對機載LiDAR原始點云進行質檢的方法研究
2022-07-20 01:16:40侯國瑞
經緯天地 2022年3期
侯國瑞
(亞太遙感(山西)科技有限公司,山西 太原 030006)
0.引言
機載LiDAR是激光探測及測距系統的簡稱。它集成了激光掃描儀、IMU、GPS和數碼相機等光譜成像設備[2]。激光雷達技術發展較為迅速,尤其是需要大面積作業的新疆、植被比較茂密的諸多南方城市以及國家電網等更新周期較短的大型項目等,LiDAR作為獲取地面三維數據的工具已經得到廣泛地認同。機載LiDAR采集的原始點云數據具有分架次、呈條帶狀組織、信息豐富等特點[4],因此數據量是比較龐大的,需現場第一時間對原始點云數據進行解算,隨后進行質量檢查。如果發現異常,則需重新解算或者補飛,以免后期出現設備離場后需再返場的局面。激光點云質量元素包括點云質量、IMU/GNSS質量、飛行質量以及附件質量,本文主要基于煤航航飛質檢軟件就點云質量以及部分飛行質量做簡單描述。點云質量檢查的具體內容包括點云屬性、點云密度、點云噪聲、條帶相對高程差、點云精度(包括點云的平面精度和高程精度)。部分飛行質量包括飛行速度、航帶重疊度、覆蓋完整性、航跡、航高保持、飛行姿態等。
1.檢查依據
以廣東某激光數據為例,數據檢查依據為:《機載激光雷達數據獲取技術規范》CH/T 8024-2011、《機載激光雷達數據處理技術規范》CH/T 8023-2011、《IMU/GPS輔助航空攝影技術規范》GB/T 27919-2011[1]等行業規范以及項目設計書。
2.檢查指標
(1)密度:點云密度不少于2.73點/平方米,計算密度時以末次回波(含單次回波)為準。
(2)重疊度:平均航線旁向重疊達到20%,最小優于13%;丘陵、山地及建筑物密集地區,適當加密航線。如此可保證無數據漏洞,同時點云密度也可得到保證。
(3)邊界及接邊:旁向、航向覆蓋要求超出省界不少于500米;旁向、航向覆蓋要求超出非省界不少于250米。
(4)構架航線:每個分區布設2條構架航線;航高與分區航高基本保持一致。
3.點云精度
點云數據高程中誤差和平面中誤差(如表1所示)規定:
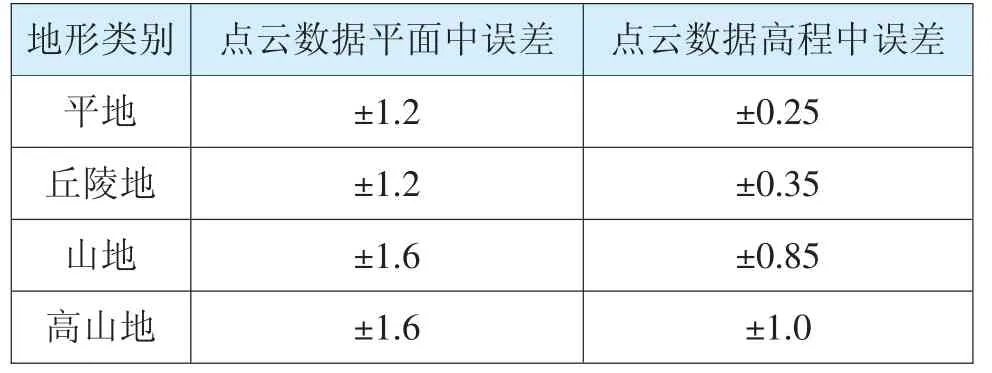
表1 點云數據精度要求 單位:米
4.數據檢查方法
利用煤航機載LiDAR航飛質量檢查軟件LiDAR-DC以及Terrasolid對激光數據的點云密度、點云噪聲、航線重疊度、航線彎曲度、單航線高差、飛行姿態、航線間高差等進行檢查計算,輸出最終檢查報告。
5.點云質量
5.1 點云屬性完整性
點云的屬性信息除了平面坐標和高程以外,原始解算得到的點云信息還包括GPS時間、回波、反射強度、掃描角度、航帶、顏色、原始類別、分組等[4],后期檢查分析這些信息是否存在信息缺失、異常等現象。此次項目數據后期檢查發現部分夜航激光點云缺失強度信息,后經多次重新解算才得以解決,導致后期激光點云處理工作返工。因此時刻總結經驗教訓是我們工作重要的一部分。檢查點云數據回波信息是否正常,比如房屋邊沿處應有首次回波、中間回波、末次回波,平地無植被覆蓋處回波類型應為唯一回波。檢查激光點云的掃描方向是否矛盾,掃描角度是否正常,邏輯是否合理[4],如發現有點云信息錯誤或者丟失的問題,應分析其原因,并提出解決方案。
5.2 點云噪聲%%
噪聲點是明顯遠離地面的離散點或點群,或高于地面,或低于地面,但實際工作中經常也會遇到從上到下穿插地面的密集噪點,這些點對后期處理會產生一定影響,應當剔除。
根據噪聲點的特殊性,使用Terrasolid軟件自動分類功能,設置參數,探測地面等可剔除大部分噪聲點。然后通過人機交互處理的方式再將剩余噪聲點剔除。在考慮地形的前提下利用質檢軟件將明顯異常的點云進行統計,確定是否滿足要求。
一般情況,由于系統原因產生的噪聲,都比較容易辨別,因為噪聲點明顯脫離地面點群,比較離散,數量也較少,都是零星的幾個或者幾十個,離散的正常噪聲點(如圖1所示)。根據實際工作中水域部分比較容易有噪點,高于或低于水面,數量或多或少,但一般情況這類噪聲點占比較少,去噪后,不會影響點云整體的密度,也不會對地形、地物等造成缺失,可以理解為正常噪聲[4]。但實際工作中經常會遇到非正常噪聲,此項目中在后期內業數據處理刪除水面密集噪點后,出現了水域岸邊點云有漏洞的情況,導致返場補飛。由于云、霧、煙遮擋等原因產生的噪點則比較集中、密集,去噪后會產生數據漏洞,需要根據漏洞大小進行補飛或采取其他措施。對于這種情況產生的點云漏洞,外業人員其實相當有經驗,現場會安排補飛。

圖1 離散的正常噪聲點
5.3 點云密度
檢驗方法:設置軟件參數,統計航帶覆蓋面積和本區域范圍內激光點數,通過點云密度=激光點數/覆蓋面積計算輸出航帶點云密度。構架航線獨立檢測。LiDAR-DC支持全自動點云密度檢查,按照密度進行點云渲染,并根據給定閾值2.73,對密度不合格區域生成矢量線進行標示。(如圖2所示),紅色值表示小于給定閾值,綠色值表示高于或滿足給定閾值。
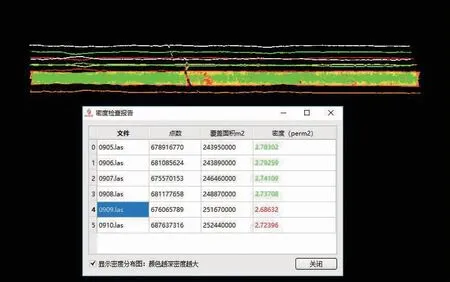
圖2 激光點云密度檢查報告
當點云密度不符合要求時,可利用點云與影像套合,分析原因:屬于瀝青路面、煤堆、水域等地物反射率較低引起的,則認為點云合理缺失;由于云煙遮擋,地形起伏,設備故障等引起的點云大量缺失,須補飛或重飛,成果判定為不合格。該軟件提供了人機交互功能輔助交互式手工檢查,可單獨測量出除去水域等合理缺失部分區域的激光點密度,使檢查結果更為精確。由于水域原因引起的密度不符合要求,可以計算得出去除水域部分的激光點密度(如圖3所示)。經軟件檢測此條帶激光點云整體密度小于2.73,但除去水域部分點云后,多邊形內的激光點云計算得到的密度為2.84。此密度值大于2.73,則認為其點云密度也是滿足要求的。
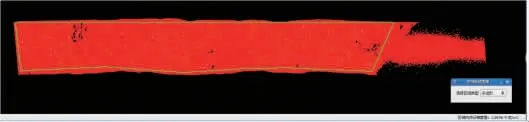
圖3 %手動去除水域部分的激光點密度
5.4 條帶間相對高程差%
條帶間相對高程差檢查是對兩條航帶間的點云高程精度進行自動檢查。系統對重疊條帶自動提取同名特征點,并對其相對高程進行計算分析。高程中誤差應小于項目激光點云高程精度要求。高程差檢查報告(如表2所示),同樣,輸出報告中綠色表示滿足給定的閾值要求,紅色的表示不滿足要求,針對不滿足精度要求的激光點在激光點軟件中讀入激光點,逐一檢核點云剖面圖,并改正。經檢查,如果兩次飛行時間間隔較長,比如數月甚至跨年,繼而出現的建筑新建或拆除,植被生長或凋零等引起的超過設定閾值,則為正常范疇。此項目出現較多這種情況。
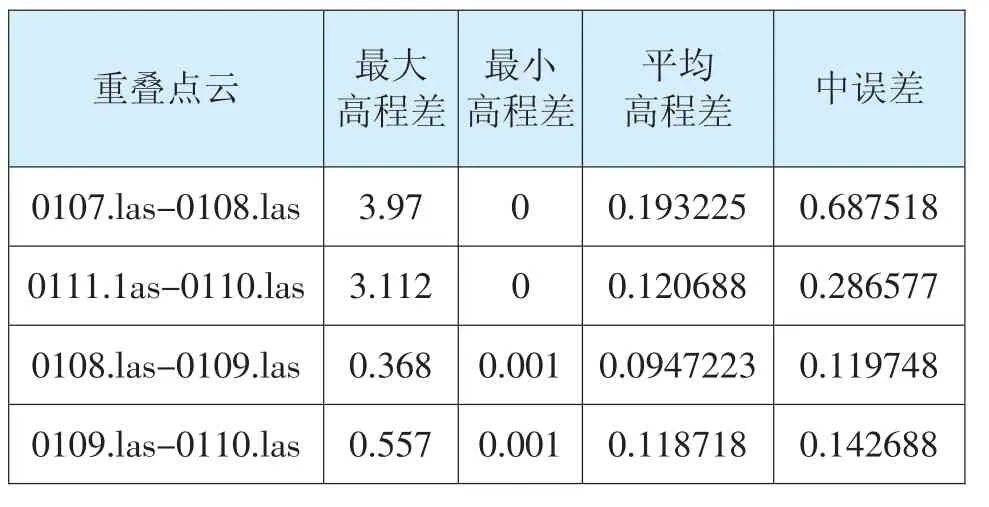
表2 航帶間高程差檢查報告 單位:米
5.5 航帶拼接相對平面中誤差
檢查方法主要為人機交互檢查,利用Terrasolid軟件,讀取相鄰航帶(此項目也包括同航帶的兩個掃描激光頭)間的重疊區域有規則地物部分的激光點云,設置為不同顏色,分析剖面,量取平面偏移是否小于平均點云間距(選擇有影像、易辨別地物為同名點,如,人字形屋頂邊界),平面位置中誤差應小于平均點云間距。此次質檢平面最大限差為1.2米。
5.6 點云的絕對精度
點云絕對精度(預處理后點云數據的平面、高程精度)的檢測方法:首先確定外業檢測樣本量,以25平方公里作為一個塊圖單位,計算每次提交成果折合塊圖單位總批量,然后按《測繪成果質量檢查與驗收》GB/T24356-2009確定樣本量。此項目覆蓋測區,均勻選取5公里×5公里驗證區30個。其次,內業人員在測區內均勻選取比較適合外業測取的平面、高程精度驗證點的概略位置,盡量選取交通便捷的位置,使外業測取人員能安全方便抵達,平面驗證點一般選取道路交叉口、水泥坎角、低矮房屋的房角等;實際采點中盡量選擇看上去近期不會拆除、翻新等的房屋,避免出現所采點的位置在激光點上找不到(浪費采點)的情況,高程精度驗證點宜選在平坦硬化的路面或水泥地面上。外業測量人員根據內業人員提供的概略位置進行實地測點,并提供給內業質檢人員實測點坐標成果以及每個點對應的位置照片成果。最后,由內業質檢人員根據實測點檢測激光點云的絕對精度。
平面精度的檢驗方法:利用Terrasolid軟件,讀取外業采集的平面驗證區的點(一般為低矮房屋等房角點),與對應位置的激光點一一驗證,不滿足精度要求的位置需核實原因,其原因通常有以下兩種情況:GPS信號問題引起的外業測點位置異常、激光點本身的問題。
高程精度的檢驗方法:在攝區內選擇攝區四周、四角邊緣處、航線首末端、攝區內部平坦區域、航帶間重疊區域、構架航線與飛行航線交叉處均勻布設檢測點(每個樣本約30個),統計點云高程精度。運用Terra輸出激光點云與野外實測離散高程點點位高差統計報告。輸出的高程精度報告(如圖4所示):
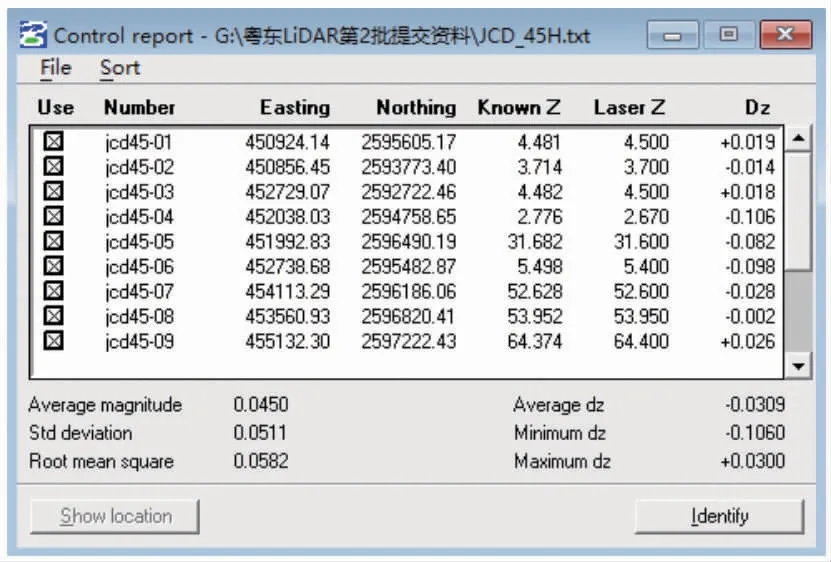
圖4 高程精度報告
6.飛行質量
對照航攝合同和航攝規范,核查設計數據精度指標選取的符合性、地面分辨率選擇的正確性、點云密度設計的符合性、航攝分區劃分的正確性以及飛行速度、航高、激光使用頻率、掃描頻率、使用視場角、地面基站、航線敷設、航攝時間、航攝設備、IMU/GPS處理軟件的合理性[4]。
6.1 覆蓋完整性
將抽稀讀取的點云數據對照攝區、分區邊線,檢查邊界覆蓋情況即可。不滿足要求則采取相應的補飛等措施。此項目經檢查覆蓋完整性均滿足要求。
6.2 飛行姿態、航高保持、飛行速度
%IMU/GNSS質量:偏心分量準確性、完整性,機載、地面GNSS數據記錄完整性,IMU數據記錄完整性,IMU/GNSS融合數據解算精度的符合性。
利用IMU/GPS解算數據檢查旋偏角、俯仰角、側滾角、飛機轉彎坡度的符合性,一般要求:旋偏角、俯仰角、側滾角不大于2度,最大不超過4度;飛機轉彎坡度不大于15度,最大不超過22度。飛行作業過程中,要求在一條航線內實際航高變化不超過設計航高的5%-10%,不超過相對航高的5%-10%。LiDAR-DC軟件檢測出的飛行姿態檢查報告(如表3所示),檢測出的航高檢查報告(如表4所示):

表3 飛行姿態檢查報告 單位:度

表4 航高檢查報告 單位:米
比較機載GNSS記錄的飛行地速與設計飛行地速是否符合《機載LiDAR數據獲取技術規范》CH/T 8024-2011的要求(飛行速度應盡可能保持一致;在一條航線內,飛機上升、下降速率不大于10米/秒)。
6.3 航帶重疊度
煤航軟件通過提取航帶邊緣激光點,形成航帶邊界范圍,按一定的采樣間距,可對航帶間有重疊部分的重疊度進行統計并輸出報告,輸出的報告(如圖5所示),其中紅色部分為不滿足給定閾值的部分,可以在Terrasolid軟件讀入激光點,進一步檢核不滿足給定閾值的部分是否為水域部分或其他原因,可為航線設計與激光漏洞補飛提供有力參考。
7.附件質量
檢查技術文檔的齊全性、完整性。檢查航攝儀、激光掃描儀、相機設備、地面基站接收機、機載GNSS接收機、IMU設備檢定報告的完整性、符合性。檢查資料的整飾質量。核查各類附圖、附表的完整性、符合性。
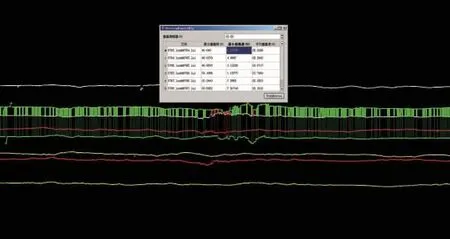
圖5 航帶重疊度報告
8.結束語
本文結合機載LiDAR生產作業實踐經驗,簡單介紹了基于煤航質檢軟件LiDAR-DC并結合MicroStation V8對點云密度、點云噪聲、航帶拼接誤差、預處理后點云數據的平面和高程的相對以及絕對精度、飛行速度、航帶重疊度、覆蓋完整性、航跡、航高保持、飛行姿態等進行質量檢驗的方法,并根據質量評定標準提出對應問題的解決方案。最后也希望能為行業人員在激光點云質量檢驗方法的探索研究道路上提供參考。
