基于強化學習的智能超表面輔助無人機通信系統(tǒng)物理層安全算法
2022-07-27 09:13:30胡浪濤畢松姣劉全金吳建嵐
電子與信息學報 2022年7期
胡浪濤 畢松姣 劉全金 吳建嵐 楊 瑞 王 宏
①(安慶師范大學電子工程與智能制造學院 安慶 246133)
②(智能感知與計算安徽省高校重點實驗室 安慶 246133)
③(安徽省鐵路投資有限責任公司 合肥 230601)
1 引言
隨著5G無線網(wǎng)絡的快速發(fā)展,無人機(Unmanned Aerial Vehicle, UAV)因其具有低成本、高機動性、覆蓋范圍廣、可以按需部署等優(yōu)點,在無線通信領(lǐng)域引起了廣泛的研究[1–6]。UAV可以按需部署至當前地面通信設備無法覆蓋的區(qū)域,用于緩解突發(fā)狀況下場景的通信壓力,進而提高通信質(zhì)量。UAV作為一個空中基站為服務區(qū)內(nèi)的用戶提供信號的覆蓋[1,2]。例如,當?shù)孛娉霈F(xiàn)緊急情況,地面基站被摧毀,UAV可臨時代替被損壞的基站,以維持正常的通信;考慮較遠的用戶之間的通信場景,采用UAV作為中繼,可改善傳播環(huán)境,增強信號的傳播范圍,提高系統(tǒng)的通信性能[3,4];此外,UAV還作為空中用戶,用于輔助信息傳播和數(shù)據(jù)收集[5]。
在上述UAV通信應用中,由于無線信道的廣播特性,其傳播沒有明確的物理邊界,這將導致通過無線方式傳播的機密信息很容易被非授權(quán)用戶竊聽或者受到攻擊。UAV網(wǎng)絡的安全和隱私問題受到研究者的廣泛關(guān)注[7–10]。傳統(tǒng)的加密技術(shù)可以部分解決UAV網(wǎng)絡的安全問題。然而,找到一種有效的方法來解決其潛在的數(shù)學問題是困難的,加密技術(shù)的安全性將受到極大的限制。因此,物理層安全成為解決UAV網(wǎng)絡安全問題的理想選擇,通過傳輸設計基本實現(xiàn)了安全通信[7,8]。文獻[9]考慮UAV和地面用戶的雙向通信中,在竊聽者存在的情況下,通過聯(lián)合優(yōu)化UAV軌跡和合法發(fā)射機的發(fā)射功率,提高合法信號質(zhì)量并降低竊聽信號質(zhì)量,以最大化平均安全速率。文獻[10]提出一種新型的UAV移動干擾方案,利用UAV來傳輸干擾信號,以防止竊聽者竊聽機密信息,通過聯(lián)合優(yōu)化UAV的軌跡和干擾功率,提高安全速率。
然而在復雜的城市環(huán)境中,UAV和地面用戶之間的視距鏈路可能會被阻擋[11],這嚴重降低了信道質(zhì)量。針對這一問題,智能超表面(Reconfigurable Intelligent Surface, RIS)可以通過反射UAV和用戶之間的傳輸信號來輔助UAV安全通信,改善無線環(huán)境[12–14]。RIS是目前被廣泛認可的潛在6G關(guān)鍵技術(shù)之一[15],RIS由大量低成本的可重構(gòu)反射單元組成,不需要復雜的編碼、解碼和射頻處理操作,可以有效地控制入射信號的相位、振幅、頻率等,改善無線傳播環(huán)境,可以實現(xiàn)更快、更可靠數(shù)據(jù)傳輸[16–19]。在UAV通信中搭建智能反射面,通過直射與反射信號疊加,可增強用戶收到的信號。由于RIS 的低成本、易部署特性,有望實現(xiàn)大范圍的航路信號覆蓋。文獻[12] RIS引入UAV網(wǎng)絡并被證明可以顯著提高數(shù)據(jù)速率,但未考慮其安全性能。文獻[13]研究了RIS輔助下的UAV網(wǎng)絡的安全通信問題,通過聯(lián)合優(yōu)化RIS的相移、UAV的軌跡和功率最大化安全速率。文獻[14]考慮了一種RIS輔助的UAV網(wǎng)絡,其中UAV加裝一個RIS作為無源中繼,提出了一種迭代算法,通過聯(lián)合優(yōu)化UAV位置和RIS的相移最大限度地提高系統(tǒng)的保密率。
上述研究主要是利用傳統(tǒng)的優(yōu)化技術(shù),對RIS輔助安全通信系統(tǒng)中的UAV軌跡和RIS相移進行聯(lián)合優(yōu)化,對于大規(guī)模系統(tǒng)效率較低。受深度強化學習可以實現(xiàn)對高維數(shù)據(jù)處理的啟發(fā),一些研究者嘗試利用人工智能算法進行優(yōu)化RIS的反射波束形成[20]和UAV軌跡[21–23]。然而,文獻[21–23]沒有引入RIS這一先進技術(shù),文獻[13]引入了RIS技術(shù),但是UAV的軌跡是在2維平面上進行優(yōu)化,UAV的高度是固定的,這在真實的系統(tǒng)中是不現(xiàn)實的。本文基于雙深度Q網(wǎng)絡(Double Deep Q Network,DDQN)設計了一種聯(lián)合優(yōu)化RIS相移矩陣和UAV的3D軌跡算法,最大化系統(tǒng)可達到的安全速率。
2 系統(tǒng)模型


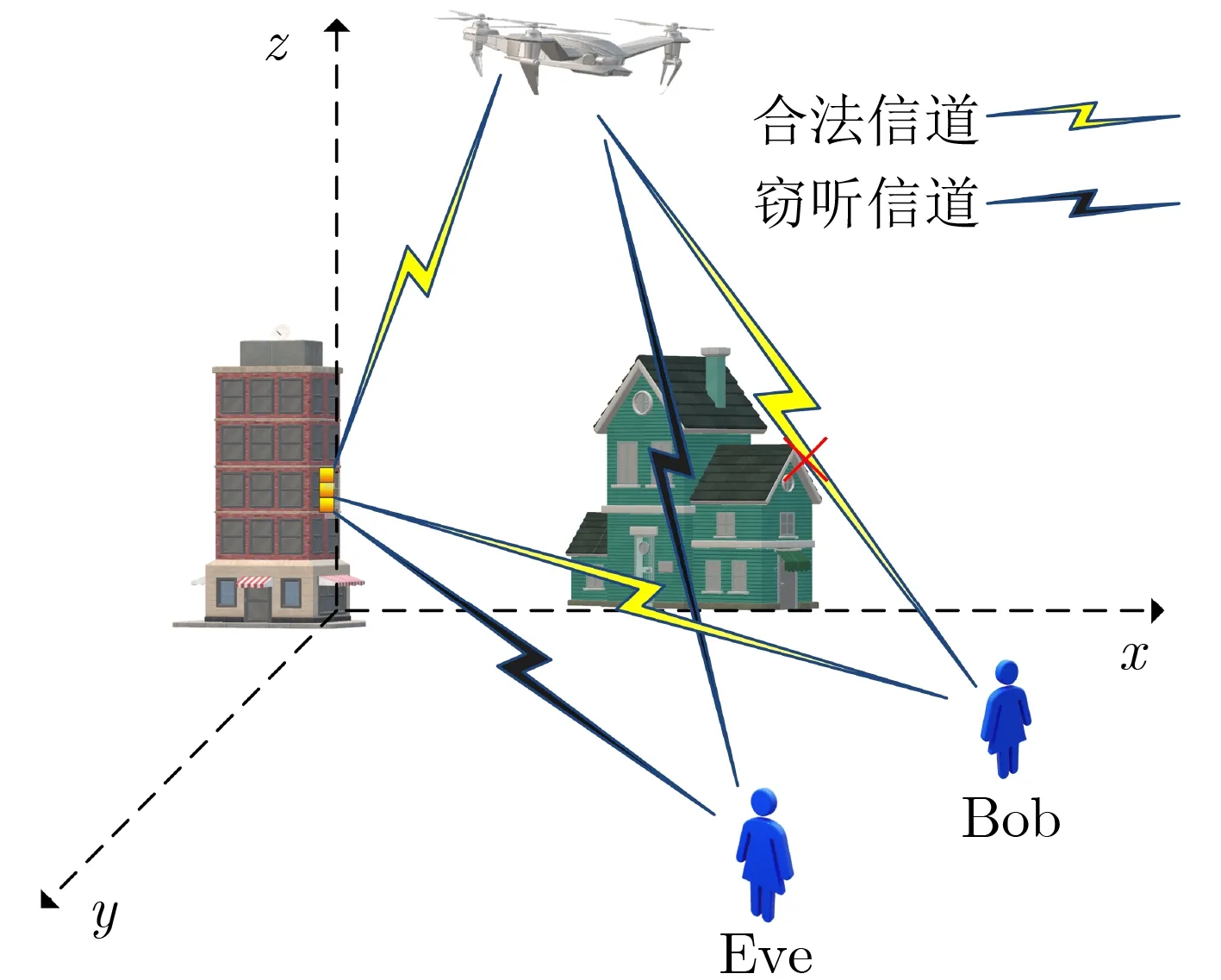
圖1 RIS輔助UAV安全通信系統(tǒng)

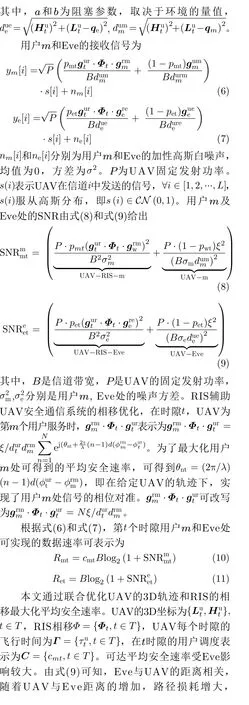

其中,式(12a)表示在時隙t的用戶調(diào)度,式(12b)表示傳輸數(shù)據(jù)的任務量約束,式(12c)、式(12d)分別表示在UAV的水平速度、垂直方向速度約束,式(12e)表示UAV飛行高度約束,式(12f)表示每個時隙的飛行時間約束。式(12)描述的優(yōu)化問題是非凸的。為求解此類問題,本文提出一個基于DDQN的數(shù)據(jù)驅(qū)動學習算法。
3 深度強化學習算法設計
動態(tài)的無線環(huán)境可以建模為馬爾可夫決策過程(Markov Decision Process, MDP),強化學習中的智能體通過與未知環(huán)境交互不斷學習,最大化智能體得到的獎勵。在動態(tài)的網(wǎng)絡環(huán)境中,經(jīng)常使用無模型強化學習算法,學習估計每個狀態(tài)-動作值函數(shù) (稱為Q值函數(shù))。在t時隙,智能體從環(huán)境中獲取狀態(tài)st,執(zhí)行動作at,與環(huán)境交互后對應的到達下一個狀態(tài)st+1,并得到獎勵值rt。
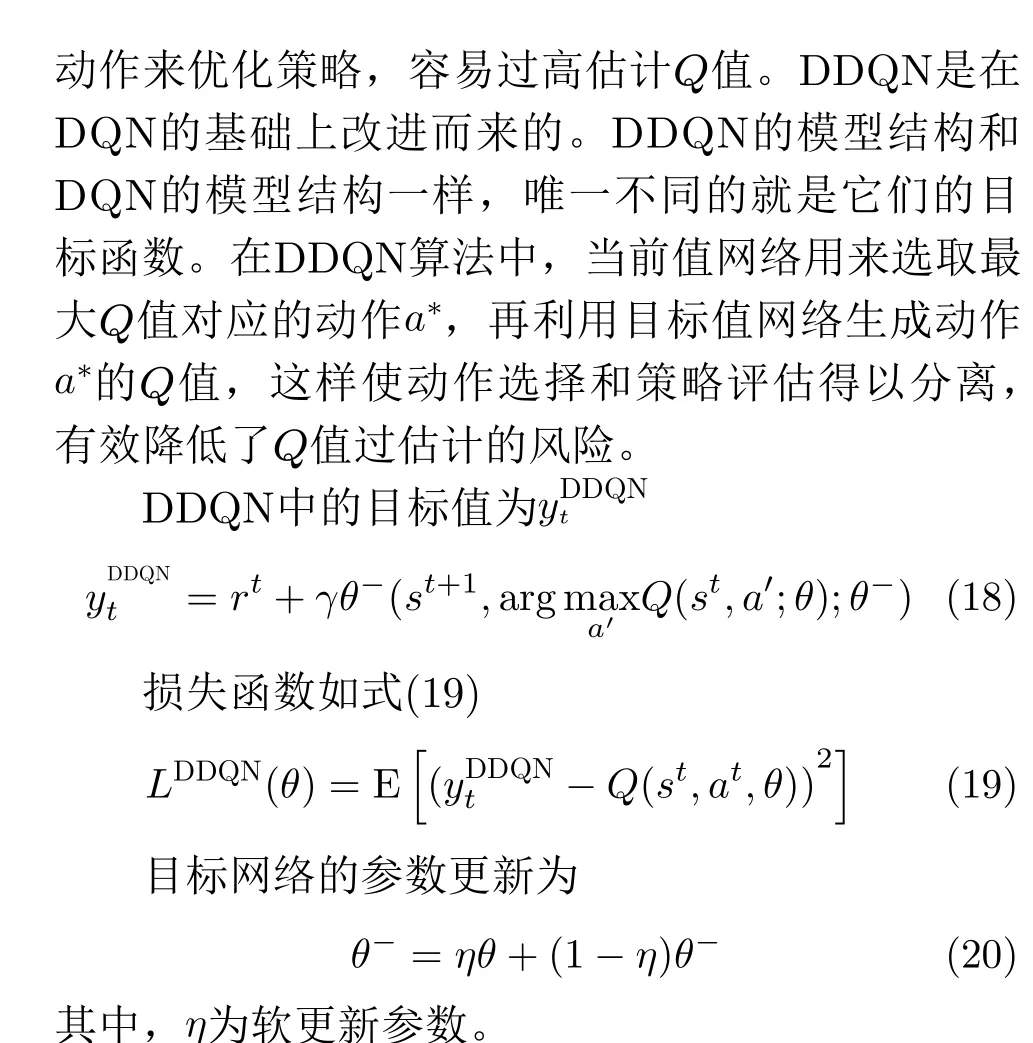
本文的目標是優(yōu)化UAV的3D軌跡和RIS的相移以最大化合法用戶平均安全速率。為此,本文將平均安全速率最大化問題表述為 MDP并隨后采用深度強化學習算法獲得累積平均安全速率獎勵。本文以深度Q網(wǎng)絡(Deep Q Network, DQN)為基礎,為克服DQN的Q值高估問題,本文采用了DDQN框架,通過訓練深度神經(jīng)網(wǎng)絡,以最大化可實現(xiàn)的平均安全速率。將RIS輔助的UAV安全通信系統(tǒng)建模為一個環(huán)境,UAV可視為一個智能體。
3.1 預備知識
3.1.1 Q學習
Q學習算法[25]中使用Q函數(shù)表示智能體在狀態(tài)s下,采取動作a,所獲得的累計獎勵值,Q函數(shù)表示為Qπ(st,at)

α是用以更新Q函數(shù)的學習率。
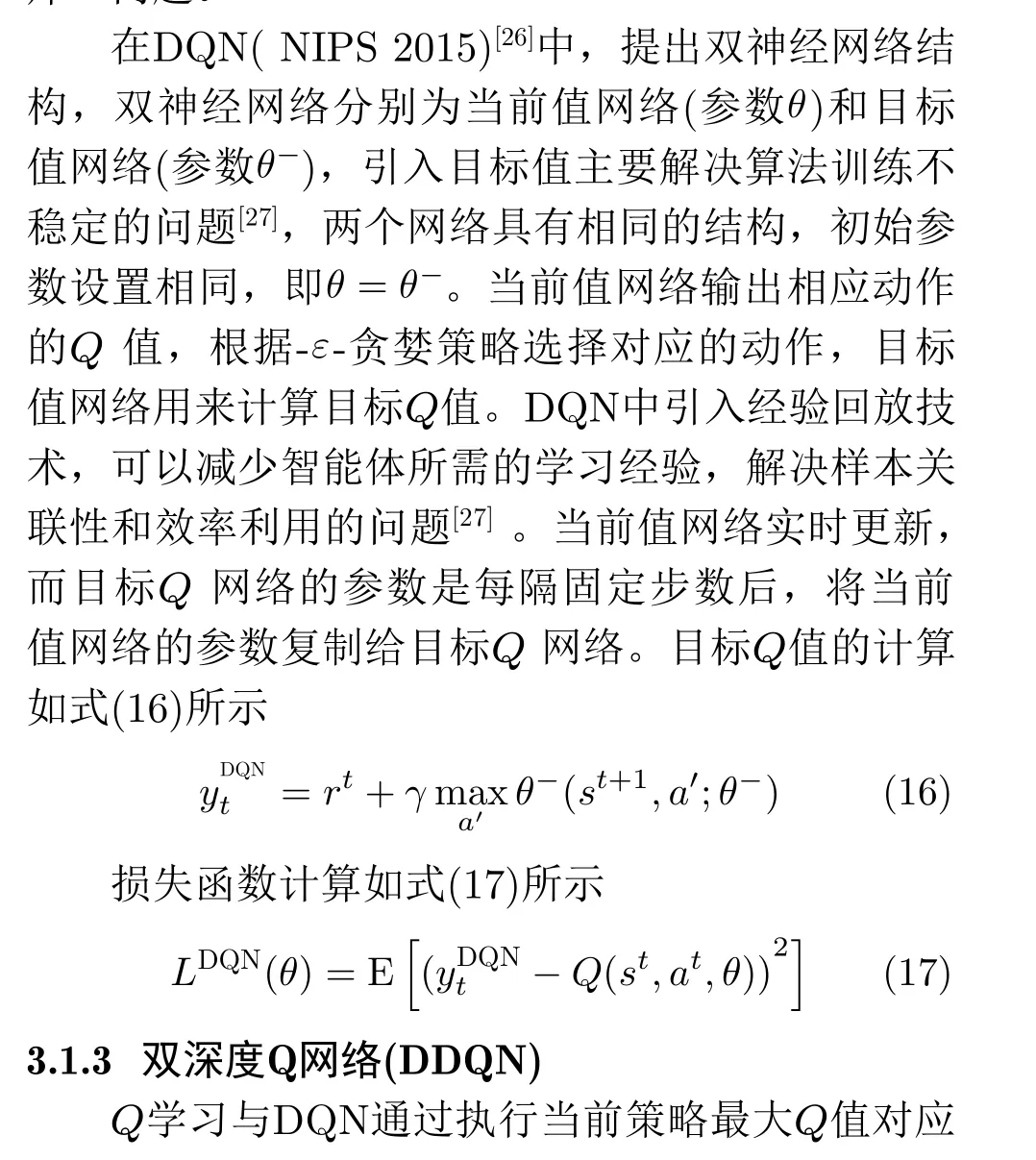
3.1.2 深度Q網(wǎng)絡(DQN)
Q學習用表格存儲Q值,對于維度較大的狀態(tài)空間和動作空間實時更新難以實現(xiàn),DQN將值函數(shù)估計與神經(jīng)網(wǎng)絡相結(jié)合,解決Q學習的“維度爆炸”問題。
3.2 基于DDQN的3D軌跡算法設計

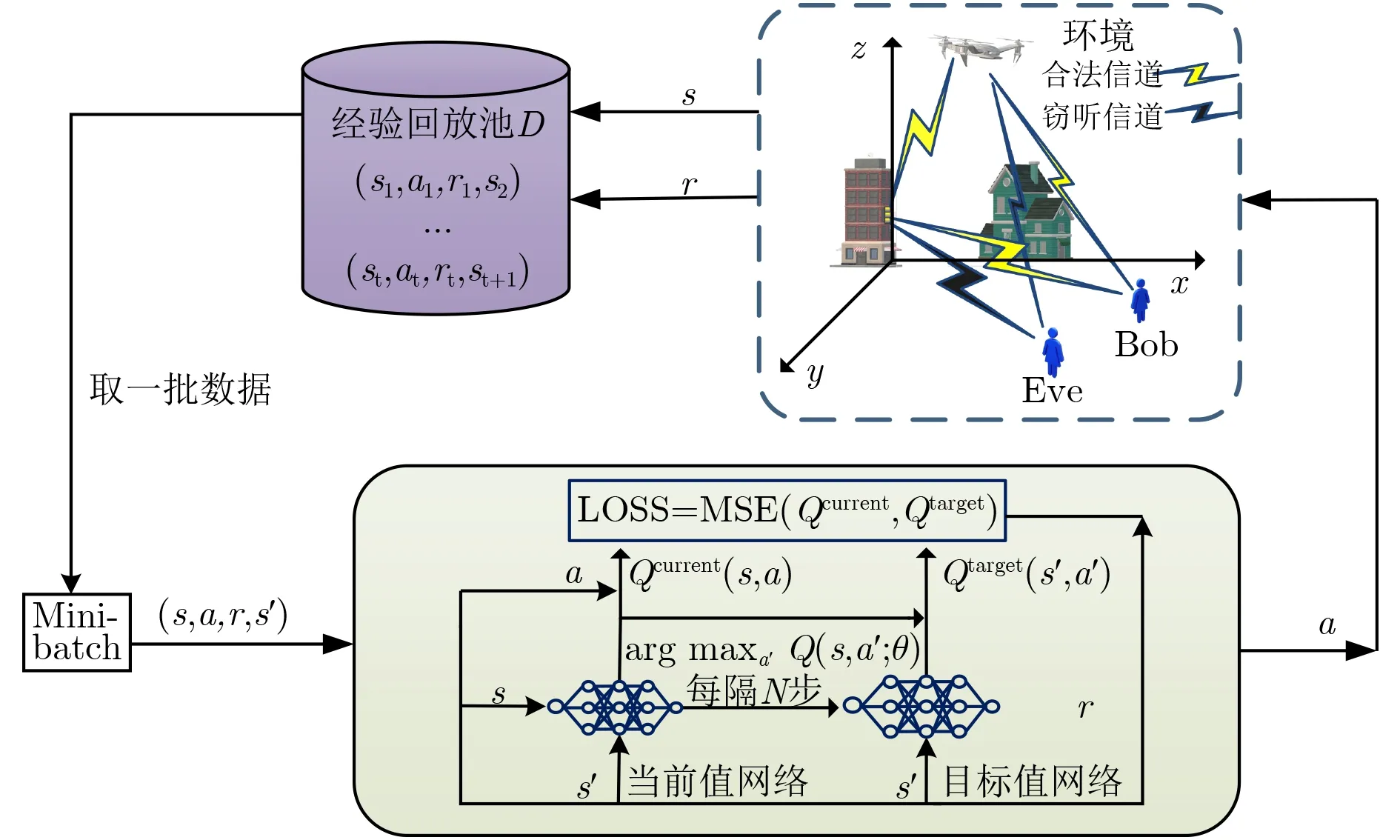
圖2 RIS輔助無人機DDQN網(wǎng)絡結(jié)構(gòu)圖

本文設計了基于DDQN算法來優(yōu)化UAV的3D軌跡,通過介紹該算法的結(jié)構(gòu),給出了優(yōu)化UAV軌跡過程。DDQN優(yōu)化算法見表1。
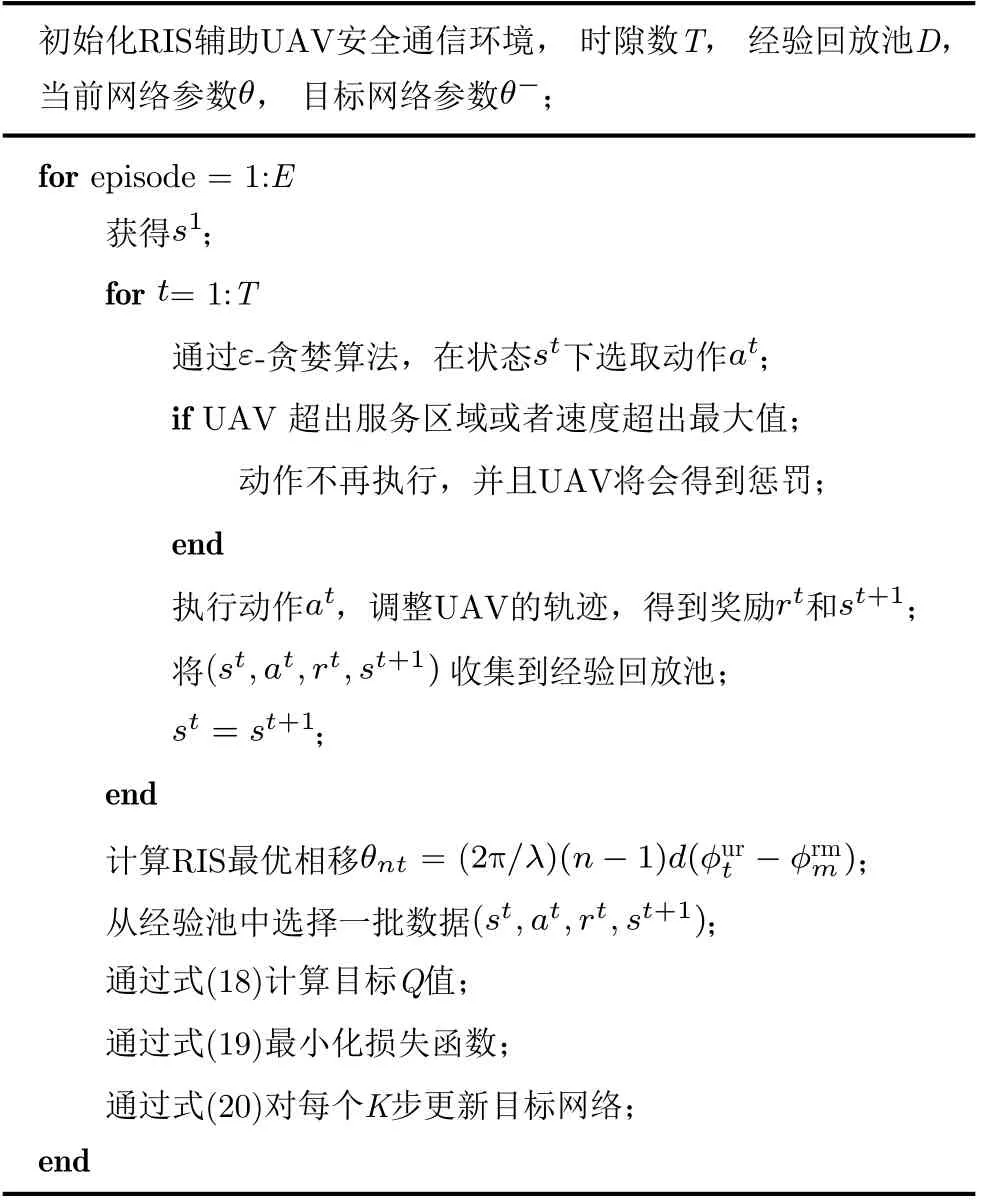
表1 聯(lián)合優(yōu)化UAV軌跡和RIS相移算法(算法1)
4 仿真結(jié)果
本節(jié)通過仿真驗證所提算法在RIS輔助UAV無線通信系統(tǒng)安全傳輸?shù)臄?shù)值結(jié)果,并將數(shù)值結(jié)果與沒有RIS輔助的系統(tǒng)、有RIS但不優(yōu)化相移的系統(tǒng)進行比較。
4.1 模型訓練及參數(shù)設置
本文使用Python 3.7, TensorFlow 1.15.0搭建RIS輔助UAV安全通信模型:選用兩層的神經(jīng)網(wǎng)絡,輸入層包含3個神經(jīng)元,隱含層包含20個神經(jīng)元,使用RMSProp優(yōu)化器訓練深度神經(jīng)網(wǎng)絡,激活函數(shù)為ReLU函數(shù),每個回合包含3000個時隙。將{st,at,rt,st+1}存入經(jīng)驗池,待經(jīng)驗值存滿后,隨機抽取32個經(jīng)驗序列進入神經(jīng)網(wǎng)絡進行訓練。
UAV在所給定服務范圍內(nèi)飛行,m個用戶被隨機地分配在UAV服務區(qū)域內(nèi),設Lu0=[0,0]T,zR=50,qw=[700,320],d=λ/2。參數(shù)設置見表2[24]。
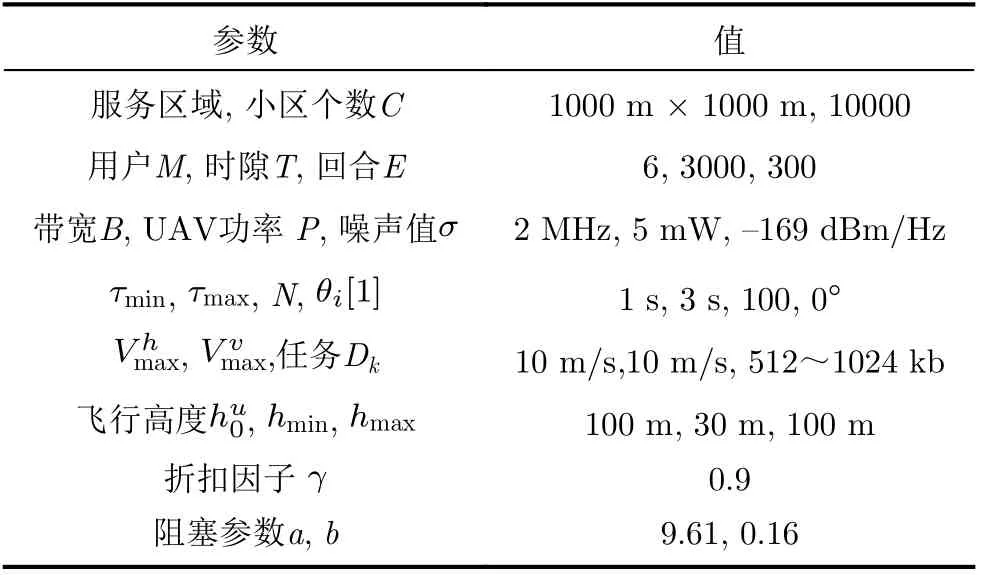
表2 仿真參數(shù)設置
4.2 仿真分析
本文將DDQN的優(yōu)化效果與DQN的優(yōu)化效果進行比較,本文算法框架通過將選擇動作網(wǎng)絡與目標Q值生成網(wǎng)絡分離,克服了DQN的Q值過高的問題,而獲得比DQN更好的最優(yōu)獎勵。圖3顯示了4種方案的平均安全速率對比,隨著迭代次數(shù)增加,動作價值函數(shù)隨著步長增加而收斂。從圖3可以看出,所有方案的安全速率隨著步長的增加而逐漸增加。本文所提RIS輔助UAV方案(DDQN_優(yōu)化RIS相移)的平均安全速率分別是DQN算法(DQN_優(yōu)化RIS相移)、有RIS但沒有優(yōu)化相移(DDQN_RIS隨機相移)和沒有RIS輔助(DDQN_無RIS)的1.58倍、1.97倍和5.21倍。仿真表明部署優(yōu)化后的RIS輔助UAV是可以提高無線通信安全性。

圖3 4種方案下的平均安全速率對比
圖4仿真了優(yōu)化UAV的3D軌跡算法和固定高度算法的平均安全速率,優(yōu)化3D軌跡的方案(優(yōu)化H)和固定高度的方案,固定高度方案分別為60 m和100 m。從仿真中可以看出,用戶所達到的安全速率與UAV的飛行高度也有著密切的關(guān)系。優(yōu)化UAV的3D軌跡明顯比固定高度的方案取得更好的性能。當UAV高度的增加時,路徑損耗增加,所達到的安全速率的值較低。由圖4可知,本文所提方案即優(yōu)化UAV的3D軌跡達到的平均安全速率分別是固定高度60 m和100 m的1.31倍、1.83倍,即本文所提優(yōu)化UAV的3D軌跡算法的可以實現(xiàn)較高的平均安全速率。

圖4 不同高度下所達到的平均安全速率
如圖5所示,本文所提基于DDQN的優(yōu)化算法與文獻[13]中使用到的傳統(tǒng)連續(xù)凸逼近SCA算法和基于DDQN未部署RIS算法進行對比。仿真3種智能反射單元個數(shù),即{N=128, 192, 256},文獻[13]中設置無人機的高度為100 m保持不變。在本文DDQN算法中,UAV在3D空間里飛行,高度需要優(yōu)化。從圖5比較3種算法可以看出:優(yōu)化RIS的相移和UAV的3D軌跡,可以取得比固定高度的SCA算法獲得更大的安全速率,沒有部署RIS算法的UAV獲得最差的安全速率。從實驗結(jié)果可以看出,優(yōu)化UAV的高度非常重要。另外仿真結(jié)果還可以看出,不同反射單元個數(shù)情況下,平均安全速率隨著反射單元的增加而增加。

圖5 不同反射面下不同算法所達到的平均安全速率
本文采用的是視距/非視距混合信道模型,因為存在障礙物等因素使得通信環(huán)境的信道增益是隨機的,相應的UAV優(yōu)化軌跡也不是唯一的。UAV希望在服務用戶時盡可能遠離Eve,降低合法用戶傳輸被Eve發(fā)現(xiàn)的概率。將本文所提RIS輔助UAV方案與有RIS但沒有優(yōu)化相移、沒有RIS兩個方案對比。圖6、圖7分別為UAV飛行3D軌跡圖和2D平面圖,圖中黃色菱形小方塊表示RIS,黑色菱形小方塊表示Eve,黑色“×”號表示合法用戶。由圖6和圖7可知,優(yōu)化RIS相移的UAV在獲得信息傳輸速率的保障下,優(yōu)化自己的水平位置和高度,靠近用戶飛行,從2D平面上看,它盡可能地遠離竊聽者。沒有RIS的方案UAV更接近Eve,這顯然降低系統(tǒng)的安全性能。RIS隨機相移方案的性能是在優(yōu)化相移和無RIS方案之間,從水平面上看,它遠離Eve,但是它也遠離了用戶。RIS輔助UAV方案在滿足用戶所需服務的同時,試圖遠離Eve,從2D平面圖和3D軌跡圖可以看出本文所提方案具有可行性。
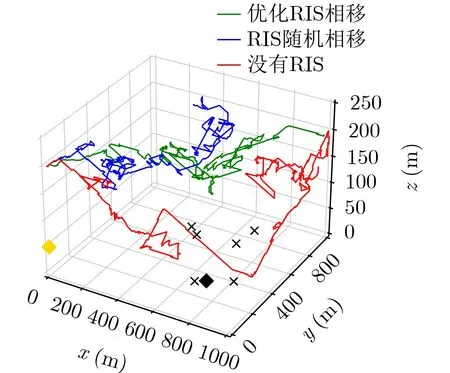
圖6 UAV的3D軌跡圖
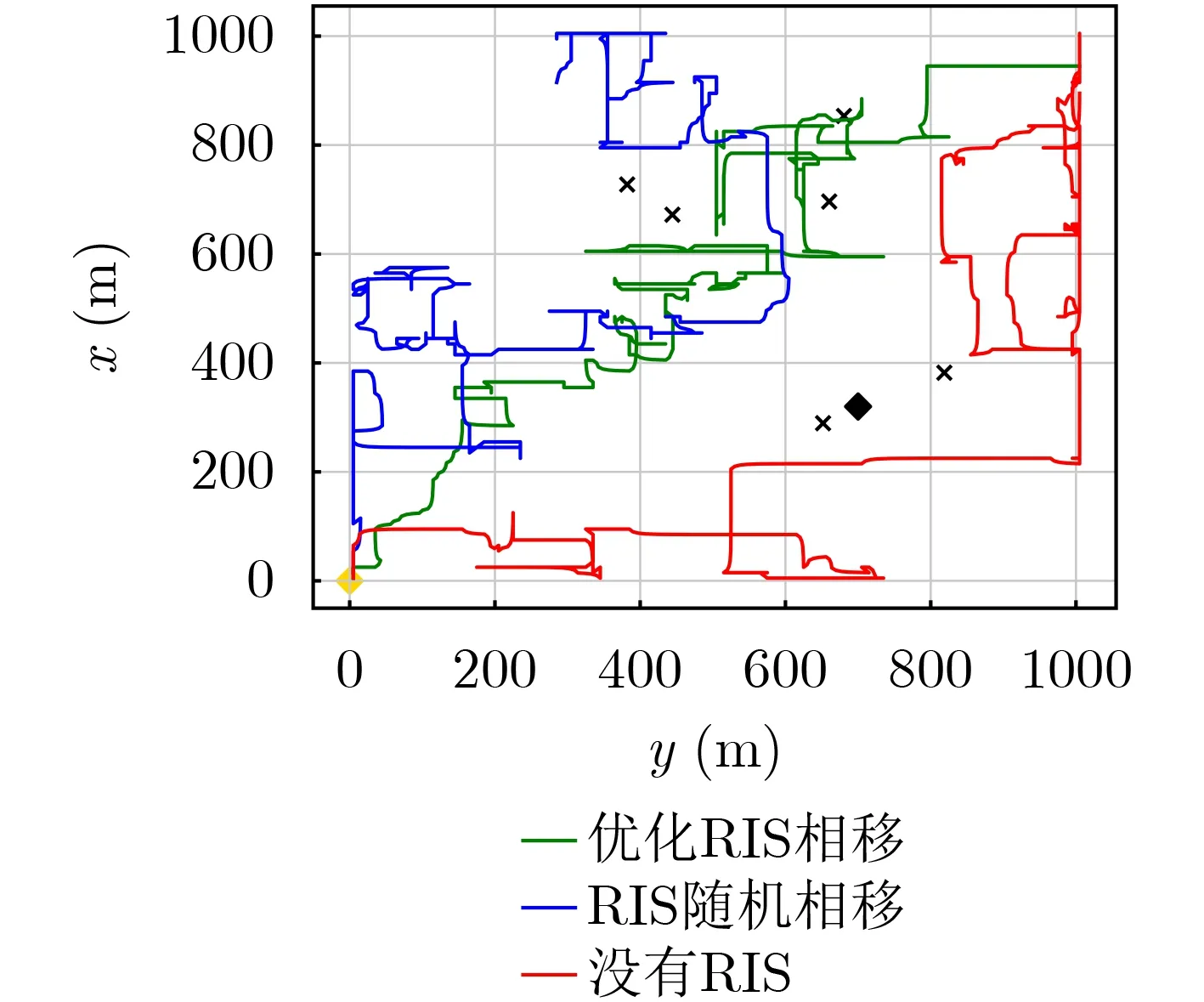
圖7 UAV的2D平面圖
在SCA算法中,算法的復雜度為O(NiteN3.5),Nite表示迭代的次數(shù),N表示智能反射面單元數(shù);在本算法中,神經(jīng)網(wǎng)絡包含兩個全連接層和1個批標準化(Batch Normalization, BN)層,忽略BN層的開銷,計算全連接層的計算復雜度,UAV的3維坐標作為輸入層,即神經(jīng)元個數(shù)為3,中間隱含層的神經(jīng)元個數(shù)為2 0,輸出層為動作的個數(shù)L×H×C×Γ,1次訓練的計算量為3×20+20×(L×H×C×Γ): 那么總體的復雜度為O(E×T×(3×20+20×(L×H×C×Γ))),其中E表示回合數(shù),T表示1個回合的訓練步長數(shù)目。和SCA算法對比,所提算法訓練的復雜度較高,但是強化學習一旦訓練完畢,進行預測時,算法的復雜度就非常小了。 算法的收斂性是通過在每個回合中不斷地降低DDQN目標網(wǎng)絡的Q值和訓練網(wǎng)絡的Q值之間的誤差來實現(xiàn)的。隨著回合步長的增加,誤差會逐漸減小,從而算法達到收斂。
5 結(jié)論
本文基于深度強化學習中的DDQN算法提出一種聯(lián)合優(yōu)化RIS相移和UAV的3D軌跡以保障物理層通信安全的方法,目的是在Eve存在的情況下,UAV基站向合法用戶發(fā)送的消息被安全傳輸,最大化平均安全速率。仿真表明,本文所提的算法可以對UAV的3D軌跡進行優(yōu)化,盡可能遠離Eve,降低被竊聽的概率。本文所提方案與固定飛行高度的傳統(tǒng)SCA方案、RIS輔助沒有優(yōu)化相移和沒有RIS輔助的方案相比,可以達到最高的平均安全速率,驗證了所提算法的可行性。
猜你喜歡
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54