基于GNS S 技術的露天邊坡變形自動監測系統
2022-07-20 01:17:06陳子江
經緯天地 2022年3期
陳子江
(貴州地礦基礎工程有限公司,貴州 貴陽 550081)
0.引言
隨著開采深度的增大,邊坡的陡峭程度也會隨之增大,逐漸增加了安全生產的難度,但要想提高礦產的經濟效益,就必須把坡角再加大一些,這就會導致安全生產和經濟效益產生嚴重沖突。因此,對露天礦邊坡進行持續的變形監測和預警具有十分重要的意義,而露天礦山的地表位移監測工作周期較長,同時礦山環境復雜受不確定因素影響,地表變形預測的準確度偏低。基于當前現狀,許多學者都研究了露天邊坡變形監測方法,其中,李耀楠[1]等研究了基于綜合分析法的露天礦邊坡穩定性分析方法,該方法預先進行實際調查,通過赤平投影法找到邊坡可能發生破壞的位置,運用極限平衡法計算,實現了邊坡變形監測;寧永香[2]等研究了礦山邊坡地表變形的PSO-ELM預測模型,該模型建立基于粒子群優化與極限學習機算法,計算影響因素與地表變形數值之間的耦合關系,并建立預測模型,實現變形自動監測。現有監測方法雖能夠實現露天邊坡變形監測,但是監測效果不是很好。
GNSS技術是一種全新的現代空間定位技術,該技術能夠實時提供觀測點的三維位置,受到天氣的影響較小,并且能夠全球、全天候、全天時地提供定位信息,定位精度較高。基于這個優點,GNSS技術在邊坡監測中應用越來越廣泛,為此設計一個基于GNSS技術的露天邊坡變形自動監測系統,以提高邊坡監測的效果,提高礦山開采的安全性。
1.基于GNSS 技術的露天邊坡變形自動監測系統框架
此次研究系統在設計前,對露天礦山邊坡監控的工程實踐進行了研究和分析,并對監測資料做了深入的探討。基于分析,確定所研究系統的基本功能:
(1)具備數據采集、顯示、查詢、平移、放大、縮小、打印輸出等基礎功能;
(2)能夠組織和管理多源數據,如,露天礦地形資料、露天礦邊坡面位移監測資料、地質資料、露天礦區域遙感資料、露天礦航空攝影影像資料等,并能夠建立數據庫、鏈接、復制等;
(3)繪制露天礦山邊坡坡體的變形趨勢[3];
(4)計算露天礦山邊坡的變形,預測邊坡位移,對邊坡風險分區分級。
2.露天邊坡變形自動監測系統硬件設計
系統的硬件平臺采用模塊化的設計思想,針對各模塊的功能要求和性能要求,重點設計導航接收模塊、ARM定位解算模塊、通信接口模塊、加速度傳感器模塊。
2.1 導航接收模塊
利用北斗星通公司三系統八頻高精度OEM芯片,BDM683為原始資料接收板,完成了對導航信息的解碼與處理,以滿足多模多頻導航接收模塊的需要。BDM683板具有384個信道,初始化時間不超過10秒,BDM683板卡主要性能指標如下:
(1) 定位精度:單點平面為1.5mRMS、單點高程為3.0mRMS;
(2)觀測精度(如表1所示):
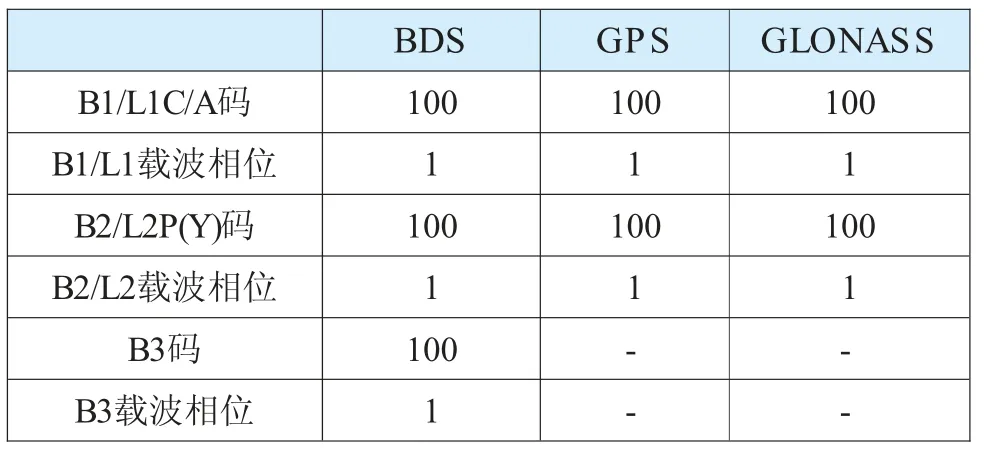
表1 BDM683觀測精度 單位:mm
本板是將接收器的前端硬件整合到大型電路中,通過TNC接口天線端GNSS RF信號輸入到BDM683的接收板上,經過變頻、放大、濾波等處理,實時解調,從而達到對GNSS信號捕獲、跟蹤、同步、解調的目的。
2.2 ARM定 位 解 算 模 塊 搖搖搖搖搖搖搖
定位解算模塊采用ARM結構,它是嵌入式系統的核心,也是計算控制的核心。 ARM位置和解算模塊通過對BDM683解調后的衛星信號實時分析,得到經緯度、速度、時間等數據,并將其存入主機。 該方案需要選用具有內存管理單元和操作系統的ARM處理器, 綜合考慮到GNSS系統的功能要求和性能要求, 選擇了TI公司的AM3358作為主要控制芯片。ARM處理器是運行操作系統,它包括電源電路、復位電路、時鐘電路。 AM3358是一款32位RISC的工業級處理器, 功耗較低。 AM3358具有高集成度的外設, 其性能得到了極大地提高,AM3358是Cortex-A8處理器中價格最低的一種,還可以大大減少電路的復雜程度和擴展成本。
2.3 加速度傳感器模塊
加速傳感器采用芬蘭VT1公司的SCA3060三軸加速傳感器,SCA3060采用VTI的3D-MEMS電容式傳感技術, 功耗小、負載大、穩定性好、外部電路簡單,便于集成,在慣性導航、車輛報警、傾角測量、運動檢測等領域得到了廣泛應用。
SCA3060具有以下優點:
( 1)3.3V至3.6V的高電壓電源;
( 2)16-SP1數字接口通訊;
( 3)功率較小,為3.3V;
( 4)提供150μA的電流;
( 5)具有動作探測功能,發送中斷信號;
( 6)符合AEC-Q100標準的規格要求,采用業界領先的經驗證的3D-MEMS技術。
2.4 無線通信模塊
無線通訊模塊是連接地面指揮中心和地面終端設備之間的一座橋梁,系統采用GPRS接口接入GPRS網絡,與監控中心進行數據通信,實現遠程監控和遠程控制。在此方案中,我們選擇了華為EM310系統,EM310是一個具有GSM/GPRS的雙頻網通訊系統,此模塊工作穩定,內置TVS管,可有效地避免卡紙的產生。 在此基礎上,將TCP/IP協議嵌入軟件中,通過出線指令的控制,實現了應用軟件的快速接入,從而降低了軟件的開發難度,縮短了軟件的開發周期。 EM310通信模塊的主要性能指標( 如表2所示):

表2 EM310通信模塊的主要性能指標
通過表2提到的無線通信模塊, 為系統提供遠程通訊功能。
3.自動監測系統關鍵技術原理
為提高自動化監測系統數據分析的準確性,在提高硬件設備的基礎上,還需要融合先進的算法技術,在理論基礎上實現提升。首先基于GNSS的邊坡監測技術,受GNSS自身技術原理限制,數據存在一定的噪聲,在自動化監測系統設計中,需增加濾波處理過程; 其次結合GNSS數據采取模糊物元理論對邊坡的形變情況、類型進行劃分,以實現對邊坡穩定等級的判定。
3.1 數據噪聲去除
針對露天邊坡變形情況, 充分考慮到GNSS容易受到地面、建筑物、樹木等因素的影響,在這種情況下會導致GNSSRTK高程測量的精度檢測,出現一定的誤差。 在誤差處理中,采用卡爾曼濾波方程對數據降噪處理。卡爾曼濾波包括反映狀態變化規律的狀態空間模型和反映實際觀測值和狀態變化量的觀測模型,通過卡爾曼濾波聯系觀測值和狀態變化規律可得到最佳估值。 卡爾曼濾波是通過歷史累計值、實際觀測值推算而得到最佳估值。
3.2 邊坡變形情況分析
露天邊坡變形情況是一個較為復雜的系統,其形成機理具有多樣性、模糊性以及非線性。經過綜合分析,采用模糊物元理論進行監測,將事物名稱記作N,將特征c的量值記作v,如式( 1)所示:
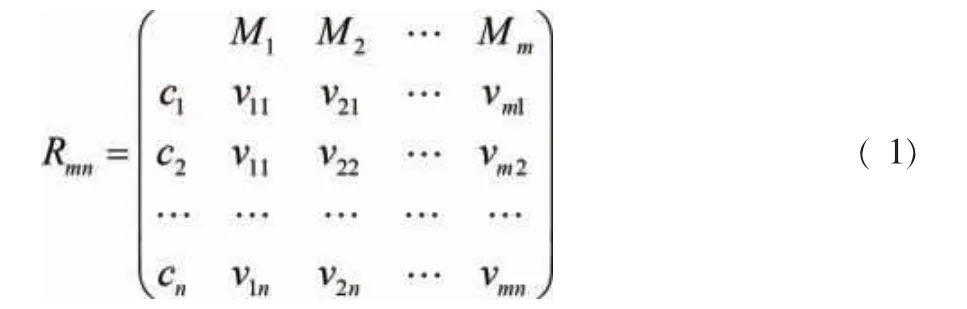
式( 1)中,M為事物的數量。
在監測過程中,各個特征的模糊量值相差較大,會給計算結果造成較大的困難, 為此優隸屬度原則進行標準化處理,如式( 2)所示:
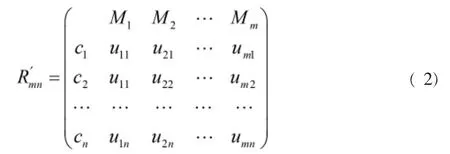
式( 2)中,umn為第mn個標準化后的模擬值;R′mn為標準化處理后的模糊物元。
在得到各個參數平方模糊物元之后,需要評價原則評價事物狀態的優劣,如式( 3)所示:

式(3)中,wi為權重;Δji為衡量評價指標重要程度的參數。
經過上述過程, 得到各個因素相對重要性總的排序,對判據定量分析。 經過上述處理后,采用GNSS技術進行定位,如式( 4)所示:

式( 4)中,Izi、Ii分別為延遲參數;Ebi、Eir分別為傳輸過來的差分數據與發送的差分數據;fl為接收機誤差參數。
經過上述過程實現定位,然后對穩定等級判定,將情況分為穩定、較穩定、較不穩定區、不穩定四個等級,以此完成露天邊坡變形監測。
4.實驗對比
為驗證所提出的基于GNSS技術的露天邊坡變形自動監測系統的有效性,進行實驗分析,并將基于綜合分析法的監測方法、PSO-ELM預測模型與所提出的監測系統對比,對比3個系統監測的準確性。
4.1 實驗準備
監測對象(如圖1所示):

圖1 監測對象點
監測點深度以及埋設間距統計表( 如表3所示):
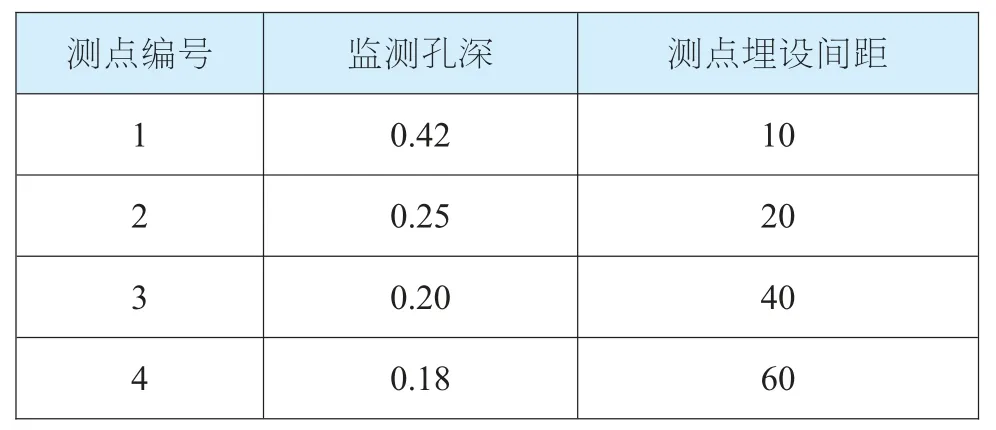
表3 各個監測點深度以及埋設間距統計 單位:m
( 1)觀測前,預先采用GNSS獲得實際的位移值,GNSS接收機在開始觀測之前,需檢驗儀器是否能夠穩定運行;
( 2)為提高觀測的穩定性,將一個大時段分為2個小時段的模式, 并在中間重新啟動一次儀器, 保證每次觀測達到60min以上;
( 3)長期監測可以得到相當數量的原始監測資料,但并非所有資料都能用于邊坡的預報, 某些資料存在一定的誤差,必須予以剔除本文利用Matlab小波分析法對原始觀測進行降噪處理;
( 4)由于樣本的輸入數據單位與量綱不同,而且某些輸入量的絕對差異較大,因此很容易產生“ 過擬合”。 為了防止這一情況,在進行網絡訓練前,先將采樣數據進行標準化,使得它們的數值都在[-1,1]以內。 標準化如式( 5)所示:

式( 5)中,x為原始的樣本數據;xmin、xmax分別為樣本中各個輸入對應的最大和最小值。
( 5)經過多次測量,獲得實際的監測數據。
4.2 監測結果分析
為驗證本方法的可行性與準確性,將本方法與基于綜合分析法的預測模型、PSO-ELM預測模型進行對比實驗。
基于綜合分析法的預測模型是在傳統灰色模型融合BP神經網絡模型上進行數據分析的預測模型[4]。
PSO-ELM預測模[5]是在傳統極限學習機( ELM,Extreme Learing Machine)模型基礎上融合了粒子群優化( PSO,Particle Swarm Optimization), 實現了對ELM模型的權重和閾值等參數的優化,被廣泛應用在邊坡變形預測中。
分別采用所研究的監測系統與上述兩個預測模型對露天邊坡變形監測,監測時長為一個月,各個監測點的結果( 如圖2- 圖5所示):
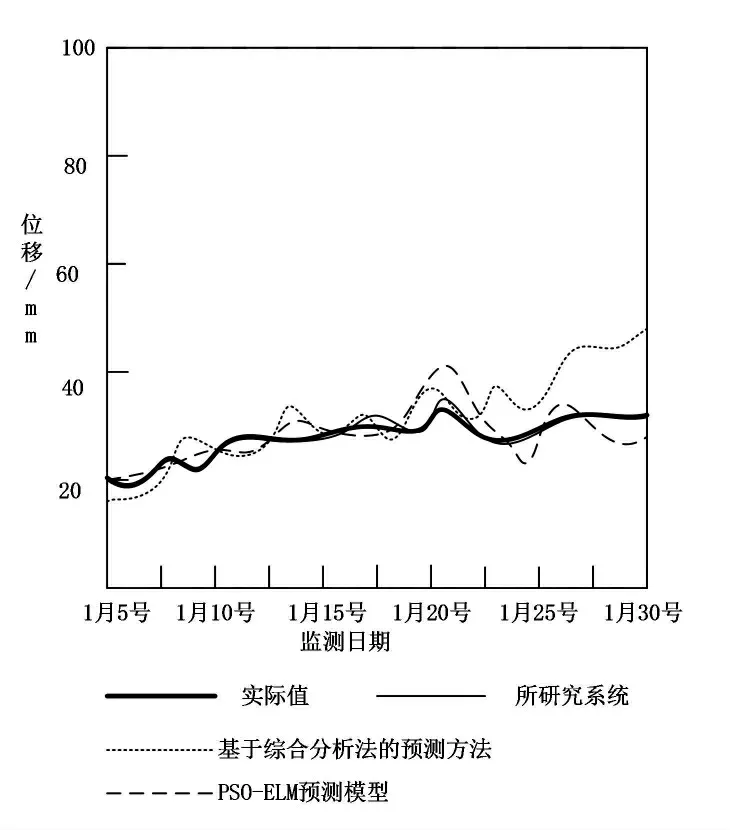
圖2 測點1位移結果
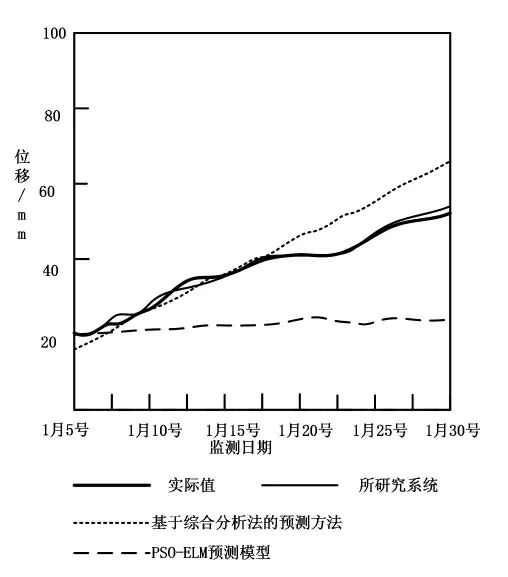
圖3 測點2位移結果
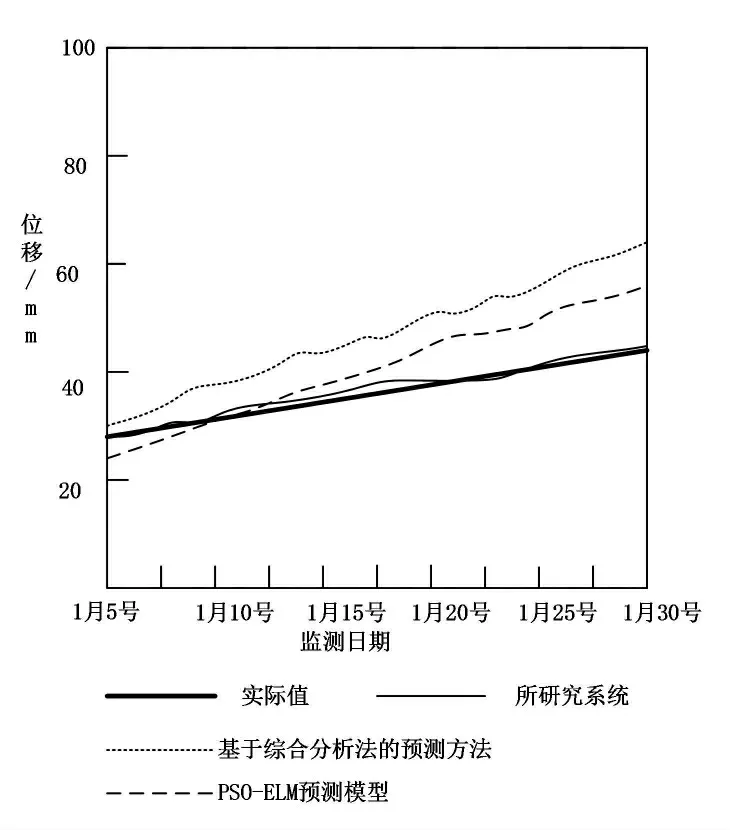
圖4 測點3位移結果
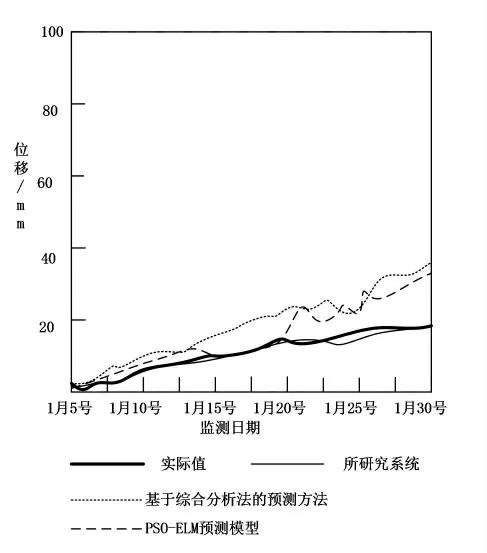
圖5 測點4位移結果
綜合上述對比結果能夠發現,所提出的露天邊坡變形監測系統在這一個月的監測上,監測得到的結果與實際的位移值基本相同,相差較小。 基于綜合分析法的預測方法與實際位移值相差較大,或多或少與實際值有一定差距,監測準確性不是很高;PSO-ELM預測模型得到的位移結果與實際結果差距也較大,較所提出的監測系統監測準確性低。
5.結束語
完成基于GNSS技術的露天邊坡變形自動監測系統的研究,主要研究成果包含以下方面:
( 1)詳細設計了系統硬件,保證系統安全穩定運行;
( 2)在系統軟件部分,設計了變形監測數據處理方法,構建了預測模型,對于邊坡變形監測有一定的指導意義;
( 3)設計實驗,通過實驗驗證了所提出的監測系統在實際應用中,準確度較高。
本文所提出的監測系統雖然獲得了較好的應用效果,但研究時間與研究條件有限,并未對以“ 年”為時間單位的觀測數據進行長期實驗分析,后續考慮將此方法用于不同地質類型的邊坡監測工程中,并進行長期實驗分析。 影響變形監測的因素有很多,為此在后續研究中,還需要重點研究影響因素,以進一步提高監測的效果。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
中華詩詞(2020年1期)2020-09-21 09:24:52
數學物理學報(2020年2期)2020-06-02 11:29:24
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
家庭影院技術(2017年9期)2017-09-26 03:41:45
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
