面向特征繼承性增減的在線分類(lèi)算法
2022-08-12 13:29:30劉兆清古仕林侯臣平
計(jì)算機(jī)研究與發(fā)展 2022年8期
關(guān)鍵詞:特征實(shí)驗(yàn)
劉兆清 古仕林 侯臣平
(國(guó)防科技大學(xué)文理學(xué)院 長(zhǎng)沙 410073)
由于現(xiàn)實(shí)環(huán)境的開(kāi)放性與復(fù)雜性,在許多實(shí)際應(yīng)用中,人們不得不面臨數(shù)據(jù)的數(shù)量與特征維度都在同時(shí)變化的情形.一個(gè)典型的場(chǎng)景就是數(shù)據(jù)當(dāng)前的特征增加,下一時(shí)刻的數(shù)據(jù)特征只有部分被繼承,并且由于環(huán)境變化難以預(yù)知,哪些特征會(huì)消失、哪些特征會(huì)被繼承難以提前確定.本文將這樣的數(shù)據(jù)稱(chēng)為特征繼承性增減的流式數(shù)據(jù).例如,在環(huán)境監(jiān)測(cè)任務(wù)中,任意時(shí)刻環(huán)境中都存在著多種不同壽命的傳感器,每個(gè)傳感器的反饋均被視為一個(gè)特征[1],不同特征因?yàn)閭鞲衅鲏勖煌S持的時(shí)間也不同.在壽命較短的傳感器失效之前,為維持對(duì)環(huán)境的觀察,會(huì)向環(huán)境投放新的傳感器,使得在某個(gè)較短的時(shí)期內(nèi)數(shù)據(jù)會(huì)包含歷史特征與新增特征;當(dāng)這部分壽命較短的傳感器失效后,其對(duì)應(yīng)的特征隨即消失,而壽命較長(zhǎng)的傳感器對(duì)應(yīng)的特征將繼承到下一時(shí)刻.總體來(lái)說(shuō),這是一個(gè)特征先進(jìn)行增加,然后有繼承地減少的過(guò)程.
具體地,如圖1所示:在T1的初始階段(綠色部分),環(huán)境中存在2種傳感器,返回的數(shù)據(jù)具有特征S1與S2;在b1階段,新一批傳感器被部署在環(huán)境中,數(shù)據(jù)中新增特征S3,此時(shí)數(shù)據(jù)中共包含3種特征,稱(chēng)為過(guò)渡階段;在T2的初始階段(藍(lán)色部分),第1批傳感器到達(dá)使用壽命之后被銷(xiāo)毀,其對(duì)應(yīng)的數(shù)據(jù)特征S1隨即消失,此時(shí)數(shù)據(jù)特征僅剩繼承自上個(gè)階段的S2與S3,在b2階段,又有一批新的傳感器被部署在環(huán)境中,數(shù)據(jù)中又會(huì)出現(xiàn)新的特征S4.在現(xiàn)實(shí)場(chǎng)景中,數(shù)據(jù)流的特征將隨時(shí)間不斷增加或減少,但由于傳感器壽命的差異性,上一時(shí)刻數(shù)據(jù)的特征總有一部分會(huì)繼承到下一時(shí)刻,因此我們將其定義為特征繼承性增減的流式數(shù)據(jù).
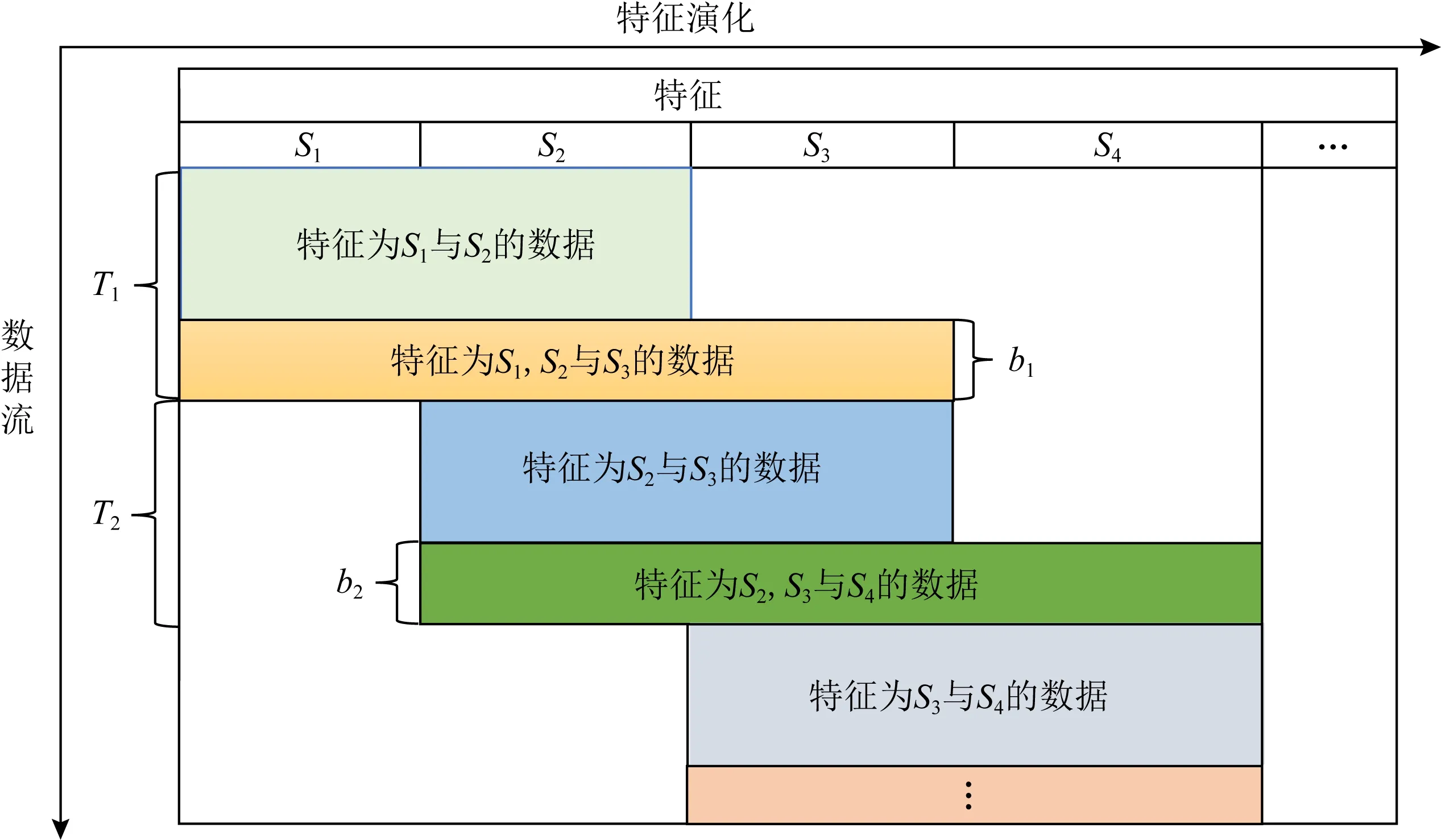
Fig. 1 The feature evolution pattern of environment monitoring圖1 環(huán)境監(jiān)測(cè)任務(wù)中特征的演化規(guī)律
傳統(tǒng)的在線學(xué)習(xí)算法要么假設(shè)數(shù)據(jù)以流的形式依次到達(dá)但是其特征空間保持不變[2-7],要么假設(shè)特征以流的形式不斷到達(dá)但是訓(xùn)練數(shù)據(jù)集保持不變[8-13],這些都無(wú)法直接用于處理特征繼承性增減的流式數(shù)據(jù).解決該問(wèn)題一個(gè)簡(jiǎn)單直接的方法是只利用具有相同特征空間的數(shù)據(jù)進(jìn)行模型訓(xùn)練,但是這樣并不能取得好的預(yù)測(cè)效果,主要原因有2個(gè):1)部分特征消失后,消失特征對(duì)應(yīng)的權(quán)重?zé)o法繼續(xù)利用,在過(guò)去的迭代過(guò)程中從樣本中提取的信息被浪費(fèi),產(chǎn)生了信息的損失;2)在新特征出現(xiàn)的初始階段,具有新特征的樣本數(shù)量少,不足以充分訓(xùn)練分類(lèi)器,對(duì)分類(lèi)器的性能造成影響.
解決特征動(dòng)態(tài)變化這一問(wèn)題的關(guān)鍵就是建立一個(gè)能盡可能多地繼承原有信息的動(dòng)態(tài)分類(lèi)模型.基于上述思想,近年來(lái)有極少部分工作針對(duì)動(dòng)態(tài)特征的場(chǎng)景進(jìn)行了研究[14-16].這些工作采用不同的特征劃分或投影策略來(lái)構(gòu)建動(dòng)態(tài)模型,在處理特征動(dòng)態(tài)變化的問(wèn)題上做出了原創(chuàng)性的貢獻(xiàn).但是,上述工作假設(shè)的數(shù)據(jù)特征演化方式與本文都不相同,因此相關(guān)的技術(shù)挑戰(zhàn)和解決方法也各不相同.
針對(duì)特征繼承性增減的流式數(shù)據(jù)分類(lèi)問(wèn)題,本文提出了一種面向特征繼承性增減的在線分類(lèi)算法(online classification algorithm with feature inheritably increasing and decreasing, OFID)及其2種變體OFID -Ⅰ和OFID -Ⅱ.當(dāng)新特征出現(xiàn)時(shí),OFID引入新權(quán)重對(duì)其進(jìn)行學(xué)習(xí),對(duì)原始特征與新增特征上的分類(lèi)器制定不同的更新策略,通過(guò)結(jié)合在線被動(dòng)-主動(dòng)(online passive aggressive algorithms, PA)算法[5]與結(jié)構(gòu)風(fēng)險(xiǎn)最小化原則分別更新原始特征與新增特征上的分類(lèi)器;當(dāng)部分原始特征消失時(shí),利用歷史數(shù)據(jù)與當(dāng)前數(shù)據(jù)的一致性,運(yùn)用在線矩陣補(bǔ)全的方法,對(duì)數(shù)據(jù)流的缺失部分使用Frequent-Directions算法[17-18]進(jìn)行恢復(fù),使得原始分類(lèi)器得以繼續(xù)更新迭代;為防止出現(xiàn)過(guò)擬合現(xiàn)象,開(kāi)發(fā)了OFID算法的2種軟間隔變體OFID -Ⅰ和OFID -Ⅱ.理論分析和實(shí)驗(yàn)結(jié)果分析都驗(yàn)證了本文所提算法的有效性.
本文工作的創(chuàng)新點(diǎn)總結(jié)有3個(gè)方面:
1) 研究了一個(gè)對(duì)特征繼承性增減的數(shù)據(jù)流進(jìn)行分類(lèi)的新問(wèn)題,這一問(wèn)題具有重要的實(shí)際應(yīng)用價(jià)值,對(duì)該問(wèn)題進(jìn)行專(zhuān)門(mén)的研究.
2) 設(shè)計(jì)了一種新穎的算法OFID及其2種變體OFID -Ⅰ和OFID -Ⅱ,從特征繼承性增減的數(shù)據(jù)流中學(xué)習(xí)高度動(dòng)態(tài)的分類(lèi)模型.從理論上證明了OFID系列算法的損失上界,保證了算法的可靠性與有效性.
3) 通過(guò)對(duì)比實(shí)驗(yàn),在公開(kāi)數(shù)據(jù)集上與其他算法進(jìn)行了對(duì)比,并取得了良好的表現(xiàn);同時(shí)通過(guò)另外2組輔助實(shí)驗(yàn)探究了算法的參數(shù)敏感程度與時(shí)間復(fù)雜情況,驗(yàn)證了算法自身的良好性質(zhì).
1 相關(guān)工作
針對(duì)特征動(dòng)態(tài)變化的在線學(xué)習(xí)研究在實(shí)踐上具有廣泛的應(yīng)用前景,例如環(huán)境監(jiān)測(cè)、垃圾郵件識(shí)別等.本文致力于研究面向特征繼承性增減的在線學(xué)習(xí)方法,主要包含2個(gè)方面:1)在線學(xué)習(xí);2)特征動(dòng)態(tài)變化.下面我們將從這2個(gè)方面對(duì)本文的相關(guān)工作進(jìn)行概述.
在線學(xué)習(xí)的研究經(jīng)歷了較長(zhǎng)時(shí)間的發(fā)展,具有成熟的理論與巨大的應(yīng)用價(jià)值[13],期間發(fā)展出許多經(jīng)典的方法.大致可以將現(xiàn)有在線學(xué)習(xí)方法分為利用模型一階信息和二階信息的方法.利用一階信息的在線學(xué)習(xí)算法有感知機(jī)算法(perceptron learning algorithm, PLA)[7]、PA算法[5]、在線梯度下降算法(online gradient descent algorithm, OGD)[19]等.感知機(jī)算法只在當(dāng)前模型預(yù)測(cè)出現(xiàn)錯(cuò)誤的情況下才會(huì)更新,而PA算法只要當(dāng)模型產(chǎn)生的預(yù)測(cè)損失不為0(即使數(shù)據(jù)標(biāo)簽預(yù)測(cè)正確),都會(huì)主動(dòng)更新當(dāng)前模型.其核心思想是尋找與當(dāng)前分類(lèi)模型最近鄰的約束,若當(dāng)前模型對(duì)新來(lái)數(shù)據(jù)預(yù)測(cè)沒(méi)有損失,模型不更新,否則,模型主動(dòng)更新,即投影到離現(xiàn)有分類(lèi)模型最近鄰的位置.因此,PA算法在大多數(shù)情形下都會(huì)顯著的優(yōu)于感知機(jī)算法.在線梯度下降算法在每次迭代時(shí)都沿當(dāng)前損失函數(shù)梯度下降的方向更新模型,然后將更新后的模型投影到可行域中.利用二階信息的在線算法有二階感知機(jī)算法[20]、NHERD[21]算法(normal herding method via Gaussian herding)、SCW(soft confidence weighted algorithm)算法[22]、IELLIP(online learning algorithms by improved Ellipsoid)算法[23]、AROW(adaptive regularization of weight vectors)算法[24]等.利用二階信息的算法有著更優(yōu)異的預(yù)測(cè)效果,但是其計(jì)算開(kāi)支與一階算法相比更大.
以上這些算法建立在數(shù)據(jù)特征空間固定的基礎(chǔ)之上,不能直接在動(dòng)態(tài)特征的場(chǎng)景下進(jìn)行應(yīng)用.為解決動(dòng)態(tài)特征場(chǎng)景下的在線學(xué)習(xí)問(wèn)題,極少部分研究者結(jié)合各種特征演化規(guī)律,提出了一些在線動(dòng)態(tài)特征學(xué)習(xí)算法.Zhang等人首先對(duì)數(shù)據(jù)數(shù)量與特征維度隨時(shí)間不斷增加的場(chǎng)景進(jìn)行了研究,提出了OLSF系列算法(online learning with streaming features)[14].Zhang等人將數(shù)量與特征維度都隨時(shí)間增加的數(shù)據(jù)稱(chēng)為梯形數(shù)據(jù),當(dāng)新到達(dá)的數(shù)據(jù)攜帶了新的特征時(shí),OLSF算法將數(shù)據(jù)特征分為歷史特征和新增特征2部分,通過(guò)改進(jìn)PA算法使得分類(lèi)器在面對(duì)2種特征時(shí)執(zhí)行不同的在線更新規(guī)則.針對(duì)訓(xùn)練集固定、特征以流到來(lái)的場(chǎng)景,Wu等人[25]提出了OSFS(online streaming feature selection)算法對(duì)數(shù)據(jù)進(jìn)行在線特征選擇.Hou等人[26]在OLSF的基礎(chǔ)上研究了特征有增有減的場(chǎng)景,提出FESL(feature evolvable streaming learning)算法,其假設(shè)數(shù)據(jù)的歷史特征是同時(shí)消失的,不具有繼承性.FESL通過(guò)在新增特征與歷史特征共存的階段學(xué)習(xí)特征之間的映射關(guān)系,從而在歷史特征消失后可以利用新增特征對(duì)歷史特征進(jìn)行恢復(fù),并在2種特征上分別訓(xùn)練分類(lèi)器,最后利用集成學(xué)習(xí)的思想對(duì)2個(gè)預(yù)測(cè)結(jié)果進(jìn)行集成得到最后的分類(lèi)結(jié)果.在FESL算法的基礎(chǔ)上,后續(xù)發(fā)展了EDM(evolving discrepancy minimization)[27]和PUFE(prediction with unpredictable feature evolution)算法[28],對(duì)FESL場(chǎng)景進(jìn)行了深入探索和擴(kuò)展.進(jìn)一步地,有研究者研究了數(shù)據(jù)流的特征可以任意新增或消失的情形.如He等人[29]提出了OLVF算法(online learning with varying feature space),將當(dāng)前樣本的特征分為存留特征、共享特征和新特征3部分,將現(xiàn)有模型投影到共享的特征空間中進(jìn)行預(yù)測(cè)更新.Beyazit等人[30]提出了GLSC算法(generative learning with streaming capricious data),在全特征空間上學(xué)習(xí)新特征與舊特征之間的映射關(guān)系.
2 面向特征繼承性增減的在線學(xué)習(xí)算法
本節(jié)首先詳細(xì)介紹繼承性增減的場(chǎng)景以及本文用到的符號(hào)和相關(guān)含義,然后對(duì)OFID算法進(jìn)行介紹,梳理算法的整體思路,提出相關(guān)策略并形成對(duì)應(yīng)的優(yōu)化問(wèn)題,然后對(duì)優(yōu)化問(wèn)題進(jìn)行求解,在最后給出算法的偽代碼.
2.1 問(wèn)題設(shè)定以及相關(guān)符號(hào)
本文需要完成特征繼承性增減場(chǎng)景下的在線二分類(lèi)任務(wù),本節(jié)首先介紹該場(chǎng)景下數(shù)據(jù)特征的變化特點(diǎn),后面列出用到的符號(hào)與概念,最后抽象為數(shù)學(xué)形式上的問(wèn)題.
本場(chǎng)景下數(shù)據(jù)的變化呈現(xiàn)出明顯的階段性趨勢(shì),如圖1所示,以數(shù)據(jù)特征經(jīng)歷一輪完整的繼承性增減的時(shí)間為一個(gè)處理階段,例如階段1~T2-b2,不同階段數(shù)據(jù)的特征變化非常相似,在處理數(shù)據(jù)時(shí)可以按照階段進(jìn)行.每個(gè)階段大致可以分為3個(gè)部分,每個(gè)部分內(nèi)數(shù)據(jù)的特征保持穩(wěn)定,突變發(fā)生在第2,3部分,單階段內(nèi)特征變化規(guī)律為:
① 1~T1-b1
這段時(shí)間內(nèi)數(shù)據(jù)的特征空間與第1個(gè)樣本相同,此階段的數(shù)據(jù)具有特征S1與S2;
②T1-b1+1~T1
本階段的初始,t=T1-b1+1時(shí),特征空間發(fā)生突變,數(shù)據(jù)的維度升高,此時(shí)數(shù)據(jù)攜帶特征S1,S2與S3,本時(shí)段也被稱(chēng)為過(guò)渡階段;
③T1+1~T1+T2-b2
在本階段,與上個(gè)階段相比,數(shù)據(jù)特征減少,特征S2,S3得到繼承,特征S1消失.
上述場(chǎng)景可以抽象為一個(gè)特征繼承性增減的在線二分類(lèi)問(wèn)題.在本文中用{xt,t=1,2,…,T1+T2-b2}表示序貫接收的樣本,其中xt∈dt,表示xt是一個(gè)dt維的行向量.wt是t-1輪迭代后得到的分類(lèi)器.在t=T1-b1+1時(shí),新增特征出現(xiàn),為了對(duì)歷史特征和新增特征加以區(qū)別,文中用表示原始特征組成的向量,表示新增特征組成的向量,原始特征是樣本xt在x1特征空間上的投影,新增特征是樣本xt的剩余部分,即其中分類(lèi)器w做同樣的劃分,用yt表示樣本xt的真實(shí)標(biāo)簽,表示分類(lèi)器的預(yù)測(cè)結(jié)果.
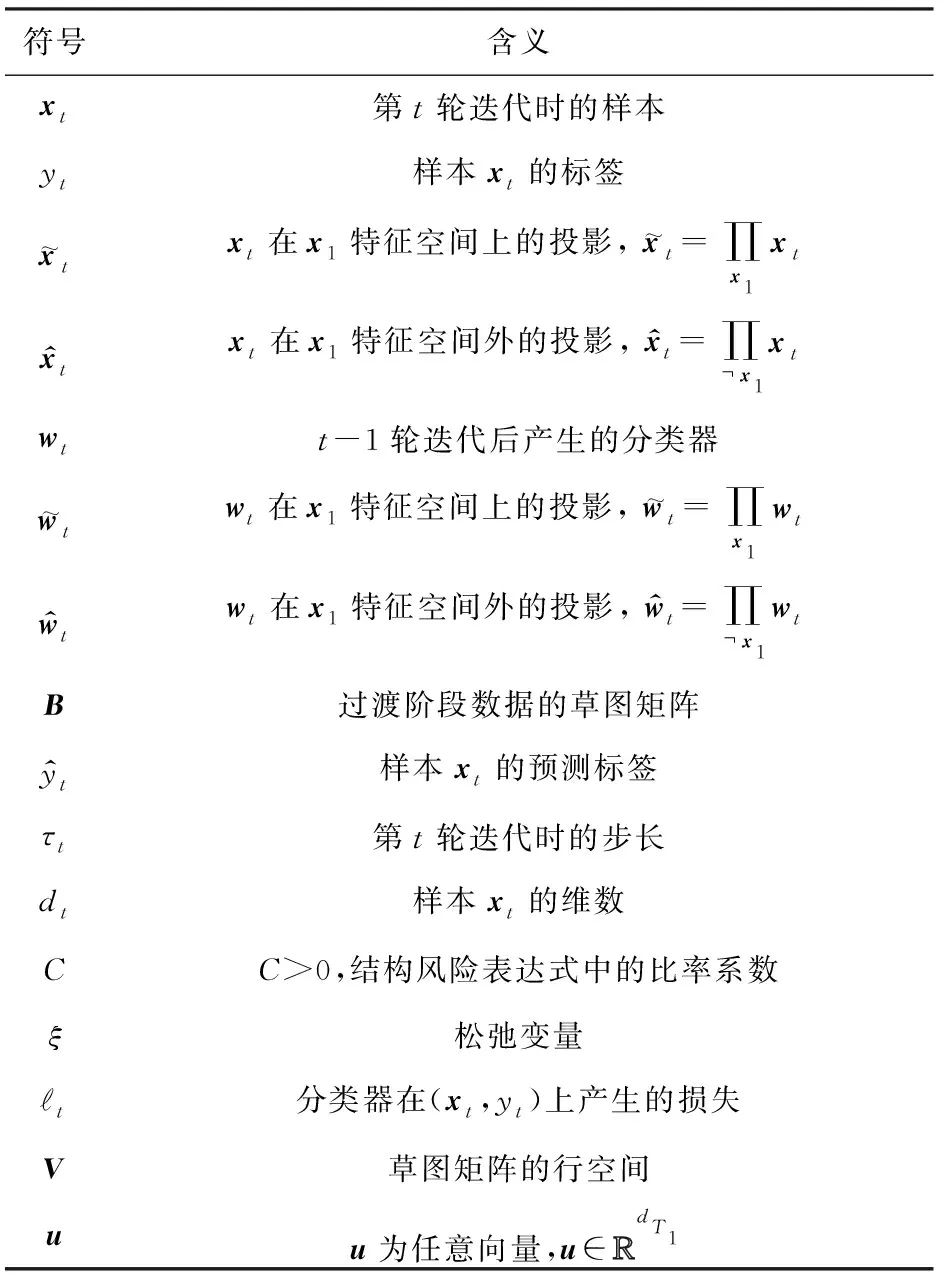
Table 1 Notations and Descriptions表1 符號(hào)及其含義
2.2 OFID算法
觀察特征的演化規(guī)律可以發(fā)現(xiàn)算法有2個(gè)最主要的問(wèn)題需要解決,主要問(wèn)題1:在T1-b1+1~T1階段,新的特征S3出現(xiàn),加入訓(xùn)練會(huì)對(duì)第1階段訓(xùn)練得到的分類(lèi)器產(chǎn)生影響;T1-b1+1~T1階段維持時(shí)間較短,數(shù)據(jù)數(shù)少,如何設(shè)計(jì)更新策略、在初期攜帶新特征的數(shù)據(jù)不足的情況下進(jìn)行較為準(zhǔn)確的訓(xùn)練是一個(gè)問(wèn)題.主要問(wèn)題2:在T1+1~T1+T2-b2階段,特征S1消失,只利用具有相同特征空間的數(shù)據(jù)進(jìn)行模型訓(xùn)練,對(duì)應(yīng)缺失維度的信息就會(huì)丟失,造成信息的浪費(fèi),降低預(yù)測(cè)準(zhǔn)確率.既要盡可能的減少信息的損失,保證預(yù)測(cè)準(zhǔn)確率,又要適應(yīng)周期內(nèi)特征空間的增減變化,這是算法需要解決的技術(shù)重點(diǎn),針對(duì)特征繼承性增減的在線分類(lèi)場(chǎng)景,本文提出面向特征繼承性增減的在線分類(lèi)算法OFID及其2種變體.對(duì)于問(wèn)題1,算法的策略是在第2階段更新時(shí)引入新分類(lèi)器對(duì)新增特征進(jìn)行學(xué)習(xí),但盡量維持上個(gè)階段分類(lèi)器的權(quán)重.歷史模型在原始特征的多輪迭代上得到了充分訓(xùn)練,具有較高的置信度,因此采用維持原有分類(lèi)器的更新策略,進(jìn)行上述處理,模型可能會(huì)增加對(duì)舊特征的依賴,對(duì)于該問(wèn)題,OFID算法在下個(gè)處理過(guò)程中,放棄了對(duì)于舊特征的恢復(fù),只對(duì)新分類(lèi)器進(jìn)行訓(xùn)練,在一定程度上避免了模型對(duì)舊特征的依賴,達(dá)到了充分?jǐn)M合新特征的目的;對(duì)于問(wèn)題2,本文采用FD算法對(duì)矩陣進(jìn)行補(bǔ)全.補(bǔ)全后的數(shù)據(jù)矩陣可以采用已有的成熟技術(shù)進(jìn)行在線分類(lèi).
本文在第1部分采取PA算法進(jìn)行模型更新,因?yàn)镻A算法具有十分顯著的優(yōu)點(diǎn):1)PA算法是在線學(xué)習(xí)任務(wù)中應(yīng)用十分廣泛的算法,具有良好的收斂速度;2)PA算法在保證良好學(xué)習(xí)性能的前提下,具有較快的運(yùn)行速率;3)利用PA算法可以使OFID算法具有良好的理論保證.因此本文使用PA算法進(jìn)行模型更新.
本場(chǎng)景下數(shù)據(jù)呈現(xiàn)明顯的特征增減規(guī)律,在1~T1-b1時(shí)間段內(nèi),特征空間保持不變,本階段內(nèi)第t輪迭代時(shí),PA算法滿足的優(yōu)化表達(dá)式為
(1)

(2)

以上處理解決了特征增加時(shí)分類(lèi)器對(duì)新增特征的適應(yīng)問(wèn)題。然而,在T1+1~T1+T2-b2階段,特征S1消失,數(shù)據(jù)矩陣出現(xiàn)了缺失.為了繼續(xù)使用和訓(xùn)練原有分類(lèi)器,算法選擇利用過(guò)渡階段的完整數(shù)據(jù)進(jìn)行矩陣補(bǔ)全.
在傳統(tǒng)特征變化的研究中[26,31],通常采用新特征來(lái)補(bǔ)全舊特征,達(dá)到挖掘新舊特征之間的關(guān)系的目的.然而,本文研究的特征繼承性增減的實(shí)際應(yīng)用場(chǎng)景中,下一時(shí)刻數(shù)據(jù)哪些特征會(huì)發(fā)生缺失無(wú)法事先確定,難以通過(guò)學(xué)習(xí)新舊特征之間的關(guān)系來(lái)對(duì)消失的舊特征進(jìn)行補(bǔ)全.因此,本論文采取FD算法進(jìn)行補(bǔ)全,F(xiàn)D算法的基本思路是尋找出現(xiàn)頻率高的向量作為一組基來(lái)補(bǔ)全數(shù)據(jù)矩陣,將單個(gè)的數(shù)據(jù)樣本作為整體來(lái)處理,可以很好地解決新舊特征不確定的問(wèn)題,對(duì)缺失特征進(jìn)行有效準(zhǔn)確的補(bǔ)全.
FD算法不考察特征之間的關(guān)系,其補(bǔ)全流程是建立一個(gè)r行的矩陣,最后一行設(shè)置為零向量,每一個(gè)樣本被接收后作為一個(gè)行向量替代掉矩陣中的零向量,然后對(duì)矩陣做SVD分解,將最小的奇異值剔除,繼續(xù)按照以上步驟操作,遍歷所有數(shù)據(jù).最終返回一個(gè)草圖矩陣.
T1-b1+1~T1階段接收到的樣本組成矩陣N,對(duì)矩陣N使用FD算法繪制秩為r的矩陣草圖B,記B的行向量為vi,i∈{1,2,…,r},構(gòu)成一個(gè)向量組,B的行空間記為V,利用V對(duì)T1+1~T1+T2-b2階段的缺失部分進(jìn)行補(bǔ)全.
在T1+1~T1+T2-b2階段的第t輪迭代,接收到樣本xt,在V中尋找一個(gè)向量zt,記zt∈V,該向量滿足:
(3)

(4)
(5)
(6)
第2個(gè)是ξ的平方形式:
(7)
(8)
以此形成2種變體算法OFID -Ⅰ與OFID -Ⅱ,它們是OFID算法的軟間隔形式.
傳統(tǒng)的在線學(xué)習(xí)算法每次接收一個(gè)數(shù)據(jù)就進(jìn)行模型的更新,因此具有運(yùn)行速度快、存儲(chǔ)空間要求小等優(yōu)點(diǎn),而本文提出的OFID系列算法每次接收一個(gè)數(shù)據(jù)就進(jìn)行分類(lèi)器的更新,具有傳統(tǒng)在線學(xué)習(xí)算法的優(yōu)點(diǎn),屬于典型的在線學(xué)習(xí)算法.但由于本文的核心研究?jī)?nèi)容是特征繼承性增減這一特殊場(chǎng)景,作者在傳統(tǒng)的在線學(xué)習(xí)算法上做出了改進(jìn),提高了算法對(duì)特征繼承性增減變化的適應(yīng)能力,增強(qiáng)了算法在該場(chǎng)景下的分類(lèi)能力.
2.3 優(yōu)化問(wèn)題求解
(9)
其中τ是拉格朗日乘數(shù),將w的表達(dá)式代入L(w,τ),進(jìn)一步有:
(10)
式(10)對(duì)τ求導(dǎo),令其等于0,得到wt+1的閉式解:
(11)
優(yōu)化問(wèn)題式(2)的求解與問(wèn)題式(1)的求解類(lèi)似,使用拉格朗日乘子法,有:
(12)

(13)
式(13)對(duì)τ求導(dǎo),令其等于0,得到wt+1的閉式解:
(14)
繼續(xù)使用拉格朗日乘子法對(duì)優(yōu)化問(wèn)題式(5)~(8)進(jìn)行求解,得到2個(gè)變體算法統(tǒng)一的更新方式,
(15)
其中,
(16)
綜合以上求解過(guò)程,3種算法具有統(tǒng)一的更新形式:
OFID算法及其他2種變體算法的偽代碼如下所示:
算法1.OFID算法及其變體.
輸入:參數(shù)C>0;
輸出:1~T1+T2-b2階段內(nèi)預(yù)測(cè)正確的樣本數(shù)量、草圖矩陣B.
初始化:w1=(0,…,0)∈d1;
fort=1,2,…,T1do
① 接收樣本xt;

yt(w·xt)},wt與xt維度相同時(shí);
wt與xt維度不同時(shí).
④ 接收標(biāo)簽yt;
⑤ 計(jì)算步長(zhǎng)τt;
⑥ 利用算法2訓(xùn)練草圖矩陣B;
⑦ 更新分類(lèi)器:
end
fort=T1+1,…,T1+T2-b2-1 do
⑨ 重復(fù)步驟②③④⑤⑦
end
算法1中采用了Frequent-Directions學(xué)習(xí)草圖矩陣,其算法偽代碼為:
算法2.Frequent-Directions.
輸出:草圖矩陣B;
初始化:B=0r×dT1.
fort=T1-b1+1,…,T1do
①Br←xt;
② [U,Σ,V]←SVD(B);
③N←ΣVT;

end
3 算法分析
本節(jié)對(duì)OFID系列算法的損失進(jìn)行討論與證明,在理論上保證算法的有效性和可靠性.本節(jié)用到了3個(gè)引理、3個(gè)定理.引理1用于說(shuō)明FD算法在條件滿足的情況下可以精確地對(duì)矩陣進(jìn)行補(bǔ)全;引理2,3與定理1用于說(shuō)明數(shù)據(jù)集線性可分情況下OFID算法Hinge損失平方和有上界;定理2用于說(shuō)明算法OFID -Ⅰ犯錯(cuò)總數(shù)有上界;定理3用于說(shuō)明算法OFID -Ⅱ的Hinge損失平方和有上界.

引理1.在算法2中,對(duì)矩陣B做SVD分解,B=UΣVT,令r∈{min(T1-b,d1)},即r是草圖矩陣B的秩,并且有U=(u1,u2,…,ur)∈(T1-b)×r,V=(v1,v2,…,vr)∈(T1-b)×r,記和是矩陣B的前r個(gè)左右奇異向量.定義:
若滿足s≥7μ(r)rln(rb1/δ),s為消失特征的維數(shù),則在至少1-δ的概率下算法可以將矩陣精確地進(jìn)行恢復(fù).
證明.引理1的詳細(xì)證明可參考文獻(xiàn)[18].
引理2[14].記(xt,yt),t=1,2,…,T為序貫接收的流式數(shù)據(jù),其中xt∈dt,yt∈{-1,+1},數(shù)據(jù)的維數(shù)滿足dt-1≤dt,步長(zhǎng)損失t采用Hinge損失,則對(duì)任意向量u∈dT,有:

(17)
即:
下面對(duì)單項(xiàng)的?t進(jìn)行估計(jì).在t=0時(shí),τt=0,有又dwt≤dwt+1,則有:
(18)

(19)
式(19)兩邊對(duì)t累加,可得:
(20)
證畢.
引理3[14].記(xt,yt),t=1,2,…,T為序貫接收的流式數(shù)據(jù),其中xt∈dt,yt∈{-1,+1},dt-1≤dt并且對(duì)所有t均成立;假設(shè)存在分類(lèi)器u∈dT,在任意一次迭代中滿足則有:
(21)
(22)
證畢.
定理1.記(xt,yt),t=1,2,…,T1+T2-b2為序貫接收的流式數(shù)據(jù),其中xt∈dt,yt∈{-1,+1},補(bǔ)全后的樣本滿足對(duì)所有t均成立;分類(lèi)器滿足對(duì)所有t均成立;假設(shè)存在分類(lèi)器u∈dT,對(duì)補(bǔ)全后的矩陣,對(duì)任意的t滿足令R=max{R1,R2},則有:
證明.令:

?t對(duì)t進(jìn)行累加,得到:
證畢.
定理2.記(xt,yt),t=1,2,…,T1+T2-b2為序貫接收的流式數(shù)據(jù),其中xt∈dt,yt∈{-1,+1},補(bǔ)全后的樣本滿足對(duì)所有t均成立,則對(duì)于任意向量u∈dT1,算法OFID -Ⅰ犯錯(cuò)次數(shù)的一個(gè)上界為
證明.令

代入后得到式(21)中,得到:
整理后得到:
證畢.
定理2說(shuō)明了算法OFID -Ⅰ在恢復(fù)出的樣本有界時(shí),犯錯(cuò)總數(shù)存在上界.
定理3.記(xt,yt),t=1,2,…,T1+T2-b2為序貫接收的流式數(shù)據(jù),其中xt∈dt,yt∈{-1,+1},補(bǔ)全后的樣本滿足對(duì)所有t均成立,則對(duì)于任意向量u,u∈dT1,有:
證明.通過(guò)引理2已知:
(23)

(24)
將τt的定義代入,有:
通過(guò)定理3,在理論上驗(yàn)證了OFID -Ⅱ算法的Hinge損失平方和有上界.
證畢.
4 實(shí) 驗(yàn)
本節(jié)通過(guò)數(shù)值仿真實(shí)驗(yàn)來(lái)驗(yàn)證OFID算法及其2種變體的表現(xiàn).首先介紹實(shí)驗(yàn)設(shè)置及數(shù)據(jù)集.
本節(jié)共設(shè)置4組實(shí)驗(yàn),組1實(shí)驗(yàn)為主試驗(yàn),進(jìn)行OFID系列算法與FESL-c,F(xiàn)ESL-s,PUFE算法的對(duì)比,使用預(yù)測(cè)準(zhǔn)確率作為指標(biāo),觀察OFID系列算法在具體數(shù)據(jù)集上的表現(xiàn),驗(yàn)證OFID算法的有效性和可靠性;組2實(shí)驗(yàn)為參數(shù)實(shí)驗(yàn),以預(yù)測(cè)錯(cuò)誤率為指標(biāo),考察2種變體算法的參數(shù)敏感性以及添加松弛變量的效果;組3實(shí)驗(yàn)為算法時(shí)間復(fù)雜的實(shí)驗(yàn),指標(biāo)為時(shí)間,用來(lái)考察算法的時(shí)間復(fù)雜度.組4實(shí)驗(yàn)為輔助實(shí)驗(yàn),指標(biāo)為算法的預(yù)測(cè)正確率,在3個(gè)不同的迭代階段分別記錄并進(jìn)行對(duì)比,驗(yàn)證OFID算法在不同迭代階段的有效性.
實(shí)驗(yàn)數(shù)據(jù)要求具有動(dòng)態(tài)的特征空間,為滿足這一要求,對(duì)特征空間進(jìn)行了劃分,劃分的樣式如圖1所示,每個(gè)數(shù)據(jù)集的特征隨機(jī)進(jìn)行排序,近似均分為3部分;在場(chǎng)景設(shè)置中T1-b1+1~T1階段維持時(shí)間較短,在劃分?jǐn)?shù)據(jù)集時(shí)遵循了這一設(shè)定,過(guò)渡階段的數(shù)據(jù)量占比設(shè)置為1/10,階段1的數(shù)據(jù)比例與缺失數(shù)據(jù)的比例等同,我們按照以上規(guī)則對(duì)數(shù)據(jù)集進(jìn)行劃分.
每次實(shí)驗(yàn)每個(gè)數(shù)據(jù)集重復(fù)20次,每次重復(fù)隨機(jī)打亂數(shù)據(jù)的順序,并使用20次結(jié)果的平均值作為指標(biāo)的最終值.參數(shù)實(shí)驗(yàn)中,總共進(jìn)行9次調(diào)參,參數(shù)C的選擇范圍為10-4~104,參數(shù)C的每次變化倍率為10.
本文在公開(kāi)數(shù)據(jù)集上進(jìn)行實(shí)驗(yàn),包括Cancer,air,WDBC,warpPIE,WBC,Haberman,Wine,Thyroid,Seeds共9個(gè)數(shù)據(jù)集,這些數(shù)據(jù)集分布在多個(gè)領(lǐng)域.數(shù)據(jù)集的情況如表2所示:
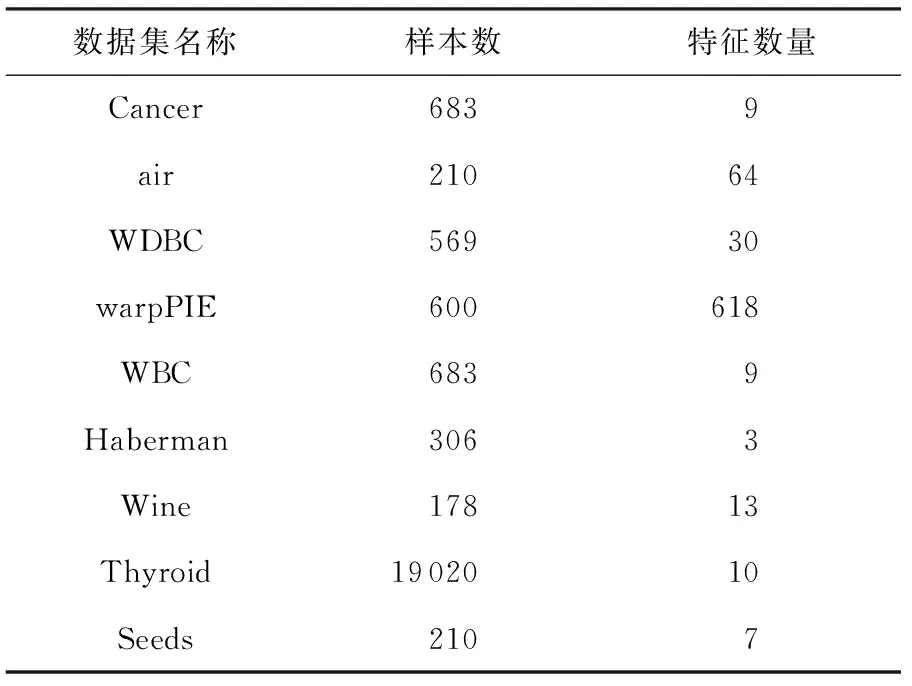
Table 2 The Datasets Used in the Experiments表2 實(shí)驗(yàn)中用到的數(shù)據(jù)集
4.1 OFID系列算法與FESL,PUFE算法的對(duì)比實(shí)驗(yàn)

表3展示了6種算法在不同數(shù)據(jù)集上的最終預(yù)測(cè)準(zhǔn)確率.在大多數(shù)數(shù)據(jù)集上,OFID系列算法與其他算法相比有著較高的預(yù)測(cè)準(zhǔn)確率,說(shuō)明OFID系列算法較好地適應(yīng)了數(shù)據(jù)特征的動(dòng)態(tài)變化,具有現(xiàn)實(shí)應(yīng)用的價(jià)值.但是一個(gè)學(xué)習(xí)過(guò)程中,3個(gè)階段的數(shù)據(jù)的特征有較大的差異,因此最終的預(yù)測(cè)準(zhǔn)確率并不足以概括在整個(gè)學(xué)習(xí)過(guò)程各個(gè)算法的表現(xiàn).為更加直觀地觀察算法在各個(gè)階段的表現(xiàn),本文選取預(yù)測(cè)錯(cuò)誤率作為指標(biāo),觀察6種算法在學(xué)習(xí)過(guò)程中預(yù)測(cè)錯(cuò)誤率的動(dòng)態(tài)變化,實(shí)驗(yàn)結(jié)果如圖2所示.
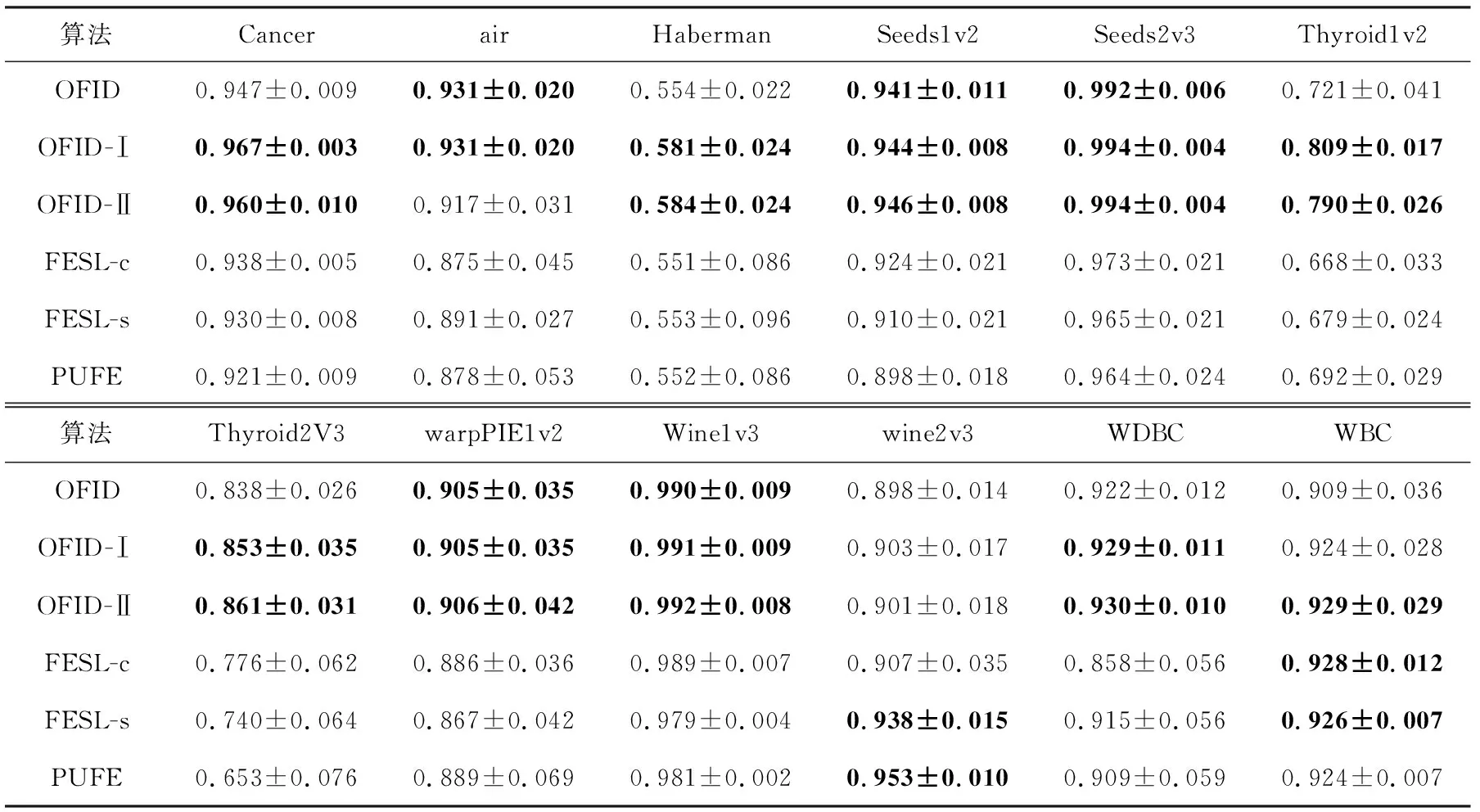
Table 3 Prediction Accuracy of Six Algorithms on Different Datasets表3 6種算法在不同數(shù)據(jù)集上的預(yù)測(cè)準(zhǔn)確率
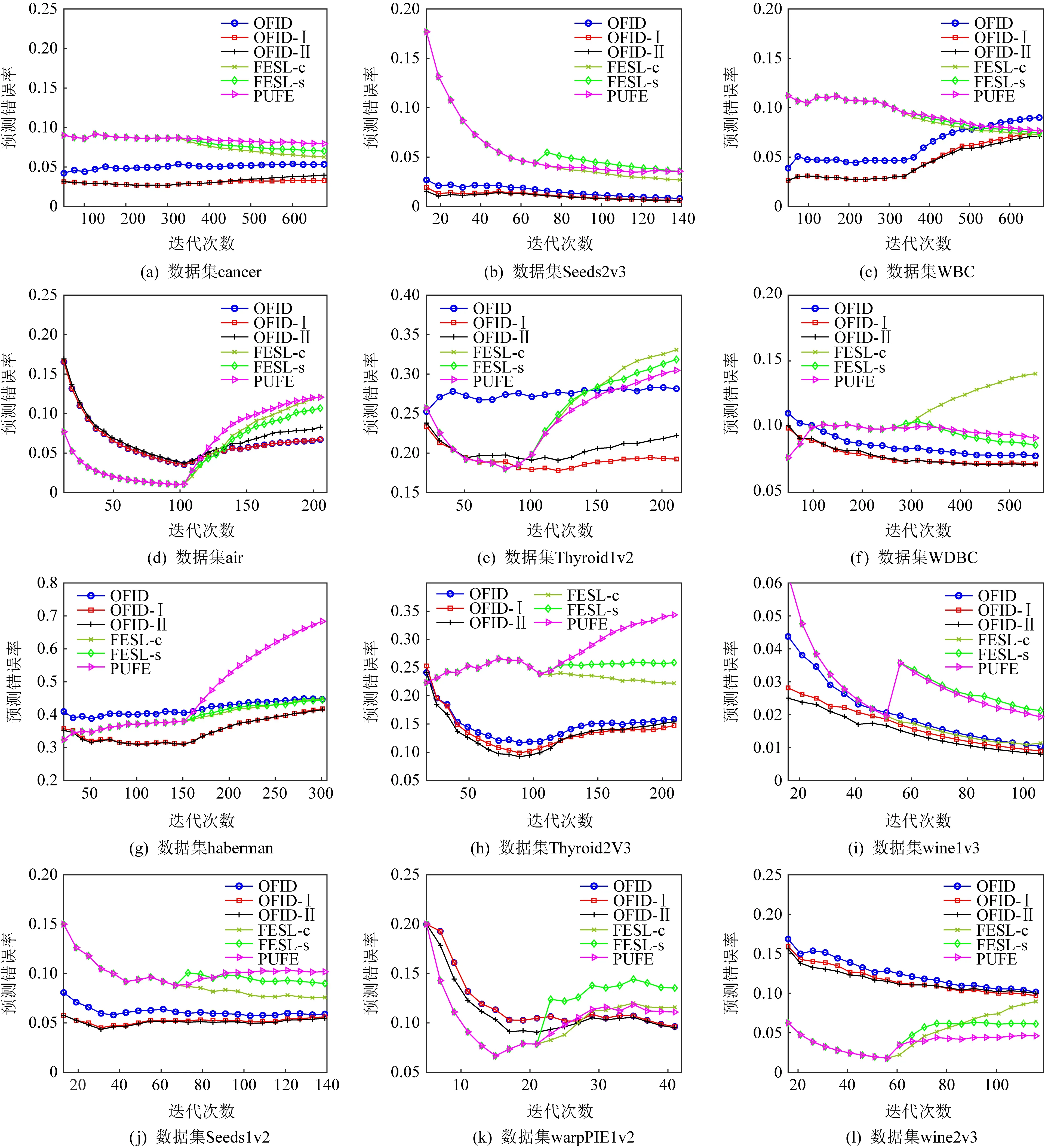
Fig. 2 Prediction wrong rates of six algorithms on different datasets圖2 6種算法在不同數(shù)據(jù)集上的預(yù)測(cè)錯(cuò)誤率
圖2是6種算法在數(shù)據(jù)集上預(yù)測(cè)錯(cuò)誤率隨時(shí)間的變化情況,橫坐標(biāo)是迭代次數(shù),縱坐標(biāo)是平均預(yù)測(cè)錯(cuò)誤率.OFID -Ⅰ,OFID -Ⅱ在大多數(shù)數(shù)據(jù)集上表現(xiàn)優(yōu)于算法OFID.說(shuō)明軟間隔形式取得了應(yīng)有的設(shè)計(jì)效果,降低了對(duì)噪聲的敏感程度,提高了算法性能.
在大多數(shù)數(shù)據(jù)集上,OFID -Ⅰ(紅色)、OFID -Ⅱ(黑色)算法表現(xiàn)最好,算法OFID(藍(lán)色)次之,表現(xiàn)優(yōu)于其他3種算法,說(shuō)明OFID系列算法具有實(shí)際應(yīng)用的價(jià)值,該實(shí)驗(yàn)驗(yàn)證了算法的有效性.
算法FESL,PUFE在數(shù)據(jù)集Wine上表現(xiàn)較OFID更好.在其余數(shù)據(jù)集上,OFID系列算法表現(xiàn)最優(yōu).對(duì)于上述實(shí)驗(yàn)結(jié)果進(jìn)行觀察,會(huì)發(fā)現(xiàn)1~T1-b1階段的預(yù)測(cè)正確率對(duì)算法FESL,PUFE的整體表現(xiàn)有重要的影響,F(xiàn)ESL,PUFE的整體表現(xiàn)優(yōu)于OFID系列算法時(shí)在1~T1-b1階段的預(yù)測(cè)優(yōu)于OFID系列算法.

4.2 參數(shù)實(shí)驗(yàn)
在本節(jié)進(jìn)行參數(shù)實(shí)驗(yàn),評(píng)價(jià)指標(biāo)為20次實(shí)驗(yàn)的平均預(yù)測(cè)正確率,觀察參數(shù)變化對(duì)實(shí)驗(yàn)結(jié)果的影響,考察OFID系列算法對(duì)參數(shù)C的敏感程度,圖3為參數(shù)實(shí)驗(yàn)的具體結(jié)果,橫坐標(biāo)為參數(shù)C的數(shù)值,參數(shù)C的范圍為10-4~104,縱坐標(biāo)為平均預(yù)測(cè)正確率.OFID算法無(wú)參數(shù),不受參數(shù)變化影響,形成實(shí)驗(yàn)的固定參照;觀察圖3,隨著參數(shù)C的變動(dòng),可以發(fā)現(xiàn)OFID -Ⅰ,OFID -Ⅱ的預(yù)測(cè)正確率隨之產(chǎn)生了一定程度的波動(dòng).參數(shù)過(guò)小時(shí),OFID算法與OFID -Ⅰ,OFID -Ⅱ算法之間的預(yù)測(cè)正確率存在差距,但隨著參數(shù)C逐漸增大,3種算法準(zhǔn)確率之間的差距先增大后減小,最后趨同.
從優(yōu)化問(wèn)題的結(jié)構(gòu)來(lái)分析出現(xiàn)圖中變化趨勢(shì)的原因,參數(shù)C調(diào)節(jié)的是優(yōu)化表達(dá)式中松弛變量與分類(lèi)器變化2部分的比率,當(dāng)C增大時(shí),要最小化優(yōu)化問(wèn)題式(5)~(8),代表著松弛條件收緊,對(duì)應(yīng)的ξ值變小,損失降低,對(duì)數(shù)據(jù)的敏感性提高,隨著參數(shù)C增大,2種變體算法逐漸向沒(méi)有松弛變量的OFID算法靠攏,分析結(jié)果剛好與圖3的實(shí)驗(yàn)結(jié)果對(duì)應(yīng).
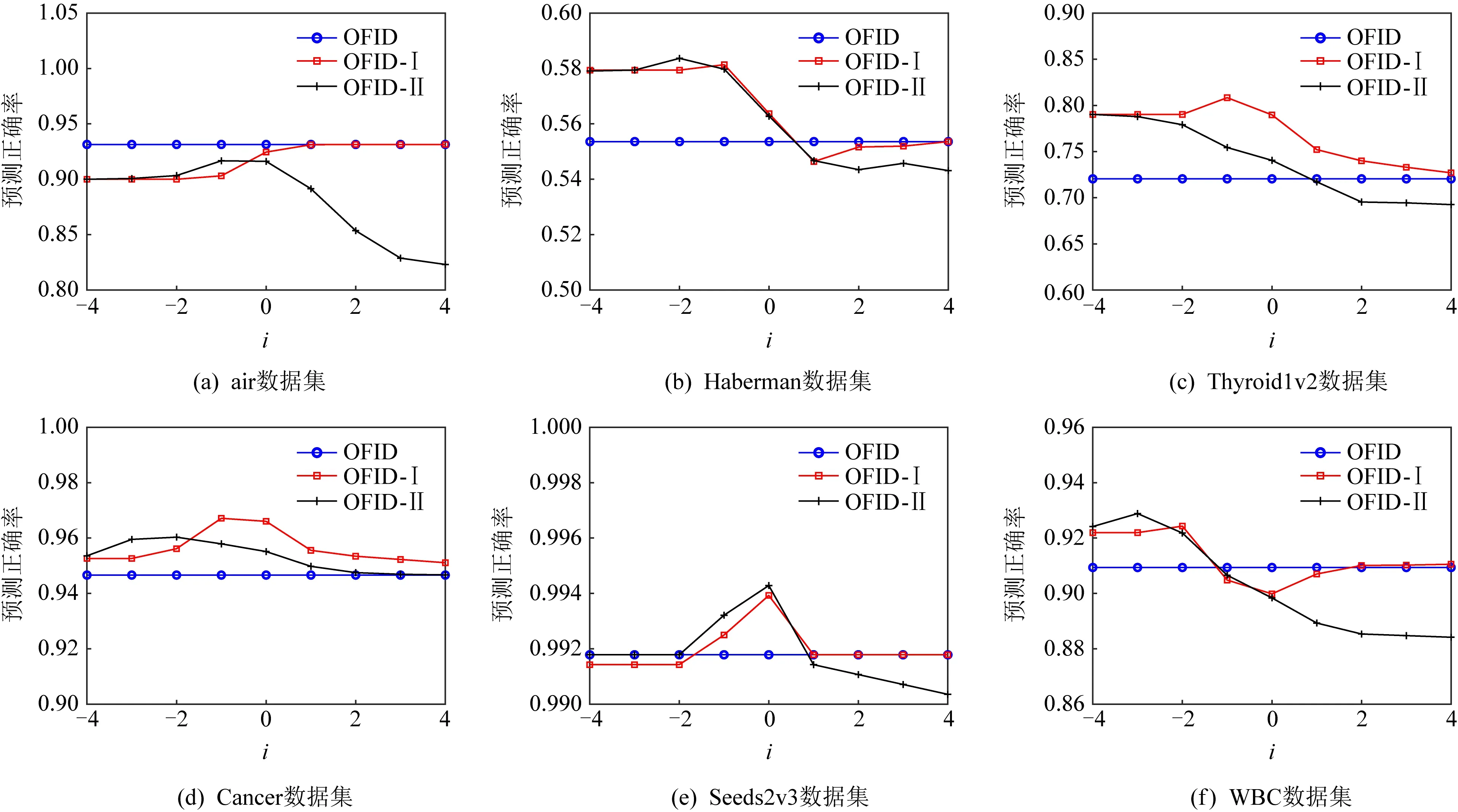
Fig. 3 The average rates of right predictions with respect to C=10i圖3 C=10i對(duì)平均預(yù)測(cè)正確率的影響
4.3 算法的時(shí)間復(fù)雜的實(shí)驗(yàn)
本節(jié)實(shí)驗(yàn)中,評(píng)價(jià)算法計(jì)算復(fù)雜度的指標(biāo)為算法得到預(yù)測(cè)結(jié)果的運(yùn)行時(shí)間.6種算法在不同數(shù)據(jù)集上的運(yùn)行時(shí)間如表4所示.
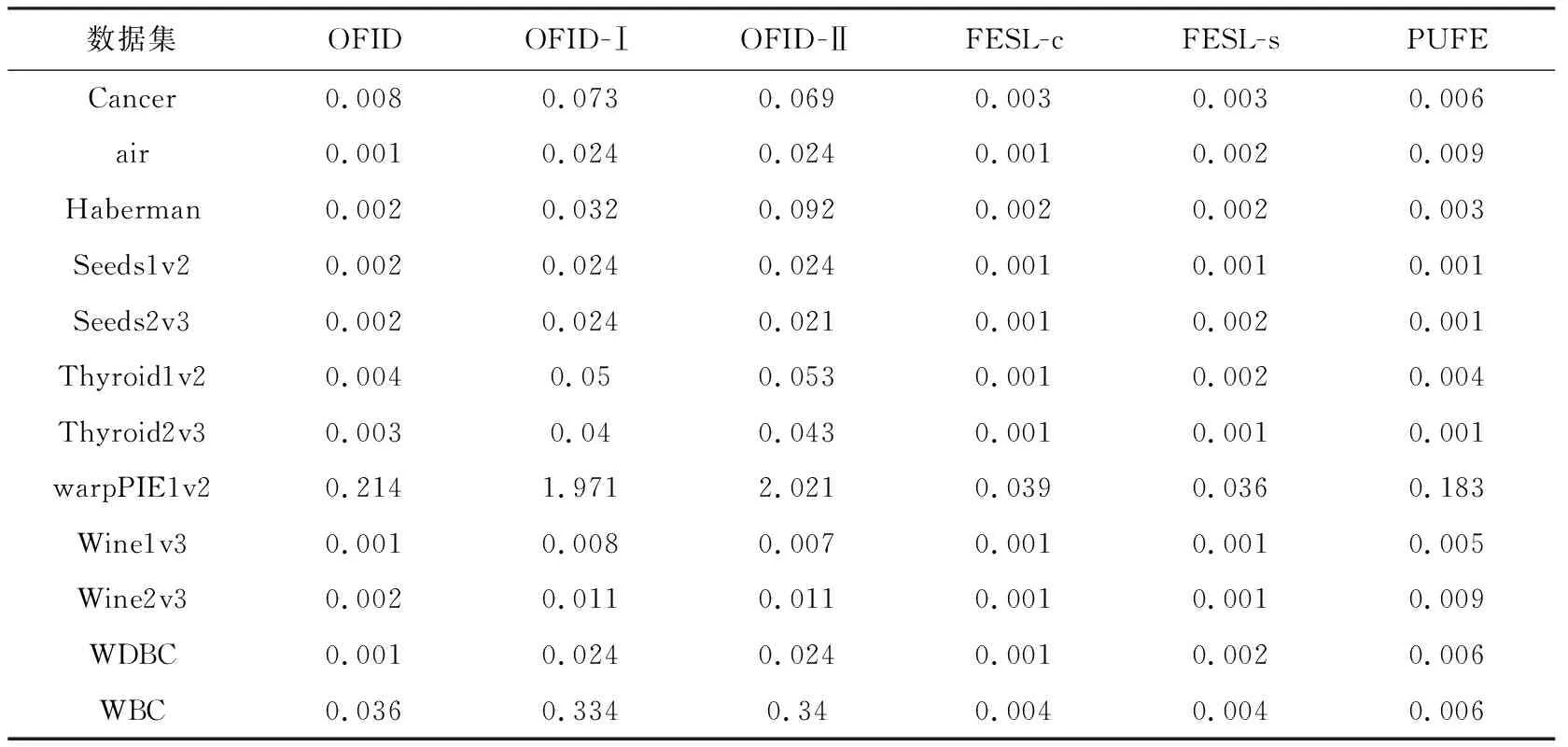
Table 4 Running Time of Different Algorithms on Different Datasets表4 不同算法在不同數(shù)據(jù)集的運(yùn)行時(shí)間 s
6種算法的更新表達(dá)式在形式上并無(wú)本質(zhì)上的不同,均為線性迭代算法,區(qū)別只在于每一步迭代中使用的系數(shù),這并不會(huì)有時(shí)間消耗上的顯著差異,因此,復(fù)雜度存在差異的主要原因在于矩陣補(bǔ)全的方式.OFID系列算法與PUFE算法均使用FD算法進(jìn)行補(bǔ)全,F(xiàn)ESL算法在過(guò)渡階段訓(xùn)練一個(gè)線性映射進(jìn)行補(bǔ)全,這涉及到了矩陣的求逆運(yùn)算.這也是時(shí)間消耗的主要部分.
表4中OFID -Ⅰ與OFID -Ⅱ算法的運(yùn)行時(shí)間明顯高于其他算法,這是因?yàn)檫@2種算法需要進(jìn)行參數(shù)的調(diào)節(jié),每得到一個(gè)調(diào)參后的預(yù)測(cè)結(jié)果,算法需要運(yùn)算9次,平均得到一個(gè)結(jié)果的時(shí)間與其他算法相當(dāng);OFID算法與FESL算法、PUFE算法在時(shí)間消耗上相當(dāng),具有相同的計(jì)算復(fù)雜度.
4.4 分階段預(yù)測(cè)實(shí)驗(yàn)
本節(jié)實(shí)驗(yàn)中選取4個(gè)數(shù)據(jù)集,觀測(cè)指標(biāo)為OFID系列算法與其他3種對(duì)比算法在3個(gè)不同階段的平均預(yù)測(cè)準(zhǔn)確率,預(yù)測(cè)結(jié)果取階段結(jié)束時(shí)算法的平均預(yù)測(cè)準(zhǔn)確率,具體的實(shí)驗(yàn)結(jié)果如圖4所示.觀察實(shí)驗(yàn)結(jié)果,可以發(fā)現(xiàn)OFID系列算法在迭代的3個(gè)階段里均有優(yōu)異的表現(xiàn),這組輔助實(shí)驗(yàn)充分說(shuō)明了OFID系列算法在不同迭代階段均具有良好的分類(lèi)性能.
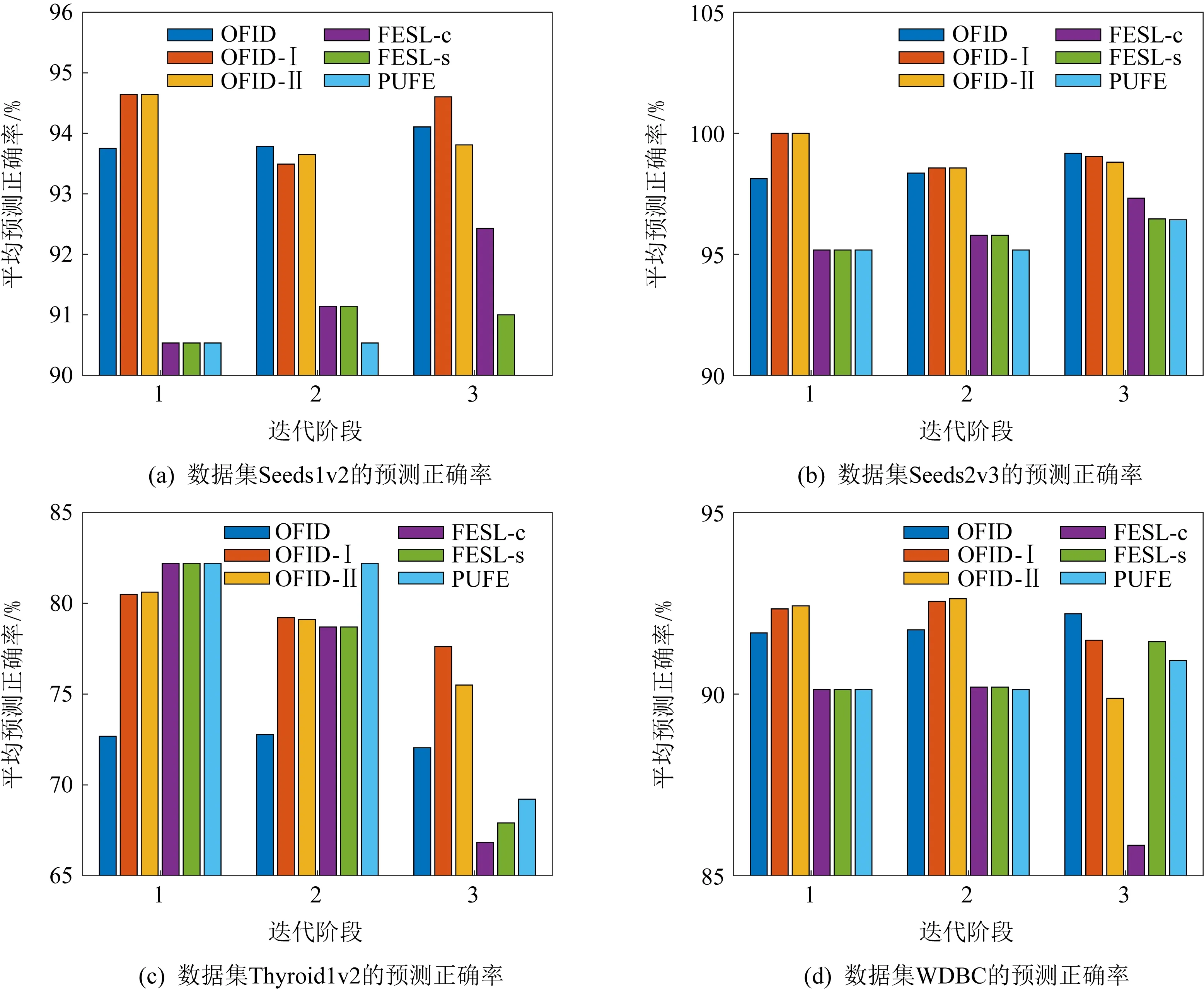
Fig. 4 The average prediction accuracy of the algorithm in three periods圖4 3個(gè)迭代階段中算法的平均預(yù)測(cè)準(zhǔn)確率
5 總結(jié)與展望
為解決數(shù)據(jù)流特征繼承性增減這一新的實(shí)際問(wèn)題,本文提出了一種面向特征繼承性增減的在線學(xué)習(xí)算法OFID及其2種變體OFID -Ⅰ與OFID -Ⅱ.當(dāng)新特征出現(xiàn)時(shí),通過(guò)結(jié)合在線PA算法與結(jié)構(gòu)風(fēng)險(xiǎn)最小化原則分別更新原始特征與新增特征上的分類(lèi)器;當(dāng)原始特征消失時(shí),對(duì)數(shù)據(jù)流使用Frequent-Directions算法對(duì)數(shù)據(jù)矩陣進(jìn)行補(bǔ)全,使得原始分類(lèi)器得以繼續(xù)更新迭代.理論分析和實(shí)驗(yàn)結(jié)果分析都驗(yàn)證了本文所提算法的有效性.
本文的對(duì)比方法中,有一些優(yōu)秀的思想可以進(jìn)行借鑒,例如對(duì)新舊分類(lèi)器分別進(jìn)行預(yù)測(cè)更新,互不干擾,預(yù)測(cè)標(biāo)簽來(lái)自新舊分類(lèi)器的預(yù)測(cè)結(jié)果進(jìn)行加權(quán),這樣不僅避免了分類(lèi)器對(duì)舊特征的過(guò)渡依賴,并且可以充分利用恢復(fù)出的信息,有著較高的研究?jī)r(jià)值,這將是未來(lái)工作中我們努力的一個(gè)方向.
本文所提的算法主要是針對(duì)線性場(chǎng)景下的分類(lèi)問(wèn)題,因此,將本文算法擴(kuò)展到非線性場(chǎng)景下是我們未來(lái)非常重要的一項(xiàng)工作.同時(shí),如何挖掘特征繼承性增減數(shù)據(jù)流的更多信息,例如二階信息、數(shù)據(jù)分布信息,以及如何對(duì)特征繼承性增減數(shù)據(jù)流進(jìn)行在線聚類(lèi)等也是值得關(guān)注的方向.因此,在未來(lái)的工作中我們將對(duì)上述內(nèi)容開(kāi)展更加深入的研究.
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(jí)(2024年2期)2024-05-15 02:02:28
小獼猴智力畫(huà)刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55