智能反射面輔助的無人機無線攜能通信網絡吞吐量最大化算法研究
2022-07-27 09:20:48劉志新趙松晗袁亞洲
電子與信息學報 2022年7期
劉志新 趙松晗 楊 毅 袁亞洲
(燕山大學電氣工程學院 秦皇島 066004)
1 引言
未來智慧城市的發展和大規模低功耗物聯網技術的應用,將導致無線終端節點數量的激增。然而,復雜的通信環境以及終端用戶能量受限等問題,將極大制約其發展。為此,無人機(Unmanned Aerial Vehicle, UAV)由于其高機動性和靈活性,在復雜的通信網絡中得到了廣泛的應用。目前針對UAV通信網絡的研究已取得了很多有價值的結果,文獻[1]中,UAV同時作為移動的數據收集者與能量供應者,通過聯合優化UAV的時間分配和軌跡設計,最大化多UAV無線供電網絡中的上行鏈路傳輸速率。文獻[2]研究了UAV最小能耗問題,并通過優化UAV懸停位置,最終實現系統的整體節能優化。以上工作證實了UAV路徑的合理設計是系統提升系統性能關鍵因素之一。然而,在復雜的通信環境中,如城市建筑密集區,UAV與地面用戶(Ground Users, GUs)之間的直接鏈路可能會受到障礙物的遮擋,從而嚴重影響通信質量。
智能反射面(Intelligent Reflecting Surface,IRS)技術由于其低功耗、高能效、可重構傳輸環境等特點,已受到學術界和工業界的廣泛關注[3]。IRS由一系列離散反射元件組成,每個反射元件都能獨立地反射入射信號。在微處理器的控制下,所有反射元件可以調控其入射信號的振幅和相移,從而達到理想的多徑效果[4]。為解決復雜環境中UAV與GUs間通信鏈路受阻問題,將IRS融入現有的UAV系統中將成為有效的解決方案。文獻[5]針對IRS輔助下的UAV通信網絡,聯合優化IRS相移和UAV飛行軌跡,研究了系統最大化安全速率問題。文獻[6]研究了IRS輔助下的邊緣計算(Mobile Edge Computing, MEC)場景,其中UAV作為空中的MEC服務器。仿真結果表明,IRS的輔助可以有效降低系統總能耗。
然而,上述工作并沒有考慮IRS以及GUs的能源受限問題。事實上,雖然IRS以其低功耗的特性為人熟知,當反射單元數量的提升,便不再可以忽略IRS的能耗[7]。然而,使用傳統布線或電池供應方案為IRS供電,不僅會增加維護成本,而且不便于IRS的靈活部署,難以應用到通信環境較為惡劣的場景。因此無線能量收集(Wireless Energy Harvesting, WEH)技術可成為上述問題的解決方案。綜上所述,本文基于城市環境中,提出一種新型的IRS輔助的UAV通信系統,通過適當部署IRS,以解決UAV與GUs間通信鏈路受阻問題。同時,IRS與GUs可以利用WEH從UAV的射頻信號中收集能量。本文的主要貢獻點如下:(1)本文建立了IRS輔助下UAV無線供能通信模型,通過聯合優化IRS的相移、GUs的發射功率和時間分配以及UAV路徑規劃,提升系統總吞吐量。(2)本文提出一種基于塊坐標下降法(Block Coordinate Descent,BCD)的資源分配算法來求解上述耦合且非凸的問題。其中,通過引入松弛變量、1階泰勒表達式和連續凸近似(Successive Convex Approximation,SCA)的方法將非凸的子問題轉化為凸問題進而求解。(3)數值仿真證明了本文所提算法具有較好的收斂性,并且與對比算法相比,可獲得更高的總吞吐量。
2 系統模型及問題描述
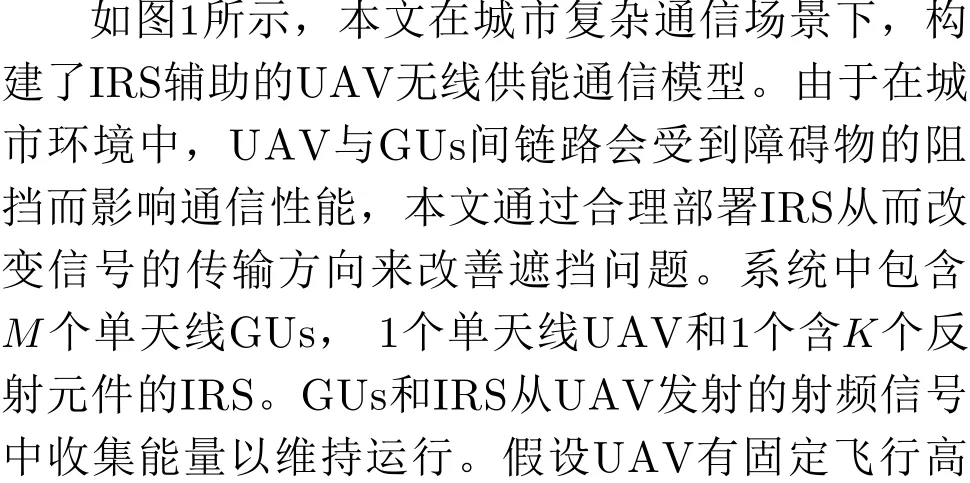
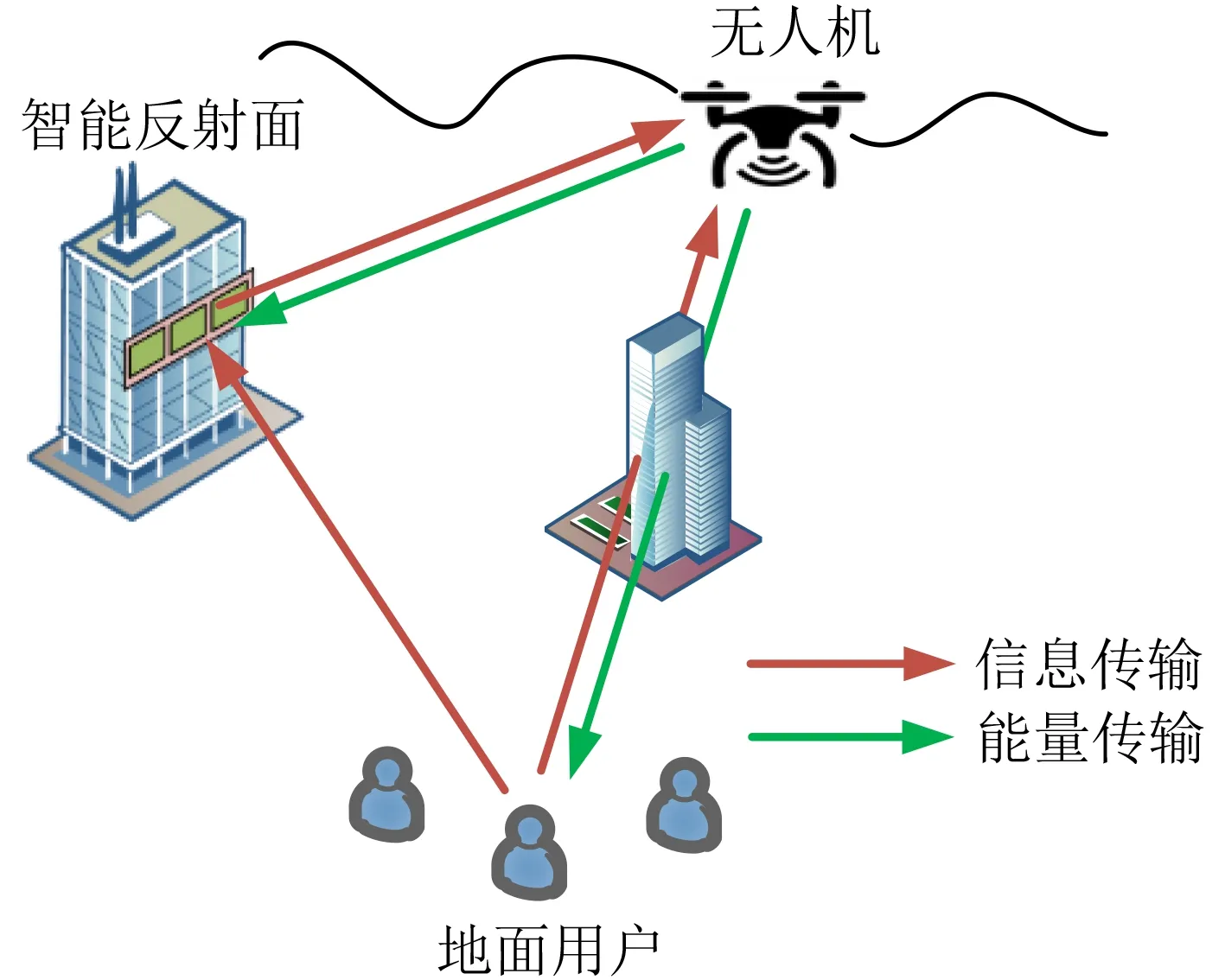
圖1 IRS輔助的UAV供能通信網絡

C7和C8表示UAV移動約束。由于目標函數與約束中多處存在變量耦合,因此優化問題式(8)難以直接求最優解。
3 優化問題轉換及求解
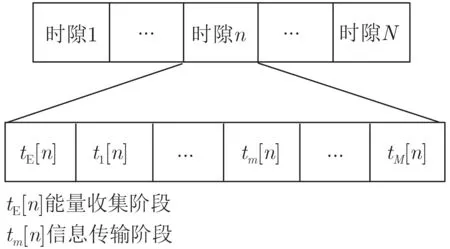
圖2 時隙分配
由于優化問題式(8)存在變量之間的耦合與非凸性,難以用傳統凸優化方式直接求解。為解決這一問題,本文利用BCD資源優化方法,將原問題解耦為3個易于求解的子問題,通過對子問題之間進行交替優化,最終求解原問題。
3.1 IRS相移矩陣優化
首先固定變量P,tE,tm和q,問題式(8)轉變為關于變量Θ的子問題,即
3.2 功率和傳輸時間優化

3.3 UAV飛行軌跡優化

此時由于具有線性的目標函數與仿射約束,子問題式(20)是一個凸優化問題,可利用標準凸優化求解工具CVX求解。為了保證問題式(20)對子問題式(14)具有較好的近似效果,此處采用SCA在每次迭代中多次逼近原問題。通過對上述3個子問題進行交替優化直至收斂,可獲得問題式(8)較為精確的次優解。
3.4 算法分析
綜上所述,基于BCD的資源優化算法如表1所示。所提算法的總計算復雜度主要取決于步驟(3)—步驟(5)。其中步驟(3)的計算復雜度為O{KMN};步驟(4)與步驟(5)利用CVX中的內點法進行求解,因此其計算復雜度分別為O{(MN)3.5}和O{L1(MN)3.5}[14],其中L1是步驟(5)中SCA過程的逼近次數。綜上,所提算法的總計算復雜度為O{(KMN+(L1+1)(MN)3.5)ln(1/ε)}, 其中ε為收斂精度。接下來,對所提算法的收斂性進行證明。此處將問題式(8)的目標函數值記為ψ,問題式(20)的目標函數記為ψlb,在第l次迭代中可得到如式(21)的關系
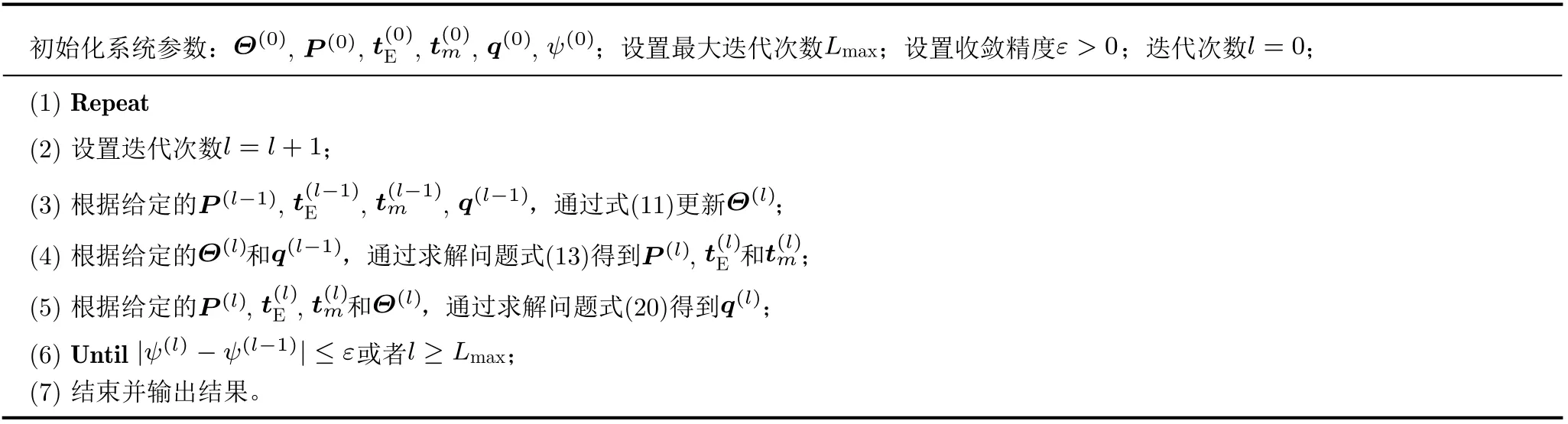
表1 基于BCD的資源分配算法
4 數值仿真及分析
,
圖3展示本文所提算法優化后的UAV軌跡。當U-G鏈路為瑞利衰落模型時,飛行時間充足條件下(N=50),UAV傾向以直線形式抵達IRS和GUs,并在每個IRS和GU上方懸停一定時間。這是因為UAV靠近傳輸節點以減少路徑損耗,同時有利于能量傳輸和信息收集。在飛行時間不足時(N=20),UAV仍然可以會發揮其移動性盡量靠近IRS以提高傳輸效率。當U-G鏈路為LoS信道模型時,UAV不再傾向靠近IRS。這是因為在U-G鏈路具有較好的信道環境下,UAV從U-G鏈路可獲得比IRS輔助的反射鏈路更多的性能收益。因此,IRS輔助的UAV系統更加適用于U-G鏈路受阻場景下。
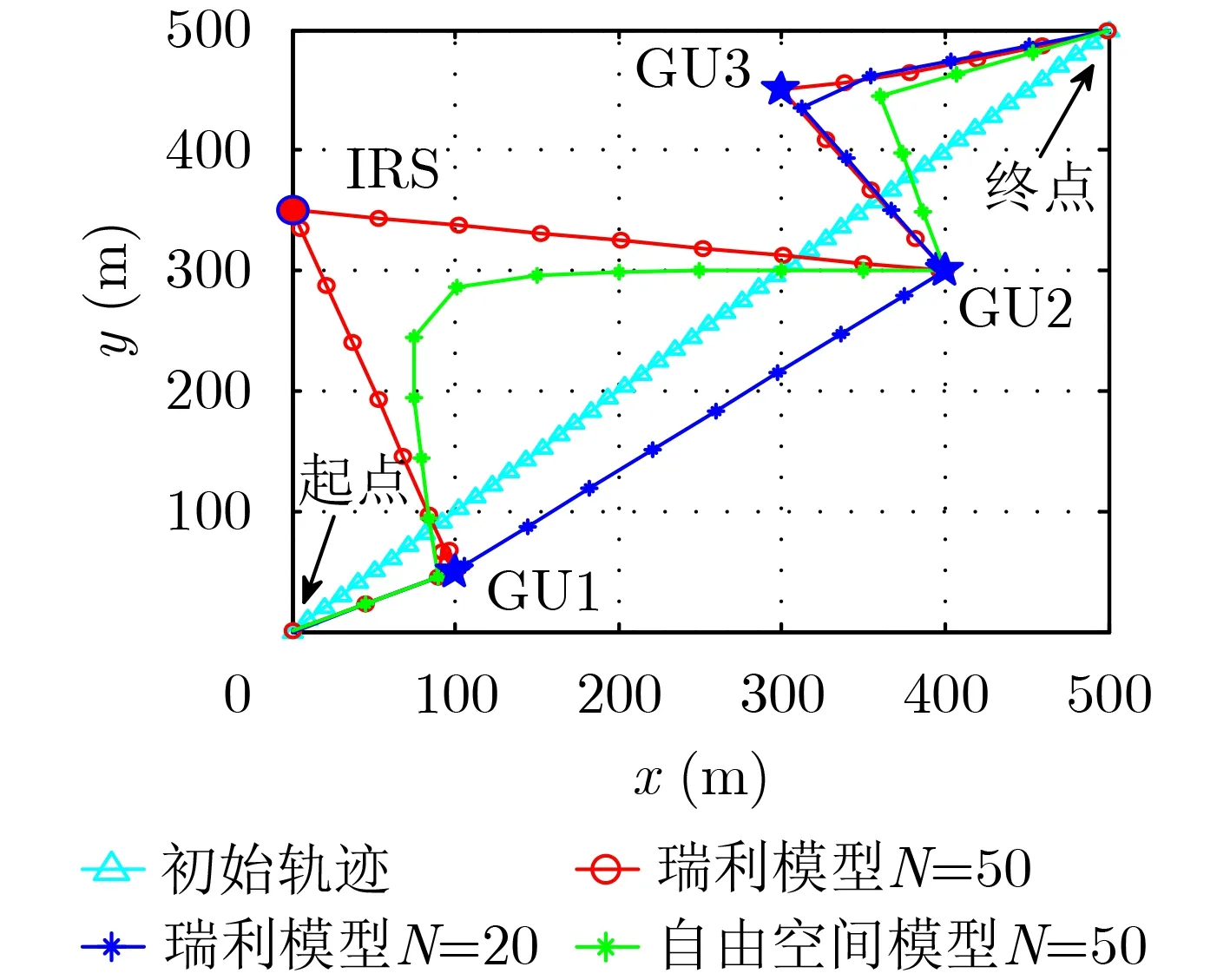
圖3 不同參數下UAV軌跡
圖4給出了不同情況下系統總吞吐量與迭代次數的關系。隨著迭代次數增加,系統總吞吐量升高并最終收斂。由圖可知,所有算法可以在4次迭代后收斂到唯一值,說明所提基于BCD的資源分配算法具有良好的收斂性。
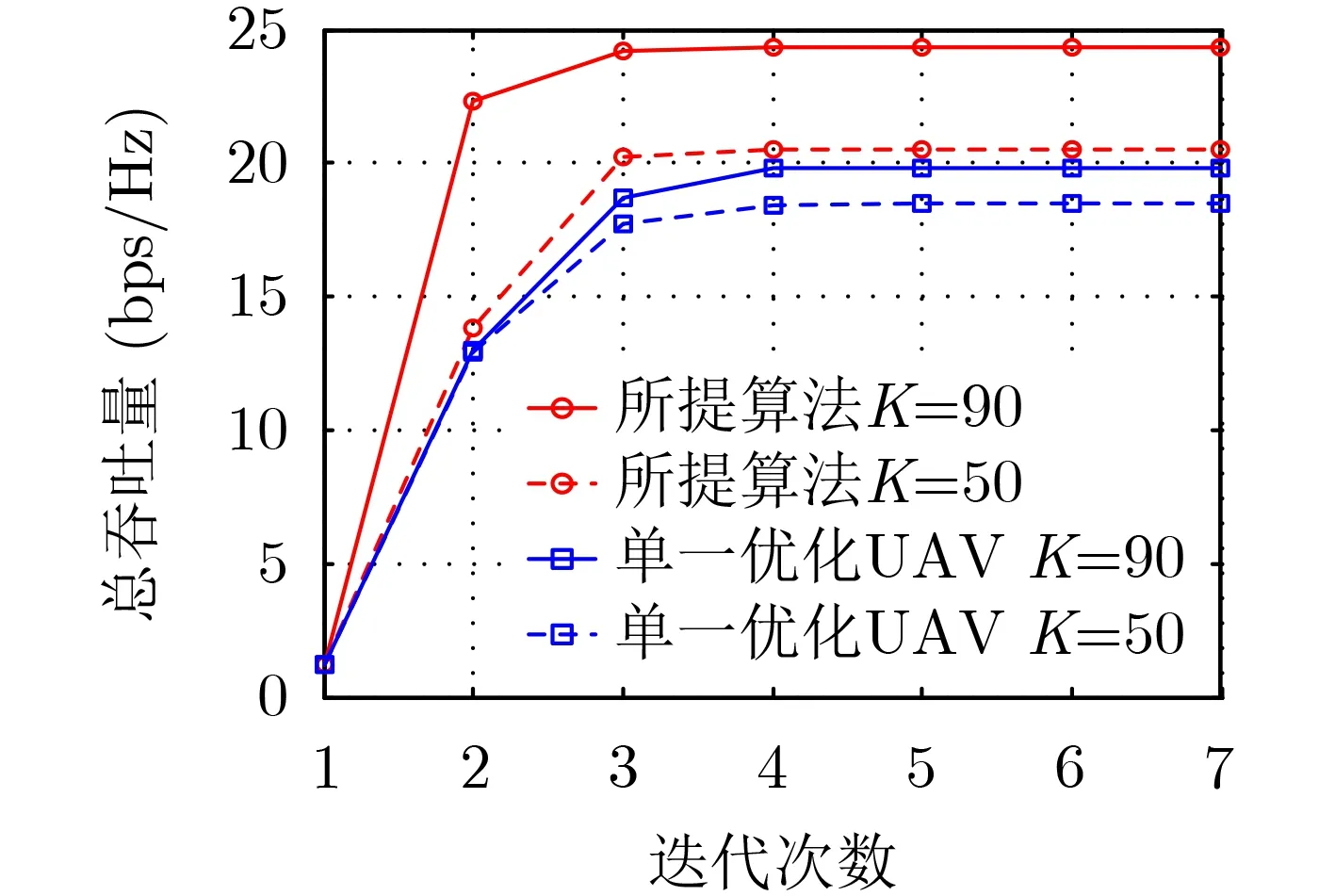
圖4 算法收斂性驗證
圖5給出了使用SCA對原函數的逼近結果。由于1階泰勒展開只能保證近似函數在展開點與原函數相等,而不能保證在整體定義域內對原函數有較好的擬合程度,因此本文采用SCA在每一次迭代中對原子問題式(14)進行多次逼近。如圖5所示,近似值為子問題式(20)最優條件下的目標函數值,將其最優解代入子問題式(14)可得到準確值。可以看到,通過SCA后,近似值與準確值可以保持在很小的誤差范圍,說明1階泰勒展開后的近似函數在通過SCA后,可以很好地逼近原問題,驗證了所提算法的合理性。
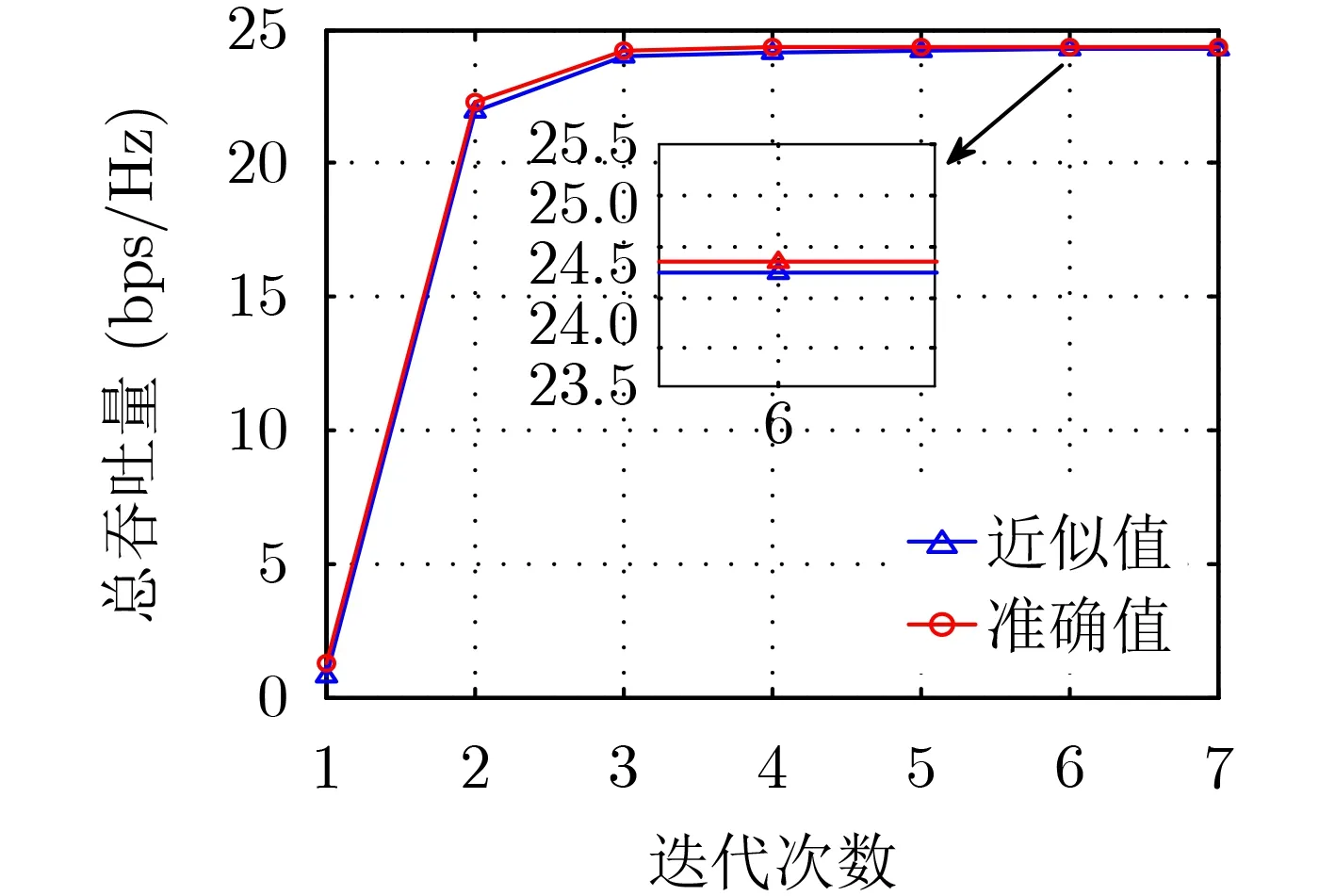
圖5 SCA逼近程度驗證圖
圖6給出了不同算法下,系統總吞吐量與IRS元件數量的關系。隨著IRS元件數量提升,所提算法的總吞吐量提升速度高于單一優化IRS方法實現的總吞吐量。這是因為,單一優化IRS的方法采用初始UAV的飛行軌跡,這導致UAV始終與IRS保持較遠的距離,當UAV信號通過IRS反射至GUs時,會經歷嚴重的路徑損耗。而所提出算法通過發揮UAV移動性,使得UAV靠近IRS與GUs來獲得更好的信道條件,因此其吞吐量隨IRS元件數量提升明顯。同時,單一優化UAV的方法所獲得的總吞吐量和IRS元件數量間沒有明確關系,這是由于隨機優化IRS相移不能保證信號在UAV處對齊合并,甚至相互抵消。綜上所述,與單一優化方法相比,所提出算法通過聯合優化IRS相移與UAV軌跡,可以實現更好的性能。
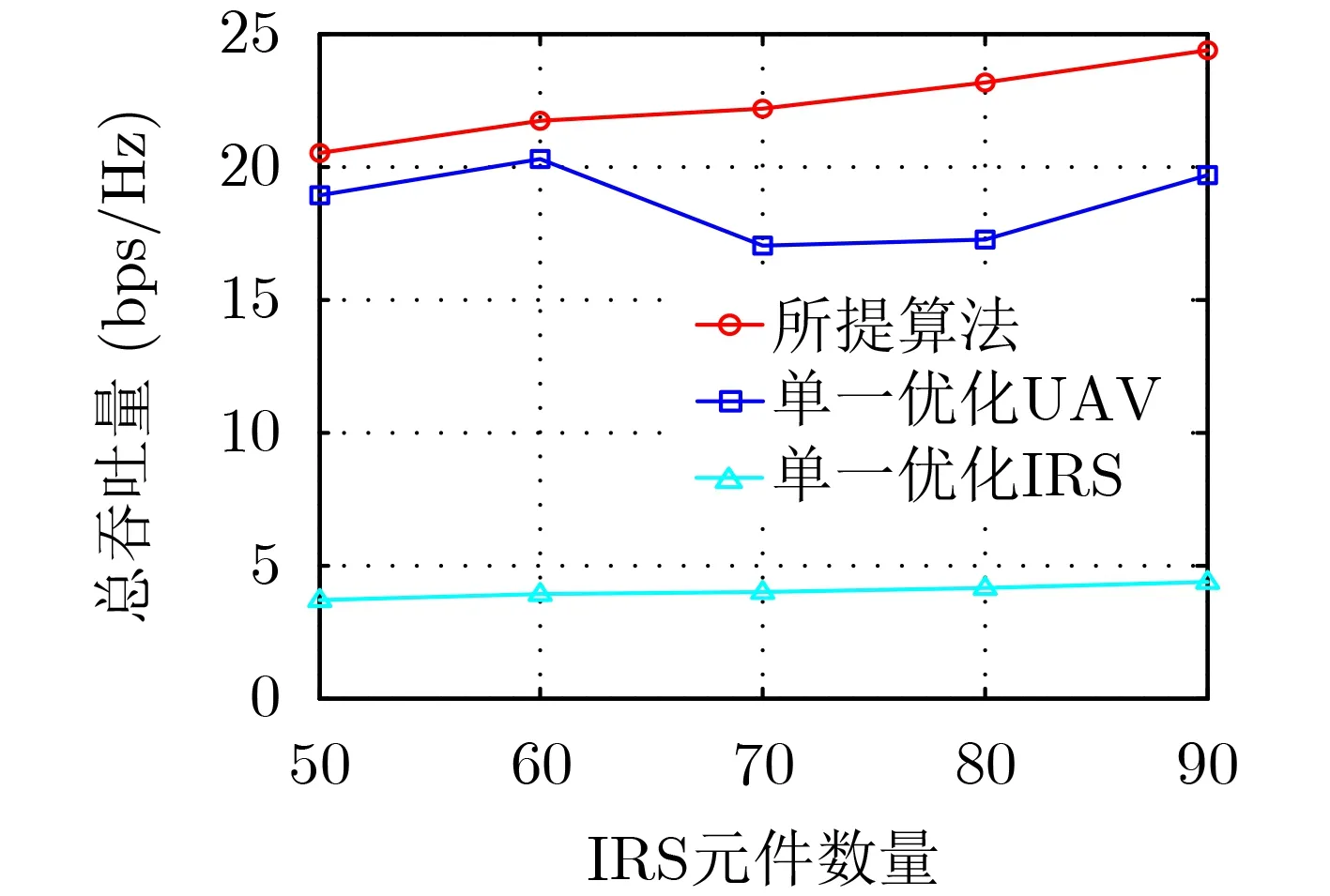
圖6 總吞吐量與IRS元件數量的關系
5 結論
本文研究了IRS輔助的UAV無線供能通信系統下資源分配問題。考慮了IRS和GUs的能量因果、IRS相移和UAV移動性等約束,建立了多變量耦合的系統最大化總吞吐量問題。通過BCD方法將原問題分解為3個易于處理的子問題,并利用三角不等式、引入松弛變量、1階泰勒展開和SCA方法對子問題進行求解。數值仿真表明,所提算法具有良好的收斂性,且可以有效地提高系統總吞吐量。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34