橫搖作用下氣囊-浮筏耦合船用轉(zhuǎn)子系統(tǒng)的非線性動力學(xué)特性
2022-08-17 11:24:24王軍偉柳新科
船舶力學(xué) 2022年8期
謝 旋,李 明,王軍偉,柳新科
(西安科技大學(xué)力學(xué)系,西安 710054)
0 引 言
船舶在海上航行時會受到強(qiáng)風(fēng)、海浪等多種因素的影響,發(fā)生傾斜和搖擺運(yùn)動,如橫搖、縱搖和垂蕩等[1]。在這些牽連運(yùn)動中,橫搖具有運(yùn)動劇烈、周期短暫的特點(diǎn),因此在研究牽連運(yùn)動對船用旋轉(zhuǎn)機(jī)械系統(tǒng)的影響時應(yīng)予以重點(diǎn)考慮。雖然船體橫搖頻率遠(yuǎn)遠(yuǎn)低于氣囊-浮筏耦合船用轉(zhuǎn)子系統(tǒng)的工作頻率,但是由橫搖牽連運(yùn)動產(chǎn)生的科式慣性力會直接影響到氣囊-浮筏耦合船用轉(zhuǎn)子系統(tǒng)的垂向和橫向非線性動力學(xué)行為,因此研究橫搖作用下的氣囊-浮筏耦合船用轉(zhuǎn)子系統(tǒng)的動力學(xué)特性具有重要意義。
氣囊-浮筏隔振系統(tǒng)是一種性能優(yōu)異的隔振設(shè)備,它可以通過充放氣來調(diào)整各氣囊的高度,并且具有固有頻率低、承載能力大、駐波頻率高和無蠕變等特點(diǎn),被廣泛應(yīng)用于各種大型機(jī)械系統(tǒng)的振動控制。近年來,不少學(xué)者在浮筏隔振方面進(jìn)行了研究,Li[2]建立了具有不同頻率和不同幅值的多個激勵作用下的浮筏系統(tǒng)的動力學(xué)模型,基于多尺度法求解幅頻響應(yīng)方程以及解的不穩(wěn)定區(qū)域;Liu[3]研究了浮筏隔振系統(tǒng)(FRIS)對船用離心泵振動特性的影響;方媛媛[4]采用一種改進(jìn)的Bingham 模型,推導(dǎo)了非線性磁流變阻尼力表達(dá)式,建立了船舶輔機(jī)浮筏隔振系統(tǒng)的動力學(xué)模型,分析了磁流變阻尼器各參數(shù)對隔振效果的影響規(guī)律;Zhao[5]考慮到基礎(chǔ)激勵源與浮筏隔振系統(tǒng)之間的耦合效應(yīng),建立了基礎(chǔ)激勵作用下系統(tǒng)的動力學(xué)模型,分析了系統(tǒng)的動力學(xué)特性。上述研究在氣囊-浮筏耦合船用轉(zhuǎn)子系統(tǒng)的動力學(xué)特性及浮筏隔振性能方面進(jìn)行了比較深入的分析。
目前,關(guān)于牽連運(yùn)動下轉(zhuǎn)子-軸承系統(tǒng)動力學(xué)的研究工作主要集中在機(jī)載、車載和艦載等領(lǐng)域,例如,Hou[6-7]考慮了飛機(jī)懸停和正弦機(jī)動飛行兩種工況,以不同工況下帶有三次非線性彈性支承的轉(zhuǎn)子系統(tǒng)為研究對象,建立方程進(jìn)行理論、數(shù)值求解和分岔分析,詳盡分析了機(jī)動轉(zhuǎn)子系統(tǒng)的非線性動力學(xué)行為;Briend[8]考慮到汽車渦輪增壓機(jī)和飛機(jī)渦輪機(jī)上機(jī)載轉(zhuǎn)子的振動會受到各種支撐的影響,建立了多種支撐激勵作用下機(jī)載轉(zhuǎn)子的六自由度運(yùn)動模型并分析了其動力學(xué)特性;Han[9-11]建立了包括旋轉(zhuǎn)、俯仰和偏航運(yùn)動下的柔性轉(zhuǎn)子系統(tǒng)的動力學(xué)模型,分別對只含一個基本運(yùn)動和兩個運(yùn)動耦合下的轉(zhuǎn)子系統(tǒng)進(jìn)行了分析,研究了多種參數(shù)激勵對轉(zhuǎn)子-軸承系統(tǒng)的穩(wěn)定性的影響,提出并驗(yàn)證了基礎(chǔ)縱搖運(yùn)動作用下行星齒輪的動力學(xué)模型;Zhang[12-13]將基底運(yùn)動和非線性油膜力耦合,研究了基礎(chǔ)運(yùn)動對長短軸承假設(shè)下非線性油膜力的影響,建立了考慮船舶橫搖和縱搖運(yùn)動作用下的船用渦輪機(jī)轉(zhuǎn)子系統(tǒng)數(shù)學(xué)模型,分析了系統(tǒng)的非線性動力學(xué)行為;劉鎮(zhèn)星等[14]考慮到艦船搖擺運(yùn)動,引入非線性油膜力并利用拉格朗日方程建立了滑動軸承-齒輪副系統(tǒng)的非線性動力學(xué)模型以分析其動力學(xué)特性,為艦船設(shè)計(jì)中齒輪箱位置的布置提供參考依據(jù);Han[15]建立了垂蕩和非線性油膜力作用下的轉(zhuǎn)子-軸承系統(tǒng)的動力學(xué)模型,研究了垂蕩作用下船用轉(zhuǎn)子系統(tǒng)的動力學(xué)行為。以上研究工作主要考慮了牽連運(yùn)動對轉(zhuǎn)子系統(tǒng)的影響。
動力系統(tǒng)的振動是船舶重要振動噪聲源之一,為了保證艦船的安全性和隱蔽性,一般會采用氣囊-浮筏作為隔振裝置以實(shí)現(xiàn)船用動力系統(tǒng)的減振和降噪。船用旋轉(zhuǎn)機(jī)械系統(tǒng)在增加了隔振裝置后,由于受牽連運(yùn)動的作用,船用轉(zhuǎn)子—軸承系統(tǒng)的振動情況變得更為復(fù)雜,對隔振也提出了更高的要求,因此隔振系統(tǒng)的動力學(xué)行為研究及其參數(shù)優(yōu)化顯得非常迫切。本文重點(diǎn)研究橫搖作用下氣囊-浮筏耦合船用轉(zhuǎn)子系統(tǒng)的非線性動力學(xué)特性。
1 橫搖作用下系統(tǒng)的動力學(xué)模型
1.1 系統(tǒng)動力學(xué)方程的建立
橫搖作用下氣囊-浮筏耦合船用轉(zhuǎn)子系統(tǒng)模型如圖1 所示。為了更好地研究此問題,作以下假設(shè):(1)只考慮船舶橫搖的作用,船舶橫搖時,始終繞著其旋轉(zhuǎn)中心O1Z1軸轉(zhuǎn)動,Z方向的運(yùn)動應(yīng)是一致的,q為船舶橫搖角度,船舶平動的位移分別為x0、y0和z0,船舶平動加速度為0;(2)實(shí)際工況中氣囊-浮筏耦合船用轉(zhuǎn)子系統(tǒng)的安裝位置到旋轉(zhuǎn)中心有一定的距離,垂向距離用a、橫向距離用b來表示,但為了計(jì)算簡便,取a=0,b=0;(3)轉(zhuǎn)子為剛性軸段,圓盤質(zhì)量為m1,偏心距為e,轉(zhuǎn)速為ω,轉(zhuǎn)子相對于船的垂向位移和橫向位移分別為x1和y1;(4)軸承為短軸承,在船舶橫搖時軸承軸向(Z方向)的行為是一致的;(5)軸承支座及浮筏可看成一個整體,質(zhì)量為m2,在船舶橫搖過程中,軸承支座及浮筏整體相對于船的垂向位移和橫向位移分別為x2和y2,氣囊垂向、橫向的剛度及阻尼都是線性的,氣囊垂向總剛度為kv,橫向總剛度為kh,氣囊垂向總阻尼因子為cv,橫向總阻尼因子為ch。O0X0Y0Z0是地面上的定坐標(biāo)系,O1X1Y1Z1是船的平動坐標(biāo)系,始終與定坐標(biāo)系平行,O1X1′Y1′Z1′是固定在船上并隨船旋轉(zhuǎn)的坐標(biāo)系,即聯(lián)船坐標(biāo)系[16]。
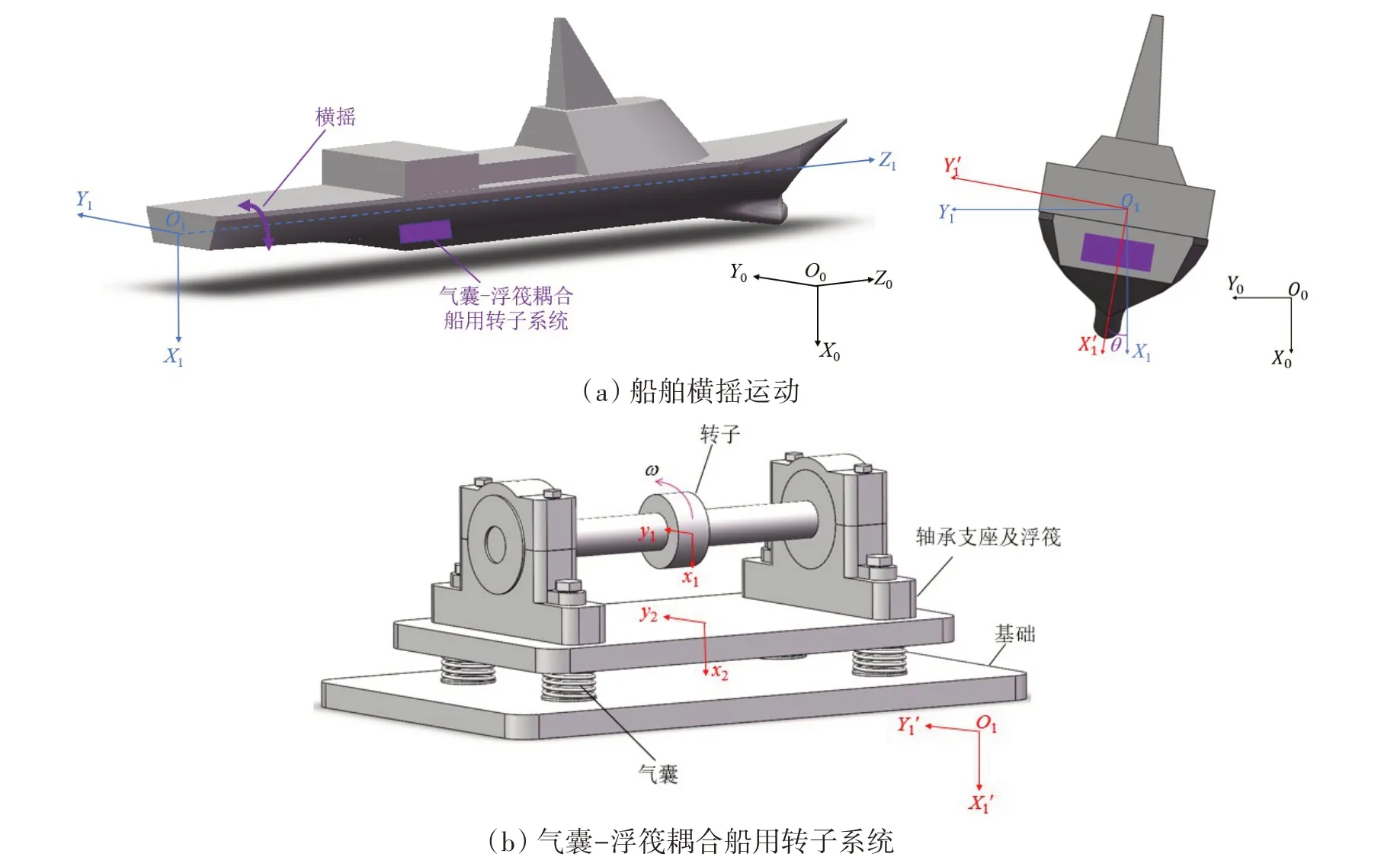
圖1 船舶橫搖運(yùn)動和氣囊-浮筏耦合船用轉(zhuǎn)子系統(tǒng)示意圖Fig.1 Schematic diagram of ship rolling motion and a marine rotor system coupled with air bag-floating raft
船舶橫搖時,有坐標(biāo)轉(zhuǎn)換矩陣

以轉(zhuǎn)子為研究對象,在定坐標(biāo)系中的絕對位移為

式中,橫搖角度θ、轉(zhuǎn)子相對于船位移x1和y1均與時間t有關(guān)。轉(zhuǎn)子絕對位移ra對時間t求兩次導(dǎo)數(shù)得到絕對加速度aa,根據(jù)假設(shè)(1),船舶平動無加速度,則絕對加速度為

式中,絕對加速度aa是由相對加速度項(xiàng)、牽連加速度項(xiàng)以及科式加速度項(xiàng)組成。由于轉(zhuǎn)子只受重力和軸承油膜力,在定坐標(biāo)系中有合力


1.2 無量綱方程
為了增強(qiáng)所研究內(nèi)容的適用性,引入特征長度—軸承油膜間隙c、時間尺度—時間t等物理量,對動力學(xué)微分方程中的各個物理量進(jìn)行無量綱處理,相關(guān)參數(shù)見表1。
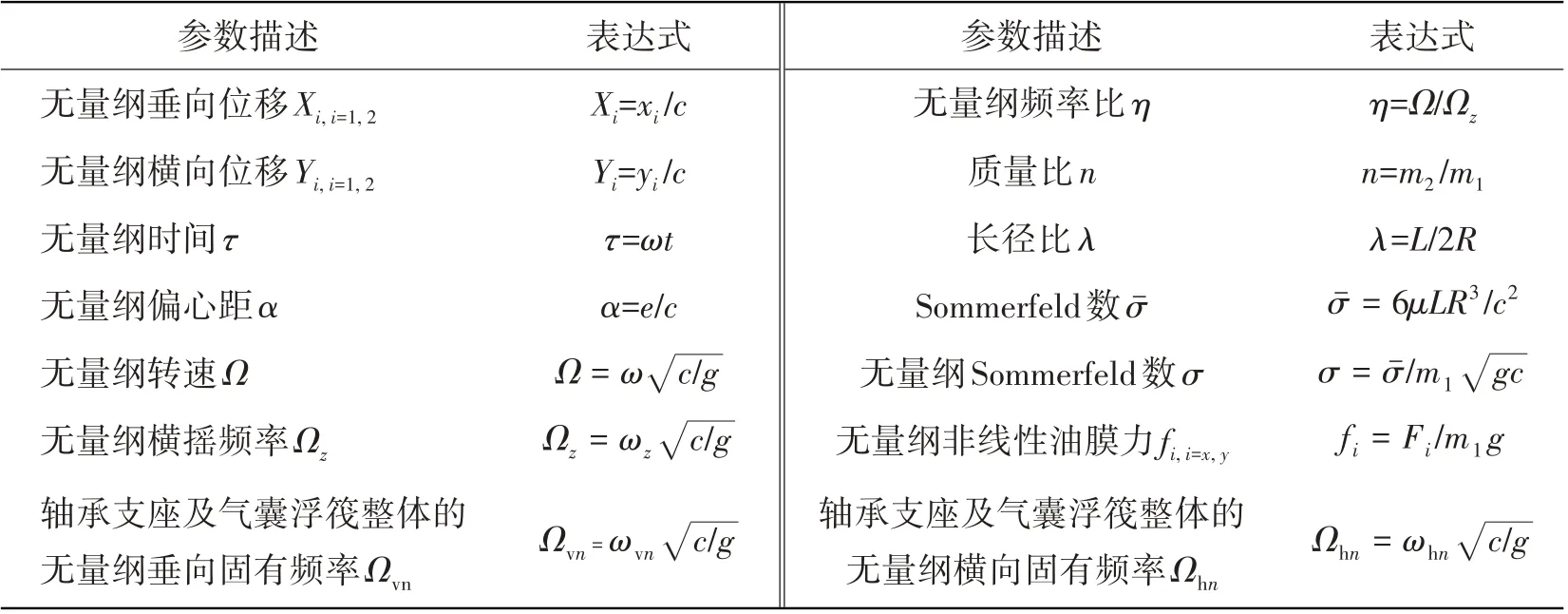
表1 無量綱參數(shù)表達(dá)式Tab.1 Expression of dimentionless parameters
對方程進(jìn)行無量綱化,有以下規(guī)定:x?=dx/dt,y?=dy/dt,θ?=dθ/dt,X′=dX/dτ,Y′=dY/dτ以及θ′=dθ/dτ。假定船體產(chǎn)生橫搖運(yùn)動的橫搖位移關(guān)系式滿足正弦規(guī)律[13,20-21]θ=θmsin(ωz t),其中,θm是無量綱橫搖幅值,ωz是橫搖頻率。又由τ=ωt,可以把θ表示成關(guān)于無量綱時間τ的函數(shù):

對式(8)進(jìn)行無量綱化,并與式(11)聯(lián)立得到系統(tǒng)無量綱運(yùn)動方程:

式中,Ω是轉(zhuǎn)子無量綱轉(zhuǎn)速,η是轉(zhuǎn)子無量綱轉(zhuǎn)速與無量綱橫搖頻率之比,α是轉(zhuǎn)子無量綱偏心距,θm是無量綱橫搖幅值,n是質(zhì)量比,Ωvn和Ωhn分別是軸承支座及氣囊浮筏整體的無量綱垂向、橫向固有頻率,fx和fy為無量綱非線性油膜力。
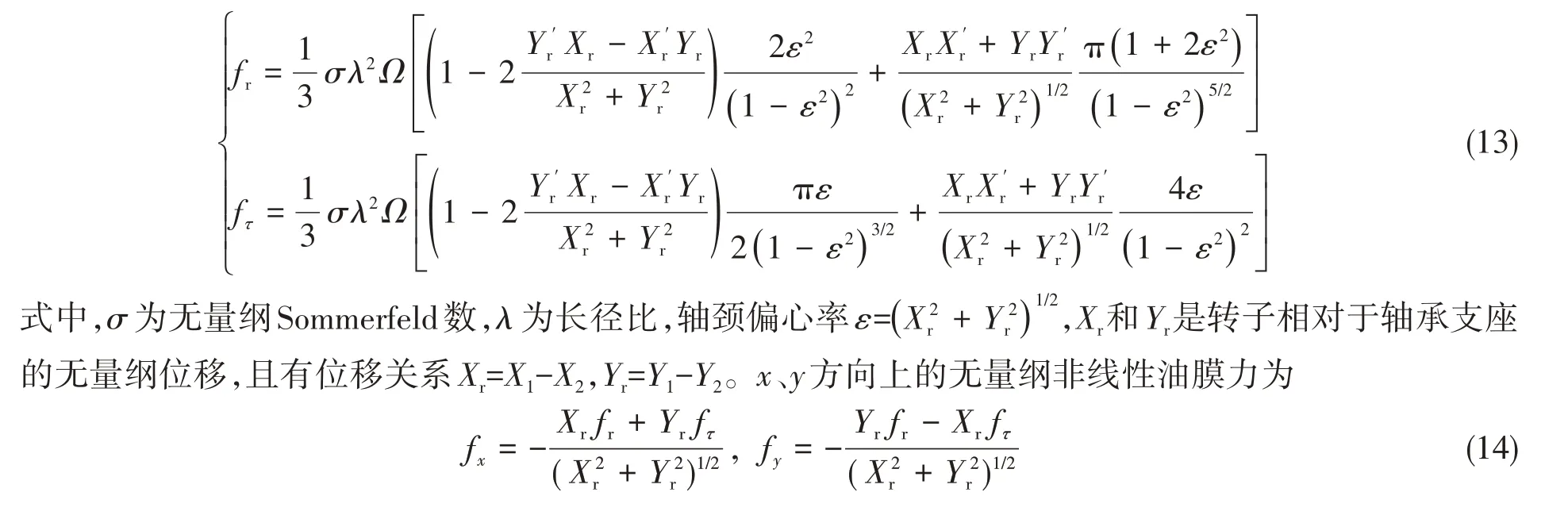
對式(9)無量綱化,得非線性油膜力的無量綱表達(dá)式:
2 非線性動力學(xué)分析
考慮到油膜力的強(qiáng)非線性特性,采用4 階Runge-Kutta 方法對無量綱的動力學(xué)微分方程進(jìn)行求解。氣囊浮筏-耦合轉(zhuǎn)子系統(tǒng)無量綱參數(shù)取值:σ=3、λ=0.2、α=0.05、n=60、Ωvn=0.5、Ωhn=0.5、ζv=0.1及ζh=0.1,轉(zhuǎn)子轉(zhuǎn)速W取值范圍為0.6~3.5。船舶發(fā)生橫搖時,主要參數(shù)有幅值和頻率,參數(shù)取值范圍[22]見表2。

表2 船舶橫搖參數(shù)取值范圍Tab.2 Range of ship rolling parameters
2.1 轉(zhuǎn)子轉(zhuǎn)速變化對橫搖作用下系統(tǒng)動力學(xué)特性的影響
圖2(a)為橫搖幅值θm=0 時,即無橫搖作用時系統(tǒng)位移隨轉(zhuǎn)子轉(zhuǎn)速Ω變化的分岔圖。系統(tǒng)隨轉(zhuǎn)子轉(zhuǎn)速的增加表現(xiàn)出周期1、周期2、準(zhǔn)周期和混沌等典型的非線性動力學(xué)特性,具體表現(xiàn)為:轉(zhuǎn)速小于2.29時,系統(tǒng)呈穩(wěn)定的周期1運(yùn)動狀態(tài);隨著轉(zhuǎn)速的增加,系統(tǒng)運(yùn)動狀態(tài)由周期1經(jīng)倍周期分岔到周期2;轉(zhuǎn)速繼續(xù)增加,系統(tǒng)運(yùn)動狀態(tài)由周期2 分岔的兩支合為一支,系統(tǒng)呈周期1 運(yùn)動狀態(tài);轉(zhuǎn)速持續(xù)增加,系統(tǒng)發(fā)生準(zhǔn)周期分岔,轉(zhuǎn)子的位移幅值也在持續(xù)增大,系統(tǒng)呈準(zhǔn)周期運(yùn)動狀態(tài);轉(zhuǎn)速持續(xù)增加至大于3.43后,最大Lyapunov指數(shù)數(shù)值大于0,系統(tǒng)處于混沌狀態(tài)。
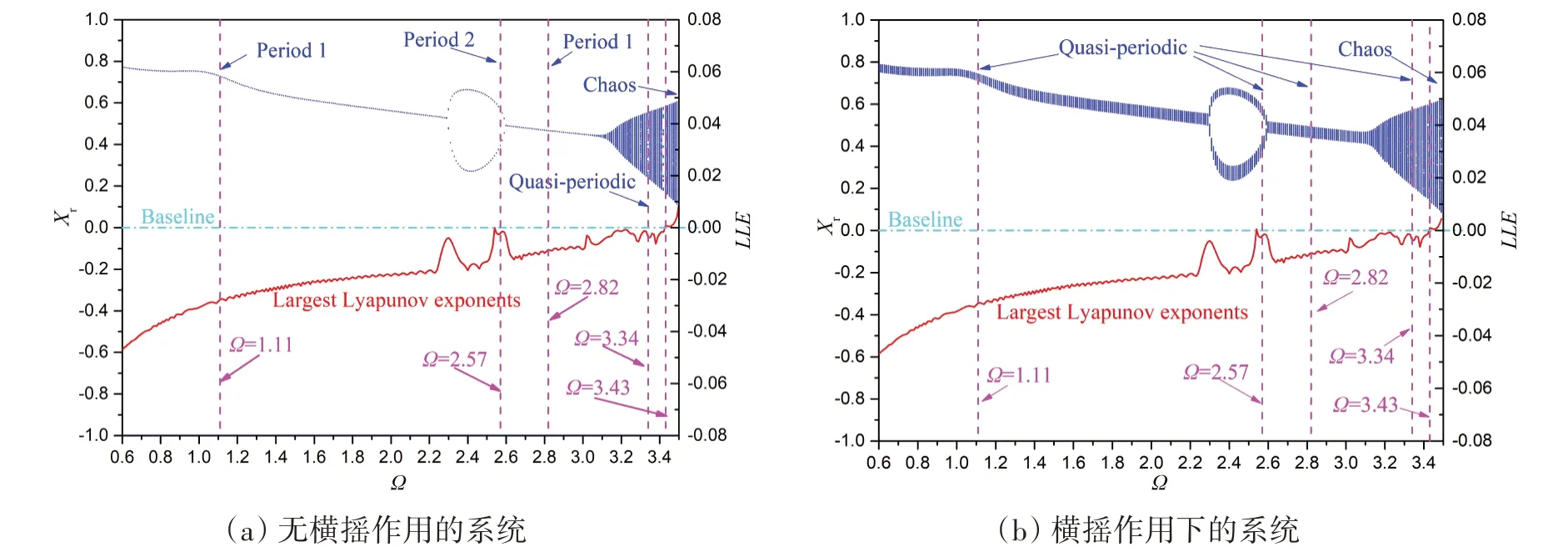
圖2 位移Xr隨轉(zhuǎn)速Ω變化的分岔圖及最大Lyapunov指數(shù)Fig.2 Bifurcation diagram of displacement Xr with speed Ω and its largest Lyapunov exponents
圖2(b)為橫搖幅值θm=0.05、橫搖頻率Ωz=0.01時,橫搖作用時系統(tǒng)位移隨轉(zhuǎn)子轉(zhuǎn)速Ω變化的分岔圖。橫搖作用下的轉(zhuǎn)子系統(tǒng)隨著轉(zhuǎn)子轉(zhuǎn)速增加表現(xiàn)出準(zhǔn)周期和混沌的非線性動力學(xué)特性,表現(xiàn)為:轉(zhuǎn)速較低時,系統(tǒng)處于準(zhǔn)周期運(yùn)動狀態(tài);轉(zhuǎn)速增加至2.29處,準(zhǔn)周期由一支分岔為兩支,系統(tǒng)運(yùn)動狀態(tài)仍是準(zhǔn)周期的;轉(zhuǎn)速繼續(xù)增加至2.61處,準(zhǔn)周期分岔的兩支又合為一支,系統(tǒng)處于準(zhǔn)周期運(yùn)動狀態(tài);轉(zhuǎn)速持續(xù)增加,系統(tǒng)位移幅值也持續(xù)增加,隨后轉(zhuǎn)速增加至3.43 處,最大Lyapunov 指數(shù)數(shù)值大于0,系統(tǒng)進(jìn)入混沌狀態(tài)。與無橫搖作用的系統(tǒng)相比,橫搖作用下系統(tǒng)的運(yùn)動狀態(tài)更為復(fù)雜。
圖3~6是橫搖幅值θm=0.05、橫搖頻率Ωz=0.01時,轉(zhuǎn)子轉(zhuǎn)速Ω分別為1.11、2.57、2.82和3.48情況下系統(tǒng)的動力學(xué)穩(wěn)態(tài)響應(yīng)。轉(zhuǎn)子轉(zhuǎn)速Ω=1.11時,轉(zhuǎn)子軸心軌跡形似“梭形”,對比垂向和橫向位移變化,橫向的振動幅值更大,龐加萊截面上的點(diǎn)構(gòu)成了一條封閉曲線;時域響應(yīng)中轉(zhuǎn)子位移峰值隨著時間的波動較小,頻域響應(yīng)中橫搖頻率f0和工作頻率f1=1/2π=0.159 占主要成分,倍頻2f1等存在但占比很小,此時最大Lyapunov指數(shù)為-0.027 71,系統(tǒng)處于準(zhǔn)周期運(yùn)動狀態(tài)。
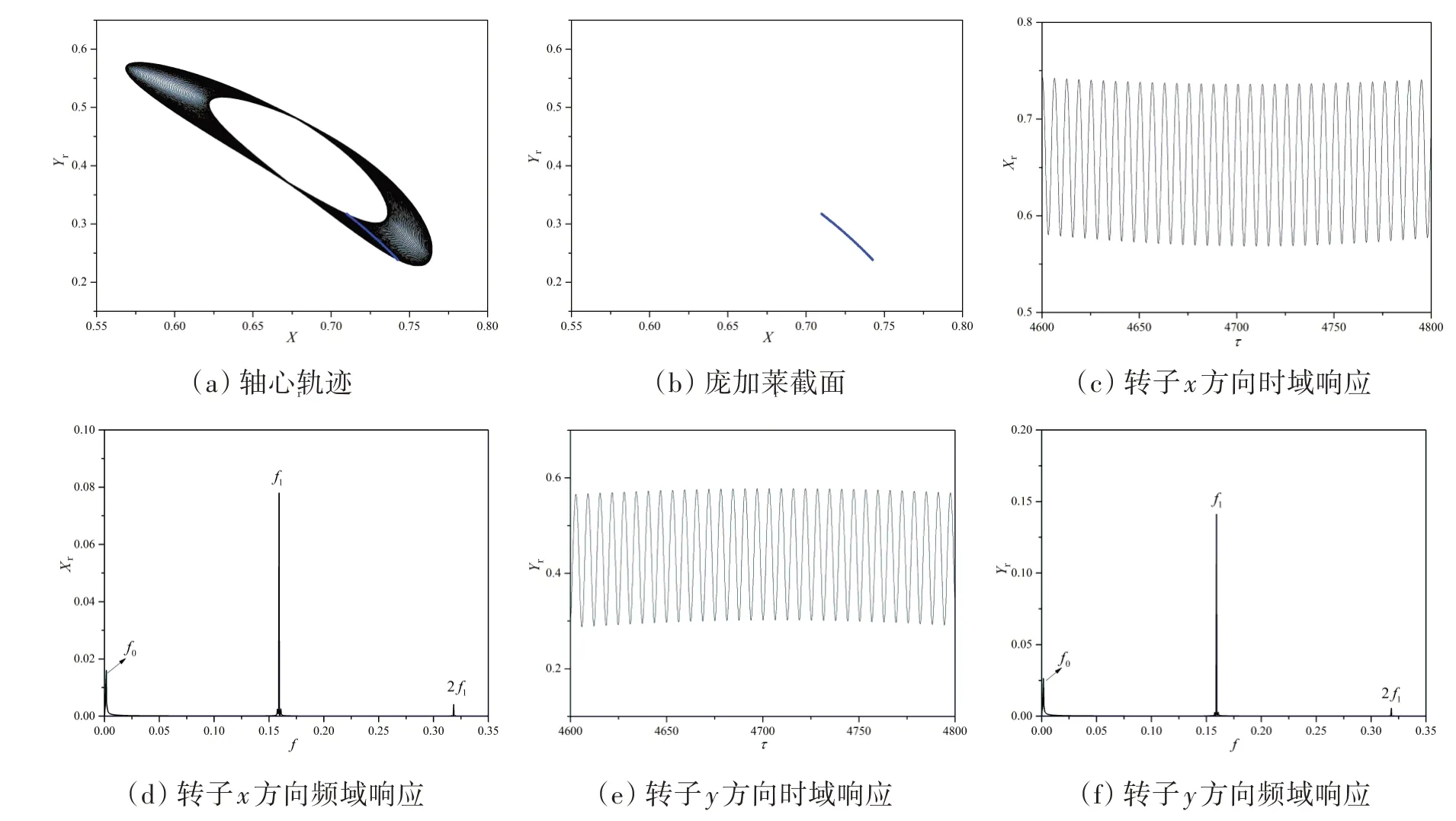
圖3 θm=0.05、Ωz=0.01、Ω=1.11時,系統(tǒng)的穩(wěn)態(tài)響應(yīng)Fig.3 Steady-state response of the system with θm=0.05,Ωz=0.01,Ω=1.11
圖4 θm=0.05、Ωz=0.01、Ω=2.57時,系統(tǒng)的穩(wěn)態(tài)響應(yīng)Fig.4 Steady-state response of the system with θm=0.05,Ωz=0.01,Ω=2.57
轉(zhuǎn)子轉(zhuǎn)速Ω=2.82時,系統(tǒng)的穩(wěn)態(tài)響應(yīng)較之前更為平穩(wěn),振動幅值減小并趨于穩(wěn)定。這時軸心軌跡圖中轉(zhuǎn)子的垂向和橫向位移變化對比,轉(zhuǎn)子垂向振動幅值略大于橫向,龐加萊截面上的點(diǎn)構(gòu)成了一條封閉曲線;時域響應(yīng)中位移峰值的波動較小,頻域響應(yīng)中橫搖頻率f0和工作頻率f1=1/2π=0.159占主要成分,還有倍頻2f1等存在但占比很小,此時最大Lyapunov指數(shù)為-0.008 46,系統(tǒng)處于準(zhǔn)周期運(yùn)動狀態(tài)。
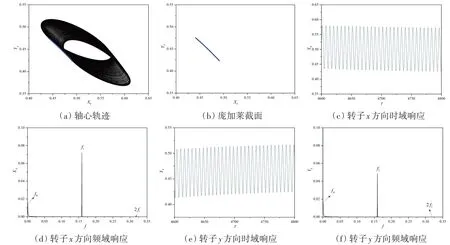
圖5 θm=0.05、Ωz=0.01、Ω=2.82時,系統(tǒng)的穩(wěn)態(tài)響應(yīng)Fig.5 Steady-state response of the system with θm=0.05,Ωz=0.01,Ω=2.82
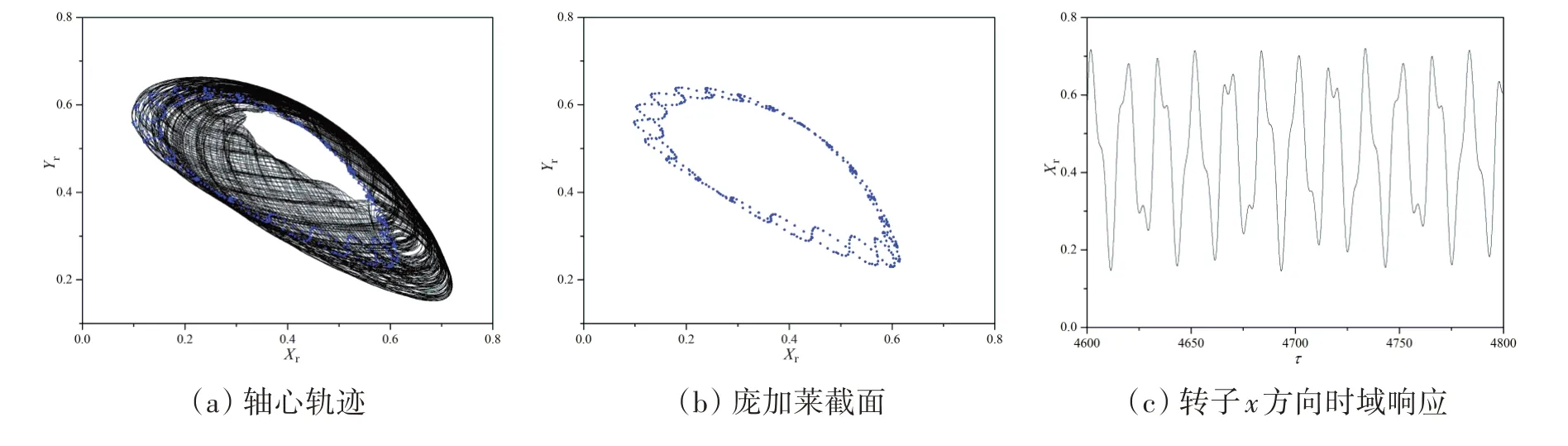

圖6 θm=0.05、Ωz=0.01、Ω=3.48時,系統(tǒng)的穩(wěn)態(tài)響應(yīng)Fig.6 Steady-state response of the system with θm=0.05,Ωz=0.01,Ω=3.48
圖7 為有無橫搖作用下轉(zhuǎn)子垂向、橫向振動幅值與轉(zhuǎn)子轉(zhuǎn)速關(guān)系。這時橫搖作用的幅值θm=0.05,對比無橫搖作用的系統(tǒng),有橫搖作用的系統(tǒng)垂向、橫向振動幅值都更大。轉(zhuǎn)子轉(zhuǎn)速Ω從0.6 至1.11,振動幅值呈增加趨勢;Ω從1.11 至2.3,振動幅值有所減小;Ω從2.3 至2.6,振動幅值突然增加后又減小;Ω從2.6 至3.08,振動幅值稍有增加趨勢;Ω大于3.08 后,振動幅值增加迅速。低轉(zhuǎn)速時,轉(zhuǎn)子橫向振動幅值大于垂向;高轉(zhuǎn)速時,轉(zhuǎn)子垂向振動幅值大于橫向。
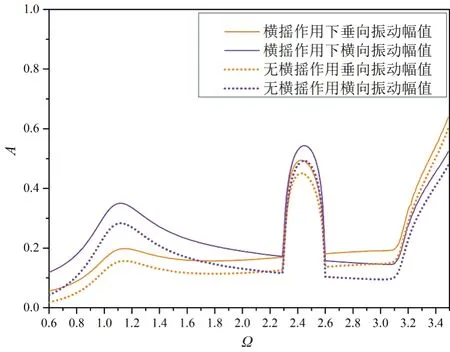
圖7 轉(zhuǎn)子振動幅值與轉(zhuǎn)速關(guān)系Fig.7 Relationship of rotor vibration amplitudes with speeds
2.2 橫搖幅值對系統(tǒng)動力學(xué)特性的影響
圖8為橫搖頻率Ωz=0.01,橫搖幅值θm分別等于0.25、0.45時系統(tǒng)的分岔圖及其最大Lyapunov指數(shù)圖。對比圖2中無橫搖作用和橫搖幅值θm=0.05時系統(tǒng)的分岔圖及其最大Lyapunov 指數(shù)圖,在較大橫搖幅值的情況下,隨著轉(zhuǎn)子轉(zhuǎn)速增加,系統(tǒng)仍是在固定的轉(zhuǎn)速時發(fā)生分岔、并以一確定的轉(zhuǎn)速進(jìn)入混沌,由此可見,橫搖幅值的變化并不會影響到系統(tǒng)運(yùn)動狀態(tài)的改變。

圖8 不同橫搖幅值時位移Xr隨轉(zhuǎn)速Ω變化的分岔圖及最大Lyapunov指數(shù)Fig.8 Bifurcation diagram of displacement Xr varying with speed Ω and its largest Lyapunov exponents at different roll amplitudes
圖9為不同橫搖幅值條件下轉(zhuǎn)子垂向振動幅值與轉(zhuǎn)速的關(guān)系。不同橫搖幅值下的轉(zhuǎn)子垂向振動幅值隨轉(zhuǎn)速變化的曲線具有相似性。在轉(zhuǎn)速變化范圍內(nèi),大橫搖幅值對應(yīng)的曲線始終在小橫搖幅值對應(yīng)的曲線的上方,說明橫搖幅值的增加會使系統(tǒng)的振動幅值增大。
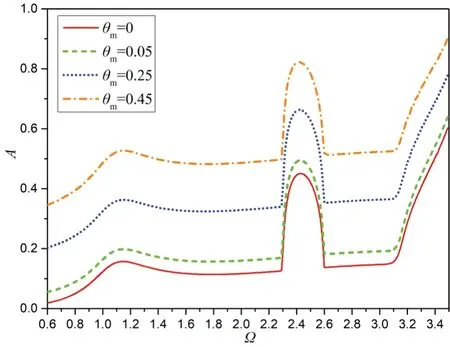
圖9 不同橫搖幅值時垂向振動幅值與轉(zhuǎn)子轉(zhuǎn)速關(guān)系Fig.9 Relationship between vertical vibration amplitude and rotor speed at different roll amplitudes
圖10 為不同的轉(zhuǎn)子轉(zhuǎn)速條件下轉(zhuǎn)子的垂向振動幅值隨橫搖幅值的變化關(guān)系圖。隨著橫搖幅值的增加,垂向振動幅值以曲線的形式增大;在轉(zhuǎn)速Ω=3.48 條件下,橫搖幅值增加到0.64 時,轉(zhuǎn)子垂向振動幅值為1,垂向振動幅值等于軸承油膜間隙,轉(zhuǎn)子與軸承發(fā)生碰撞,大角度的橫搖對高轉(zhuǎn)速轉(zhuǎn)子系統(tǒng)運(yùn)行的安全穩(wěn)定性影響極大;對比圖中轉(zhuǎn)速Ω=2.57和Ω=2.82時垂向振動幅值與橫搖幅值的關(guān)系曲線,θm小于0.5 時,兩條關(guān)系曲線幾近重合,θm大于0.5 后,Ω=2.57 對應(yīng)曲線始終在Ω=2.82 對應(yīng)曲線的上方,系統(tǒng)在轉(zhuǎn)速為2.82時抵抗大幅度橫搖的能力較轉(zhuǎn)速為2.57時更強(qiáng)。
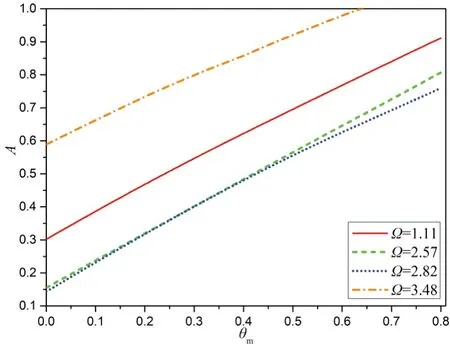
圖10 不同轉(zhuǎn)子轉(zhuǎn)速時垂向振動幅值與橫搖幅值關(guān)系Fig.10 Relationship between vertical vibration amplitude and roll amplitude at different rotor speeds
3 結(jié) 論
在對橫搖作用下氣囊-浮筏耦合船用轉(zhuǎn)子系統(tǒng)的非線性動力學(xué)特性進(jìn)行研究時,本文考慮了船舶橫搖運(yùn)動對氣囊浮筏耦合船用轉(zhuǎn)子系統(tǒng)的影響,建立了橫搖作用下系統(tǒng)的動力學(xué)模型,對動力學(xué)方程進(jìn)行了無量綱化處理,并采用數(shù)值方法求解得到了系統(tǒng)的穩(wěn)態(tài)響應(yīng),分析了橫搖作用下系統(tǒng)的非線性動力學(xué)特性。研究表明:
(1)橫搖作用下氣囊-浮筏耦合船用轉(zhuǎn)子系統(tǒng)的運(yùn)動狀態(tài),隨轉(zhuǎn)子轉(zhuǎn)速的增加表現(xiàn)為:準(zhǔn)周期→混沌;相較于無橫搖作用的系統(tǒng)出現(xiàn)的周期1、周期2等簡單周期同步運(yùn)動,橫搖作用下系統(tǒng)的運(yùn)動狀態(tài)更為復(fù)雜;對比無橫搖作用時系統(tǒng)的振動幅值,橫搖作用下系統(tǒng)的振動幅值增大明顯。
(2)橫搖作用下氣囊-浮筏耦合船用轉(zhuǎn)子系統(tǒng),隨著橫搖幅值的增大,其運(yùn)動狀態(tài)仍是由準(zhǔn)周期過渡到混沌,一般情況下橫搖幅值的增減不會影響到橫搖作用下系統(tǒng)的分岔及混沌特性。此外,橫搖作用下系統(tǒng)的振動幅值會隨著橫搖幅值的增大而增大,且這種增大關(guān)系是以曲線形式呈現(xiàn)的。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
