企業(yè)鐵路摘掛車數(shù)防錯預警方法的研究
2022-08-03 08:39:52柳增勝
山西冶金 2022年3期
李 斌, 柳增勝
(山西太鋼不銹鋼股份有限公司物流中心, 山西 太原 030003)
國內(nèi)大型內(nèi)陸冶金企業(yè)物流運輸大多依靠鐵路,鐵路調(diào)車作業(yè)一般都通過調(diào)度下達調(diào)車指令,現(xiàn)場調(diào)車人員根據(jù)指令摘掛相應的車數(shù)來完成,同時鐵路運輸系統(tǒng)也會根據(jù)指令的內(nèi)容來完成現(xiàn)車的跟蹤[1]。但是由于現(xiàn)場作業(yè)情況復雜,在摘掛車數(shù)較多的時候,存在調(diào)車人員數(shù)錯車的情況,從而導致信息系統(tǒng)計算出來的現(xiàn)車與現(xiàn)場實際現(xiàn)車不符的情況,如果不能及時發(fā)現(xiàn),下一次車輛調(diào)度將會將錯誤車輛信息帶到另一個股道上,多次操作后,錯誤將會無限放大,從而導致整個站場現(xiàn)車跟蹤混亂的情況。目前冶金企業(yè)對這種情況的解決辦法都停留在加強人員管控上,并未提出信息化的解決手段。本文提出了在摘掛車數(shù)與調(diào)車指令不符時,利用信息化手段進行防錯預警的方法。
1 冶金企業(yè)鐵路信息化架構(gòu)
1.1 目前國內(nèi)冶金企業(yè)鐵路信息化的建設情況
隨著信息技術(shù)的飛速發(fā)展,其在企業(yè)生產(chǎn)中也得到了廣泛應用,國內(nèi)大部分冶金企業(yè)鐵路運輸作業(yè)都實現(xiàn)了信息化的改造[2]。目前國內(nèi)冶金企業(yè)鐵路運輸信息化架構(gòu)大致類似,即L1 級別通過車號識別系統(tǒng)將進出廠車號傳輸給物流管理系統(tǒng),同時由機車定位系統(tǒng)和微機聯(lián)鎖系統(tǒng)實現(xiàn)現(xiàn)場機車和信號的管控;L2級別通過物流運輸管理系統(tǒng)和鐵路調(diào)車作業(yè)系統(tǒng)實現(xiàn)調(diào)車運輸作業(yè)的管控;L3 以及更高級別通過ERP、MES 系統(tǒng)、產(chǎn)銷一體等系統(tǒng),實現(xiàn)生產(chǎn)計劃、裝卸作業(yè)、廠內(nèi)運輸、廠外發(fā)運、結(jié)算等環(huán)節(jié)的管控。
1.2 冶金企業(yè)鐵路車輛跟蹤原理
由于鐵路車輛每日進出廠車數(shù)較多,無法逐車安裝定位系統(tǒng)進行跟蹤,且逐車安裝電子標簽的實施難度和費用較高,所以現(xiàn)場車輛的跟蹤依靠調(diào)車作業(yè)計劃來實現(xiàn)[3],其現(xiàn)車跟蹤原理如圖1 所示。
從圖1 中可看出,15 線有5 輛車,18 線無車,調(diào)車指令為:0318 機車在15 線掛5 車,此時現(xiàn)場作業(yè)完成以后,調(diào)車人員會利用手持設備確認調(diào)車指令完成,在鐵路術(shù)語中叫“清鉤”,當物流管理系統(tǒng)收到“清鉤”指令以后,會將現(xiàn)車信息根據(jù)調(diào)車指令內(nèi)容進行變更,如圖1 中,將15 線5 車的信息改變至機車位置,代表這5 車目前掛在機車0318 上。第二個調(diào)車指令為:0318 機車在18 線摘5 車,當現(xiàn)場調(diào)車人員確認指令完成以后,物流管理系統(tǒng)系統(tǒng)根據(jù)完成情況,將這5 車的信息更新至18 線。利用這樣的方法,實現(xiàn)了現(xiàn)場車輛的跟蹤。
1.3 車輛跟蹤存在的問題
上述利用“清鉤”和調(diào)車指令的計算方式跟蹤現(xiàn)車的辦法,是目前大部分冶金企業(yè)物流運輸管理系統(tǒng)采用的方法,該方法雖然能確定車輛的位置信息,但由于調(diào)車作業(yè)由現(xiàn)場調(diào)車人員操作,存在摘掛鉤車數(shù)與調(diào)車指令不符的情況。當調(diào)車員接收到調(diào)車指令以后(例如0001 機車;18 線;南;+50),首先會指揮機車司機進行車輛連接,當機車或者機車所掛的車輛和現(xiàn)場最南面第一個車連接完成以后,調(diào)車人員從18 線南面開始數(shù)50 個車,摘開車鉤,并告知機車司機指令完成,同時通過手持設備確認指令完成,系統(tǒng)則根據(jù)指令中50 車的信息將現(xiàn)車數(shù)據(jù)更新至機車上,調(diào)車員在數(shù)50 個車的過程中,因距離太遠(11 m×50=550 m)、車數(shù)較多、現(xiàn)場嘈雜或者其他影響,很容易數(shù)錯車,導致系統(tǒng)顯示的現(xiàn)車與現(xiàn)場車輛信息不符,如不能及時發(fā)現(xiàn)錯誤,這個錯誤將會影響下一個與錯車有相同機車或者股道的調(diào)車作業(yè)計劃,從而將錯誤無限放大,最終導致整個站場現(xiàn)車跟蹤混亂,甚至會因為系統(tǒng)顯示的不準確性,在上貨位卸車的重車中夾雜其他外發(fā)的重車,而引起安全事故。當發(fā)現(xiàn)車輛跟蹤信息與現(xiàn)場信息不符時,需要大量人員去現(xiàn)場核對,并且重新根據(jù)物流管理系統(tǒng)的現(xiàn)車車輛進行倒調(diào),嚴重影響鐵路調(diào)車的作業(yè)效率。
2 利用信息化技術(shù)計算現(xiàn)場列車摘掛錯誤的算法
2.1 基本原理
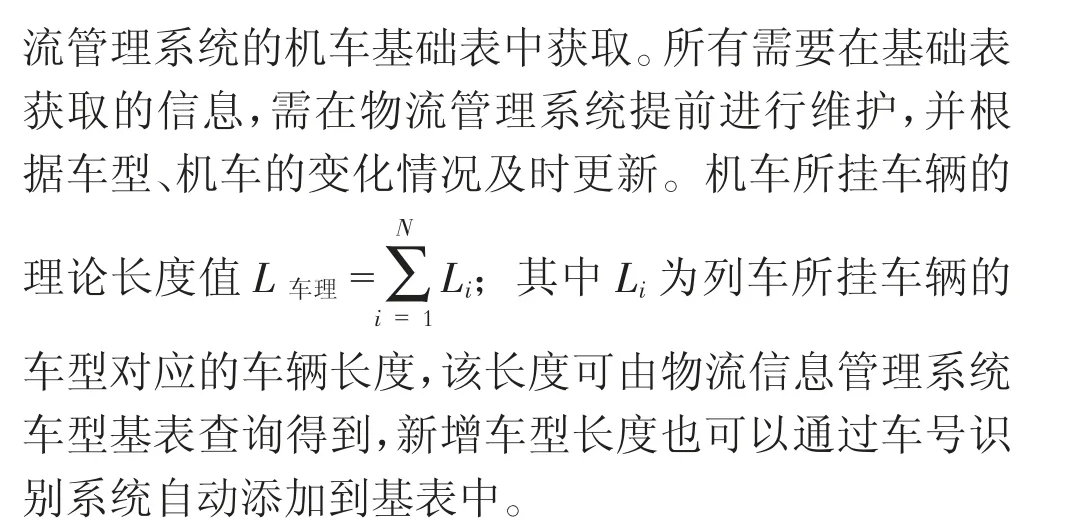
通過理論計算列車長度和實際長度之間的差值是否大于1 個車的長度(11 m),來判斷機車所摘掛車數(shù)是否與調(diào)車指令相符,列車在拉伸和擠壓過程中產(chǎn)生的誤差長度L 遠小于11 m,可以忽略不計。在實際操作中需要利用精準定位系統(tǒng)來確定機車的相對位置,利用微機聯(lián)鎖系統(tǒng)來確定機車所壓道岔的變化情況,具體如圖2 所示。

圖2 機車所掛車輛實際長度的算法

2.2 系統(tǒng)設計


圖3 系統(tǒng)設計流程圖
3 結(jié)語
在大型冶金企業(yè)物流信息化現(xiàn)有架構(gòu)的基礎(chǔ)上,利用物流管理系統(tǒng)中的基表信息,確定機車、車輛的長度等相對固定的信息;利用微機聯(lián)鎖的基表信息確定機車下一次經(jīng)過的軌道電路的長度信息;利用機車定位系統(tǒng)以及軌道電路的變化情況,確定機車剛壓上以及離開軌道電路的時間,然后通過計算理論長度與實際長度的差值,得出機車所掛車輛與系統(tǒng)顯示車輛是否一致。通過此次改進,可以在機車摘掛車數(shù)有誤的情況下,機車通過下一個軌道電路時及時報警,通知調(diào)車人員核對,及時發(fā)現(xiàn)錯誤,避免錯誤擴大時進行無效倒調(diào),從而提高調(diào)車效率,同時,也可以從根本上避免因現(xiàn)場錯誤導致重車上貨位車輛信息不符而引起的安全隱患。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
物流技術(shù)與應用(2019年8期)2019-09-04 03:29:56
汽車觀察(2018年12期)2018-12-26 01:05:44
測控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
故事大王(2016年7期)2016-09-22 17:30:08
現(xiàn)代企業(yè)(2015年2期)2015-02-28 18:45:09
商界(2014年12期)2014-04-29 00:44:03
機電信息(2014年27期)2014-02-27 15:53:56