激光甲烷遙測無人機及巡檢APP開發應用
2022-07-29 07:03:30劉金琦陳治宇
煤氣與熱力 2022年7期
1 概述
根據住建部《2020城市建設統計年鑒》,截至2020年,我國城市燃氣用氣人口達4.13×10
人,城市燃氣管道長度達到85×10
km。燃氣民用戶用氣安全是城市燃氣安全管理工作的重點,一旦泄漏容易引發燃氣火災和爆炸事故,造成重大人員傷亡和財產損失,且社會影響巨大。民用戶入戶安檢情況復雜,天津濱海東新燃氣有限公司歷年統計數據顯示,安檢入戶率在85%左右,無法入戶的比例為15%,再加上立管帶氣空房等并未列入日常安檢范圍,檢不到的比例實際更高。而使用手持激光遙測儀對高層用戶進行檢測時,容易因為在地面對戶內照射仰角太大造成數據不準或無法測到數據。
對于城中樓外管道和設施,在老舊小區、高層建筑常有通道封閉使巡檢人員無法到達近處檢查的情況。也有因裝修、改造、施工等原因將燃氣管道覆蓋、占壓的情況,存在諸多隱患。
(2) 本工程15萬t級航道只是對爛沙洋北水道水深較淺區域進行浚深,對工程區海域水動力及水道穩定性影響較小,工程后不會影響爛沙洋北、中、南三水道的整體流場格局。
對于郊外高中壓管道,有些穿過荒山野嶺、跨越沼澤湖泊等地區,有些處在高速公路護網內,人工巡檢難以進入。開發適應城市燃氣多種場景巡檢特點的微型激光甲烷遙測無人機和自動化巡檢方法,對提高巡檢質量、巡檢效率具有重要意義。
2 激光甲烷遙測無人機
2.1 TDLAS可調諧半導體激光吸收光譜檢測技術
可調諧半導體激光吸收光譜TDLAS(Tunable Diode Laser Absorption Spectroscopy)技術,其工作原理是在調制信號的控制下,激光模塊發出調制的激光探測光照射到探測區域,并由自然靶表面反射回來,由接收透鏡匯聚到光電轉換器進行光電轉換,轉換后的電信號經處理后得到被探測區域的氣體體積分數路徑積分,見圖1。氣體體積分數路徑積分指氣體體積分數對激光所通過的氣體云團長度的積分,單位為m。TDLAS技術是一種非接觸式檢測方法,與其他氣體檢測方法相比,具備靈敏度高、響應時間短、選擇性強、探測下限低等優點,這些特點對于無人機載條件下的動測量方式十分有利。

2.2 微型激光甲烷遙測模塊
微型激光甲烷遙測模塊(簡稱激光模塊)結構見圖2。激光發射器采用帶有半導體制冷的1 653.7 nm同軸封裝激光器,接收光路的球面聚焦透鏡直徑為25 mm,模塊質量為27.5 g。
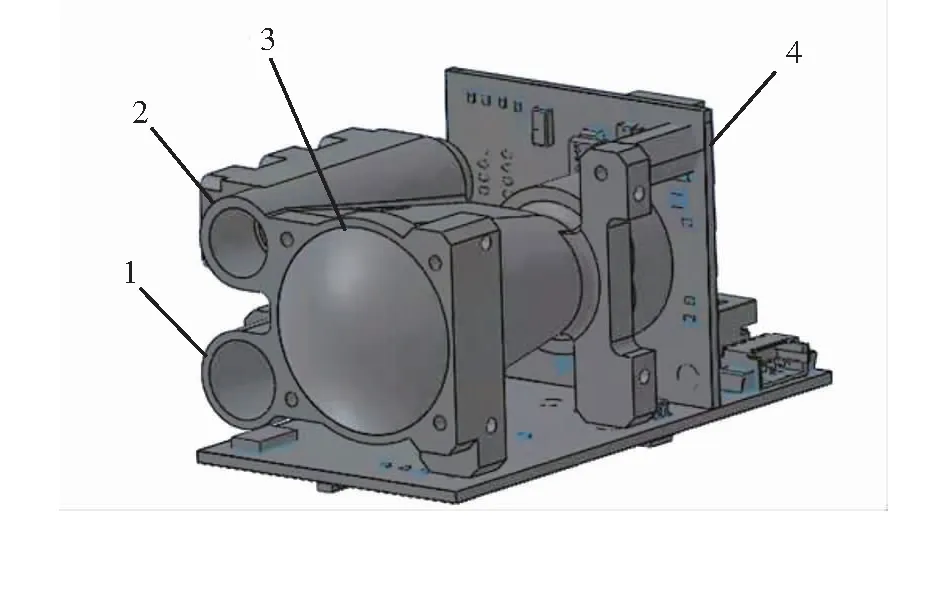
2.3 無人機
① APP系統構架

3 自動化巡檢APP開發
無人機上激光模塊與相機并列安裝,使用同一云臺以保證激光光路與相機光路平行,通過遙控可以上下調整改變激光指向。無人機整機質量不超過1.5 kg,適合城市環境,使用簡便。按照《民用無人機駕駛員管理規定》的質量劃分,整機質量不超過1.5 kg的無人機無需證照管理,沒有無人機駕照也可以使用。無人機樣機見圖3。
在爆破設計中將預裂孔逐孔編號,通過測量現場放線獲得預裂孔孔位實際高程,根據爆破設計計算出每個預裂孔的實際孔深,制成實際造孔參數表下發作業隊并進行技術交底,作業隊按造孔參數表控制預裂孔孔深。邊坡特殊開挖段(如漸變段等),技術人員要逐孔進行計算,計算出各預裂孔的方位角、傾角及孔深,并在造孔過程中配合質檢員現場校核各預裂孔的鉆孔參數。預裂孔造孔嚴格執行“三定”制度。在鉆機開孔前,對鉆工進行詳細的技術交底,嚴格執行“定機、定人、定崗”制度,對每個孔的孔深、傾角及鉆孔責任人實行掛牌標示,做到責任到人。在每臺鉆機上設置有鉆工作業明白卡,明確了鉆孔工藝的程序和質量要求。
移動設備通過無線雙向數據傳輸系統與無人機連接,通過USB線連接無人機遙控器。移動設備接收的下行數據包括無人機上實時巡檢畫面、甲烷體積分數路徑積分、無人機的位置坐標,向無人機發送的上行數據有航線和拍照等控制指令。

移動APP應用程序使用安卓平臺軟件開發包(Android SDK)和大疆移動軟件開發包(DJi Mobile SDK)進行構建和開發,在安卓系統移動設備上運行,見圖4。
“你們救護隊也功不可沒!”馬國平回望著后面的女兵,她們英姿颯爽。“三天的游擊戰,我們一連居然沒有死傷一人,這個奇跡,是因為有你們強大的救護隊作后盾啊。”
巡檢過程中,需要通過激光點來確定巡檢位置,激光點在巡檢視窗中僅為一個綠點,在對某些目標探測時還需要關閉激光綠點,且由于機械安裝和反射距離等產生的誤差,激光點很難保持在同一位置。因此設計了交叉十字線標記方法,指示當前激光點在巡檢視窗中的位置,見圖8。
通過計算不同試驗要素場能量差值,即平均總能量EDTE(Difference Total Energy,DTE)(Zhang et al.,2002)來衡量擾動成員對預報場影響的敏感程度。一般情況,EDTE大,擾動對預報的影響大;EDTE小,擾動對預報的影響小。計算公式如下:
③ 自動飛行航線編輯
④ 復查歷史巡檢報告

自動飛行是通過編制、上傳和運行航線文件完成的。航線文件是將燃氣管道GPS坐標作為航點,再設置航高和飛行速度等參數生成的。航線總長在編制航線時自動計算并顯示在界面上,并根據設定的飛行速度自動計算和顯示預計飛行時間,見圖7。航點可以使用管道坐標數據,也可將無人機放置在管道位置使用APP的打點功能現場采集航點坐標。經過校準飛行的航線可以保存下來作為巡檢航線,在需要時直接上傳使用。
從移動設備中加載所有歷史巡檢報告,讀取標記點的信息。可以根據坐標信息,選擇照片縮略圖或對照片存儲卡中的內容與現場情況進行對比,達到復查標記點的目的。
⑤ 交叉十字線方法標記激光點位置
② 實時數據顯示和自動拍照記錄保存
洛克菲勒,從小家教很嚴,靠給父親做“雇工”掙零花錢。他清晨便到田里干農活,有時候也幫母親擠牛奶。他有一個專用于記帳的小本子,把自己的工作量化后,按每小時0.37美元記入帳,爾后與父親結算,這件事他做得很認真,感到既神圣又趣味無窮。更有意味的是,洛克菲勒的第二代、第三代乃至第四代,都嚴格照此執行。美國人常將自己不需要的東西拿出來拍賣,小孩自己用不著的玩具等也可以擺在家門口出售,以獲得一點收入。
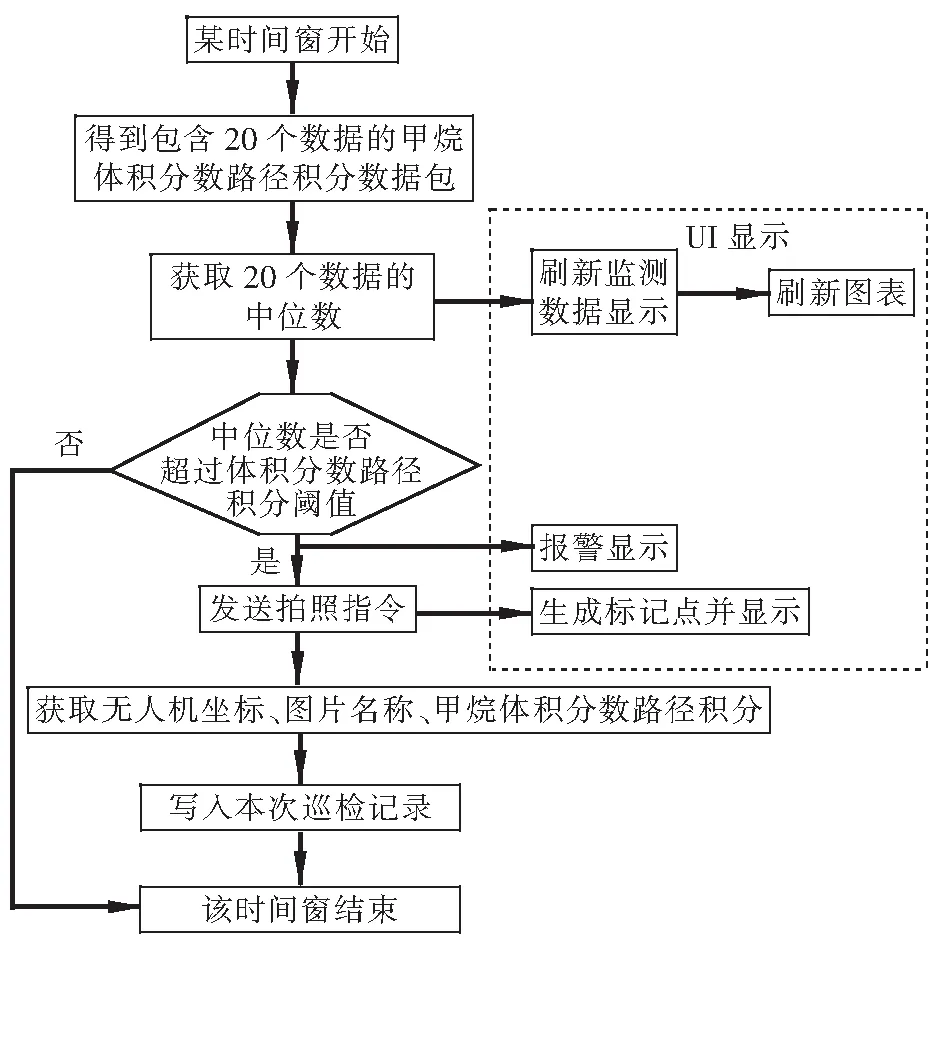
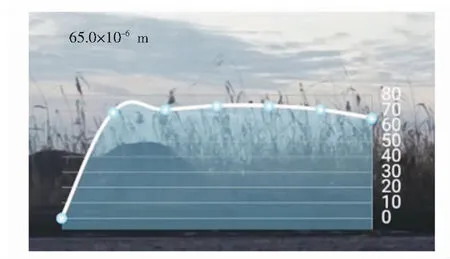
設置甲烷體積分數路徑積分閾值,利用時間窗的統計方法實時處理和顯示甲烷體積分數路徑積分。微型激光甲烷遙測模塊每1 s可以測量100個數據,以記錄20個數據的時間即0.2 s為一個時間窗,取這20個數據的中位數作為顯示數據。顯示數據實時刷新,并自動生成一段時間內的甲烷體積分數路徑積分隨時間變化曲線,顯示甲烷體積分數路徑積分變化情況。時間窗實時數據顯示和自動拍照記錄保存流程見圖5,實時數據顯示窗體見圖6。當監測數據超過設定閾值時報警,顯示數據由白色變為紅色,移動設備發出報警聲。發出報警的同時觸發自動拍照,無人機拍照完成后,根據無人機坐標在安卓移動設備上標記當前位置,生成標記點,按照坐標、甲烷體積分數路徑積分、照片名的順序寫入本次巡檢報告。結束本次巡檢時,根據保存時間生成巡檢報告的文件名,并在報告內容中記錄與巡檢相關的其他信息,將巡檢報告存入終端設備存儲空間。若沒有超過設定閾值,則不會拍照、記錄或生成報告。也可通過手動記錄功能,拍照并記錄,寫入巡檢報告。
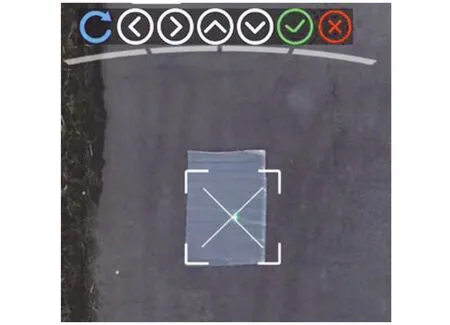
默認將交叉十字線設置在巡檢視窗的中心,需要校準激光點位置時,移動交叉十字線在巡檢視窗中的位置,每次移動一個像素點,當交叉十字線中心與激光點重合時,保存當前位置,將默認位置變為當前位置,避免反復調整。
校準后,通過交叉十字線對準探測目標的精確度大大提高,在對樓外立管局部損壞部位探測時,激光點可以準確照射到立管損壞部位,見圖9。

4 巡檢應用
激光甲烷遙測無人機在天津濱海東新燃氣有限公司投入巡檢使用后取得良好效果,不僅彌補了人工巡檢難以到達的缺口,提高了安檢率,還在實際無人機巡檢中成功發現泄漏點,并及時組織修復了泄漏的管道,防止了事故發生。
2021年11月24日,無人機巡檢某小區立管帶氣空房,在6層一間廚房外透窗探測發現甲烷體積分數路徑積分較高,見圖10。維修人員立即趕到現場,在小區相關人員配合下,打開房門后進入廚房,使用手持儀器測量發現泄漏位置并及時組織了修復。
“一帶一路”合作中,國際化企業有必要形成專門的企業社會責任部門,對部門人員進行專業培訓,能夠讓他們對企業社會責任有系統了解,從而在企業社會責任的履行過程中進行專業管理,使相關資源得到更為有效的利用,獲取相關社會責任行為的最大社會效應。國際化企業有必要將社會責任納入到其長期的發展戰略,對社會責任履行的范圍、層次以及重點等進行系統的統籌安排,從而強化企業的公民意識,構建基于科學分析的企業社會責任戰略(樊蓉,2018),真正的提升企業的國際品牌形象。

同月,無人機巡檢某小區樓外管道時,在調壓箱處測得甲烷體積分數路徑積分較高。維修組現場確認調壓器發生泄漏,并及時更換損壞部件,避免了事故發生。
