橋式起重機多維度姿態控制關鍵技術設計思路
2022-08-19 08:06:14聶福全NIEFuquan
建筑機械化
2022年8期
聶福全/NIE Fu-quan
(河南衛華重型機械股份有限公司,河南 新鄉 453400)
1 問題提出
在核工業、航空航天等作業場所,橋式起重機需要在復雜、定位精度高的環境內運行,特別是當吊裝的產品形狀不規則時,就需要多名輔助人員通過繩子牽引方式來保持產品的轉運姿態,這樣不僅效率低下,而且輔助人員在復雜的環境內工作也會面臨較大的危險。因此,對吊運姿態可控方法進行研究,滿足吊裝產品時橋式起重機能夠自行控制重物姿態,以減少操作人員、提升吊運效率、降低操作人員的危險性,就顯得非常必要。
2 橋式起重機姿態控制方式
通過分析,結合實際使用工況,姿態控制主要包括升降不漂移(垂直方向姿態)、吊鉤與吊具匹配(旋轉角度姿態及復合姿態)、防搖擺控制(水平方向姿態)等,如圖1 所示,達到提高不規則物體的吊裝效率的目的。
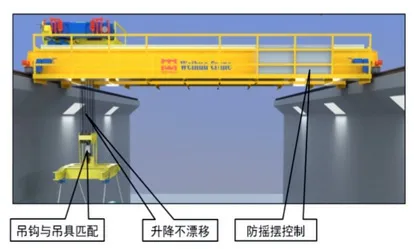
圖1 橋式起重機多維姿態控制示意圖
3 姿態控制具體方案設計
根據前述分析,升降不飄移可以采用起升機構對稱布置結構和合理的鋼絲繩纏繞方式進行解決;通過在大車、小車、起升機構采用電氣防搖擺技術,實現橋式起重機各直線移動姿態可控;通過設計專用吊具,使得吊具位置可控,確保吊具與整機動作保持一致。
3.1 主要技術參數
該機主要由小車、自動吊具、大車運行機構、橋架、電氣控制系統等部件組成。整體結構設計如圖2 所示,試制樣機主要技術參數如下。
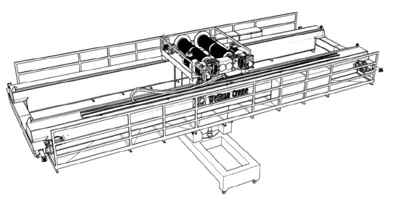
圖2 橋式起重機三維結構示意圖

3.2 吊鉤升降不漂移技術
3.2.1 起升對稱布置
登錄APP查看全文
