基于ZigBee與STM32的叉車管理系統研究
2022-07-15 09:54:06李捍東
智能計算機與應用 2022年7期
周 祿,李捍東,覃 濤,徐 杰
(貴州大學 電氣工程學院,貴陽 550025)
0 引 言
隨著物聯網技術的蓬勃發展,物聯網技術滲透到各行各業。雖然物聯網技術滲透進了社會生活的各個方面,比如智能家居、智慧農業等領域,但仍有巨大的發揮潛能。由于各國企業來華投資,中國已成為“世界工廠”,如何打造以工業互聯網和智能制造為基礎的新競爭優勢,成為新時代的建設重點。智能工廠是指工廠的辦公、管理及生產自動化,與此同時生產安全和效率得到提升。目前在發達國家工廠管理人員可以通過叉車的實時工作狀態制定對整個廠區的叉車工作的合理調度安排,但是中國大部分工廠還未實現上述功能,所以造成巨大的人力、物力、財力資源浪費。物聯網的發展對車輛的智能化管理和控制提供了有力的技術支撐。
康昭等提出了射頻識別(RFID)和超寬帶(UWB)技術在智能倉儲管理系統中的聯合應用,但沒有考慮倉儲周圍環境,對叉車的情況缺失管理,缺少危險報警等安全措施;Sergiu等提出了一種基于物聯網設備的管理系統,系統由定位服務器、倉庫管理服務器和安裝在叉車上設備組成,并根據位置信息以及定位服務器從倉庫管理服務器獲得的信息,告知叉車操作員將要依照執行的各種動作,從而減少叉車行駛的距離以及搬運和裝載時間,實現了叉車的動作指導和定位服務,但是這種預測和指導會有延遲,如果能將叉車出入車間的情況通過RFID模塊上傳至數據庫,就能針對數據進行實時處理并作出決策,可以方便管理員的工作;Fabian Kirsch等利用本地雷達技術對物聯網環境的叉車等運輸車輛進行定位,使用了RFID模塊實現實時位置監測,并且利用超寬帶定位系統融合算法進行三維高精度對叉車定位,但是由于使用的是雷達系統,存在視野盲區而且容易被天氣或其它事物干擾,測量結果會失去準確度。
在工業4.0的背景下,物流貿易空前發展,中國急需建立智能化倉儲管理系統,叉車是物流行業不可缺少的工具,目前叉車智能化的程度還不夠,而且一般廠內需要專職人員對叉車定期進行檢查,造成成本浪費;其次故障排查人員不一定能及時有效精確定位到故障點,導致叉車本身可能會長期存在隱患點。
為解決上述叉車管理的問題,本文研究了基于ZigBee和STM32的叉車管理系統,能實時監測叉車,遇到叉車故障能手動上傳故障碼,管理人員收到后安排維修師傅針對具體問題現場修理,免去故障排查,有效提高工廠叉車管理水平,適應智能工廠的轉變。
1 系統總體設計
整個無線網絡采用ZigBee自組網、多點中繼,實現了樹形網絡拓撲結構。樹形拓撲結構是一種較為簡單的通信方案,圖1給出了一個典型的樹形結構,該拓撲結構的最大特點就是任意兩個節點的通信可以依賴路由器的輔助轉發完成通信,即便是兩個節點比較遠,也能借助路由器轉發消息。采用了樹形結構主要是考慮到這種結構的組網方式相對網狀結構,簡單且易于調試,傳輸距離比星形結構遠。
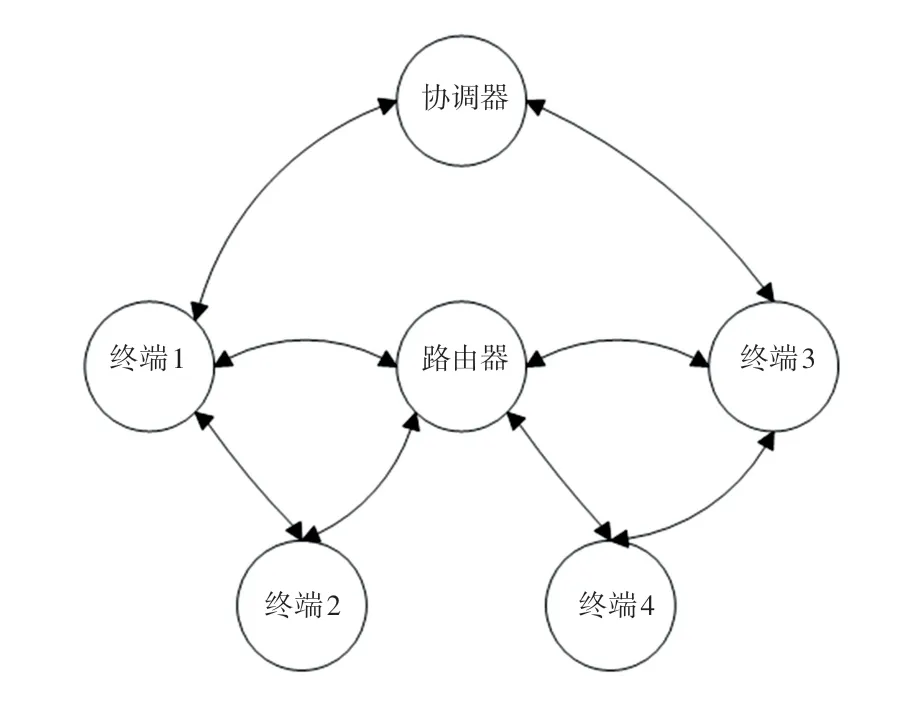
圖1 ZigBee樹形組網結構Fig.1 ZigBee tree networking structure
基于此結構進行軟硬件的開發和設計,同時對整個系統開展了多次組網測試,最終完成了調試。
叉車控制系統設計架構如圖2所示。由于在廠區有多個存儲廠房,所以需要多個這種叉車控制器,稍后介紹多個叉車控制器的總體架構布局。單個叉車控制系統架構包括多個模塊,包含液晶顯示、超聲波報警、RFID、供電以及供電檢測、叉車故障檢測上報幾大模塊,幾大模塊與主控集成在一個控制箱內,放置在叉車空閑位置。顯示模塊方便操作人員查看,比如RFID模塊檢測到當前叉車進入哪一個廠房等;叉車電池故障狀態包含過壓、欠壓、充電過流、放電過流、SOC過低報警;超聲波報警模塊主要是考慮到安全問題,設置一個安全范圍,通過限制叉車與物體間的間距在安全范圍內可以避免危險發生;叉車故障監測上報模塊上傳故障信息,通過將多種故障編碼來內置多種故障情況,當發生故障時駕駛員可以通過輸入相應故障代碼發送給后臺,管理人員可以及時派故障修理人員到場處理;射頻識別技術(RFID)是一項利用射頻信號實現無接觸信息傳遞,達到識別目標的技術。RFID模塊主要是用來確定叉車當前位置的;供電模塊為叉車控制器提供能源,不需要外界供能,供能模塊采用的是鋰電池供能。

圖2 叉車控制系統設計架構圖Fig.2 Design architecture of forklift control system
由于在廠區有多個存儲廠房,所以需要多個叉車控制器,需要多個控制器來進行協調,多臺控制器的系統的架構圖如圖3所示。
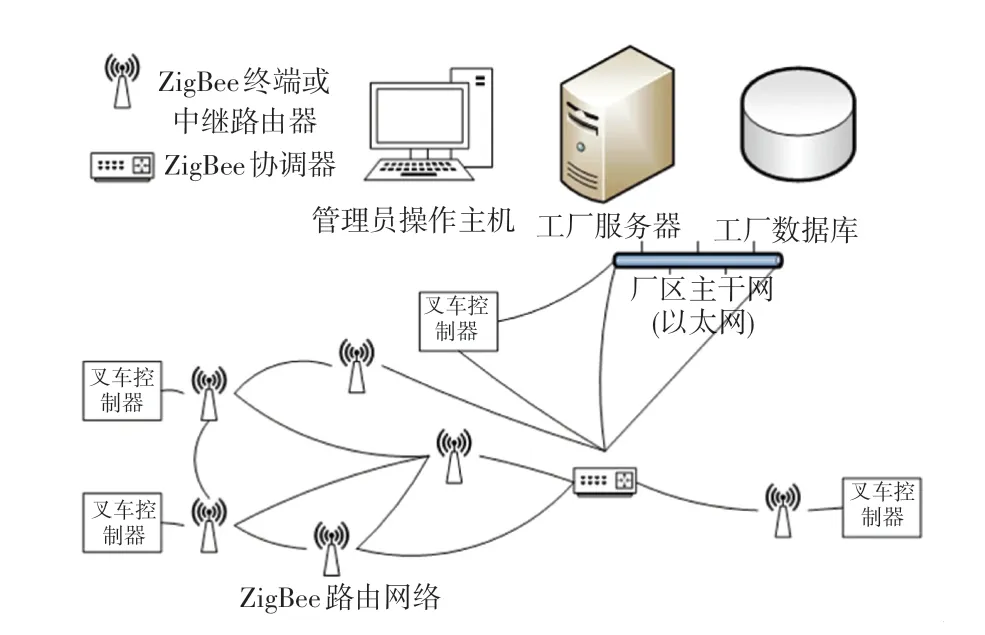
圖3 多臺叉車控制器的情況時系統架構圖Fig.3 System architecture diagram for multiple forklift controllers
在系統中需要傳輸的數據包括RFID標簽數據、故障信息,服務器接收到信息就會顯示具體位置及何種故障,管理人員能及時派遣人員處理故障。由于在局域網內使用自定義的報文,一定程度上規避了別人解析數據包的風險,提高了整個系統的安全性。
叉車控制器的主控芯片采用的是基于Cortex-M3內核的STM32F103單片機,其是叉車控制器的核心,為硬件系統提供處理能力,可實現硬件調度、數據回傳與接受、執行各種控制功能,基于STM32F103的集成電路板設計框圖如圖4所示。其中,叉車定位模塊使用的是RFID(射頻識別技術),其原理是利用標簽與閱讀器之間非接觸式通信,達到識別目標的目的。由于在工廠內,叉車和閱讀器之間的距離近,所以使用無源標簽,駕駛員進入某一個廠房時,使用電子標簽接近閱讀器,閱讀器讀取數據后將其解碼并將數據發送至服務器,將實時位置信息顯示在Web網站上,達到數據實時展示的效果。
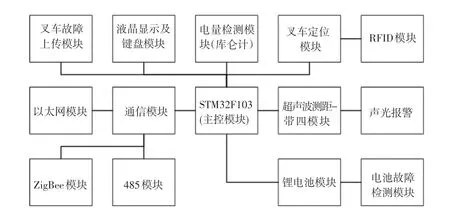
圖4 基于STM32F103的集成電路板設計框圖Fig.4 Block diagram of integrated circuit board design based on STM32F103
廠房區域內的通信使用的是ZigBee組網。ZigBee組網有3個特點:一是延遲短,ZigBee的響應速度快,從睡眠狀態切換到工作狀態僅需要15 ms,節點連接網絡僅需要30 ms;二是方便,ZigBee的通信控制要求非常低,可以節約通信成本,并且ZigBee免收專利費,其工作的頻段可免許可證,非常方便;三是ZigBee安全性高,使用加密算法提供數據完整性檢查和身份驗證功能。除了上述特點之外,ZigBee通信功耗極低,從而消除了充電或頻繁更換電池的麻煩。雖然ZigBee傳輸距離不長,一般來說點對點的傳輸范圍介于10~100 m之間,考慮到廠房內空間不大,故可以接受,ZigBee組網通信方式基本符合系統的設計要求。后臺與ZigBee協調器之間的信息傳輸通過局域網通信的方式,設置ZigBee協調器的IP地址都處于同一個局域網內,數據傳輸采用的是套接字通信和以太網傳輸方式。每個廠房之間數據的路由和轉發是通過ZigBee路由器級聯組網來實現傳輸的,最后數據會匯總到一片區域的ZigBee協調器,從而實現數據的長距離傳輸,最后通過套接字和以太網傳送給后臺服務器。
2 自定義通信協議
2.1 叉車故障狀態碼
叉車系統啟動后,遇到叉車故障時駕駛人員能夠手動在叉車控制器的鍵盤上輸入故障代碼,服務器程序能夠識別和解析故障含義。
叉車機械故障是指叉車在使用過程中出現的故障,分為6類,包含驅動故障、起升電機故障、加速踏板故障、電池故障、溫度過高以及其他故障,其它故障的故障碼為3,主要包括CAN通訊故障、開路或檔位問題等一些不常見的故障;驅動故障定義為0號故障,又可具體分為驅動邏輯故障一到驅動邏輯故障三,將故障狀態碼定為01-03,此外還有驅動電機三相線故障、驅動邏輯故障等若干項驅動故障等,1號故障確定為叉車起升故障,主要有起升邏輯故障一到起升邏輯故障三,此外還有起升電機故障等;加速錯誤定為2號故障,主要是加速踏板的問題,有加速踏板誤觸和加速踏板故障兩種錯誤;電池錯誤是4號故障,包括電池電量不足和電壓不足等故障;5號故障主要是叉車在過度運行或者是冷卻系統出問題時會產生異常高溫的情況,主要分為啟動電機模塊溫度過高、起升電機溫度過高等情況。
2.2 RFID協議碼
EPC(Electronic Product Code)是用來標識目標的特定代碼,可應用在生產、物流、跟蹤等物聯網場景中,易于使用和維護,成本較低。通過標簽制作軟件可以寫入RFID標簽的EPC號。定位規則:使用4個字節儲存信息,其中首部字節標識進出狀態,01表示進入狀態,00表示離開狀態;第二個字節標識樓號,由01、02、03這3個標識代表3棟樓,04標識充電間,05和06標識兩個雨棚;第三個字節標識層號,若第二個字節不是01、02、03表示沒有層號,這時用00代替;最后一個字節表示具體倉庫,每層樓一共3個倉庫,若該段信息不表示樓層,則用00標識。例如:01010101表示進入1號樓1層1號倉庫。標簽的識別是使用UHF讀卡器,將UHF讀卡器的波特率設置為57 600 bps。設置好單張標簽過濾時間為1 s(可設置其他值),開啟蜂鳴器,UHF讀卡器將讀取到電子標簽的信息。
3 叉車管理系統設計
3.1 數據表設計
數據庫是用來存儲必要信息的。MySQL數據庫體積小、開放源代碼,有著廣泛的應用。共設計3張表,分別是設備表、設備數據存儲表、用戶表,見表1~表3。
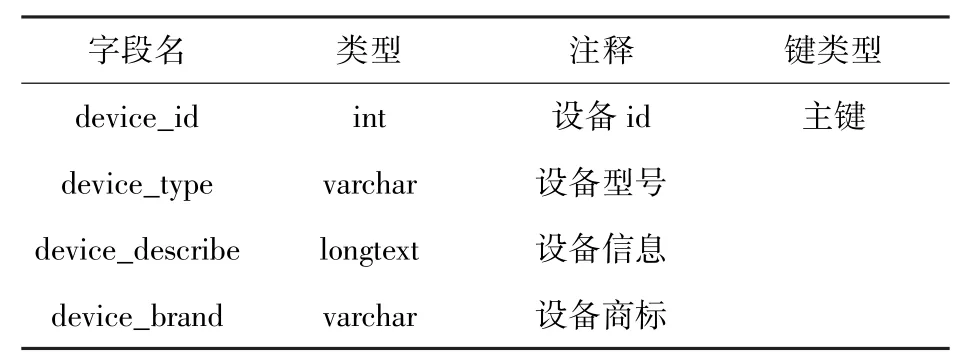
表1 設備表Tab.1 Equipment table

表2 設備信息表Tab.2 Device information table
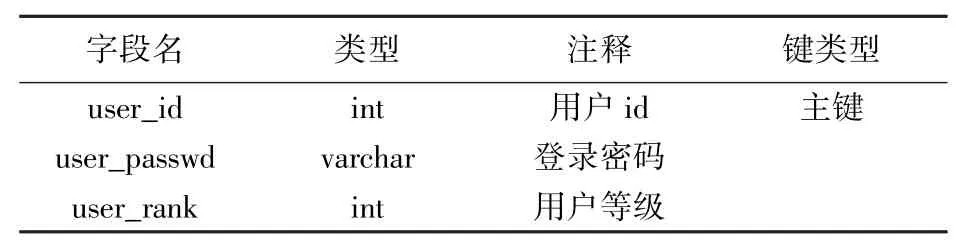
表3 用戶表Tab.3 User table
3.2 網頁設計
網站后臺有以下功能:①實時顯示功能;②歷史數據查詢功能;③數據分析功能。其中,實時顯示功能需要實時顯示充電間以及1、2、3號庫房范圍內連入ZigBee自組網不超過3臺的叉車(根據交付的硬件數量)狀態信息和位置信息;歷史數據查詢需要能夠查詢重要的歷史數據以及報警記錄,例如異常報警等信息;數據分析功能需要根據數據分析叉車使用率、工作效率車輛狀態、定期提醒、保養與維護等。
人員分為操作人員和管理員,管理員可以增添操作人員信息,管理人員和操作人員可登陸查看叉車當前運行與叉車運行歷史信息,后臺運行信息界面如下圖5所示。

圖5 運行信息界面Fig.5 Operation information interface
4 結束語
本文介紹了基于STM32和ZigBee的工廠智能叉車管理系統的自擬協議和軟硬件設計,所設計的系統可為當前國內大部分工廠服務,主要體現在以下幾個方面:
(1)設計了一種智能且方便的控制方式,能夠大幅度減小工廠叉車操作人員以及管理人員負擔;
(2)研究了叉車常見故障,對叉車易出現機械故障情況進行了編碼,方便操作人員將故障碼上傳,以及后臺解析故障碼;
(3)系統實現在叉車的工作范圍、停放區域以及廠區等其它地方對叉車的定位,定位精度到10 m內的范圍,空間精度精確到當前所在樓層及區域,保障了叉車安全區域內活動,保障廠房財產安全;
(4)系統能夠存儲重要的實時數據以及報警記錄,在系統的后臺還能對這些信息進行大范圍查詢和維護。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中華手工(2017年2期)2017-06-06 23:00:31
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32