微光多譜段成像儀調焦及像移補償機構設計與性能分析
2022-08-23 03:26:58曹業豪賀玉坤單博聞彭越洋辛宏偉陳長征
紅外技術 2022年8期
曹業豪,賀玉坤,單博聞,彭越洋,辛宏偉,陳長征
〈系統與設計〉
微光多譜段成像儀調焦及像移補償機構設計與性能分析
曹業豪1,2,賀玉坤1,2,單博聞1,2,彭越洋1,2,辛宏偉1,陳長征1
(1. 中國科學院長春光學精密機械與物理研究所,吉林 長春 130033;2. 中國科學院大學 北京 100049)
根據某型號微光多譜段成像儀的整機結構特性和工作條件,設計了一種調焦及像移補償一體化的設備,達到節約空間、保證成像質量以及實現低照度環境下成像的目的。其中調焦功能由絲杠螺母配合楔形滑塊實現,像移補償功能由音圈電機實現,且配合有動、靜態兩級鎖緊裝置,使機構的可靠性、抗沖擊性顯著提高。結構外形尺寸為349mm×192mm×174mm,調焦范圍為±2mm,像移補償量為3mm,調焦分辨率為0.05mm,實測的定位精度為±5.7mm。掃頻振動試驗得出其一階模態為225 Hz,與有限元仿真分析結果基本一致,正弦振動試驗和隨機振動試驗結果良好,均在技術指標要求范圍內,說明具有良好的動態剛度,可以有效地避免共振現象的發生。綜上所述,該調焦及像移補償機構具有體積小,結構強度高的特點,可以很好地滿足微光相機的工作條件。
調焦機構;像移補償;有限元分析;振動試驗;精度分析
0 引言
微光空間遙感成像儀具有在低照度環境下成像的能力,在觀測城市夜間燈光、檢測顆粒物污染、研究南北極冰川、探測海洋環境等應用領域有著巨大的經濟價值和科學研究價值[1]。搭載微光成像載荷的衛星平臺在發射過程中,會經歷一系列沖擊、振蕩等嚴苛的動力學環境,使成像儀內的光學系統組件發生少量的位置變化;光學載荷在軌運行工作的狀態下,會由于溫度變化、大氣壓、衛星姿態等空間環境的因素,使光學系統的焦平面發生一定的偏移,即為離焦現象[2-3],若不采取措施補償離焦量,則會形成一個模糊的圖像,嚴重影響成像質量。因此,高精度的空間相機中都會裝有調焦機構來保證感光探測器與像面的重合。
調焦機構是成像儀的核心組件之一,它使得成像儀在應對衛星火箭發射過程中的嚴苛動力學環境時保證焦平面組件不發生過大的偏離,也能保證成像儀在軌工作運行時CMOS感光探測器與像面重合,對最終的成像質量有著至關重要的影響。為了確保微光多譜段成像儀在低照度條件下獲得較為清晰的圖像,系統應具備足夠的弱信號探測能力,因此需要CMOS感光探測器達到一定時長的連續曝光,以實現凝視成像的效果,這就需要成像儀帶有像移補償功能[4]。
本文結合微光多譜段成像儀的工作特性,采用了調整焦平面組件的方式,設計了一種調焦及像移補償機構實現兩種功能的一體化,在保證定位精度和可靠性的同時,使機構設計盡可能緊湊,輕量化程度更高,提高微光成像儀對工作環境的適應能力。
1 調焦機構的指標
1.1 微光多譜段成像儀的光學系統介紹
微光多譜段成像儀的光學系統示意圖如圖1所示,該光學系統為離軸反射式,相比于同軸式光學系統,具有大視場、無遮擋、高分辨率的優勢,還能減小空間相機的尺寸,但由于其非軸對稱的結構,且對反射鏡之間的位置精度要求十分嚴格,給裝調帶來較大難度。光線通過主鏡、次鏡、三鏡后,匯聚在CMOS感光探測器上成像。當衛星平均軌道高度達到505 km時,該光學系統的幅寬可以達到300km,分辨率可達10m。

1.2 像移補償量的確定
微光多譜段成像儀要求在城市夜間燈光、極地月光冰雪探測的條件下成像,為了確保微光多譜段成像儀在低照度(入瞳處亮度范圍覆蓋10-1W/m2×sr~10-4W/m2×sr)的條件下獲得較為清晰的圖像,滿足一定的信噪比要求,需要微光CMOS探測器進行至少200ms的連續曝光,以實現凝視成像的效果。而由于衛星搭載了微光和紅外兩個載荷,無法進行姿態補償,因此采取焦平面平移的方式,補償衛星飛行時形成的像面移動,保證焦平面與像面位置的相對一致。
當衛星軌道的平均高度為505 km,由第一宇宙速度公式計算得衛星相對地心速度為:

式中:sat即為衛星相對于地球的飛行速度;為萬有引力常數;earth為地球質量;earth為地球半徑。
地面目標移動的速度為:

式中:earth即為地面目標相對于衛星的移動速度。
CMOS成像行頻p計算公式為:

式中:¢為后擺角速率;為CMOS探測器像元尺寸,值為11mm;為相機焦距,值為555.5 mm。微光多譜段成像儀在前向移動并成像過程中,姿態角速率保持為0,所以姿態角在理想情況下保持為恒定值,因而¢也為0,行頻隨時間的變化相對很小。計算后得行頻為0.7 kHz。
CMOS探測器的行周期為行頻p的倒數,即為1.415 ms。根據要求,探測器需要進行至少200 ms的連續曝光,因此,像移補償量的最少為:
為了留出有一定的裕度,最終設定的像移補償量為3mm。
1.3 調焦機構的綜合指標確定
光學成像系統都具有一定的允許離焦量,如果焦平面的偏移量在這個范圍內則成像質量不會下降,其最大允許的離焦量即為光學系統的半倍焦深:
式中:為半倍焦深;為成像儀的中心工作波長;為光學系統的F數,即相對孔徑的倒數;經過計算后得出為±45mm,根據以往工程經驗,調焦機構的精度應小于四分之一個半倍焦深,即為±11.25mm,考慮到微光多譜段成像工作的復雜環境,最終將定位精度指標設置為±10mm以內,調焦分辨率設置為2mm以內。通過對離焦因素的分析,最大離焦量約為±1mm,考慮到需留有一定的安全裕度,將最大調焦量設定為±2mm。根據衛星總體提供的外界擾動頻率,調焦及像移補償機構的一階自然頻率應大于100Hz。
2 調焦及像移補償機構設計
調焦及像移補償機構如圖2所示,其外形尺寸為349mm×192mm×174 mm,總質量為9.8kg(不包括兩側的動態鎖緊機構)。

圖2 調焦及像移補償機構
2.1 傳動原理的設計
調焦的傳動方式按照結構分類,十分多樣化,常用的有螺旋機構和凸輪機構[5-6]。螺旋絲杠機構結構簡單,占用空間小,加工難度低,傳動鏈短,但抗沖擊能力差。凸輪機構通常配合齒輪傳件使用,如蝸輪蝸桿機構,能起到穩定的減速作用,易于防冷焊處理,但是難于加工,組件之間為點、線接觸,易磨損。
在調試閉環控制曲線的過程中,螺旋絲杠的旋轉角度和焦平面組件的理論位移關系是線性的,而凸輪機構則是非線性的,容易造成焦平面組件的定位誤差。綜合分析了微光多譜段成像儀的工作環境和整機結構,最終選擇了絲杠螺母運動副配合楔形滑塊導軌的傳動方式。
絲杠螺母的自鎖性[7],主要取決于機構的導程角和當量摩擦角,若導程角小于當量摩擦角,則具有自鎖性,導程角和當量摩擦角的計算公式為:


式中:為導程角;為當量摩擦角;為絲杠螺母的導程;2為絲杠的中徑;為絲杠螺母的摩擦系數;為螺紋的牙型角。該絲杠螺母設計成導程為2mm,絲杠中徑為15mm的梯形螺紋,牙型角為30°,根據使用材料的特性,絲杠螺母的摩擦系數為0.09,將數值帶入公式得導程角=2.43°,當量摩擦角=5.32°,<,說明絲杠螺母的自鎖性良好。
像移補償功能采用音圈電機作為驅動元件,相比于壓電陶瓷電機,音圈電機具有體積小、行程長等優勢,其位移分辨率理論上取決于測量機構的精度。壓電陶瓷的缺點在于其行程較短,一般只有幾微米,通常采用疊加壓電陶瓷片的形式提高行程。如果該像移補償結構采取壓電陶瓷電機的方案則需要設置位移放大機構,這樣就會提高結構的復雜程度,不利于輕量化設計。因此采用三臺音圈電機并排排布的方式帶動焦平面組件直線運動,實現像移補償功能。
調焦及像移補償機構的原理如圖3所示。該結構的調焦部分由步進電機、絲杠螺母運動副、光電編碼器、楔形滑塊導軌以及焦平面組件構成,像移補償部分由音圈電機、直線位移傳感器以及直線導軌組成,兩者的運動相互獨立,互不干擾。
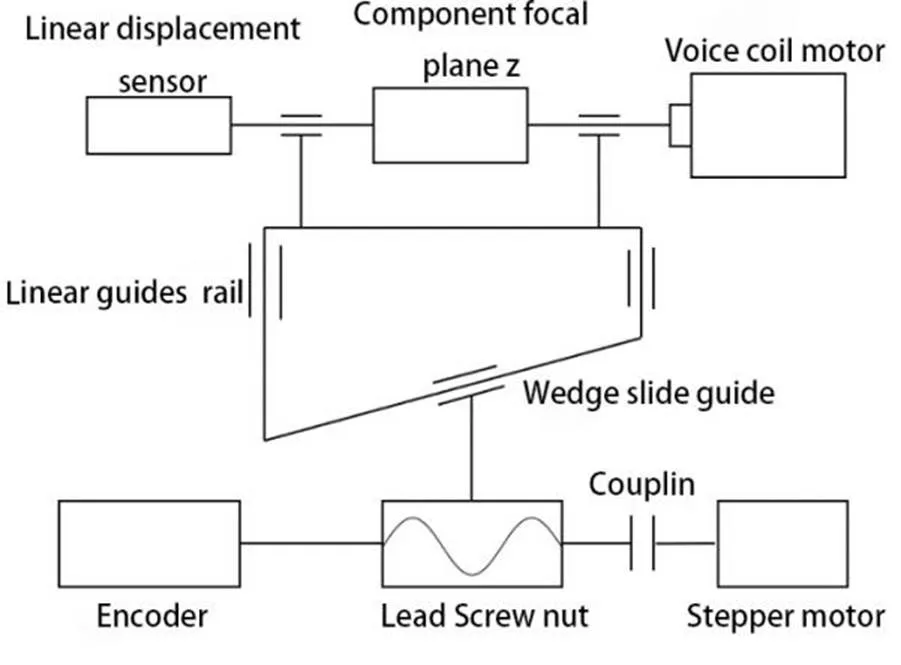
圖3 調焦及像移補償機構傳動原理
2.2 動態鎖緊機構
為了彌補絲杠螺母的抗沖擊能力的不足,提高機構的可靠性,設計了一種動態鎖緊機構,其原理如圖4所示,可以將其功能理解為一種拔銷器。解鎖機構將形狀記憶合金(shape memory alloys,SMA)作為驅動元件,加工成橢圓環狀,將其一端固定在鎖緊機構的支撐件上,另一端固定在一個錐銷上,錐銷的另一端插入焦平面組件的支撐架中,此時焦平面組件的位置被固定,這種狀態一直持續到微光多譜段成像儀在軌運行工作前。當衛星完成發射階段進入空間軌道后,啟動加熱程序,在記憶合金環兩側分別設置一組加熱片,加熱片通電后會給記憶合金環加熱,觸發其形狀記憶效應將銷拔出,焦平面組件便可以正常移動。

圖4 動態鎖緊機構示意圖
2.3 靜態鎖緊機構
微光多譜段成像儀的像移補償功能主要是用在微光條件下,實現凝視成像的效果,當像移補償不啟動的時候,需要保證焦平面組件在該方向上的穩定,因此在音圈電機的運動方向設置一個靜態鎖緊機構,起到自鎖的功能,其結構示意圖如圖5所示。

圖5 靜態鎖緊機構示意圖
音圈電機不工作的時候,靜態鎖緊裝置如左邊的狀態,由兩個滾珠在彈簧的作用下卡住固定桿,防止焦平面組件的移動,當啟動像移補償功能,音圈電機驅動焦平面組件克服滾珠和推桿之間的摩擦力,移動到右圖所示的位置,再開始進行像移補償運動。
3 調焦功能的理論精度
定位精度是衡量精密儀器質量的核心重要指標之一,誤差分析可以從理論上預測調焦機構的精度是否符合微光多譜段成像儀的成像質量要求和各項技術指標,是設計調焦機構中必不可少的步驟。
3.1 調焦功能的分辨率
調焦機構的分辨率,即為步進電機每轉動一個步進角焦平面組件所移動的距離,也是調焦的最小單位,其計算公式為:
式中:為步進電機的步進角,其值為1.8°;為絲杠螺母的導程;為電機減速裝置的減速比,其值為50;為楔形滑塊導軌的斜角,其值為15°。
3.2 調焦機構的定位誤差
絲杠螺母的梯形螺紋嚙合處存在縫隙,其齒形之間也存在著一定的加工精度誤差、絲杠中心距的竄動誤差。當電機轉動一段距離后,開始反向轉動的時候,上述因素使螺母不能隨之立刻反向運動,這種空回現象會導致定位精度的降低。絲杠在安裝過程中也會存在實際位置與理論位置發生偏移的狀況。因此引入由絲杠螺母造成的焦平面組件定位誤差1=4mm。
考慮到裝調時的環境和人為因素,可能會對導軌、絲杠螺母的安裝造成一定的偏差,引入由裝調造成的定位誤差2=3mm。
通過查閱產品手冊可知,步進電機的誤差最大約為步進角的3%,即0.054°,通過減速器折合到焦平面組件的直線運動上后數值很小,對精度基本沒有影響。所選用的14位光電編碼器的靜態誤差最大為0.1°,由此造成的焦平面位置誤差為:

編寫閉環控制程序時,為了防止由于慣性等因素,使焦平面反復運動,會設定一個控制閾值,若編碼器碼值在這個范圍內,則視為焦平面組件到達了正確位置,因此引入控制誤差4=0.98mm。
調焦功能的綜合定位誤差為:

4 有限元分析
為了研究調焦機構的動力學特性,利用Hypermesh軟件對調焦及像移補償機構進行有限元模型的建立,其中,動態鎖緊機構插入焦平面組件中的錐銷采用梁單元模擬其鎖緊效果;由于編碼器,步進電機,解鎖機構并不是動力學仿真中研究的重點,因此用質量點代替;CMOS探測器組件數量多,體積小,分布復雜,除了焦平面組件的支撐框架外,其余也都采用質量點代替,與相應的支撐結構件之間使用MPC(multi-pointconstraints)連接。最終建立的有限元模型如圖6所示,該模型共包含2036149個3D單元,512934個節點。
模態仿真分析[9]是一種用于確定結構的固有頻率和振型的方法,在設計需要承受動態載荷的結構時,其固有頻率和振型是需要考慮的重要因素。結構件的模態越高,說明其抗振能力越強,動態剛度越高。調焦及像移補償機構的前四階模態分析結果如表1所示,相應的振型云圖如圖7所示。

表1 調焦機構的前四階模態
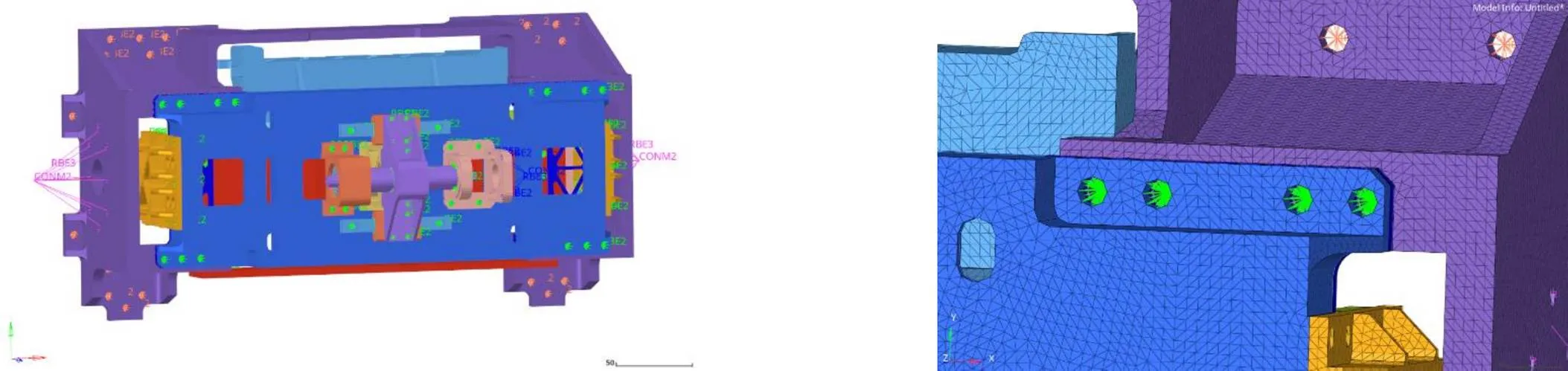
圖6 調焦及像移補償機構有限元模型

圖7 模態分析的振型圖
從結果中可以看出,調焦及像移補償機構的一階基頻顯著高于要求的100Hz,具有良好的抗振能力和動態剛度。根據一階模態的振型圖可以看出,晃動最強烈的部分為焦平面組件的前端,因此在接下來的振動試驗中應該重點關注該位置。
5 定位精度檢測
采用閉環控制的方式對調焦功能的定位精度進行檢測[10]。本次試驗中,使用下位機控制焦平面組件的運動,利用數顯千分尺記錄36個測量點的焦平面實際位置,并整理出每個目標點與上一個目標點位置的差值,對位移變化情況進行統計,處理數據后的位移變化量的殘差如圖8所示。

圖8 閉環控制位移變化量的殘差
位移變化量的標準差為:
式中:V為開環控制位移變化量的殘差,根據格拉布斯判別式[11]:

式中:為樣本數量,為35;顯著度取值為0.05;查表得臨界值0(,)為2.81,判別后知測量數據中沒有粗大誤差的存在。根據“3”原則,則調焦功能的閉環定位精度為:
=±3=±5.7mm (13)
該測試結果滿足了±10mm的技術指標,與理論的定位誤差較為接近。
6 振動試驗
為了檢驗調焦及像移補償機構抵御衛星發射時產生的沖擊、振蕩的能力,了解其動力學特性[12],需要對其進行動力學振動試驗(動態鎖緊機構用質量塊代替)。
6.1 掃頻振動試驗
掃頻振動試驗的目的是檢測機構在正弦激勵載荷的作用下,關鍵點位置的加速度響應值,來確定機構的自然頻率。對機構的三個方向進行0.5的掃頻振動試驗,加速度頻率響應曲線如圖9所示,3個方向的模態分別為240Hz、225Hz、243Hz,對比第4章中的有限元模態仿真結果,根據相應的振型,掃頻振動試驗結果與仿真結果分別相差了5.8%,2.5%,9.5%,誤差在可接受范圍內,上述結果均顯著高于衛星總體要求的100Hz,說明調焦及像移補償機構可以很好地避免與微光多譜段成像儀發生共振。
6.2 正弦振動試驗
正弦振動試驗與掃頻振動試驗原理相同,區別在于正弦振動試驗的頻域范圍小、振幅高,主要針對低頻段。其中響應最大的是方向上,100Hz處,焦平面組件的支撐結構上的測量點,此時的激勵振幅為3.9,響應振幅為4.25,放大倍率為1.09倍,如圖10所示。

6.3 隨機振動試驗
隨機振動試驗是用來檢測結構件是否會發生變形、損壞的常用方法之一,輸入的激勵載荷一般為功率譜密度(power spectral density)的形式,計算的結果為功率譜密度與頻率的曲線,曲線下的面積即加速度總均方根(grms),通過對比輸入和輸出的加速度總均方根值得到放大倍率,以此來衡量結構的抗振性能。本次試驗的頻域為20~2000Hz,加速度RMS為6.52,其中放大倍率最大處發生在方向上,響應的加速度RMS為22.11,放大倍率為3.39倍,試驗曲線如圖11所示。符合衛星總體提出的小于5倍技術指標,證明機構的抗振能力良好。
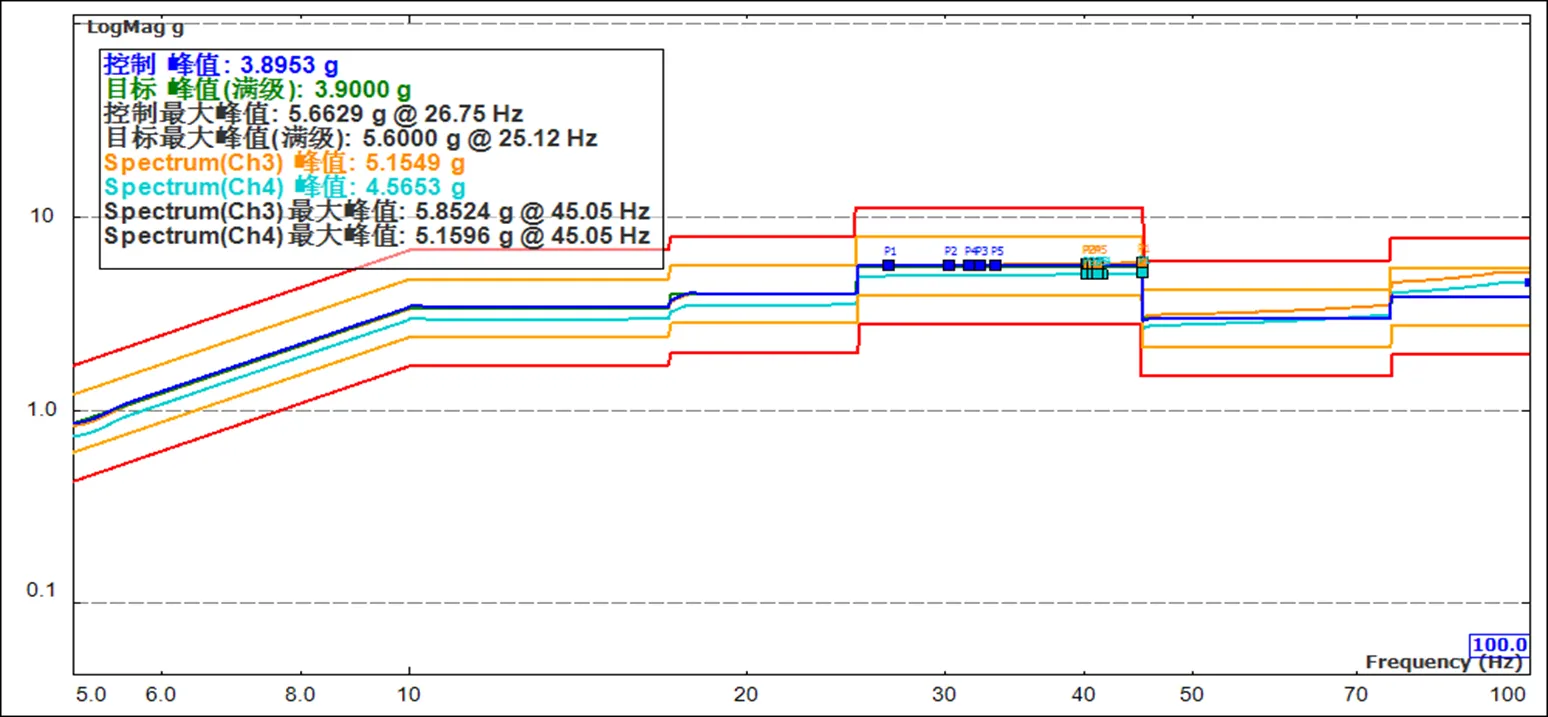
圖10 Z方向掃頻振動試驗加速度響應曲線

圖11 Y方向隨機振動試驗功率譜密度響應曲線
6.4 試驗后的鎖緊能力檢測
在每一個方向的振動試驗前后,對調焦機構的編碼器碼值進行記錄和對比,來驗證其鎖緊效果,記錄結果如表2所示。可以看出試驗前后碼值變化量很小,最大變化量折合成約等于6¢,同時考慮到光電編碼器的靜態誤差因素,可能會存在一定量碼值的偏移,因此可以認為焦平面組件未發生位移,調焦機構的鎖緊效果良好。

表2 振動試驗前后碼值對比
7 總結
本文針對微光多譜段成像儀的整機結構特性和工作條件,設計了一種調焦及像移補償一體化的設備,該設備的最大優勢在于,將兩種功能結合在一起,在保證達到所需技術指標的前提下,使整體所需要的空間最小化,結構最簡單化,且配合有動、靜態兩級鎖緊裝置,使機構的可靠性、抗沖擊性顯著提高。結構外形尺寸為349mm×192mm×174mm,總質量為9.8kg(不包括兩側的動態鎖緊機構)。其最大像移補償量為3mm,最大調焦量為±2mm,調焦分辨率為0.05mm,實測的定位精度為±5.7mm。通過掃頻振動試驗得出其一階模態為225Hz,與有限元仿真分析結果基本一致,顯著高于設計指標的100Hz。正弦振動試驗中曲線跟隨狀況良好,最大放大為1.09倍,隨機振動試驗的加速度RMS最大放大為3.39倍,均在技術指標的要求范圍內,表明該機構可以適應衛星發射過程中的嚴苛動力學環境,可以有效地避免機構因發生共振而受到破壞。振動試驗前后對編碼器碼值的對比,說明了調焦機構具備了良好的自鎖能力。綜上所述,該調焦機構可以很好地滿足微光多譜段成像儀的工作需求。
[1] 張元濤. 空間高靈敏度大動態范圍微光成像技術研究[D]. 上海: 中國科學院大學(中國科學院上海技術物理研究所), 2018.
ZHANG Yuantao. Research on Low-light Level Imaging Technology with High Sensitivity and Large Dynamic Range[D]. Shanghai: University of Chinese Academy of Sciences (Shanghai Institute of Technical Physics, Chinese Academy of Sciences), 2018.
[2] Hong Dae Gi, Hwang Jai Hyuk. Fabrication and performance test of small satellite camera with focus mechanism[J]., 2019, 13(4): 26-36.
[3] 楊永斌. 空間光學相機調焦技術研究[J]. 航天器工程, 2011, 20(2): 20-24.
YANG Yongbin. Study on focusing technology of space optical camera[J]., 2011, 20(2): 20-24.
[4] 李永昌, 金龍旭, 李國寧, 等. 寬視場遙感相機像移速度模型及補償策略[J]. 武漢大學學報: 信息科學版, 2018, 43(8): 1278-1286.
LI Yongchang, JIN Longxu, LI Guoning, et al. Image shift velocity model and compensation strategy of wide-field remote sensing camera[J]., 2018, 43(8): 1278-1286.
[5] 姜紫慶, 賈建軍. 空間相機透鏡調焦機構的設計與測試[J]. 光學精密工程, 2018, 26(12): 2956-2962.
JIANG Ziqing, JIA Jianjun. Design and test of lens focusing mechanism for space camera [J]., 2018, 26(12): 2956-2962.
[6] 柴方茂, 樊延超, 辛宏偉, 等. 焦面二維精密調整機構研究[J]. 光電工程, 2014, 41(1): 6-11.
CHAI Fangmao, FAN Yanchao, XIN Hongwei, et al. Research on two-dimensional precision adjustment mechanism of focal plane[J]., 2014, 41(1): 6-11.
[7] 唐金松. 簡明機械設計手冊: 3版[M]. 上海: 上海科學技術出版社, 2009.
TANG Jinsong.: 3rd Edition[M]. Shanghai: Shanghai Scientific and Technical Publishers, 2009.
[8] 張洪偉, 徐鈺蕾, 李全超, 等. 輕型雙波段航空相機調焦機構的設計[J]. 激光與光電子學進展, 2016, 53(8): 252-258.
ZHANG Hongwei, XU Yulei, LI Quanchao, et al. Design of focusing mechanism for lightweight dual-band aerial camera[J]., 2016, 53(8): 252-258.
[9] 辛宏偉. 小型輕質長條反射鏡撓性支撐方案研究[J]. 光機電信息, 2010, 27(7): 51-55.
XIN Hongwei. Study on flexible support scheme of small lightweight strip mirror [J]., 2010, 27(7): 51-55.
[10] 許志濤, 劉金國, 龍科慧, 等. 高分辨率空間相機調焦機構精度分析[J]. 光學學報, 2013(7): 284-289.
XU Zhitao, LIU Jinguo, LONG Kehui, et al. Precision analysis of focusing mechanism of high resolution space camera[J]., 2013(7): 284-289.
[11] 劉建, 劉文金. 應用格羅布斯準則判定測量結果中的粗大誤差[J]. 木工機床, 2006(2): 26-27.
LIU Jian, LIU Wenjin. Application of grobs criterion to determine the gross error in measurement results[J]., 2006(2): 26-27.
[12] 袁健, 沙巍, 陳長征, 等. 空間相機桁架式支撐結構的集成優化設計[J]. 紅外與激光工程, 2015, 44(12): 3661-3666.
YUAN Jian, SHA Wei, CHEN Changzheng, et al. Integrated optimization design of truss support structure for space camera[J]., 2015, 44(12): 3661-3666.
Design and Performance Analysis of Focusing and Image Motion Compensation Mechanism for Low Light Level Multispectral Imager
CAO Yehao1,2,HE Yukun1,2,SHAN Bowen1,2,PENG Yueyang1,2,XIN Hongwei1,CHEN Changzheng1
(1.,,,130033,;2.,100049,)
According to the structural characteristics and working conditions of a low light level multispectral imager, an integrated device of focusing and image motion compensation is designed to be smaller, better imaging quality and low illumination imaging. The focusing function is realized by the screw nut and the wedge slider. The realization of the motion compensation function depends on the voice coil motor, and with the dynamic and static two-stage locking device. The reliability and impact resistance of the mechanism are significantly improved. The overall dimension of the structure is 349mm×192mm×174mm, the focusing range is ±2mm, the image motion compensation is 3mm, the focusing resolution is 0.05mm, and the actual positioning accuracy is ±5.7mm.The first order mode is 225Hz, which is consistent with the result of finite element simulation. The results of the sine vibration test and random vibration test meet the requirements of the technical indicators. It shows that it has good dynamic stiffness and can effectively avoid the resonance phenomenon. The focusing and image motion compensation mechanism has small size and high structural strength, which meet the working conditions of low light level cameras.
focusing mechanism, image motion compensation, finite element analysis, vibration test, Accuracy analysis
TH122;V443+.5
A
1001-8891(2022)08-0837-09
2021-04-21;
2021-06-21.
曹業豪(1998-),男,浙江省金華人,碩士研究生,主要研究方向為空間光學遙感器結構設計。
陳長征(1976-),男,山東省寧津人,研究員,工學博士,主要研究方向為空間光學遙感器總體設計。E-mail:chencz@ciomp.ac.cn。
國家自然科學基金(11803036)資助項目。
