基于ADAMS和Simulink鉸接汽車轉向系統特性分析
2022-07-27 13:54:02宋美玉王旭榮彭偉利
機械設計與制造 2022年7期
關鍵詞:汽車
宋美玉,王旭榮,彭偉利
(1.山東交通職業學院,山東 濰坊 261206;2.山東大學,山東 濟南 250061)
1 引言
為了增加礦物的運輸效率,在近些年的研究開發中,鉸接式礦用汽車的運行速度得到了很大的提升,完美地解決了運輸效率的問題。當前,隨著很多礦區通道修建的更加合理,更加適合鉸接式礦用汽車的通過[1]。同時,鉸接式礦用汽車的轉向系統采用雙油缸“缸體前置式”布置,在轉向過程中,左右兩個油缸一個伸長另一個縮短,從而為汽車的轉向提供動力[2]。在保證礦用卡車的行駛穩定性以及安全性能的同時,鉸接式礦用汽車的最高時速也在不斷地得到提高。而當鉸接式礦用汽車在高速運行時遇到轉彎的巷道時,需要及時減速,并以相對安全的速度通過轉彎的巷道。這種情況在每個礦區都會經常遇到,因此,通過獲取轉向油缸的行程和汽車的轉向角度關系,進而對制動轉向工況的運行軌跡進行分析,以獲取最佳的轉彎半徑。
國內外學者對此開展了一定的研究:文獻[3]在行走車輛上安裝劃印裝置,可在地面上畫出行走痕跡,然后測定該痕跡從而獲得行走軌跡;文獻[4]在行走車輛上裝有水箱,控制適當的水流量,使水滴在走過的地面上,以此來檢測行走軌跡;文獻[5]利用其它比較精確的測量裝置(如傳感器等)進行測量,直接獲得車輛行駛的軌跡曲線。文獻[6]利用三維建模的方式,分析交接式車輛的轉向半徑及運行軌跡。
針對雙油缸“缸體前置式”布置的鉸接式礦用汽車轉向系統進行分析,獲取油缸行程和整車轉向角度之間的關系,并對轉向半徑進行分析。基于ADAMS建立多自由度整車分析模型,并與Simulink建立的轉向模型相結合,模擬車輛運行環境,選取滿載緊急轉向工況和高速轉向工況等進行運動特性和轉向軌跡分析。
2 轉向系統特性分析
鉸接式礦用汽車的前后兩個車體經銷軸連接在一起,依靠前后車架之間的相互偏轉達到轉向的目的。該瞬時轉心的位置隨著轉向角的變化而變化,因此,鉸接式汽車前后車輪的轉彎半徑也是隨著轉向角度的變化而變化的[7],如圖1所示。
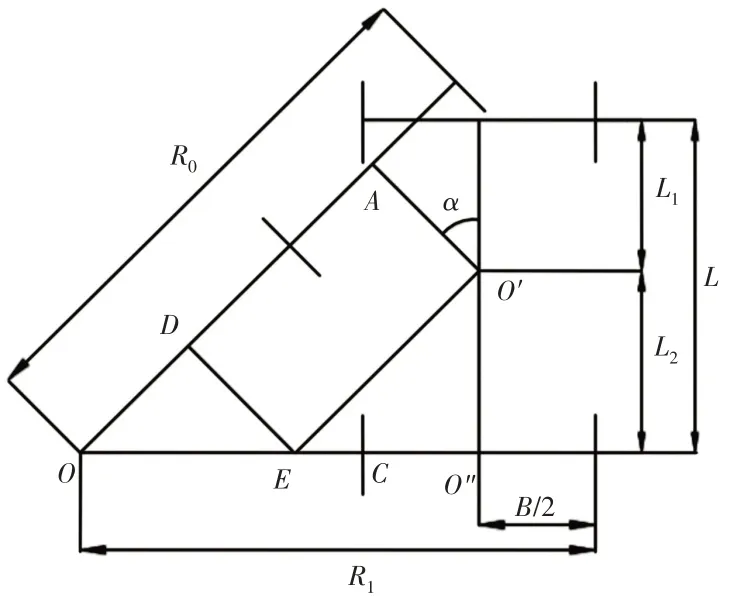
圖1 轉彎半徑示意圖Fig.1 Diagram of Turning Radius
圖中:L1—前橋中心到鉸接點的距離;L2—后橋中心到鉸接點的距離;B—前后橋兩輪之間的距離;假設在轉過α角度之后,前后外側車輪的轉彎半徑分別表示為R0、R1。
從圖中可以得到:
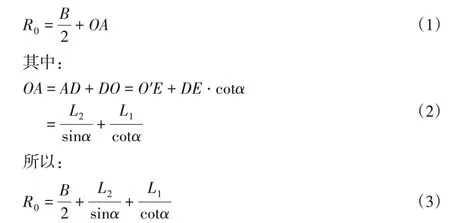
式中:α—轉向時前后車體間夾角,即轉向角,通常為(35~45)°[8]:
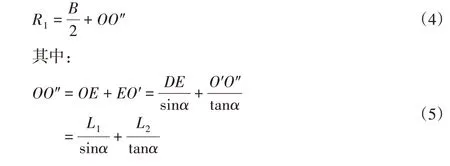
因此可得:

則,前內輪和后內輪的轉彎半徑分別為:
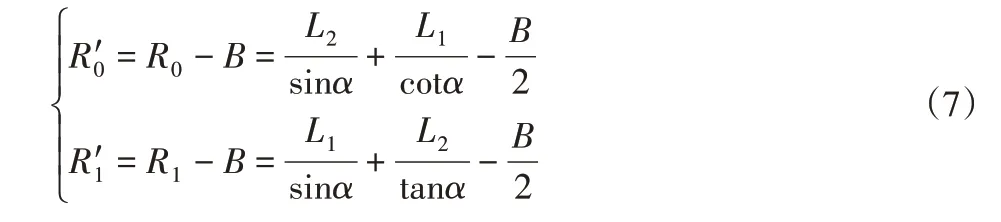
從以上兩式可以看出:
當L1>L2時,前橋轉彎半徑大;當L1<L2時,后橋轉彎半徑大;當L1=L2時,R0=R1,即前后橋轉彎半徑相等。
3 基于聯合模型極限工況特性分析
3.1 分析模型
以某載重為60t的地下鉸接式汽車為研究模型,基于Solid-Works搭建整車模型,導入ADAMS建立多自由度分析模型;基于以上轉向特性的分析,基于Simulink搭建分析模型,聯合整車模型和轉向控制系統模型,如圖2所示。
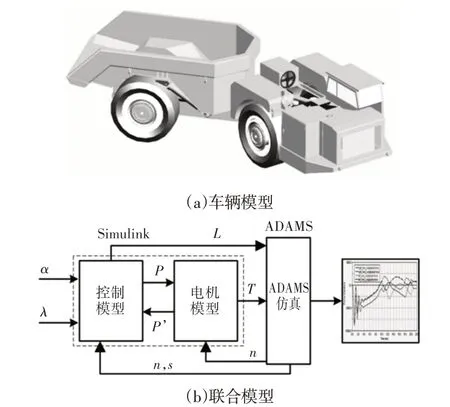
圖2 整車分析模型Fig.2 Vehicle Analysis Model
在建立模擬礦區的路面時,選擇±150mm為路面的幅值,建立了一個長61000mm,寬17500mm的不規則路面,并在其中隨機插入了一些±200mm的特殊路面,并在此路面下進行了轉向行駛軌跡的模擬仿真,如圖3所示。

圖3 礦區運行模擬地面Fig.3 Simulated Ground Operation of Mining Area
3.2 制動轉向工況分析
車輛以較高的車速運行時,突然發生轉向時,車輛需要及時制動,之后轉向,這里采用控制車輛驅動力的方式,實現對車輛運行速度的控制。開始階段,施加較大的驅動力,車輛具備較大的加速度,運行速度迅速增加,之后進入轉彎工況,實現邊制動邊轉向。
在該工況下,鉸接卡車在行駛過程中,速度和加速度的變化曲線,如圖4所示。制動過程,車輛的運行軌跡,如圖5所示。
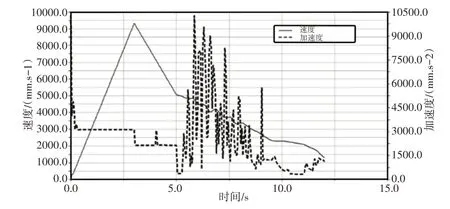
圖4 速度和加速度曲線Fig.4 Velocity and Acceleration Curves
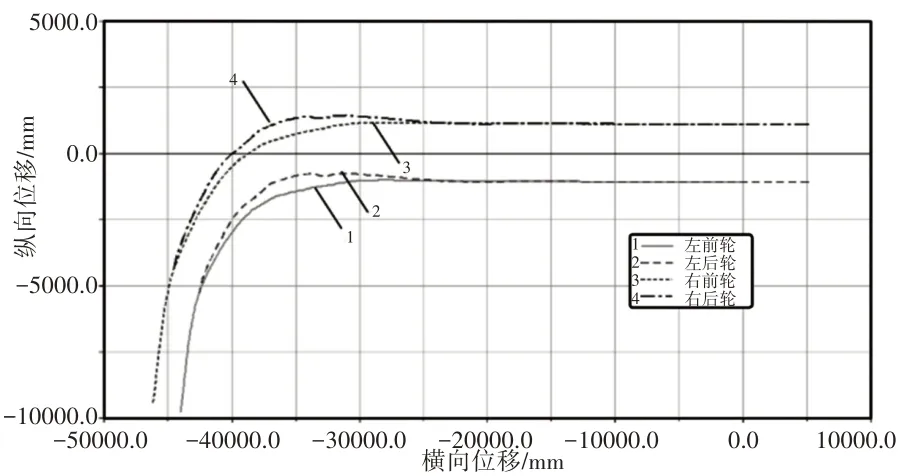
圖5 車輛運行軌跡曲線Fig.5 Vehicle Trajectory Curve
由圖中分析結果可知,加速階段,車輛的最大速度為9500mm/s,之后進入減速階段;整個過程中,加速度曲線變化較大,車輛經歷了緊急和平緩兩個階段,最終實現較低的速度運行,而綜合作用下,車輛的速度變化平緩,保證了整車的安全運行。
從制動轉向軌跡的圖中可以看出,車輛轉向時,出現一定程度的側滑,與設備參數、運行狀態等密切相關。該車在低速轉彎的時候不會出現側滑或者側傾的現象。此處車輛減速的函數顯示,減速過程是一個緩慢的過程,這是為了使車輛不至于突然減速而出現失穩現象。因此,參數設置時,車輛在制動轉向工況的速度較大,出現側滑,除此之外,整個轉向過程相對平穩,未出現其他不良工況。
整個過程中,前后車體角速度和重心變化,如圖6所示。
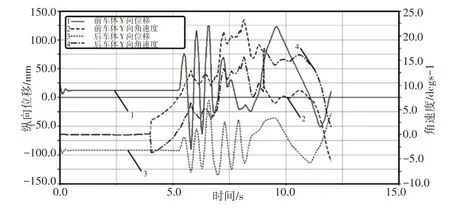
圖6 制動轉向前后車架重心曲線Fig.6 Center of Gravity Curve of front and Rear Frame
圖中分析結果可知,整個過程中,前后車體的Y向角度變化基本一致,且與實際情況相符,由于出現了輕微側滑,因此后期角速度的變化幅度略大;前后車體的Y向位移保持一致,符合實際情況。
3.3 高速行駛轉向工況
當車輛行駛速度較高并遇到轉向通道的時候,一般會先把速度降低到適合轉向動作的范圍內再進行轉向動作[11]。為了形成較好的對比效果,對車輛在較高速度下的轉向行駛狀態也進行模擬。將驅動力的方程修改為:

轉向油缸上的MOTION方程不變。加速度曲線,如圖7所示。
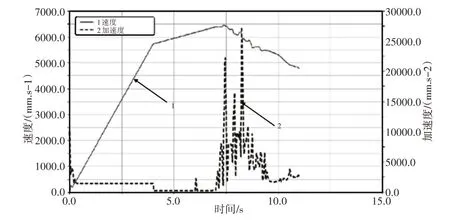
圖7 速度和加速度曲線Fig.7 Velocity and Acceleration Curves
由圖可知,車輛在充分加速之后,行駛的速度很快,在整個加速過程,車輛行駛都比較平穩,而在勻速行駛過程中,車輛的加速度不太穩定,速度開始出現波動,好在轉向過程接近尾聲時,車輛的速度才出現了明顯的下降,但是其對軌跡不會造成太大的負面影響。高速行駛、勻速轉向行駛軌跡曲線,如圖8所示。
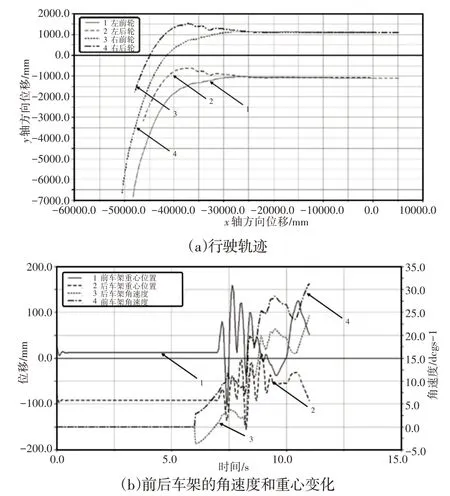
圖8 高速行駛、勻速轉向工況分析結果Fig.8 Analysis Results of High Speed Driving and Uniform Steering Condition
由圖8(a)可以看出,車輛在行駛過程中極其不穩定,后車架出現了較大的偏移現象,車輛有漂移的跡象。且前輪在地面上也有嚴重側滑現象發生。
從圖8(b)可以更明顯地看出,車輛的重心變化明顯,行駛極其不穩定。因此,在高速狀態下進行轉向動作是十分危險的,容易造成車輛的損壞。
4 結論
(1)當L1>L2時,前橋轉彎半徑大;當L1<L2時,后橋轉彎半徑大;當L1=L2時,R0=R1,即前后橋轉彎半徑相等;
(2)為保證轉向過程中,車輛不發生側滑現象,需要提前采取制動措施,使得車輛的運行速度低于10m/s;
(3)鉸接式車輛轉向過程中轉向軌跡與前后車橋中心到鉸接點距離是有一定的關系的,鉸接點位置的布置是影響鉸接汽車行駛軌跡的一個重要因素,設計中需要加以注意。
猜你喜歡
人民交通(2020年22期)2020-11-26 07:36:44
小學生優秀作文(低年級)(2020年4期)2020-07-24 08:31:08
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車與安全(2019年8期)2019-09-26 04:49:10
汽車與安全(2019年5期)2019-07-30 02:49:51
汽車觀察(2019年2期)2019-03-15 06:00:06
汽車與新動力(2018年2期)2018-05-09 00:31:56
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
