道路全息測繪智能化提取方法研究
2022-07-20 01:16:14韋通
經緯天地 2022年3期
韋 通
(山東省國土測繪院,山東 濟南 250014)
0.引言
2017年11月,原國家測繪地理信息局批復上海市新型基礎測繪試點項目,道路全息測繪應運而生[1]。相較于傳統的數字測圖技術,道路全息測繪通過全景相機、激光雷達等先進感知設備,結合組合導航定位技術,使外業采集數據更加便捷、數據成果內容更加豐富,為城市的數字化建設提供了重要保障[2]。但是,這種高效、快速的數據采集手段給后續內業制圖帶來了新的問題:(1)數據種類多,點云、全景影像等多種數據在成果制作中難以有效融合、利用;(2)數據量大,不僅增加了內業人員數據處理環節,也增加了內業人員的辨識難度;(3)內業采集要素、屬性多,極大地增加了內業編輯人員的工作量、作業難度。
為此,基于點云數據的智能化提取成為當下道路全息測繪研究的熱點之一,國內外眾多學者對此進行了大量研究。馬新江等人針對車載激光點云中道路邊界提取不精確、復雜度高等問題,提出了一種基于路緣特征的城市道路邊界自動提取方法,通過實驗證明了該方法的可行性和有效性[3]。對于道路標識線等地物要素,范雯等人提出了一種基于空譜特征的車載LiDAR點云道路標識線提取方法,該方法充分考慮了車載激光點云中道路標識線的顏色、空間鄰域和高程等信息,依次對點云數據進行自動分類,提取道路標識線[4]。針對城市道路中的桿狀地物,李永強等人先通過改進形態學算法一處點云數據中的地面點,并通過統計分析移除噪聲點,再根據預先建立的桿狀地物樣本訓練SVM分類模型,對桿狀地物進行自動化提取[5]。此外,國內眾多機構也進行了深入研究、探索,研制了相應的道路全息測繪制圖軟件,如清華三維的EPS、上海測繪院基于Cloud compare軟件的智能提取模塊。
但上述研究仍然存在著一些問題,如,算法性研究實例數據驗證較少,很難快速投入實際生產;各個機構開發的半自動軟件模塊,無法融合全景照片、傳統地形數據,以及自動化提取的效果嚴重依賴于點云的質量。本文將利用TOPODOT對道路點云進行智能化提取,重點針對多源數據融合、地物要素自動化提取、屬性編輯等方面進行研究,并通過具體的工程實例,驗證本文方法的可行性、適用性。
1.全要素地形繪制
道路全息測繪,首先利用車載掃描系統進行外業數據采集,獲取的數據包括點云、全景照片、移動端GNSS/IMU數據和基站GNSS數據;數據采集完成后,使用Inertial Explorer(簡稱IE)對基站GNSS數據、移動端GNSS/IMU數據進行定位測姿數據的融合解算,得到車載掃描系統的行車軌跡信息(POS軌跡數據),并利用POS軌跡數據解算相應的點云數據;通常初步解算的點云數據無法滿足全息測繪的精度要求,需要進行點云糾正,以此修正POS軌跡數據;最后根據修正后的POS軌跡數據重新解算點云,并整理全景照片。
1.1 圖形信息提取
全要素地形數據制作主要根據合格的點云、全景照片等數據,在內業軟件平臺中對地物要素進行提取,地物要素按照類型可分為點要素、線要素和面要素,地物要素的提取順序可按“線要素—點要素—面要素”進行提取。線要素主要包括范圍分界線、道路邊線、道路標志線、通信線、分隔欄等線狀地物;點要素主要包括行道樹、桿狀物、各類管道設施、垃圾箱、交通標志等點狀地物;面要素主要包括填充面、網狀線、停車位、候車棚等面狀地物。
1.2 屬性信息編輯
根據道路全息測繪“應采盡采”的準則,全要素地形成果不僅包含各類地物要素的圖形信息,還涵蓋各類地物要素的社會、經濟屬性。通常,桿狀地物需要錄入其高度、編號等信息;交通標志牌需要錄入其內容、數值等信息;候車棚需要錄入其車次、站名等信息。
2.工程實例
2.1 工程數據
本文以徠卡Pegasus Two Ultimate移動激光掃描系統獲取的廣州某區域一段335m的單車道路數據作為實驗數據(如圖1所示)。道路數據包括點云數據和全景照片數據,其中,點云數據共18117727個數據點,涵蓋道路標志、道路標線、人行橫道線、道路邊線、公路護欄、路燈、指示牌、行道樹和一般公路橋等多類型地物要素;全景照片數據共92張,與點云數據空間位置相對應。
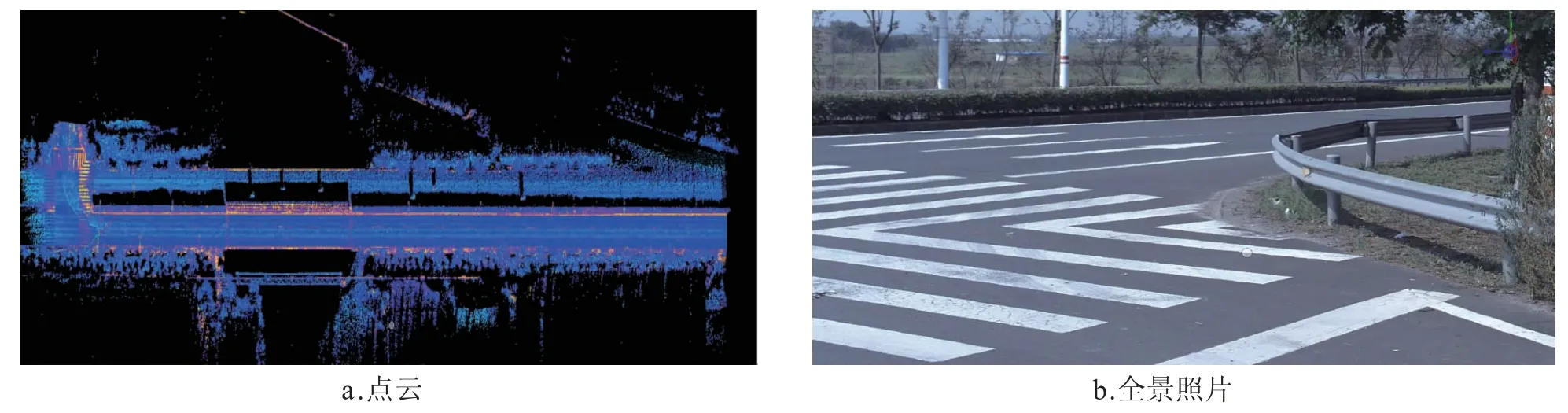
圖1 實驗數據
2.2 智能化提取
該段道路中涉及的地物要素,按類型可分為點要素、線要素、面要素,其中,點要素包括路燈、指示牌、行道樹等地物要素;線要素包括道路標線、道路邊線、公路護欄、人行橫道線等地物要素;面要素包括一般公路橋、路面標志等地物要素。
TOPODOT智能提取流程:
(1)對上述點云數據,通過調節點云的反射強度信息,使地物要素的邊界輪廓更加分明;
(2)根據入庫標準,在軟件波處理,得到每一列位平臺中定義地物要素圖層、地物要素屬性列表、地物要素圖形符號和智能提取模板,生成地物圖層的*.csv文件、地物要素圖形符號和智能提取模板的*.cell文件,以及地物屬性列表的*.xml文件,便于相同項目直接使用;
(3)利用TOPODOT的智能提取功能對地物要素進行矢量提取,提取結果(如圖2所示):

圖2 矢量圖形提取結果
從圖2可以發現:TOPODOT很好實現了實驗數據的特征點云分離,為后續智能化提取的準確性提供了先決條件;利用TOPODOT中智能提取功能,結合自定義的智能提取模板,對斑馬線、桿狀物、路面標線、道路邊線等地物實現了準確提取,且矢量數據與路面起伏情況完全貼合。
2.3 屬性編輯
在TOPODOT平臺中,可以在繪制矢量圖形時,使用自定義的地物屬性列表為各個地物附著屬性信息;也可在全部矢量圖形完成后,利用自定義的地物屬性列表按要素編碼類別統一附著屬性信息,結果(如圖3所示):
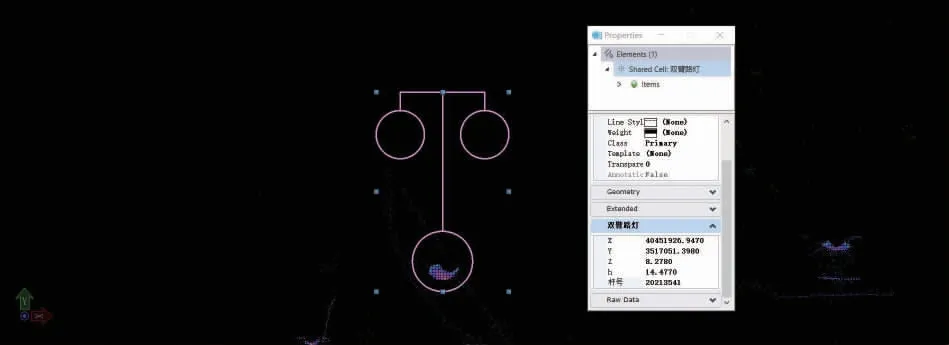
圖3 地物要素屬性成果
從圖3可以看到:雙臂路燈的屬性信息不僅包括其空間位置信息,還包括燈桿高度信息、桿號信息;對于路燈的空間位置信息、燈桿高度信息等數值信息,可以根據點云數據自動識別,錄入至屬性表相應位置;對于路燈的桿號等字符信息,需要根據外業綜合調繪結果,手動錄入。
3.成果精度分析
為了對TOPODOT軟件智能提取功能進行全面評估,利用網絡RTK技術、全站儀技術在實驗路段采集檢查點,檢查點均勻分布于路面標線、人行橫道線、一般公路橋、交通標志、雙臂路燈等地物要素,檢查結果(如表1所示):
從表1可以看出:該實驗道路中線要素、面要素、點要素的點位精度都優于0.05m,滿足道路全息測繪的精度需求;線要素中路面標線、人行橫道線的點位誤差為0.03m,說明了TOPODOT在路面標線智能提取的準確性;一般公路橋的點位平面點位誤差不大于0.02m,而點位高程誤差在0.03至0.05m范圍內,可能是因為高架橋的震動導致RTK測高不穩定;點要素中交通標志的點位誤差較差,是因為空中標志的點云密度較低,TOPODOT提取效果不佳,雙臂路燈點位平面誤差較大,而點位高程誤差較低,可能是因為利用全站儀對雙臂路燈進行偏心測量時,觀測誤差較大。因此,對于道路全息測繪,TOPODOT智能提取在提取精度上可以滿足項目需求;在工作效率方面,若不考慮圖層定義、圖形符號制作、智能提取模板制作和屬性列表定義等前期內容,TOPODOT可以實現人機交互式提取,極大降低了矢量圖制作所需人力、時間。
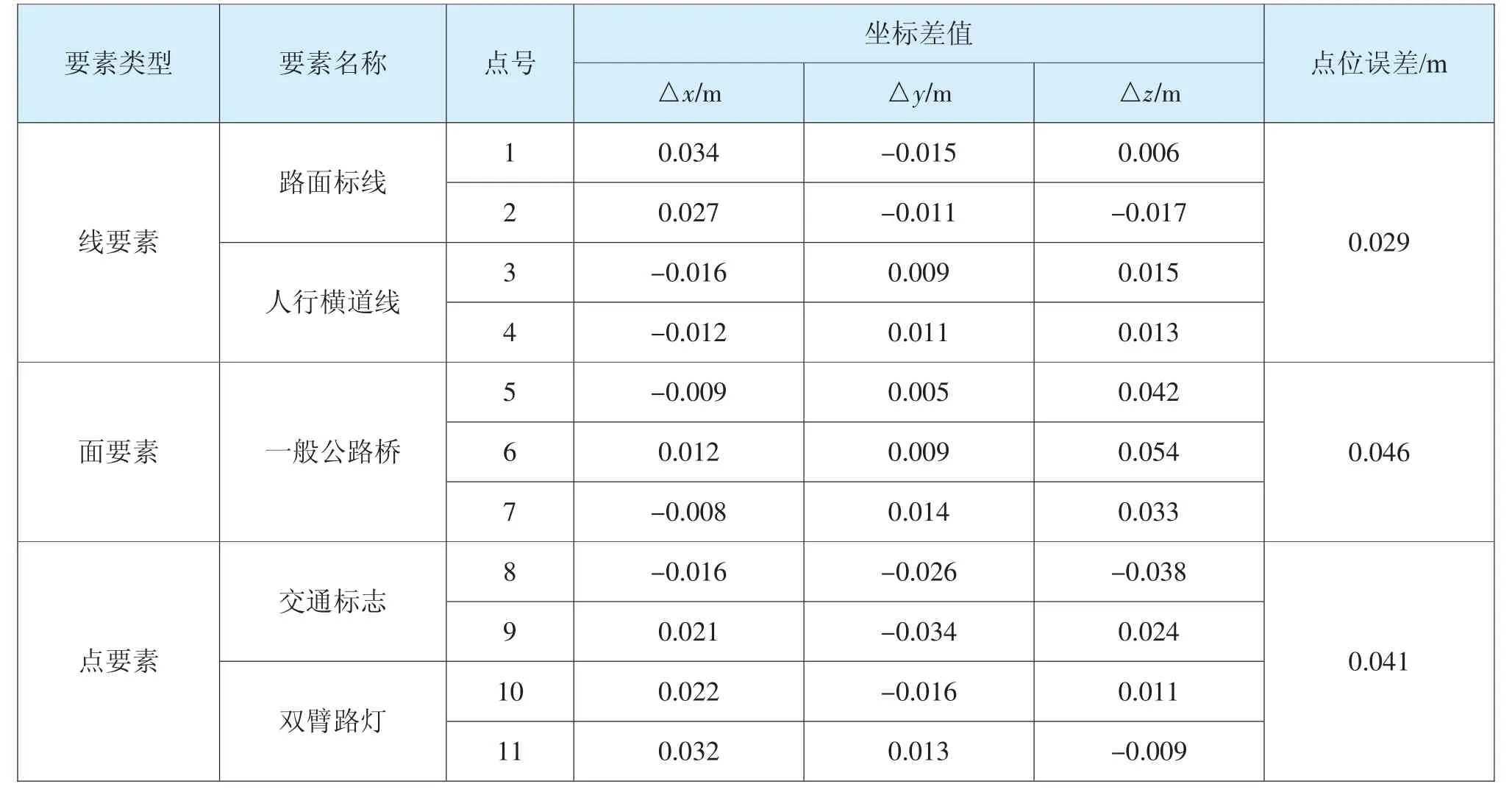
表1 道路要素智能化提取點位精度分析表
4.結束語
綜上所述,為了更好地解決道路全息測繪智能化提取程度不高、屬性不易擴展的問題,本文采用TOPODOT軟件進行全要素地形繪制,以廣州某道路數據為例,并對繪制結果進行點位精度分析。通過分析,驗證了點要素、線要素和面要素智能提取的準確性,為今后道路全息測繪工作提供了重要的參考數據。
猜你喜歡
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中國公共安全(2017年7期)2017-10-13 08:18:11
中華手工(2017年2期)2017-06-06 23:00:31
電子制作(2017年9期)2017-04-17 03:01:00
中外會展(2014年4期)2014-11-27 07:46:46
