臍橙采摘機器人末端執行器設計與試驗
2022-08-25 09:03:04胡利軍
現代農機 2022年4期
胡利軍
(江西環境工程職業學院,341000,江西贛州)
臍橙作為一種廣受公眾喜愛的水果,具有豐富的營養價值,不僅可以食用,同時還可以藥用,因此近些年來種植面積不斷擴大。隨著臍橙種植面積與產量的不斷增加,如何更好地對臍橙進行無損采摘、提高臍橙采摘機器人的智能化與自動化程度是該領域的重難點問題。在采摘機器人中,末端執行器是其重要組成部分,提高其工作效率有利于提升采摘機器人的工作速度與采摘成功率。鑒于臍橙具有較為特殊的生長特性與生物特性,因此本研究基于其獨特性質與相關理論創新性提出一種新型采摘機器人末端執行器,具體工作流程圖如圖1 所示。

圖1 臍橙采摘機器人末端執行器工作流程圖
1 臍橙采摘機器人末端執行器的構成與技術原理
1.1 末端執行器的機構組成
本研究中所提出的新型末端執行器主要由三大機構構成,分別為吸附機構、夾持機構與旋切機構,核心部分為夾持機構。其中吸附機構主要包括真空吸盤、下氣缸與吸盤支座等組成部分;旋切機構主要包括鋸齒圓盤切刀、上氣缸、切刀連接架、切刀護罩、強磁高速直流電機等組成部分。在末端執行器的作業過程中,如果其手指部分的自由度相對較高,抓取動作的靈活度就會隨之提升,從而體現出更為優良的抓取效果;但由于末端執行器的系統較為復雜,因此在提高其性能的同時控制難度與經濟成本都有所提升。基于此,本研究以前驅動原理為基礎,對夾持機構進行反復實驗,最終確定應用兩指式夾持機構,并且應用一個電機作為動力的主要提供源。
具體而言,夾持機構主要包括V 型手指、利用硅膠作為主要原材料的緩沖材料、壓力傳感器、步進電機、梅花聯軸器、滾珠絲杠機構、螺母座、連桿、導向軸等組成部分。其中壓力傳感器為電阻式,量程為10 kg,精度為5%~25%;步進電機啟動后可為整個系統提供動力,步距角為1.8°;梅花聯軸器可將電機軸與滾珠絲杠有效連接,為BF 系列;滾珠絲杠機構可將轉矩有效轉換為推力;連桿可將手指底座與螺母座有效連接,其中螺母座的安裝位置為絲杠螺母處。
1.2 工作技術原理
在臍橙機器人采摘作業過程中,其主要通過視覺系統獲得目標果實的具體位置并對果梗位置加以分析,與此同時利用機械臂對果實的具體位置加以調節,在完成準確定位后末端執行器進行作業。在工作過程中,為了有效避免因其他果實對目標果實所造成的干擾影響以及末端執行器在工作過程中對其他果實的傷害,機械臂會自主完成避障操作并規劃設定較為清晰的軌跡,而末端執行器會將目標果實與其他果實分離開來。
本研究所研發的末端執行器以上述內容為基礎,應用下氣缸將作為吸附機構的真空吸盤推動至目標果實附近并開始吸附果實,在實施下氣缸推桿復位操作后,在真空吸盤的吸附下目標臍橙果實可被拽出,此時的果梗位于采摘機器人V 型手指的中心平面。在這一環節后,末端執行器的夾持機構會開始作業,其內部的步進電機驅動滾珠絲杠帶動螺母座(滑塊)向前移動,由此可促進拉桿向前移動,從而拉動V 型手指對果實進行包絡夾持,當手指表面的電阻式薄膜壓力傳感器所受正壓力達到設定的安全閾值之后,步進電機停止轉動同時吸盤關閉。在這一環節后,旋切機構開始發揮作用,其內部的上氣缸推桿會作用于處于高速旋轉狀態下的切刀,利用切刀完成旋切果梗操作,從而將目標臍橙果實與果梗相分離。在確定二者相分離后,上氣缸推桿會自主完成復位操作,此時控制切刀的強磁高速直流電機也會停止運行。最后,在末端執行器機械臂的帶動下,目標臍橙果實會被夾持機構運送至果實收集區域。
2 臍橙果實的數學模型與采摘手指工作空間
據相關贛南臍橙標準數據可知,臍橙可根據大小的不同分為不同的等級,其中頗受公眾喜愛的三級臍橙果與特級臍橙果橫徑為>60~<95 mm;但是據相關實際調研可知,部分臍橙果實的橫徑與上述等級要求不符,因此被歸屬于畸形果。在實際臍橙產區中屬于畸形果的數量相對較少,因此本研究將臍橙果實的橫徑范圍設置為>50~<100 mm,橫徑超出上述范圍的臍橙果實不在本研究的研發考慮范圍內。
在研發過程中以上述臍橙果實的橫徑范圍為主要指標構建數學模型,利用CAD 建模的方法對末端執行器的采摘手指空間加以明確,通過不斷的模擬與優化形成較為優良的手指相關參數,采摘手指工作空間具體理想參數為:遠指指節長度l1為35 mm,近指指節長度l2為35 mm,二者的夾角為140°,手指底座長度l4為31 mm,連桿長度l5為60 mm。
為了實現對臍橙果實的有效夾持與穩定夾持,本研究在研發過程中應用最新式曲柄滑塊機構作為關鍵性傳動機構。除此之外,本研究通過大量實驗證實,在轉動角為0°~20°內時,正壓力的設計若為理想狀態,則可利用V 型手指對臍橙果實進行準確且穩定的夾持。
3 臍橙采摘機器人末端執行器的控制系統設計
3.1 控制系統組成
本研究所提出的末端執行器控制系統的主要組成部分有:嵌入式運動控制器、電磁閥、I/O 端子板、模擬量轉換模塊、24 V 電磁繼電器、脈沖發生器、5 V 電磁繼電器、步進電機驅動器、真空器、光電傳感器等。所包含的固態24 V 電磁繼電器共有4 部分,其中:固態24 V 電磁繼電器1 作用于電磁閥1,并有效控制真空器和吸盤;固態24 V 電磁繼電器2 作用于電磁閥2,并有效控制上氣缸;固態24 V 電磁繼電器3 作用于電磁閥3,并有效控制下氣缸;固態24 V 電磁繼電器4 作用于直流強磁高速電機,并有效控制切刀。具體而言,在完成控制系統設計時,應用嵌入式運動控制器作為系統的主控制器可以有效實現對末端執行器的控制與實時計算,并且還可以有效達成主控制器對機械臂控制系統的有機集成,對后續的機器人其他方面的研發與整體開發具有基礎優勢。具體控制系統硬件原理如圖2 所示。
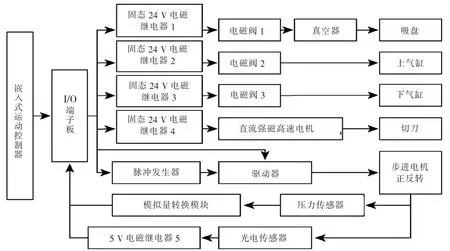
圖2 臍橙采摘機器人末端執行器控制系統硬件原理圖
上述控制系統的主要工作原理如下。
吸附果實:首先,嵌入式運動控制器即主控制器應用I/O 輸出低電平對固態24 V 電磁繼電器3 進行有效控制,使其保持吸合狀態,此時會使電磁閥3 通電并處于工作狀態,由此可推出下氣缸推桿;其次,有效控制固態24 V 電磁繼電器1 保持通電吸合,此時會使電磁閥1 保持通電工作狀態,從而使真空器開始形成負壓,同時由控制系統通過延時保證可以有效吸附果實,并始終保持穩定狀態;最后,固態24 V 電磁繼電器3斷電停止工作,導致下氣缸推桿停止工作和復位,完成整個吸附工作流程。
夾持果實:在吸附果實完成后,控制系統會自動進入夾持流程。主控制器在完成夾持動作時I/O 端口會通過脈沖發生器控制步進電機的啟動,從而使得步進電機處于正轉狀態,與此同時,負責夾持果實的微型手指會通過壓力傳感器對電壓進行反饋,當電壓不斷升高時,其與主控制器所設定的安全閾值會進行對比分析。當壓力傳感器所反饋的電壓值已經高于安全閾值時,脈沖發生器會停止脈沖信號的輸出工作。這時主控制器會控制固態24 V 電磁繼電器1 斷電停止工作并關閉真空器。
旋切流程:主控制器在開始旋切動作時會控制固態24 V 電磁繼電器4 開始工作,通過吸合作用控制強磁高速直流電機以固定的轉速高速旋切果梗。在旋切過程中,控制系統會通過延時確保旋切過程的順利完成。在提示旋切結束后,主控制器會將固態24 V 電磁繼電器4 斷電,從而使得電機斷電停止工作。
3.2 正壓力閾值與氣缸速度確定
本研究所提出的末端執行器應用電阻式薄膜壓力傳感器,通過該裝置對壓力進行調節控制,從而實現輸出電壓的變化調節。
據相關理論可知,如果進一步提升氣缸推桿的運行速度可以進一步縮短采摘機器人的吸附動作與旋切動作的合并應用時間,因此本研究在研發過程中希望提高氣缸推桿速度。但在研發實驗中發現:當下氣缸的推桿速度較快時,吸盤會因速度過快而與果實產生撞擊,導致無法與臍橙果實充分接觸,并且由于推桿的復位速度相對較快,使得臍橙果實存在掉落的可能,導致臍橙果實吸附失敗的幾率大大提升;當上氣缸的推桿速度較快時,本就處于高速狀態的切刀在作業時一定程度上會將果梗嚴重頂斜。
以提高末端執行器的運行速度與避免上述運行問題為研發目的,本研究所研發的末端執行器將下氣缸推桿的速度調整為240 mm/s,并且伸出的速度與復位的速度完全一致,在由氣缸閥門控制的如此推桿速度下,末端執行器具有最優良的臍橙吸附效果。除此之外,為了使得工作效果最佳,將上氣缸推桿的推出速度設置為80 mm/s,復位速度為400 mm/s。
4 臍橙采摘機器人末端執行器的采摘實驗
為了進一步驗證本研究所研發的臍橙采摘機器人末端執行器的實際應用效果,研發人員以某臍橙農業科技園為實驗基地開展實際采摘實驗。實驗過程中,在臍橙采摘機器人的機械臂上安裝本新型末端執行器。在實驗過程中設定臍橙果實的位置已準確定位,將單個臍橙果實的采摘總時間、平均采摘成功率、采摘損傷率作為試驗指標,將步進電機的轉速作為調節因素,其他實際采摘實驗詳細信息如下:
步進電機轉速:200~300 r/min;
臍橙果實樣本要求:果實必須處于成熟狀態,橫徑需大于60 mm、小于95 mm;
橫徑梯度要求:在本次實驗中設置橫徑梯度為5 mm,每個橫徑梯度選擇5 個臍橙樣本,總共選取30個臍橙果實作為樣本對象。
在實驗過程中統計并整理單個臍橙果實的采摘用時、30 個臍橙果實的采摘成功率及損傷率。實驗結果顯示,單個臍橙果實的采摘時間與步進電機轉速有密切關系,二者之間成反比。當步進電機的轉速為最高限值時,單顆臍橙果實的采摘時間最短,可達到1.7 s 以下;步進電機的轉速為250 r/min 時,該末端執行器的采摘成功率達到頂峰,可達到94%以上。與此同時,采摘的果實損傷率與轉速無相關關系,在實驗過程中沒有臍橙果實損傷,因此損傷率為0。
除此之外,本研究結果顯示,在步進電機轉速為250、300 r/min 時,采摘成功率相差2.86%,而單果采摘時間僅相差0.12 s,此時間差對末端執行器整體的采摘速度影響較小。由此可知,為了保證較高的采摘成功率,可將250 r/min 作為步進電機最佳轉速,此時,單果采摘時間為1.76 s,采摘成功率為94.28%。
在實驗結束后對實驗過程中采摘失敗的原因深入剖析可知,末端執行器采摘作業失敗的主要原因為部分臍橙果實的果梗長度相對較短,因此臍橙果實處于吸附狀態時果梗與切刀之間的角度相對較小,由此導致切刀在切果梗時無法徹底切斷,最終造成采摘失敗。
5 結語
眾所周知,臍橙在眾多水果中屬于營養較為豐富且具有較高食用價值與藥用價值的水果之一。贛州市是臍橙的重要種植產地之一,該地區每年的臍橙產量可達幾百萬噸,據贛州市果業局2016 年的研究報告顯示,2016 年當地的臍橙果實年產量已達300 萬t,我國逐漸成為世界范圍內種植面積最大且產量最高的臍橙生產區。與此同時,如何對臍橙進行規模化種植、采摘和處理,是目前臍橙行業的重點研究方向,其中應用臍橙采摘機器人是現階段采摘環節的主要手段。在臍橙采摘機器人中末端執行器是重要組成裝置之一,末端執行器的工作效率對最終臍橙采摘的成功率與工作效率起到重要影響。
綜上所述,為了對現有的臍橙采摘機器人加以改進與優化,提高采摘效率,本研究以臍橙果實的生物特性為基礎,結合前驅動原理,提出一種創新性的臍橙采摘機器人末端執行器,從而更好地實現臍橙無損采摘。該新型末端執行器主要可分為三部分,包括吸附機構、夾持機構、旋切機構。其中吸附機構可以通過作業達到臍橙果實與生長組織的有效區分;末端執行器可以利用夾持機構無損、穩定地夾持目標臍橙果實;旋切機構可以將目標臍橙果實與果梗迅速切開分離。在研發完成后,相關技術人員通過實踐研究,利用該末端執行器的樣機完成30 個臍橙目標果實的采摘,在采摘過程中將步進電機的轉速作為可調節的實驗因素,將單個臍橙果實的采摘時間、總體果實采摘成功率、臍橙果實損傷率作為研究指標加以分析。
研究結果顯示,該末端執行器在步進電機轉速為250 r/min 時具有較好的采摘效果,此時每個臍橙果實的采摘時間為1.76 s,采摘成功率為94.28%,損傷率為0。采摘實驗數據證實,本研究設計的末端執行器具有較為確切的應用價值,不僅機構構成較為簡單,控制系統設計具有較高的可靠性,還可為臍橙采摘機器人的后續整體研發提供技術支持。