公交投幣機紙幣模塊結構與控制系統設計
2022-07-27 13:52:56黃嘉興戚義鵬朱云鵬
機械設計與制造 2022年7期
關鍵詞:檢測
黃嘉興,黃 希,戚義鵬,朱云鵬
(南通大學機械工程學院,江蘇 南通 226019)
1 引言
隨著人們環保意識的增強和公共交通服務的完善,越來越多的人選擇乘坐公交、地鐵等公共交通方式出行。我國現階段使用的公交投幣機功能單一,多數不能自動找零,乘客必須自備零錢,人們常常會因沒有足夠零錢乘車而困擾。由于公交車費的特殊性,小面額紙幣流通不暢,全國的公交公司不同程度存在零錢票款積壓問題。此外,由于投幣機不具備紙幣清分計數功能,公交公司只能通過人工清點的方式,進行紙幣和硬幣的分離整理、分類計數等工作,因而工作效率低下且人力成本較高[1]。我國在部分省市推行1元硬幣化試點,但我國北方大部分地區仍以紙幣支付為主。另外,網絡支付雖逐漸普及,但農村地區尤其老人和兒童這部分群體仍大部分采用現金支付的方式。隨著我國鎮村公交不斷完善和老齡化的加劇,公交投幣機紙幣模塊的設計研究現階段仍具有現實意義。國內對紙幣的清分、找零技術研究較少,能運用于現實生產生活中的更是寥寥無幾。一些火車站、地鐵站出現的自助售票機引進了國外的紙幣接收處理模塊,我國不具有自主產權。由于使用環境不同,國外的紙幣接收處理技術也難以適用于公交投幣機[2]。
為改變這一現狀,結合公交投幣機實際使用環境,這里設計了一種新型紙幣處理模塊。該模塊不僅可以實現紙幣的自動清分存儲,而且具有快速循環找零功能。
2 紙幣處理方案與傳輸單元設計
2.1 快速找零方案設計
實際使用中,投幣機的找零時間不能過長,否則會影響后續乘客上車,進而增加公交停車等待時間。為提高找零速度,新型紙幣處理模塊采用紙幣進鈔系統與找零出鈔系統分開且同時工作模式。
該紙幣處理模塊由檢測單元、傳輸單元、清分存儲單元、找零單元和控制系統組成。紙幣處理系統的整體結構示意圖,如圖1所示。紙幣從進鈔口被投入,由傳送帶輸送到檢測單元。檢測單元檢測紙幣真偽。如檢測到紙幣為假幣,傳送帶倒轉,退出紙幣;檢測為真幣后,檢測系統再識別紙幣面值。面值識別結束,紙幣經傳送帶傳送進入傳輸單元。與此同時,控制系統計算找零錢數,確定找零方案,控制找零單元工作,使相應面值、數量的紙幣從出鈔口輸出,實現找零。

圖1 整體結構示意圖Fig.1 Schematic Diagram of the Overall Structure
乘客新投入的紙幣經傳送單元,由轉向傳送帶到達清分單元。如果檢測到找零單元中與新投入紙幣面值對應的找零紙幣存儲筒未滿,則由傳送帶將新投入的紙幣傳送進入找零單元,存入相應面值的存儲筒中。如果檢測到對應面值的找零存儲筒已滿,新投入紙幣則由轉向傳送帶傳送進入下方對應的存儲箱中。紙幣處理方案流程圖,如圖2所示。

圖2 紙幣處理方案流程圖Fig.2 Flow Chart of Banknote Processing Plan
2.2 傳輸單元設計
傳輸單元整體結構簡單,主要由多組傳送帶組成,起到對紙幣的傳輸作用。紙幣傳輸通常采用兩排滾輪與皮筋或扁平皮帶夾持紙幣的方式。這里通過比較皮筋和扁平皮帶這兩種傳輸方式的優缺點,最終選取多組平行扁平皮帶的傳輸方式。紙幣傳輸結構示意圖,如圖3所示。傳輸結構主要由2個驅動帶輪、2個從動帶輪及扁平皮帶組成。相較于皮筋,扁平皮帶寬大柔軟,摩擦力更大,不易發生卡幣和紙幣滑落的現象,傳輸更可靠。采用平行扁平皮帶的方式在傳輸過程中還起到對紙幣壓平整理的作用[2]。

圖3 紙幣傳輸結構示意圖Fig.3 Schematic Diagram of Banknote Transfer Structure
3 紙幣清分存儲單元設計
為解決公交公司依靠人工清點票款問題,降低人工成本,設計的紙幣模塊具有紙幣自動清分、計數存儲等功能。國內外對紙幣清分研究較多,方法也多種多樣。這里設計了一種可轉向的傳送帶,通過傳送帶旋轉改變方向,實現紙幣清分存儲工作。
3.1 清分存儲方案設計
清分存儲單元結構示意圖,如圖4所示,由四個轉向傳送帶和紙幣存儲箱組成,存儲箱分為4格,分別用于存放20元、10元、5元、1元紙幣。4個儲存箱格入口處分別安裝1個紅外傳感器用于感應計數。當乘客新投入的紙幣從傳輸單元輸出時,1號轉向傳送帶整體順時針旋轉90°至垂直狀態(圖4中2號轉向傳送帶所示位置狀態)接收紙幣。如果為20元紙幣,則直接輸送入下方儲存箱格中;如果為其他面值的紙幣,且檢測到找零單元對應儲存筒已滿,則1號轉向傳送帶逆時針旋轉90°呈水平狀態(圖4中所示的位置狀態),向2、3、4號轉向傳送帶傳送紙幣。轉向傳送帶通過旋轉改變狀態,垂直狀態時輸送紙幣進入對應的儲幣箱格中,平行狀態時輸送紙幣進入下一轉向傳送帶。2號、3號、4號轉向傳送帶分別對應控制10元、5元、1元紙幣。其中4號轉向傳送帶還起到將紙幣輸送到找零單元的作用。紙幣進入對應箱格時,紅外傳感器檢測到紙幣進入,控制器累加計數,從而實現票款的實時統計。

圖4 清分存儲單元結構示意圖Fig.4 Schematic Diagram of Clear Storage Unit Structure
3.2 轉向傳送帶結構設計
轉向傳送帶由1個舵機、2個步進電機、4個帶輪(2個驅動帶輪,2個隨動帶輪)、固定架和傳送帶組成。轉向傳送帶三維結構簡圖,如圖5所示。兩個步進電機分別驅動帶輪及傳送帶轉動,實現對紙幣的傳送。通過舵機旋轉固定角度來改變傳送帶方向位置狀態,以此來改變紙幣下一步被傳送位置。固定架起到電機與傳送帶輪部分的聯接固定作用。固定架有兩根長軸,用于帶輪的配合定位安裝。帶輪與傳送帶部分與前文論述的傳輸結構相似。轉向傳送帶在整個紙幣模塊中多處使用,比如找零單元和各單元之間的過渡部分。該裝置是這里設計的紙幣模塊中重要的部件。

圖5 轉向傳送帶三維結構簡圖Fig.5 Schematic Diagram of the Three-Dimensional Structure of the Steering Conveyor
4 循環找零單元設計
以往一些具備紙幣找零功能的設備通常是找零模塊與接收模塊相互獨立,采用預先填裝一定數量的找零備用紙幣的形式,因而流通效率較低。為提高小面額紙幣的流通效率,緩解零錢在投幣機中積壓問題。新設計的紙幣模塊具有紙幣循環找零功能。所謂循環找零,就是將乘客新投入的零錢紙幣重新補充到找零備用紙幣中用于再次找零。
4.1 循環找零方案設計
找零單元整體結構示意圖,如圖6所示。找零單元由找零機構及轉向傳送帶組成,三個機構分別負責1元、5元、10元這三種面值紙幣的找零。當控制系統確定找零方案后,找零模塊開始工作。相應面值的六邊形找零存儲筒逆時針旋轉相應角度,卷軸旋轉收集釋放出的多余卷膜。被釋放出紙幣,經輸送裝置、轉向輸送帶送達出鈔口,實現找零。
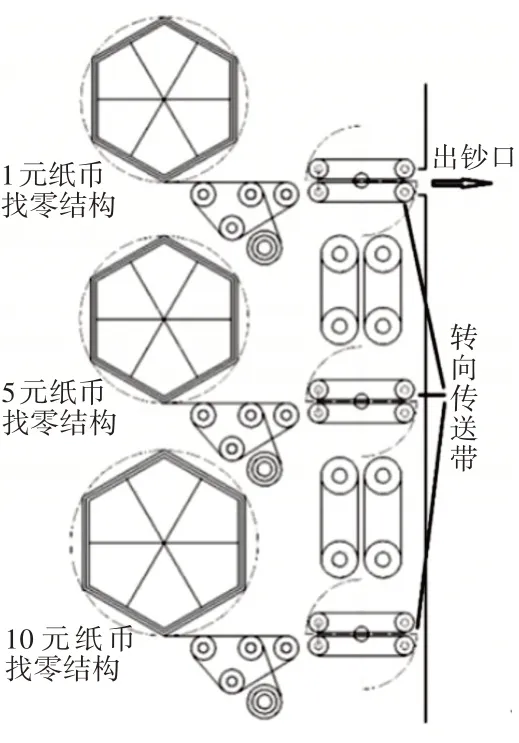
圖6 找零單元整體結構示意圖Fig.6 Schematic Diagram of the Overall Structure of the Change Unit
紙幣回存過程找零單元動作與找零過程相反。乘客新投入紙幣后,通過超聲波傳感器檢測存儲筒表面的卷膜厚度來判斷存儲筒是否已滿。當檢測對應面值的存儲筒未滿,新投入的紙幣經傳送單元和(1~4)號轉向傳送帶,4號轉向傳送帶逆時針旋轉90°,將紙幣輸送到找零單元,找零單元中相應面值的轉向傳送帶旋轉至水平狀態將紙幣輸送到六邊形存儲筒下方預定位置,隨著六邊形存儲筒順時針旋轉,卷軸釋放的卷膜夾著紙幣將其卷存入對應存儲筒,實現紙幣回存,以備下次找零使用。
4.2 找零裝置結構設計
取出具體數量紙幣的方式有多種,使用較多的是采用捻輪抽取或吸盤吸取的方式,但這兩種方式結構比較復雜,對紙幣質量要求也較高[3]。采用卷膜將紙幣卷存于滾筒表面的方式,降低了對紙幣質量的要求,存取一定張數的紙幣也相對容易實現。找零結構由六邊形存儲筒、卷膜、卷軸、換向輪和傳送裝置組成。找零機構三維結構簡圖,如圖7 所示。采用卷膜中間內嵌傳送帶方式,可以在節省空間的同時,保證紙幣能夠到達預定位置,從而避免紙幣在卷存于六邊形滾筒時因錯位而造成的紙幣折損。六邊形滾筒的設計,在滿足存儲最大數量和尺寸要求的同時,還起到對紙幣進行平整的作用[4]。卷軸由步進電機驅動,與六邊形找零存儲筒配合旋轉,進行卷膜地收集與釋放,保證卷膜始終處于繃直狀態。卷膜使用塑料薄膜材料制成,厚度小,強度高,壽命長,可以滿足對紙幣的夾持、裹挾需要。
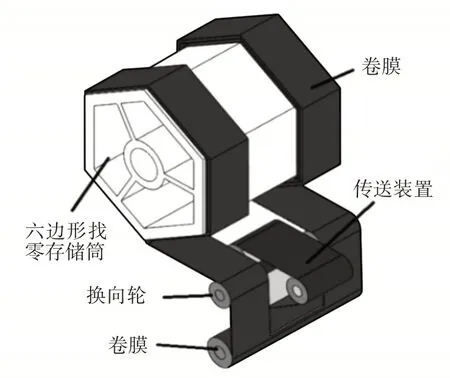
圖7 找零機構三維結構簡圖Fig.7 Schematic Diagram of the Three-Dimensional Structure of the Change Mechanism
該結構設計在實現紙幣找零方面相較于其他方式,具有結構簡單、技術要求低、可靠性高等特點。
5 控制系統與檢測單元設計
5.1 硬件部分
這里設計的紙幣處理模塊采用Arduino Mega 2560微型控制器作為樣機控制核心,結合電機驅動模塊、TCS34725顏色傳感器模塊、磁敏傳感器模塊、超聲波傳感器模塊和紅外計數傳感器模塊等組成整個控制系統。通過控制電機驅動模塊驅動步進電機轉動及其轉向,使找零存儲筒、傳送帶輪和卷軸旋轉工作。系統結構框圖,如圖8所示。
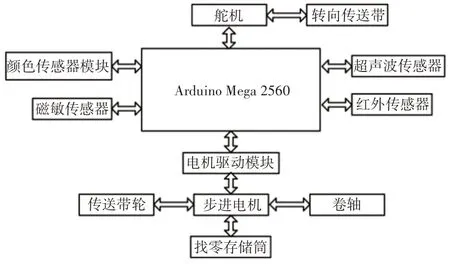
圖8 系統結構框圖Fig.8 System Block Diagram
5.1.1 Arduino控制器
Arduino Mega 2560 控制器的處理器核心是ATMega2560 芯片,如圖9所示。相較于其他型號的Arduino控制器,它提供了更多的I/O接口和更大的運算儲存空間。它具有54個數字I/O接口和16個模擬輸入口,完全可以滿足紙幣處理裝置的使用需求[5]。
圖9 Arduino Mega 2560Fig.9 Arduino Mega 2560
5.1.2 磁敏傳感器
我國的紙幣防偽技術和真偽識別技術不斷成熟。常用的紙幣真偽識別技術有紫外線識別技術、磁性識別技術、弱磁編碼識別技術、紅外線識別技術和激光識別技術等。這里采用隧道磁電阻(Tunnel Magneto Resistance,TMR)采集紙幣安全線及冠字碼的磁信號來進行紙幣真偽識別。TMR磁性識別傳感器是針對紙幣磁信號檢測與識別研發的新型純阻抗驗鈔磁頭,采用偏置磁鋼凹陷設計結構,具有高靈敏度與高信噪比的特點。TMR傳感器采集磁信號數據經小波降噪處理后,控制器分割提取中段有效信號,并提取有效信號波形的能量、均方差、峰值等特征。根據不同特征指標,分析磁信號分布規律,從而判斷紙幣的真偽[6-7]。
5.1.3 顏色傳感器
TCS34725 顏色傳感器,如圖10 所示。可以采集紅、綠、藍(RGB)以及明光感應的數字返回值。因為不同面值的紙幣存在明顯顏色差異,采用TCS34725顏色傳感器模塊采集紙幣的RGB數據值,使用ATMega2560芯片進行8G-4R-4B二值化RGB數值處理以及RGB 到HSV(Hue色調,Saturation 飽和度,Value 亮度)顏色空間的轉化。利用紙幣圖像H分量的前三階顏色矩作為分類特征,分析得到不同面值紙幣之間的數據特征區別,從而實現紙幣的面值識別[8-9]。
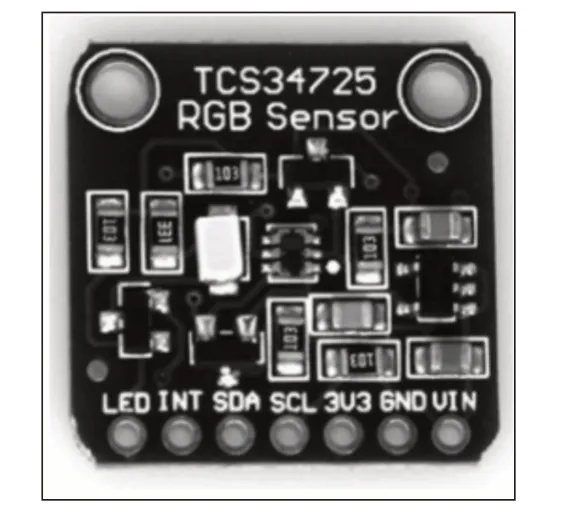
圖10 顏色傳感器Fig.10 Color Sensor
5.1.4 紅外傳感器
紅外傳感器,如圖11所示。該傳感器以對射感應方式,有常開與常閉兩種模式。常開時,有遮擋物時輸出5V電壓,無遮擋物時輸出0V電壓,常閉時則相反。利用這一特性,控制器通過接收紙幣瞬時通過傳感器產生的電壓脈沖實現計數功能。該傳感器的感應距離為(0~30)cm,響應時間為2ms,可以滿足實際感應計數需要。

圖11 紅外傳感器Fig.11 Infrared Sensor
5.2 軟件部分
系統利用Arduino IDE開發環境進行程序設計。該開發環境運用C語言進行編寫,主要參數功能已函數化、模塊化,模塊的功能實現較為方便。該裝置的程序系統主要由主程序、找零子程序、循環存儲子程序、傳感器檢測子程序以及電機調速控制子程序等組成。系統主程序流程圖,如圖12所示。

圖12 系統主程序流程圖Fig.12 System Main Program Flow Chart
找零算法程序流程圖,如圖13所示。通過對需要找零錢數進行整除和取余操作,結合對應面值剩余備用找零錢數,實現對找零方案的確定。該方案可滿足投入紙幣最高面值20元投入紙幣的找零工作。最終根據程序輸出值,控制相應六邊形存儲筒驅動步進電機旋轉一定角度,釋放出所需張數的相應面值紙幣。步進電機旋轉角度公式如下:

圖13 找零程序算法流程圖Fig.13 Flow Chart of the Change Program Algorithm
10元找零桶步進電機旋轉角度:

5元找零桶步進電機旋轉角度:

1元找零桶步進電機旋轉角度:

5.3 步進電機控制及模擬分析
通過脈沖寬度調制(Pulse Width Modulation,PWM)來控制步進電機旋轉一定角度,從而控制轉向傳送帶的預定旋轉角度。Arduino Mega 2560處理器有16個數字接口可作為PWM輸出,通過程序編寫,利用這些接口產生不同占空比的方波,模擬產生PWM信號進行實現舵機不同角度的控制。
步進電機控制框圖,如圖14所示。
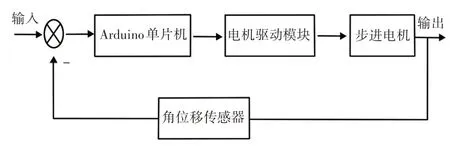
圖14 步進電機控制框圖Fig.14 Stepper Motor Control Block Diagram
Arduino單片機為比例環節G0=K0,電機驅動模塊與步進電機傳遞函數為:

角位移傳感器為比例環節G2=K1。則系統傳遞函數為:

式中:T=0.2,K0=427,K1=0.014。
根據系統框圖,利用MATLAB/SIMULINK 對系統進行動態仿真分析。系統階躍響應仿真曲線,如圖15所示。
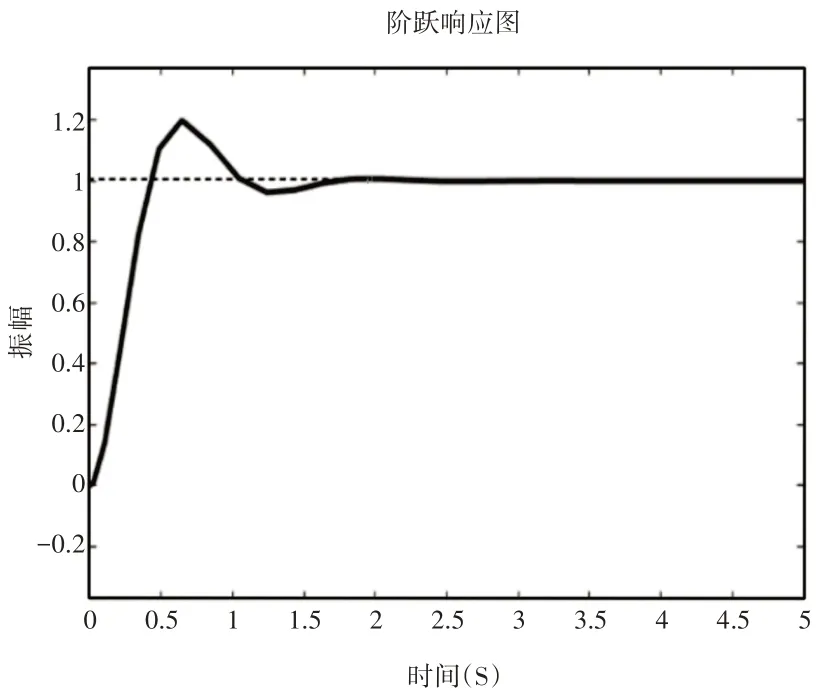
圖15 系統階躍響應仿真曲線Fig.15 System Step Response Simulation Curve
可以看出,其穩態誤差小于2%,超調量在18%左右,響應時間在1s左右,系統快速性、穩態性良好[10]。
6 結束語
這里設計的新型公交投幣機紙幣模塊,旨在解決目前公交投幣機功能單一,不能對紙幣進行自動清分和循環找零的問題。該紙幣模塊具有紙幣的識別清分、計數存儲及循環找零功能。
(1)紙幣自動清分方面,紙幣模塊能夠快速地實現20元、10元、5元、1元四種面值紙幣的識別清分、計數存儲功能。存儲箱可以存儲(800~1200)張紙幣,并方便取出和安裝。
(2)循環找零方面,該結構方案可實現10元、5元、1元三種面值紙幣的循環找零功能,并存取紙幣時降低了對紙幣質量的要求。
通過實驗機和軟件模擬驗證了該模塊方案的可行性和精巧性。在后續的研發中,可增加如:硬幣處理、網絡支付、顯示播報等功能,在可靠性、節能降耗等方面優化改進,使之應用于實際生活中。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
