高壓共軌柴油機軌壓閉環控制模擬仿真研究
2022-07-27 13:53:06李捷輝陳海龍
機械設計與制造 2022年7期
關鍵詞:模型
李捷輝,魏 帥,陳海龍
(江蘇大學汽車與交通工程學院,江蘇 鎮江 212013)
1 引言
隨著車輛排放法規的日益嚴格,對發動機電控系統性能提出了更高的要求。高壓共軌系統作為現代電控柴油機核心部件,在節能減排方面發揮著積極的作用。軌壓控制是高壓共軌柴油機控制的重要組成部分,其控制品質決定著噴油量的準確性、發動機的燃燒特性以及供油系統效率,直接影響到發動機的動力性、經濟性和排放性。故卓越的穩定軌壓跟蹤和動態響應性能一直是發動機控制研究的熱點。
高壓共軌系統是一個非線性時變控制系統,其控制器的設計具有一定的難度。為了解決軌壓控制問題,在控制系統中一般使用PID控制器作為核心。2010年文獻[1]和2016年文獻[2]分別根據基本PID 和PID+[3]控制算法對軌壓進行跟蹤,消除軌壓波動。2015年文獻[4]根據經驗公式設計了一種綜合PID軌壓控制策略,由閉環控制壓力釋放閥(PCV)和流量計量閥(MeUn)實現了軌壓跟蹤控制。此外,文獻[5-7]也使用PID控制算法對軌壓控制,并獲得了較好控制效果。然而比例、積分和微分系數的整定是PID控制算法的一個重要環節,需要占用大量的時間和試驗資源,不利于控制模型移植和應用。
為解決PID控制器現存問題,國外學者也進行了基于物理模型的軌壓控制研究。文獻[8]提出一種混合控制模型,基于時間觸發的控制器,有效解決執行機構與高壓油泵控制的漂移問題,提高軌壓控制穩定性和準確性。文獻[9]提出一種柴油機高壓共軌系統物理模型,設計滑膜控制器實現軌壓的控制。當前隨著計算機技術的快速發展控制器計算能力不斷提高,通過系統物理模型構建控制系統在工程應用中越加廣泛[10]。
為此,這里基于高壓共軌柴油機燃油噴射系統物理結構,推導軌壓控制通用方程,運用Simulink 搭建控制模型,通過與AMESim建立的高壓共軌燃油噴射系統被控模型進行聯合仿真,實現軌壓精確控制和精準跟蹤。
2 軌壓控制方程
高壓共軌系統結構主要包括高壓油泵、共軌管、噴油器和ECU控制器,組件構成,如圖1所示。軌壓跟蹤是通過控制MeUn計量閥的開度影響進入共軌內的燃油質量,進而間接實現軌壓跟蹤。所以,軌壓與MeUn計量閥需求流量之間的函數關系是軌壓控制系統建立的關鍵。
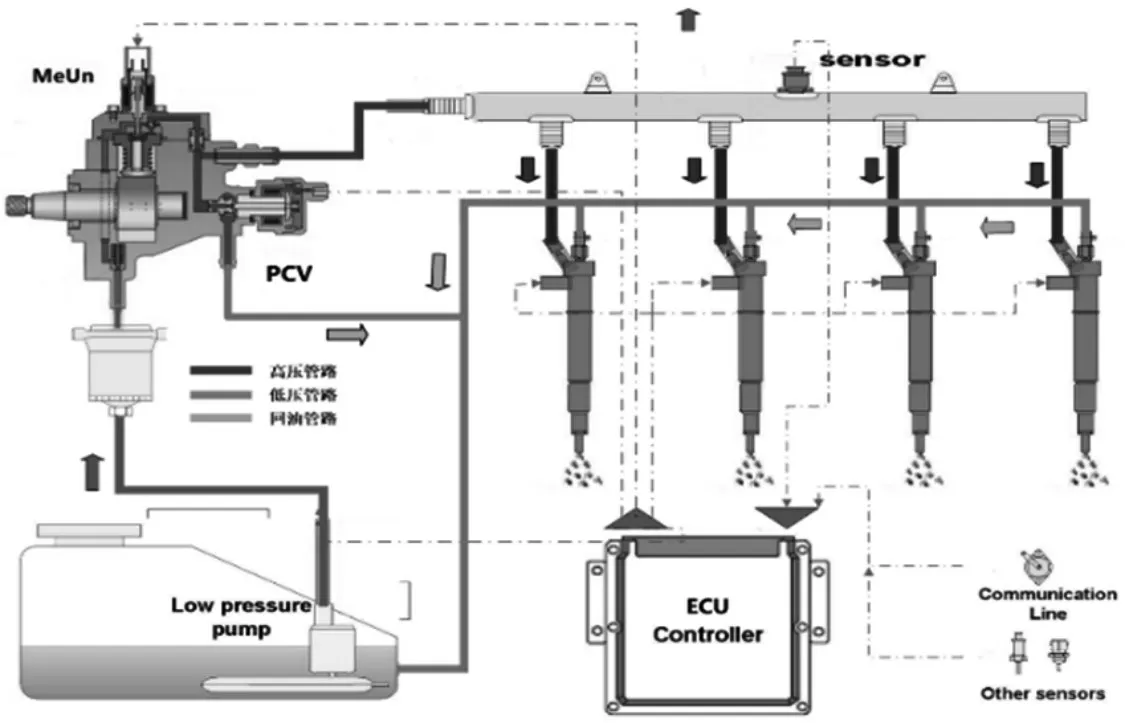
圖1 高壓共軌燃油噴射系統Fig.1 High Pressure Common Fuel Injection System
根據質量、密度和體積(ρV=M)的物理關系,當共軌管容積一定時,密度改變時,則質量變為:

將燃油看作可壓縮體,壓力與密度的數學方程為:

式中:dρ—壓力引起的密度變化量;dp—軌壓變化量。
柴油的彈性模量一般與壓力有關,根據文獻[11]可得到Kf彈性模量與壓力的關系式為:

對式(2),進行時間微分處理,得到:

式中:dm/dt—高壓段(高壓段是指與共軌管內壓力相等的所有容積)燃油質量變化率;V—高壓燃油的總體積;ρ—燃油密度。
將高壓段視為一個整體系統,在dt時間段內流入高壓段燃油的質量和流出高壓段燃油質量之差,即為高壓段燃油質量的變化dm,即:

式中:qmi—流入高壓段的燃油質量流量,即從高壓油泵壓入高壓段的燃油質量流量;qmo—流出高壓段的燃油質量流量。由于高壓油泵供油速率與MeUn計量閥占空比和油泵轉速有關,可設;dr—MeUn 計量閥占空比;n—油泵轉速;qmo—噴油器開啟以及PCV閥開啟燃油質量流量之和,若不考慮PCV 閥的作用,則qmo僅與噴油器開啟有關,而噴油速率與噴油脈寬、軌壓有關,故令qmo=g(p,t);P—軌壓,則式(4)可寫為:

式中:ω—油泵角速度;τ—高壓油泵供油時滯后角度(τ=180oCA),高壓油泵內的柱塞轉過τ角度后才能向共軌管內壓入燃油,則—MeUn 計量閥進油的滯后時間;δ(t)—噴射脈寬信號,處于噴油狀態時,令δ(t)=1,否則δ(t)=0。
對式(6)兩邊積分得:

將式(7)中噴油量部分提出,令積分區間為柴油機一個工作循環,其積分結果為一個工作循環總噴油量MInj,即式(8)所示:

當式(8)的積分區間下限選擇當前時間tc,經延遲τ角度之后,積分上限變為ts,即ts=τ/ω+tc,則積分區間內平均噴油量等于τ除以360°CA(一個工作循環),再乘以一個工作循環總噴油量,即:

式中:Mmo—積分區間內平均噴油量。
式(7)在[tc,ts]積分區間整理得到軌壓偏差控制方程為:

式中:Ps—目標軌壓;Pr—當前軌壓。
由于軌壓變化的頻繁性,為滿足控制精度,以5ms作為MeUn計量閥控制周期時間,控制對象為每個柱塞的進油量。
同時,將控制算法離散化處理,控制間隔時間設為T,令T=5ms,式(10)離散化結果為:
3 軌壓控制建模
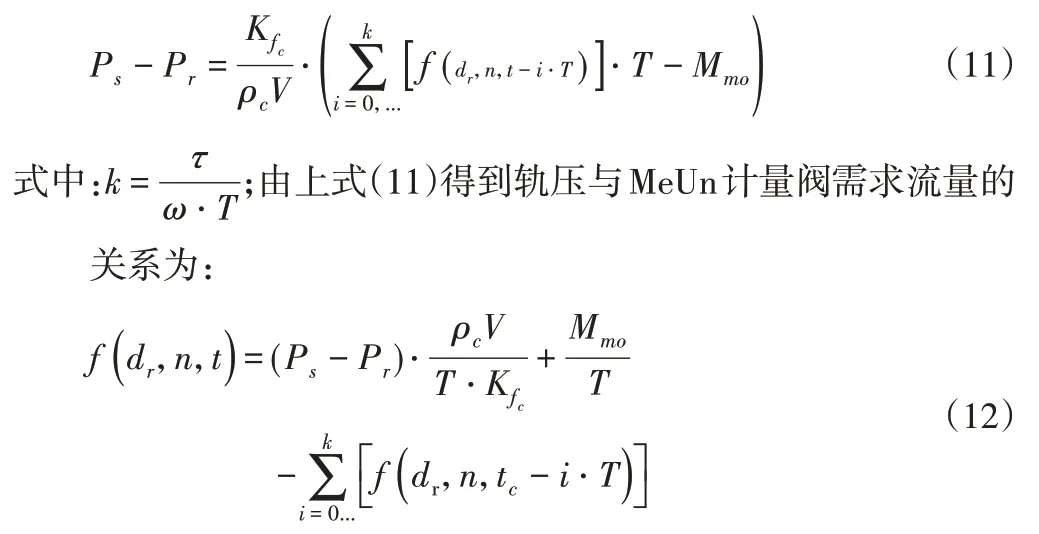
根據軌壓控制方程,軌壓控制模型主要包含軌壓控制狀態機、MeUn計量閥需求流量計算模塊以及流量計量閥控制模塊,如圖2所示。
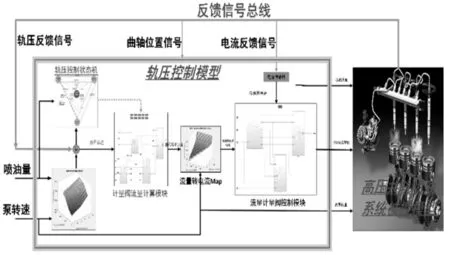
圖2 軌壓控制架構圖Fig.2 The Structure of Rail Pressure Control
軌壓控制狀態機根據系統實時運行參數判斷當前控制系統的狀態,從而選擇相應的MeUn計量閥需求流量計算方式;針對MeUn計量閥需求流量計算模塊建模依據式(12)中的三項,分別建立三個子模塊,通過各部分控制參數之間的交換,建立子模塊之間的連接,實現MeUn計量閥對燃油需求流量的控制。
計算得到的MeUn 計量閥需求流量再根據Map 查表得到MeUn計量閥的開度電流,通過MeUn計量閥控制模塊精確跟蹤電流并控制其開度。
3.1 軌壓控制狀態機模型
軌壓控制方式是由當前柴油機狀態和共軌系統中轉速、軌壓偏差等參數共同確定。正常運轉情況下,軌壓控制狀態機在開環控制、閉環控制和開閉過渡控制模式之間進行轉換。
軌壓控制狀態機根據柴油機軌壓偏差值、轉速、絕對軌壓以及噴油使能狀態位等參數對軌壓控制模式進行轉換,控制模式之間的轉換關系,如圖3所示。
圖3 軌壓控制狀態轉換機制邏輯關系Fig.3 The Switch Logic Relationship of Rail Pressure Control State Machine
當柴油機在軌壓超限工況、起動工況以及實際軌壓與目標軌壓超出設定范圍時,軌壓控制狀態機進入開環控制模式。當目標軌壓與實際軌壓之差減小至設定值(Rail_pdvtOpenLim)且轉速大于260r/min時,軌壓控制狀態機進入開閉環控制模式。
在正常工作狀態下,噴油系統和供油系統狀態位已使能,實際軌壓與目標軌壓偏差值小于設定值時,由開閉環控制模式進入閉環控制模式。三種控制模型間的邏輯關系經Simulink/Stateflow軟件建模,如圖4所示。
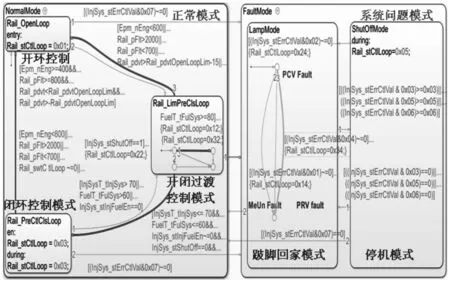
圖4 軌壓控制狀態機模型Fig.4 Rail Pressure State Machine Modelling
不同控制模式下,軌壓狀態機輸出值,如表1所示。

表1 軌壓狀態機輸出結果和含義Tab.1 The Output Result and Meaning of Rail Pressure State Machine
3.2 計量閥需求流量計算
在開環模式下,軌壓控制狀態機狀態位輸出0×01,供油量由軌壓偏差正負決定。當與目標軌壓偏差大小為負值時,表明目標軌壓小于真實軌壓,此時高壓油泵停止供油,相應地MeUn流量計量閥關閉,否則MeUn流量計量閥全開,開環模式下流量的計算模型,如圖5所示。
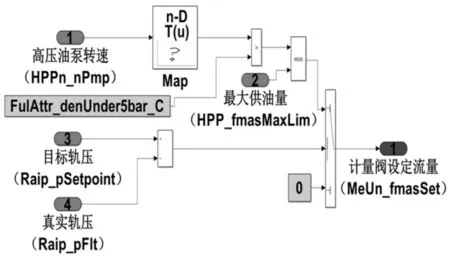
圖5 開環模式流量計算模型Fig.5 Flow Calculation Modelling Under Opened-Loop Mode
在開閉環過渡模式下,軌壓控制狀態機狀態位輸出0×02。處于過渡工況時,MeUn計量閥計算模塊根據Ps -Pr之差和軌壓需求流量偏差f(dr,n,t)進行計算。MeUn計量閥燃油質量流量的表達式,如表2所示。
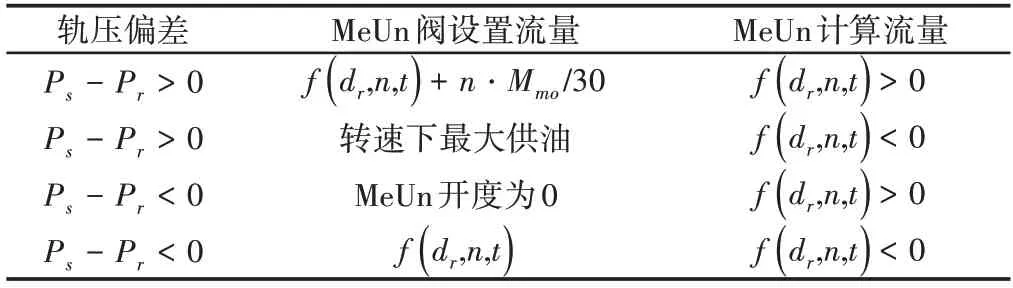
表2 Ps -Pr,f( dr,n,t)以及MeUn計量閥需求流量關系Tab.2 The Relation Between Ps -Pr,f( dr,n,t)and MeUn Demand Flow
由表2的開閉環控制策略建模,如圖6所示。
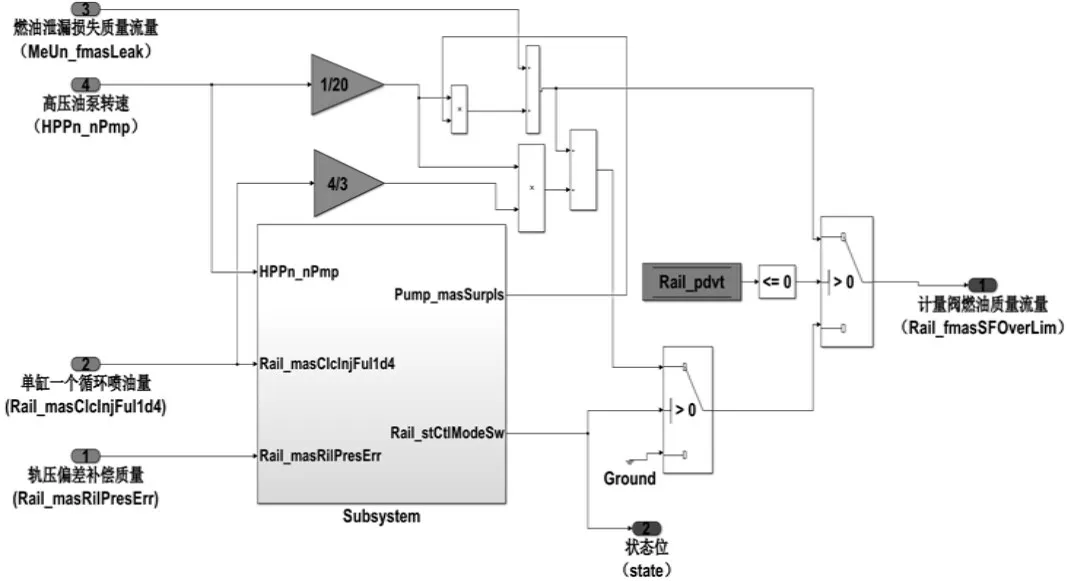
圖6 開閉模式計量閥流量計算模型Fig.6 Flow Calculation Modelling Under Transition Mode
在閉環控制模式中,軌壓控制依據式(12)計算MeUn計量閥流量,MeUn計量閥流量計算模型,如圖7所示。由于高壓油泵壓油柱塞在吸油和壓油過程中凸輪軸轉角分別轉過180°CA 且MeUn計量閥位于高壓油泵供油管前端,使得MeUn計量閥控制軌壓存在遲滯現象。所以,在閉環控制模式下穩態軌壓跟蹤必須著重考慮壓油柱塞腔內存儲的燃油質量。
此模式下,對軌壓進行穩態跟蹤,式(12)中軌壓偏差流量值較小,僅能夠對軌壓進行微調,為達到對軌壓的穩定跟蹤,此時需要使每個壓油柱塞腔內存儲的燃油質量為MInj3。
4 高壓共軌系統被控模型
由高壓共軌系統物理結構,建立高壓共軌系統物理模型和聯合仿真接口。以此替代油泵實驗臺進行仿真。
4.1 高壓共軌噴射系統液壓系統模型
根據高壓共軌系統物理結構搭建高壓共軌系統的被控模型,如圖8所示。
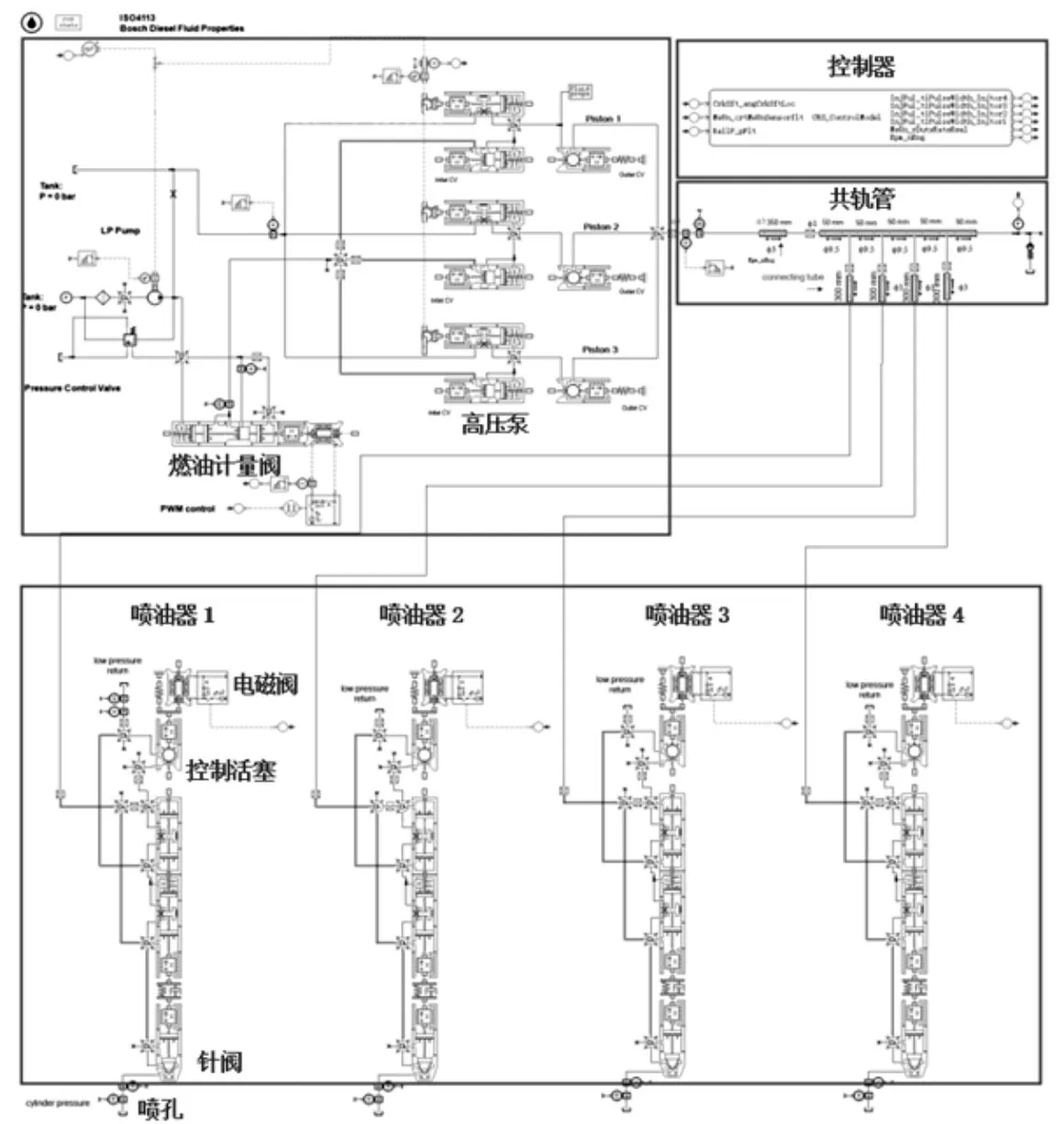
圖8 高壓共軌系統被控物理模型Fig.8 The Controlled Model of High Pressure Common Rail System
被控物理模型包括高壓油泵、共軌管、控制器和4個噴油器。其中高壓油泵由3個互呈120°夾角的柱塞和MeUn計量閥以及低壓油泵等主要部件組成(柴油機轉速與高壓油泵轉速比為2:1)。MeUn計量閥的電磁線圈與PWM驅動電路連接,MeUn計量閥接收來自Simulink軟件的PWM占空比信號。
MeUn計量閥電磁線圈中的電流通過傳感器反饋至控制器作為輸入參數。
共軌管上裝有機械泄壓閥和壓力傳感器,機械泄壓閥作用是防止軌壓過高,壓力傳感器作用是采集軌壓信息。噴油器的控制端與控制器接口(InjFul_tiPulWthInj1~4)相連,通過噴油脈寬來控制噴油。
在圖8中,控制器是由Simulink軟件搭建的控制模型輸入/輸出接口,主要負責傳感器信息采集和執行器信號傳輸。
4.2 聯合仿真及接口
在聯合仿真模型中,Simulink 模型作為主控端,AMESim 模型作為從屬控制端。基于噴油器噴油脈寬控制的需求,采用離散解算器且步長設置為10-6s。
聯合仿真的模型,如圖9所示。
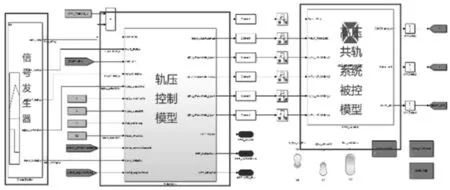
圖9 聯合仿真模型Fig.9 Co-Simulation Modelling
模型分為三部分,分別為信號發生器、軌壓控制模型和高壓共軌噴油系統物理被控模型。其中信號發生器用以輸入柴油機高壓共軌系統狀態信息,包括噴油量和轉速。
軌壓控制模型和高壓共軌噴射系統被控物理模型聯合仿真的輸出與輸入信號接口名稱、數據傳輸方向和信號定義,如表3所示。

表3 輸出和輸入信號傳輸方向及定義Tab.3 The Transmitted Direction and Meaning of Output and Input Signal
5 軌壓控制與跟蹤仿真
針對車用柴油機運行特點,在多變工況下進行聯合仿真,首先,以典型非道路工程車輛匹配柴油機運行工況為基礎,設定定轉速變負載工況進行測試。
其次,以道路行駛車輛匹配柴油機運行工況為基礎,設定變轉速定負載工況進行測試;最后,為了全面試驗柴油機的多方位用途,實行全方位的變轉速變負載工況測試。
仿真范圍覆蓋發動機萬有特性圖中的常用工況,以實現不同工況對軌壓的控制,檢驗控制器對軌壓跟蹤和動態響應的性能。
經過前期的充分準備和不斷調試修改,仿真測試在一臺裝有MATLAB/Simulink 軟件和AMESim 軟件的PC 機上進行,測試分為三部分:
(1)油泵轉速不變噴油量改變,模擬柴油機定轉速變負載工況。
(2)噴油量相同轉速變化,模擬柴油機定負載變轉速工況。
(3)轉速和噴油量同時變化,模擬柴油機急加/減速工況。
5.1 定轉速變負載仿真測試
轉速不變負載改變是柴油機的常用工況,例如車輛定速巡航。在軌壓控制模型的性能測試中,設置發動轉速為2000r/min,噴油量為20mm3/per、50mm3/per、85mm3/per 三個工況點,軌壓跟蹤、MeUn計量閥流量以及MeUn計量閥電流跟蹤仿真結果,如圖10所示。
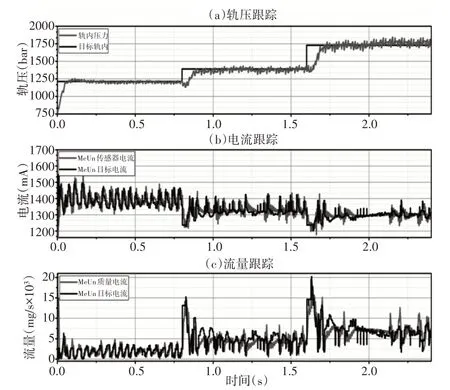
圖10 定轉速變負載的軌壓跟蹤Fig.10 The Rail Pressure Tracking for the Condition of Same Engine Speed with Different Load
由圖10(a)可見,在轉速不變的情況下隨負載的增加,噴油量增加,軌壓波動幅度越來越大,并且軌壓波動基本上等于單次噴射軌壓下降量,表明軌壓跟蹤平穩性較好。
由于軌壓的波動變化主要與噴油量和共軌管容積有關,單次噴油量越大且共軌管容積越小,軌壓波動越劇烈,反之亦然,所以軌壓波動隨噴油量增加而增大符合客觀規律。
在仿真時間t=0.8s時,柴油機工況發生改變,目標軌壓需求增加,此時圖10(b)、圖10(c)中MeUn計量閥電流迅速減小,而經MeUn 計量閥的燃油流量快速增加,軌壓迅速從1212bar過渡到1392bar目標軌壓,耗時大約0.1s,并且未出現軌壓超調和跟蹤延遲過大問題,表明軌壓跟蹤的實時性和響應性較好。
5.2 定負載變轉速仿真測試
定負載變轉速通常出現在汽車上坡下坡等工況,柴油機通過降低轉速提高轉矩。在軌壓控制模型的性能測試中,設置單次噴油量為60mm3/per,轉速設置成斜坡上升過渡形式,分別設為800r/min、1800r/min、2600r/min以及3600r/min。
由圖11(a)可見,隨著柴油機轉速的升高,軌壓波動的頻率不斷增大,而軌壓波動的幅度并沒有增加,基本等于單次噴射軌壓下降量。
在轉速發生變化時,圖11(b)、圖11(c)中MeUn計量閥電磁線圈中的電流相應減小而燃油流量同時增大,緊跟軌壓變動需求趨勢。
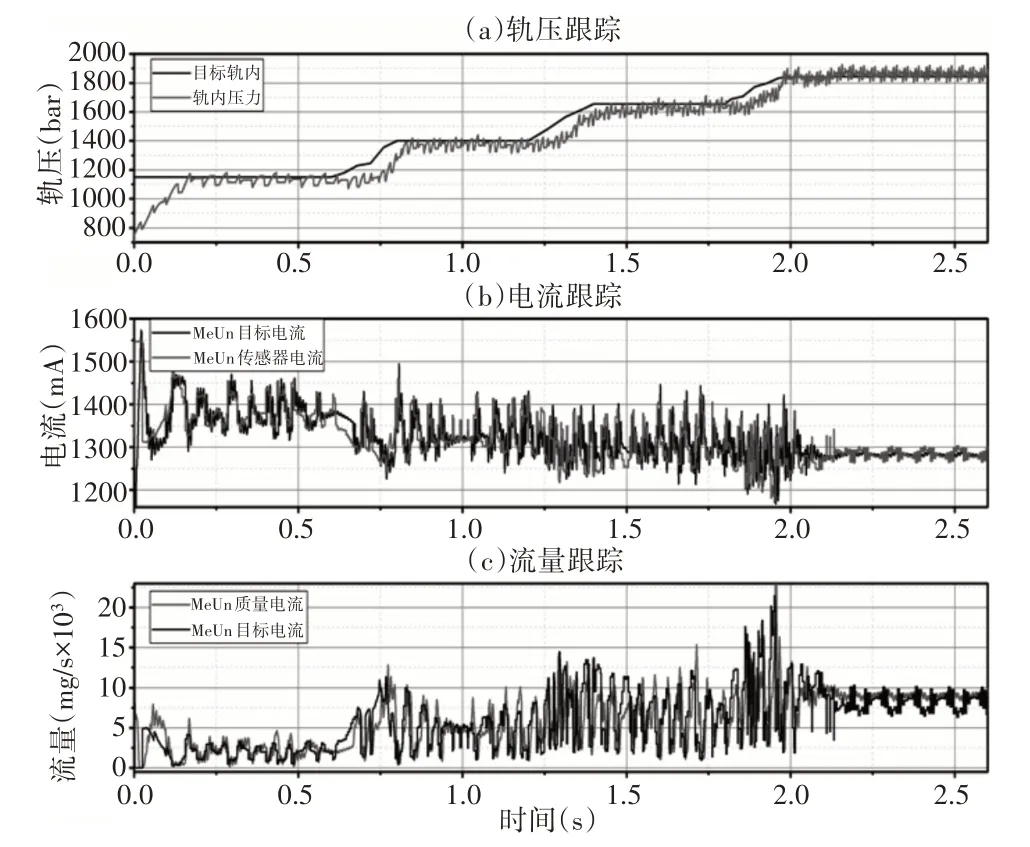
圖11 定負載變轉速的軌壓跟蹤Fig.11 The Rail Pressure Tracking for the Condition of Same Load with Different Speed
隨著轉速的升高,MeUn計量閥電磁線圈的電流平均值在不斷減小,由于當單次循環供油量不變而轉速提高,那么單位時間內MeUn計量閥流過的流量是隨著轉速不斷提高的,所以MeUn計量閥開度相應增大,與其對應的電流值自然相應減小,符合客觀規律。
5.3 變負載變轉速仿真測試
車用柴油機絕大部分工況處于頻繁的加/減速過程中,則目標軌壓力必然發生頻繁變化。
為滿足車用柴油機急加/減速對軌壓動態跟蹤性能的檢測,設計的變轉速變負載工況,如圖12所示。
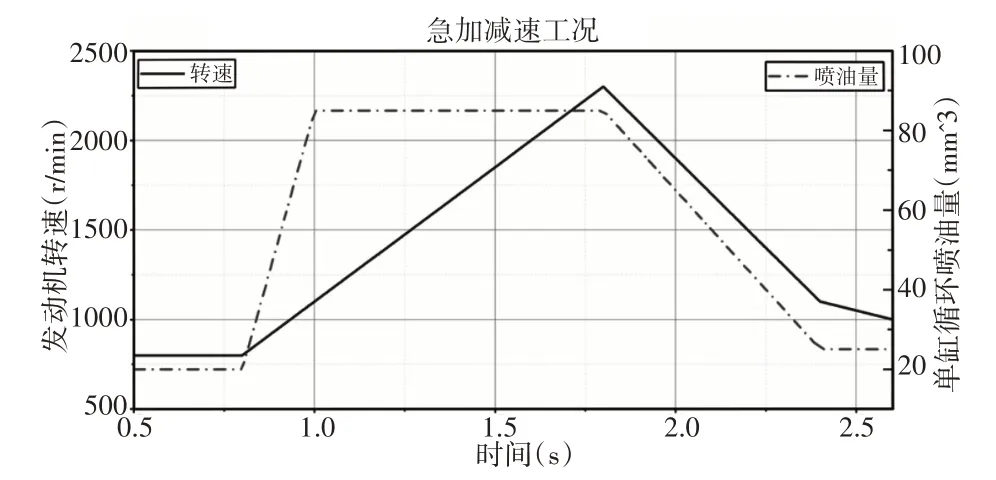
圖12 柴油機運轉工況Fig.12 Engine Operating Condition
變負載變轉速的急加/減速工況軌壓跟蹤,如圖13所示。

圖13 變轉速變負載的軌壓跟蹤Fig.13 The Rail Pressure Tracking for the Condition of Variable Load and Speed
在t=(0~0.5)s的準備期后,(0.6~1)s之間,隨著仿真時間推移軌壓偏差值快速增大,這是由于柴油機在低速時,供油速率較小,而噴油量要求快速增加,出現滯后現象,導致共軌內燃油凈增加量較慢,實際軌壓上升較慢,但當轉速快速上升后實際軌壓與目標軌壓偏差將逐漸變小。
在1s <t<1.8s間,軌壓波動幅度和頻率隨著柴油機噴油量和轉速的提高而增大,再綜合前面的數據分析可以得出軌壓波動與噴油量和轉速的關系為:軌壓波動幅度是隨著噴油量的增大而增大,而軌壓波動頻率是隨著柴油機轉速的增加而增加。
當t>1.8s后,柴油機進入急減速工況,軌壓需求下降,但是實際軌壓并未立刻降低,而是繼續增加一段時間,導致這種現象的原因是高壓油泵供油柱塞吸油和壓油過程滯后于MeUn計量閥的控制,當需求發生變化時,在柱塞腔內仍然保留著前一個調控周期的需求燃油量,同時噴油量大幅減少,共軌內燃油進入量多于出油量,所以軌壓不能立刻減少。
在此后的軌壓跟蹤中,軌壓總體趨勢基本能夠緊隨目標軌壓總體趨勢逐步減少,當柴油機再次進入穩態工況,實際軌壓又與目標軌壓趨同且保持穩定。
6 總結
根據高壓共軌系統的物理結構提出了一種新型軌壓控制算法,算法模型運行穩定可靠,能夠適應柴油機不同工況下的軌壓需求,可實現軌壓的精確控制。
根據控制方程搭建了軌壓控制模型,通過與AMESim軟件構建的高壓共軌噴射系統物理模型聯合仿真進行驗證,實現了精準軌壓跟蹤控制。
仿真結果表明:在柴油機各工況下軌壓穩態跟蹤性能良好,軌壓波動穩定且幅值變化較少,單次噴射中軌壓下降量均在穩態軌壓波動幅值內。
在瞬態工況下控制系統響應快速,能夠緊隨目標軌壓,實現穩定的跟蹤;在過渡工況下軌壓跟蹤平穩,未出現超調和延遲過大問題。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
