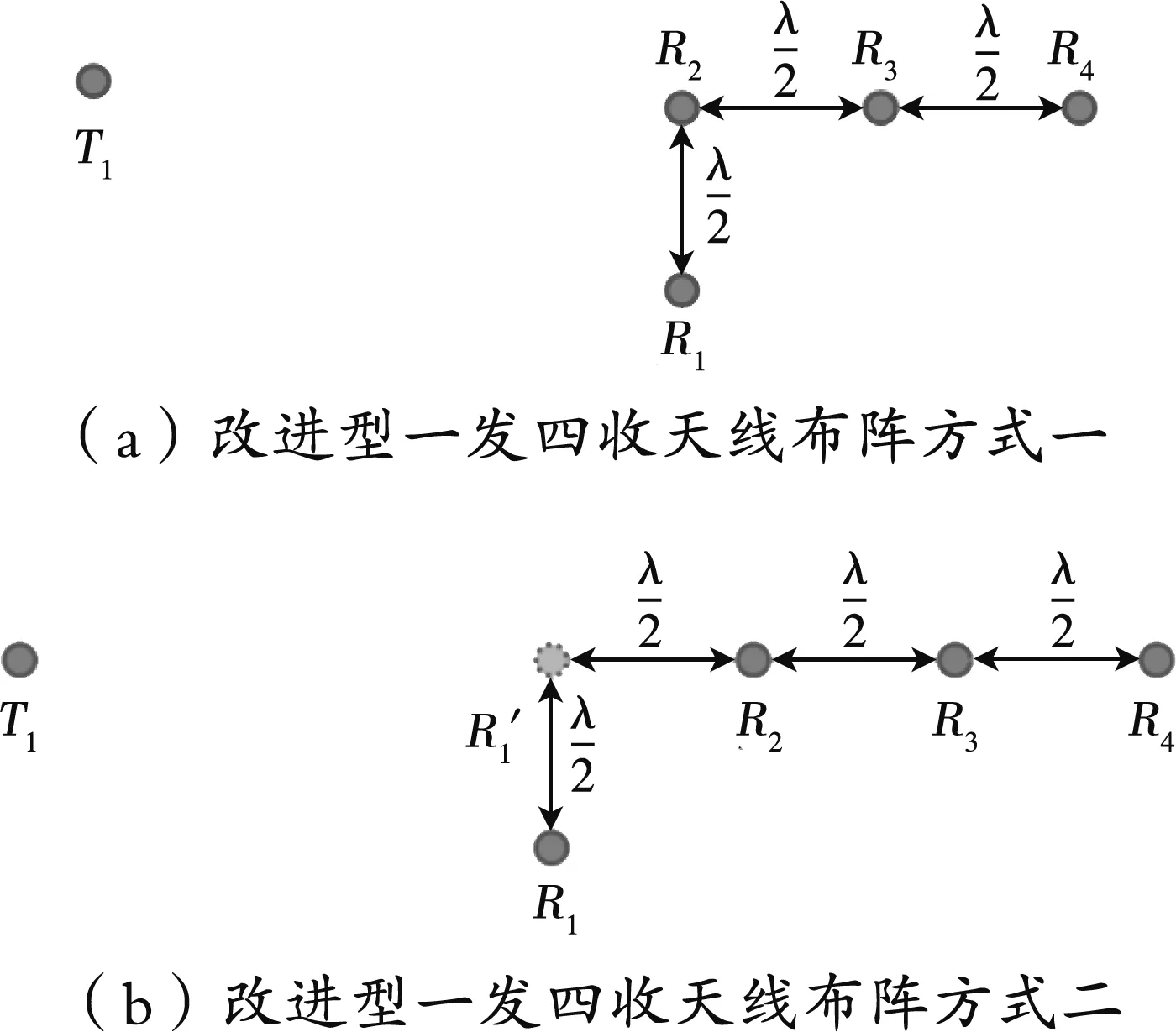
圖2 兩種改進型一發四收天線布陣方式
3.2 改進型兩發四收天線布陣方式
針對改進型一發四收天線布陣方式的缺點提出兩發四收的布陣方式,采用TDM MIMO工作模式(稱為兩發四收TDM MIMO布陣方式),在不犧牲水平方向接收天線數的同時增加雷達測高功能。改進型兩發四收的天線布陣方式如圖3所示。4個接收天線與改進型一發四收天線布陣方式相同,兩個發射天線稀疏布陣,間隔為3/2個波長。該布陣方式只增加了1個發射天線,符合汽車防撞雷達低成本和體積小的要求。
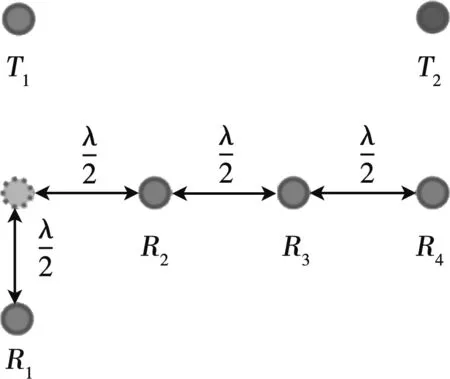
圖3 兩發四收TDM MIMO布陣方式
3.3 模型建立及測高原理
因3.1節中天線布陣方式的信號模型是3.2節中模型的簡化版,所以以兩發四收TDM MIMO天線布陣方式為例進行建模分析。基于鋸齒調頻連續波雷達體制建立回波信號模型。雷達回波信號與發射信號混頻后得到的差頻信號如下式所示:
Sb(t)=Ae-j2πfdt+ω0
(2)
式中,A為差頻信號的幅度;fd為差頻信號頻率;ω0為初始相位。
Sbn(t)=Ae-j2πfdt+ω0+nω
(3)
式中,n=0,1,2,…,7。
因而8個接收天線的相位差分別為[0,ω,2ω,3ω,4ω,5ω,6ω,7ω]。一發八收天線布陣及兩發四收天線工作原理如圖4所示。
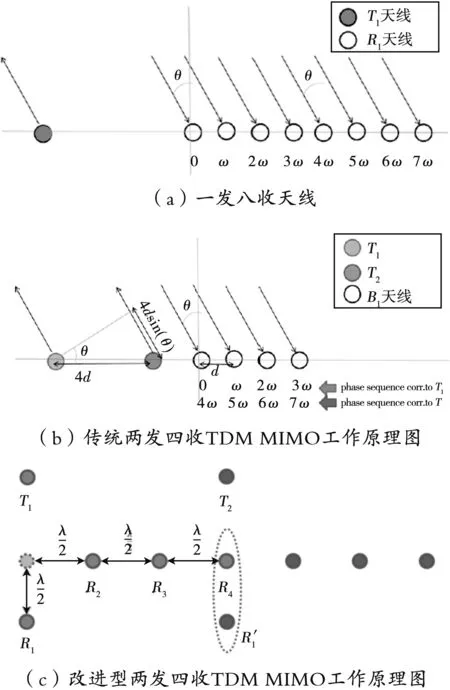
圖4 一發八收天線布陣及兩發四收天線工作原理圖
在MIMO模式下,要得到與一發八收天線體制等效的相位差數組,只須保證Nall=NTx*NRx,其中Nall為一發多收模式下的接收天線數量,NTx和NRx分別為MIMO模式下發射天線和接收天線的數量,因此只需使用兩發四收的MIMO模式即可實現與一發八收相同的功能。本文采用TDM MIMO模式,通過兩個發射天線分時工作的方式等效4個虛擬接收天線,TDM MIMO的工作原理如圖4(b)所示。可以看出,通過TDM MIMO工作模式可以將4個接收天線等效為8個。將TDM MIMO的工作原理和汽車防撞雷達的測高需求結合起來,得到圖3所示的天線布陣方式。圖4(c)同時給出了實際和等效接收天線,標出了用于實現測高功能的兩個接收天線。
該模式的仿真信號模型需要分別考慮水平和俯仰兩個角度維,水平方向6個接收天線的差頻信號為
Sbn(t)=Ae-j2πfdt+φ0+nφ′
(4)
該模式仿真信號的建立與式(3)不同,φ′要包含方位角和俯仰角信息,如下式所示:
(5)
式中,θ為方位角;φ為俯仰角。
據統計,道路上的橋梁、標識牌等目標的高度一般為3.5 m,當這些目標俯仰角為10°時,目標距離約為20 m,即當目標由遠及近至距離為20 m時,其俯仰角從0°變化至10°,在這個時間范圍內需要實現目標方位角和俯仰角的測量。
由式(5)可知目標的方位角和俯仰角是耦合的,而本文所研究的汽車防撞雷達在高度維需要測量的俯仰角范圍很小,且雷達天線垂直方向探測范圍較窄,俯仰角的測量范圍在0°~10°以內,可進一步簡化式(5),得到
(6)
R′1接收天線的差頻信號可表示為
SbR′1(t)=Ae-j2πfdt+φ0+φR′1
(7)
(8)
由式(4)、(6)可知,在該工作模式下,在實際接收天線和虛擬天線結合后,可得到6個水平方向的接收陣元,增加了用于估計方位角的陣元數和天線孔徑大小。垂直方向上可以利用天線R4和R′1實現測高功能。
因汽車防撞雷達在垂直方向僅有兩個天線陣元,受天線陣元數和孔徑的限制,在垂直方向上波束寬度較大,不具備目標分辨的能力,主要用于區分道路上的車輛和有高度的目標,如道路標識牌等。本文結合實際應用場景,采用干涉測角算法實現測高功能。
4 仿真實驗
假設在垂直方向有且僅有一個目標,進行垂直方向測角,仿真場景和仿真結果如圖5所示,其中在垂直方向的測試及實驗均未考慮分辨的影響。圖5(a)給出了汽車防撞雷達的使用場景,其中φ為目標俯仰角,θ為方位角。可以看出,當有高度的目標距離越來越近時,因雷達垂直方向探測范圍較窄,其方位角的測量會越來越困難,所以本文針對有高度的目標,分析了其俯仰角對方位角的影響,并給出了保證準確測量方位角時對目標俯仰角的約束條件。
對雷達天線布陣方式進行改進,本文仿真統計了在0°~20°俯仰角測量范圍內,有高度目標俯仰角對方位角估計導致的誤差,以方位角-10°為例。在同一信噪比下,改進型一發四收天線利用兩個水平基線,采用干涉測角算法,估計出方位角為-10.68°,誤差為0.68°。改進型兩發四收TDM MIMO布陣利用水平方向6個接收天線,采用32點三維FFT算法,估計方位角結果如圖5(b)所示,峰值左右兩個相鄰點分別為(-14.48,94.34)和(-7.181,94.78),進行峰值校準后得到方位角為-10.58°。
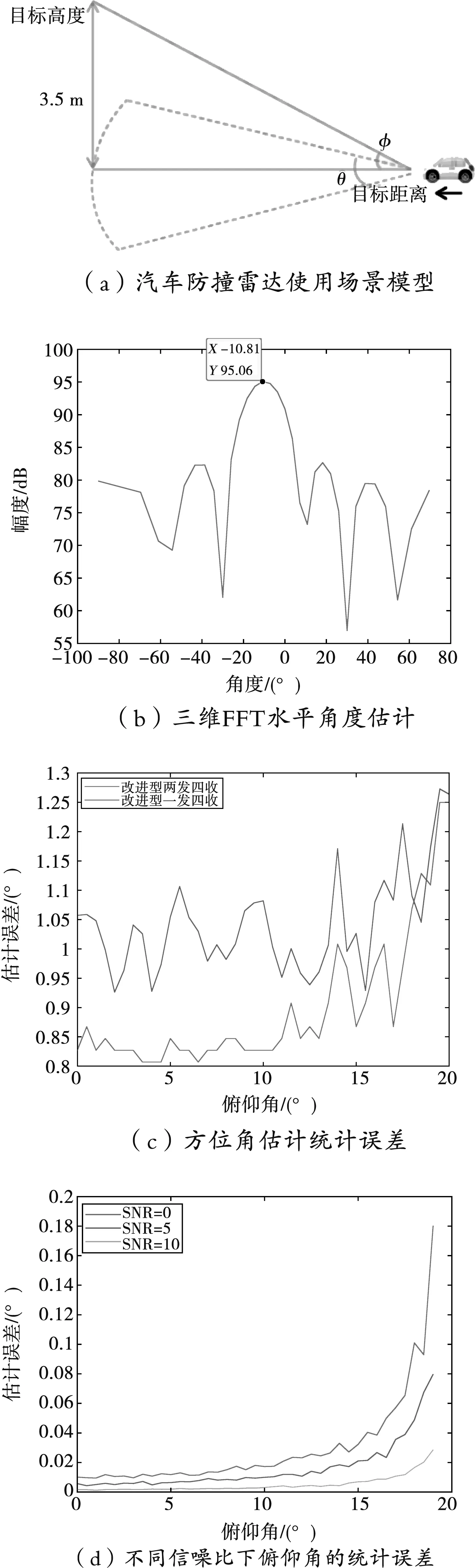
圖5 汽車防撞雷達使用場景及仿真結果分析圖
由圖5(c)可知,隨著目標距離越來越近,俯仰角越來越大,兩種改進后的布陣方式對方位角的估計誤差波動均逐漸變大,準確率會下降,所以應該在目標俯仰角10°以內完成目標空間角度估計,確定是否需要防撞報警。在同一信噪比下,對比兩種改進型天線布陣方式對方位角的估計誤差可以發現,改進型兩發四收方式的誤差更小,且穩定性更好。
圖5(d)給出了信噪比分別為0 dB、5 dB和10 dB時俯仰角的估計誤差。可以看出:在同一信噪比下,目標俯仰角越小,誤差越小,符合建立的信號數學模型;信噪比越高,目標的俯仰角度估計越準確,估計誤差越小。在低信噪比下,雖然估計誤差變大,但仍可以在誤差允許范圍內確定目標為有高度的目標,從而降低虛警概率。
5 結束語
本文提出的具有測高功能的汽車防撞雷達天線布陣方式解決了傳統汽車防撞雷達無法測高的問題,通過仿真實驗證明了其有效性:改進型一發四收天線布陣方式犧牲了用于估計方位角的接收天線數量來實現測高功能,所以方位角精度下降,但這種布陣方式對雷達信號處理算法改動最小,且不會增加算法復雜度;改進型兩發四收TDM MIMO天線布陣方式通過犧牲時間,增加了一倍的接收天線數量,在實現測高功能的基礎上進一步提高了目標方位角估計精度。可根據實際需求選擇使用這兩種具有測高功能的天線布陣方式。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車與安全(2019年9期)2019-11-22 09:48:03
中國生殖健康(2019年3期)2019-02-01 06:12:26
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
決策探索(2014年21期)2014-11-25 12:29:50
環球時報(2010-02-11)2010-02-11 13:34:15