多時段不同定位精度的無人機影像點云的對比分析
2022-07-13 07:52:26張和川黃洪宇陳崇成
福州大學學報(自然科學版) 2022年4期
關鍵詞:區域
張和川, 黃洪宇,陳崇成
(福州大學空間數據挖掘與信息共享教育部重點實驗室, 福州大學地理空間信息技術國家地方聯合工程研究中心,福建 福州 350108)
0 引言
近年來無人機(unmanned aerial vehicle, UAV)作為攝影測量的新生力量,為遙感技術注入了新的活力[1]. 無人機及計算機視覺的迅速發展,特別是與運動恢復結構技術相結合,無人機影像可得到高度自動化處理,場景以三維點云形式重建,密集的攝影測量影像點云提供了高精度的三維信息[2]. 對國土測繪與海洋島礁測繪的實際應用、資源保護與自然災害防治等方面有十分重要的意義[3-5].
當前無人機航測流程中,地面控制點(ground control point, GCP)的測量和標注是很重要的步驟. GCP指能在影像上清楚辨別,具有明顯特征和地理坐標的地面標識點,又分為控制點和檢查點,分別用于空中三角測量的優化和精度檢查. 無人機攝影測量引入高精度的GCP,可在地形復雜、環境惡劣區域采集高精度的影像數據[6]. 但許多實際應用中,高精度的GCP難以采集,如監測火山的形態變化[7]、山體滑坡[8]、大壩侵蝕[9]等. 減少傳統航測所需的GCP,簡化作業流程,降低時間成本,純粹利用RTK技術的想法(即僅使用無人機RTK模塊,而不需要GCP對模型精確定位)非常有吸引力[10],減少人類非必要的體力勞動和提高工作效率是技術發展的趨勢之一. UAV安裝GNSS系統并搭載RTK模塊能夠以厘米級的準確度確定無人機的位置[11-12]. 以大疆創新公司生產的精靈Phantom 4 RTK(集成RTK模塊,簡稱P4R)為例,產品介紹能實現無人機免像控進行低空航空攝影測量.
影響無人機影像精度的因素包括是否引入GCP、是否使用RTK功能等,有經驗表明數據采集的時間也對影像精度存在影響. 文獻[13]指出僅依靠機載RTK而不使用GCP進行無人機影像處理時模型精度不準確,特別是無人機影像模型的垂直分量誤差較大; 文獻[14]使用集成了RTK模塊的固定翼無人機并降低飛行高度驗證不使用GCP的模型精度,結果表明垂直分量效果較差需加入少量GCP改善; 文獻[15-17]指出,通過設計交叉航線或后差分處理辦法,在一些應用場景與使用GCP的方法相比,RTK數據可以提供足夠甚至更高的準確性. 無人機在何種條件下能真正做到免像控; 無人機集成的RTK模塊對照片空間定位的作用及對最終影像處理結果精度的作用有多大; 一天中不同時間采集是否會對影像處理結果的精確度產生影響,這些都是本次實驗試圖回答的問題.
本研究基于P4R在不同時間段采集不同定位精度(打開或關閉無人機集成的RTK模塊)的無人機影像,影像處理時引入或不引入GCP; 通過軟件生成密集匹配點云,解算相機定位和GCP的精度,以及利用實測值對各類型的影像點云精度分析,探究不同時間段、不同參數的無人機影像點云精度差異,為無人機在森林資源調查、變化檢測、自然災害預警與恢復等方面,提供優質數據采集的借鑒和參考.
1 研究區和數據來源
1.1 研究區概況
在福建省福州市福州大學旗山校區內,選取兩個具有不同地形地貌特征的實驗區(見圖1)進行研究(Ⅰ:平地實驗區,以建筑為主,地表建筑規則且分布均勻; Ⅱ:山地實驗區,地表以植被為主,地表高程起伏約70 m),獲取了兩個實驗區不同時間段、不同定位精度(有/無RTK)的無人機影像.
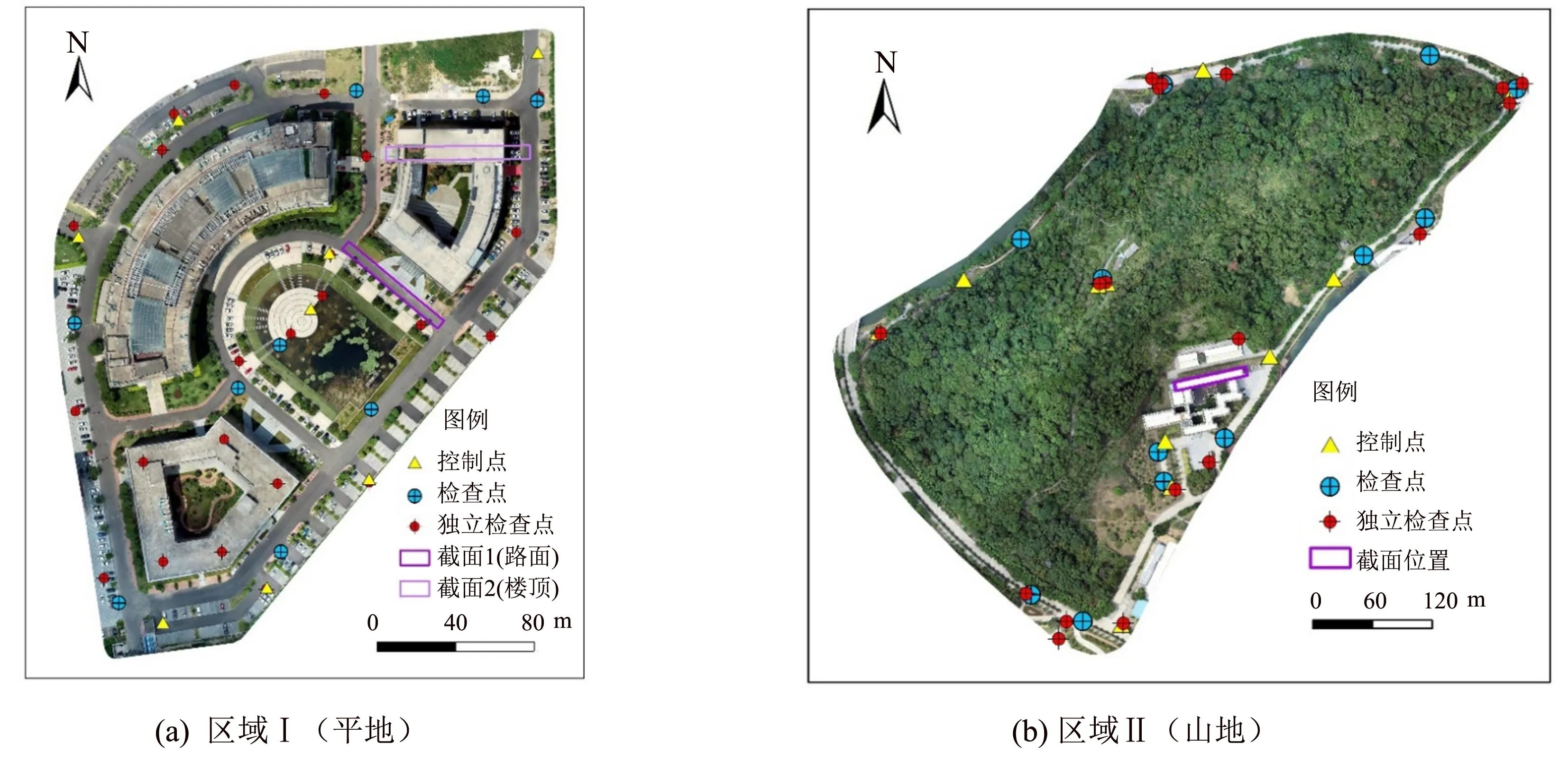
圖1 研究區的位置Fig.1 Location of the research areas
1.2 無人機影像采集
使用P4R無人機進行數據采集. P4R搭載一體化云臺相機,等效焦距為35 mm,照片的有效像素為2 000萬(5 472 px×3 648 px). 在GS RTK App軟件中規劃航線并設置影像分辨率和重疊率(航向和旁向重疊率),相機鏡頭為垂直下視. 將規劃好的航線信息上傳飛控系統后,無人機自動起飛并執行任務.
于2020年8月25日,晴天無云層遮擋,在兩個實驗區(平地Ⅰ和山地Ⅱ)的3個時段中,分別對每個實驗區采集了兩個架次的無人機影像:打開或關閉無人機集成的RTK系統各一架次,共獲取了12個架次的無人機影像數據集. 平地實驗區相對飛行高度91 m,獲取233張照片,地面分辨率約2.3 cm,覆蓋區域面積0.184 km2; 山地實驗區飛行相對高度182 m,獲取161張照片,地面分辨率約4.5 cm,覆蓋范圍0.629 km2. 兩個實驗區的航向重疊率均為80%,旁向重疊率均為70%. 每個架次的飛行時間是10~15 min,無人機影像采集的詳細時間如表1所示.

表1 無人機影像采集時間
1.3 地面控制點和獨立檢查點的測量
地面控制點的測量是在無人機航測之前進行的,而獨立檢查點的測量是在無人機影像密集匹配點云生成后進行的; 因此地面控制點(包括控制點和檢查點)和獨立檢查點兩種數據的采集時間具有先后順序,為保證結果的準確性,地面控制點和獨立檢查點的分布位置及數量應當具有差異性,但兩種數據的測量方法相同,均使用華測測地型GNSS RTK接收機(i70)采集CGCS2000坐標系下實驗區的若干個點. i70的平面測量精度為±(8+1×10-6×D)mm,高程精度為±(15+1×10-6×D)mm(D表示距離),利用福建省的衛星導航連續運行參考站聯網測量. 遵循控制點布設原則,保證特征明顯,均勻分布,為保證成果的平面和高程精度,每個點采集3次取均值作為該點的坐標.
2 研究方法
2.1 數據處理
根據無人機影像采集和處理的不同參數設置(影像采集時是否使用RTK,處理時是否引入GCP),每個時段影像處理結果分為4種類型:A(無RTK無GCP),B(有RTK無GCP),C(無RTK有GCP),D(有RTK有GCP). 每個實驗區共采集6個架次的無人機影像數據集,2個實驗區獲取了12個影像數據集,每個影像數據集按照兩種不同方式處理(引入或不引入GCP),最終生成24個不同的影像密集匹配點云.
本次P4R采集無人機影像采用的是WGS84地心坐標系(world geodetic system 1984,WGS84),地面控制點的測量采用2000國家大地坐標系(China geodetic coordinate system 2000,CGCS2000); 為保證成果的精度,統一將無人機影像導入Agisoft Metashape軟件中,并加載地面控制點坐標,利用該軟件將無人機影像點云坐標系轉換為CGCS2000坐標系; 為了能在同一坐標系中分析數據,統一將無人機影像導入Agisoft Metashape軟件,利用該軟件輸出CGCS2000坐標系的無人機影像點云.
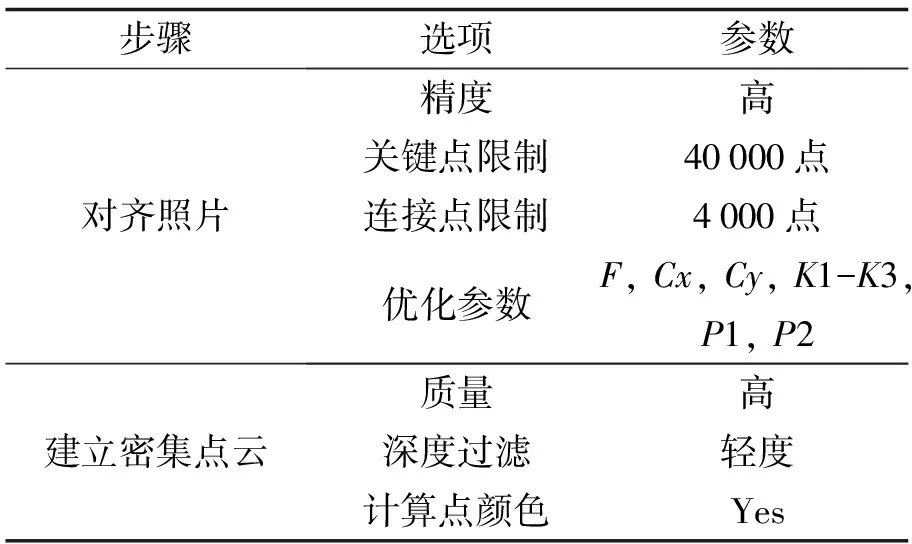
表2 Agisoft Metashape軟件的具體參數設置
無人機影像處理主要采用Agisoft Metashape,輔以Pix4dMapper. 軟件處理的參數如表2所示. 軟件處理流程先根據影像特征點進行空中三角測量(對齊照片),后通過算法重建密集點云. 本研究僅對生成的影像密集匹配點云的精度比較分析.
2.2 精度評價
采取多種方式進行精度驗證和評價. 使用華測i70采集地面控制點,分析點位精度; 接著分析影像處理軟件對每個無人機數據集得出精度報告,此報告提供了軟件解算得出的照片位置及像控點精度信息.
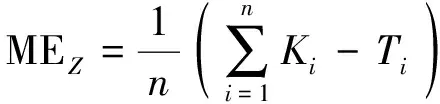
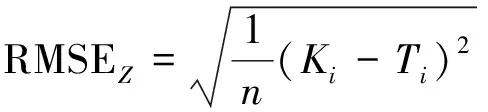
其次,實地采集實驗區的獨立檢查點坐標(x、y、z),并利用無人機影像得到實驗區密集匹配點云,在影像密集匹配點云中找到獨立檢查點對應位置的點,獲取該點的坐標(x、y、z),計算兩者之間的平均差(ME)、均方根誤差RMSE,計算公式如下:
(1)
(2)
其中:以縱坐標z為例,平均誤差為密集匹配點云高程Ki與實測獨立檢查點高程Ti差異和的平均; 均方根誤差是密集匹配點云高程Ki與實測獨立檢查點高程Ti偏差的平方與實測點個數n比值的平方根.
最后,將無人機影像匹配點云切片(如圖1矩形區域),通過截面比較不同數據集的高程差異.
3 實驗結果與分析
3.1 地面點測量的精確性評價
平地布設8個控制點,9個檢查點; 山地布設11個控制點,12個檢查點. 計算地面點的標準偏差,保證每個點精度,是保證影像點云模型精度的前提,經統計所有地面點的方差均在毫米級,滿足實驗要求.
3.2 照片位置和像控點的精度
Agisoft Metashape軟件解算無人機影像得到密集匹配點云,軟件提供解算的精度報告,能說明影像數據本身定位的準確性. 表3計算了平地和山地的3個時段、4種類型的平均相機位置精度,其中“+”代表打開RTK功能,“-”為關閉RTK功能. 分析可得:不考慮GCP時(A、B類型),無人機采集數據時有RTK功能與無RTK功能的定位精度差異在10倍以上,使用RTK功能時相機位置精度保持在厘米級,而無RTK時精度在米級. 區域I的A類型的xyz均值差異在0.7~1.1 m,而B類型僅為0.03~0.05 m; 區域II中,A類型xyz均值差異為0.6~1.0 m,而B類型約為0.1 m. 當考慮GCP時(C、D類型),此時均引入GCP參與計算,3個時段D類型的xyz均值均優于C類型,C類型xyz均值差異較大.
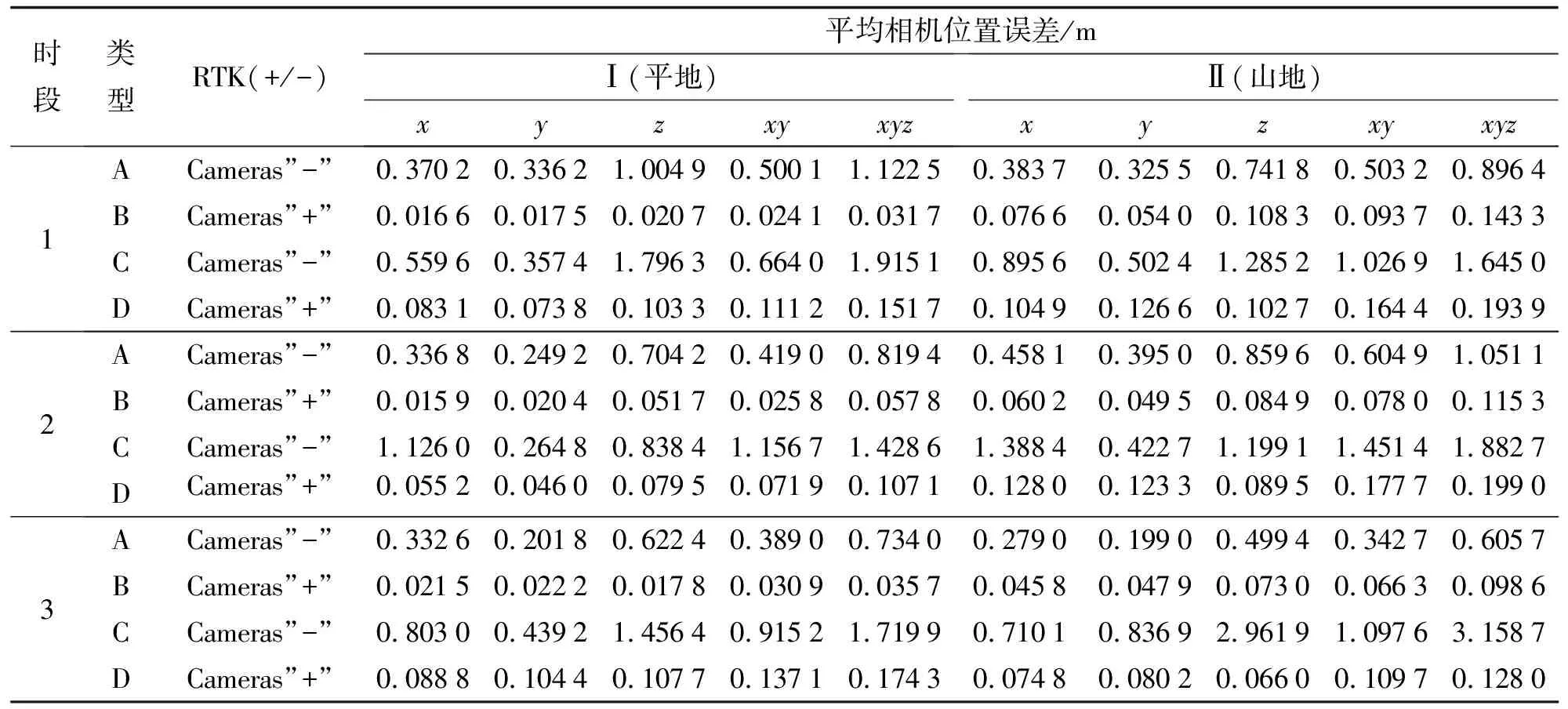
表3 實驗區軟件解算的平均相機位置精度
無人機數據采集的時間對結果也有所影響. 在區域I中C類型最小的xyz均值為第二時段采集的數據,D類型最小的相機位置均值也為第二時段采集的數據; 在區域II中,第一、二時段獲取的C類型的相機位置均值差異較為接近,而第三時段差異較大,約為前者的兩倍. 區域I無論是C或者D類型,第二時段獲取的數據的xyz均值最小; 區域II中,第一、二時段參數的均值差異較為接近,優于第三時段.
區域的地形地貌對影像處理結果存在影響. 表3可得,僅使用B類型(即有RTK無GCP),區域I的模型精度遠高于區域II,此時影像點云模型精度僅僅由無人機集成的RTK模塊決定; 相同條件下,地貌不同,影像點云模型精度差異巨大,表明不同地貌條件對影像處理結果具有影響. 為驗證此發現,采用Pix4dMapper比較了兩個區域照片中檢測和匹配到的特征點或同名點數量,山地區域每張照片的平均特征點數量(6.6萬個)大于平地區域(5.6萬個); 但比較匹配的特征點(同一特征點至少在3張照片中出現)數量時發現,平地區域每張照片中匹配的特征點(1.78萬個)大于山地區域(1.56萬個). 平地均為規則建筑,紋理特征豐富,利于軟件獲取同名點; 而山地均被植被覆蓋,紋理特征匱乏,模型重建難度較大. 特別地,當采用D類型時,山地模型精度明顯提高,證明影像模型重建時引入GCP參數具有必要性,尤其在地表缺乏豐富紋理特征時,引入一定量的GCP可以提高成果精度.
3.3 獨立檢查點驗證
為進一步研究點云模型精度,在研究區實地采集了一定數量、分布均勻、高度不一、特征明顯可視的獨立檢查點的坐標,并在無人機影像密集匹配點云中找到相對應位置的點獲取該點的三維坐標,計算對應點之間的坐標差值,從而評價影像點云模型精度.
3.3.1平地實驗區獨立檢查點驗證
平地實驗區共采集23個獨立檢查點,選取無人機密集匹配點云中的驗證點,計算檢查點與驗證點的平均差、RMSE,驗證不同時段不同參數無人機影像點云的精度,表4為區域I獨立檢查點驗證結果. 從表可得,RTK和GCP均能提高無人機影像點云精度. 無人機既不使用RTK也不引入GCP時,獲取到的模型精度不高,誤差約1 m(即A類型); 使用RTK或者GCP后,精度均能提升到厘米級. 使用RTK后(即B類型),三個時段的影像點云驗證點與獨立檢查點的x方向平均差值約為0.059~0.070 m,y軸方向的平均差值最大為0.07 m,最小僅毫米,最大高程平均差值為0.03 m; 引入GCP但不使用RTK時(即C組合)也得到了類似結果,值得注意是使用C類型獲取到的數據質量更高,x軸的平均差相較于B類型均能提升約0.02 m,在第二時段中,兩者高程的平均差值相近,但C組合的均方根誤差比B組合小,說明數據質量波動更小; 同時使用RTK和GCP參數(即D類型),獲取的數據精度與C類型相似,差值很小.
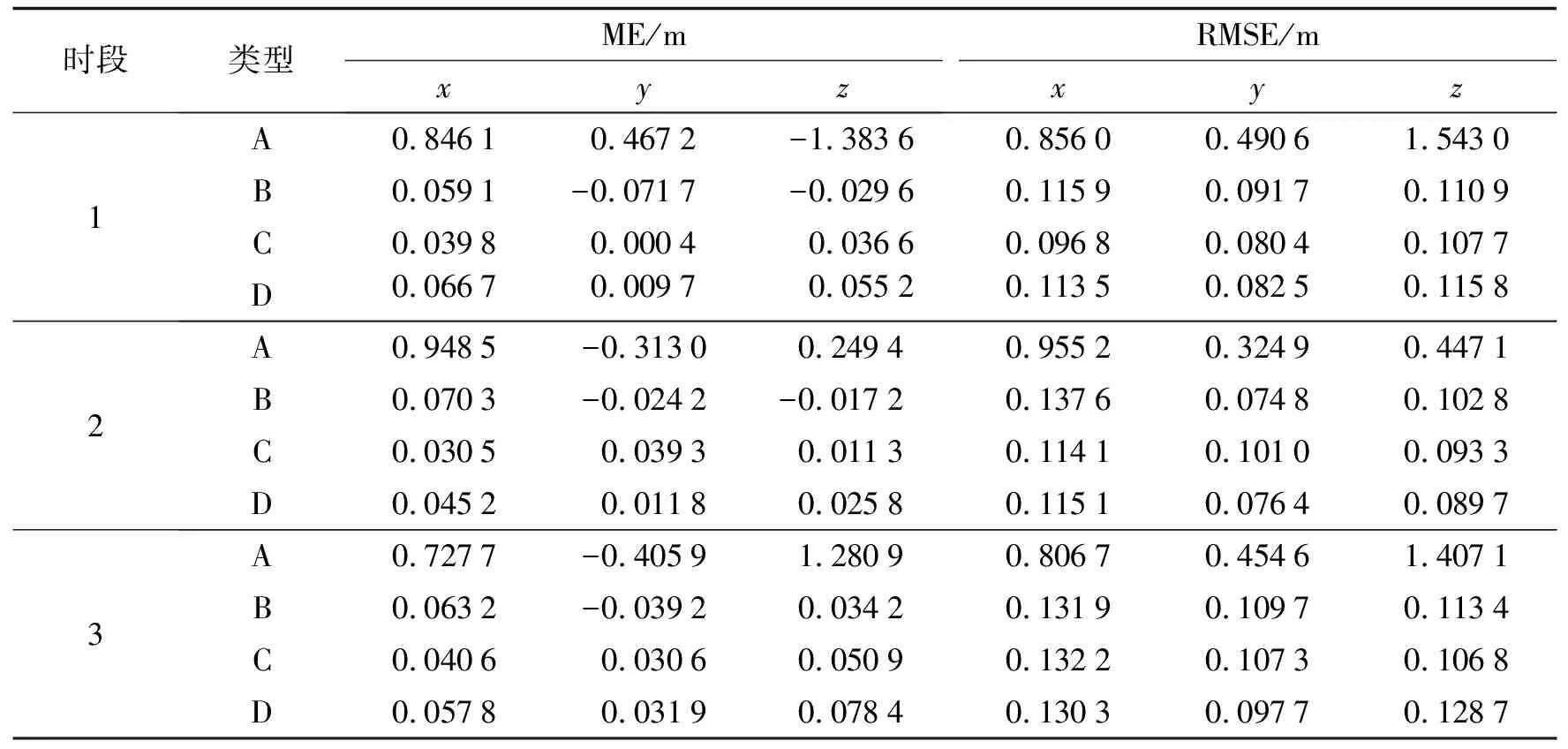
表4 區域Ⅰ(平地)獨立檢查點驗證結果
3.3.2山地實驗區獨立檢查點驗證
區域Ⅱ(山地)共采集18個獨立檢查點,采用與區域I相同的方法對無人機密集匹配點云進行精度驗證,表5為區域Ⅱ獨立檢查點驗證結果.
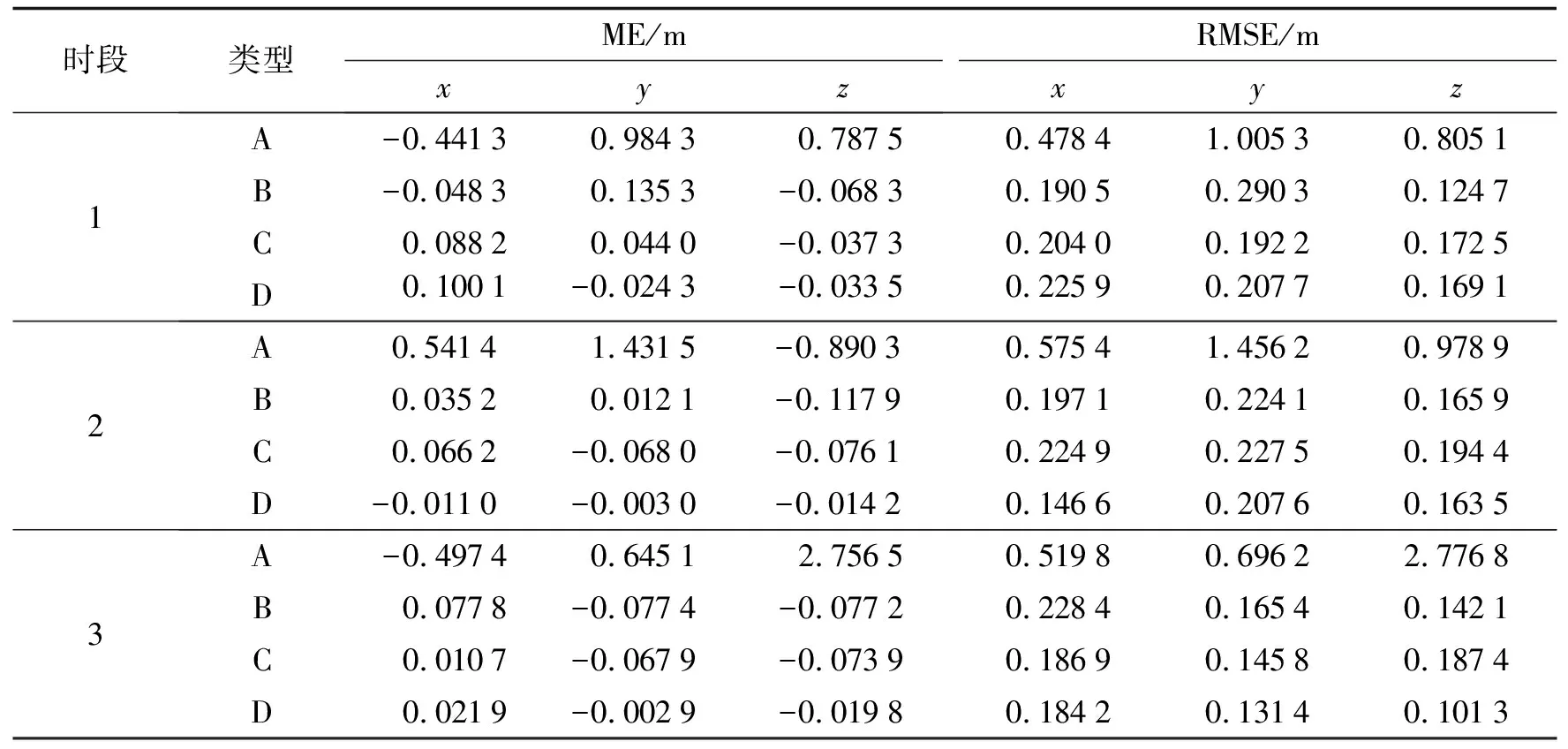
表5 區域Ⅱ(山地)獨立檢查點驗證結果
比較山地區域的獨立檢查點結果,可得到與平地區域相似的結論,使用RTK或引入GCP均能提升影像點云精度. 使用RTK時,3個時段的影像點云驗證點與檢查點在x軸方向的平均差值最大約為0.07 m,y軸最大約0.13 m,z軸高程最大約0.11 m; 引入GCP時,3個時段的驗證點與實測點的平均差值x軸最大約0.08 m,y軸最大約0.06 m,z軸最大約0.07 m,相較于前者有所提升; 同時使用RTK和GCP時,第二時段x軸驗證點與實測點的平均差值最小約0.01 m,y軸約0.003 m,此刻獲取到高程差值約0.01 m,相較于單獨使用RTK或者GCP,此時獲取到標準偏差更小,數據質量更好.
區域特征對模型精度也具有影響. 平地不同時段、不同類型(B、C、D類型)的坐標的均方根誤差約為0.1 m,均小于山地坐標的均方根誤差,說明區域地表特征豐富時采集到的無人機影像數據質量更高.
3.4 截面點云精度對比
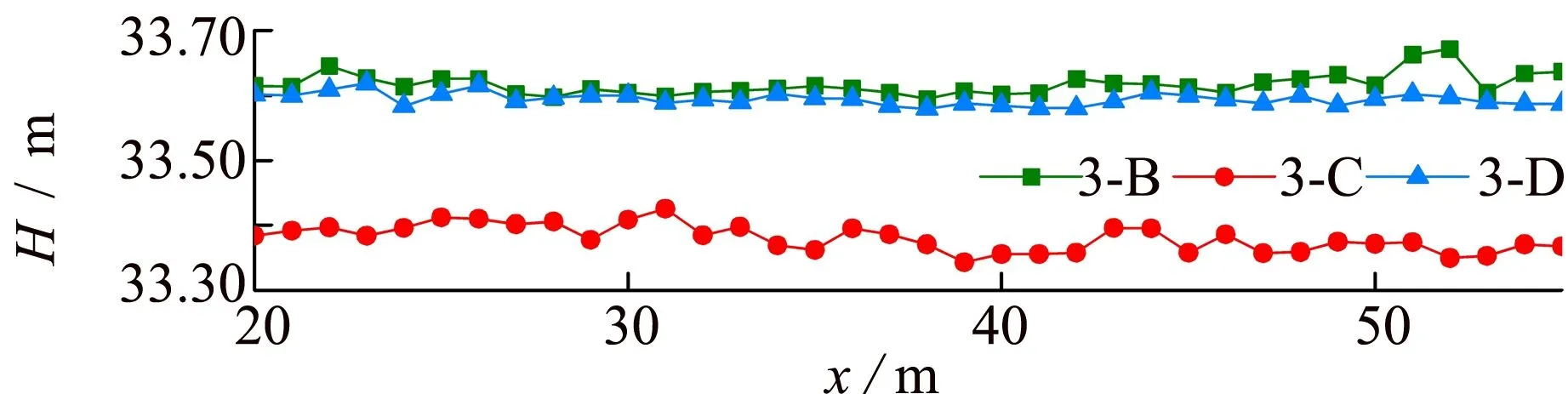
3.4.1平地實驗區截面點云數據對比
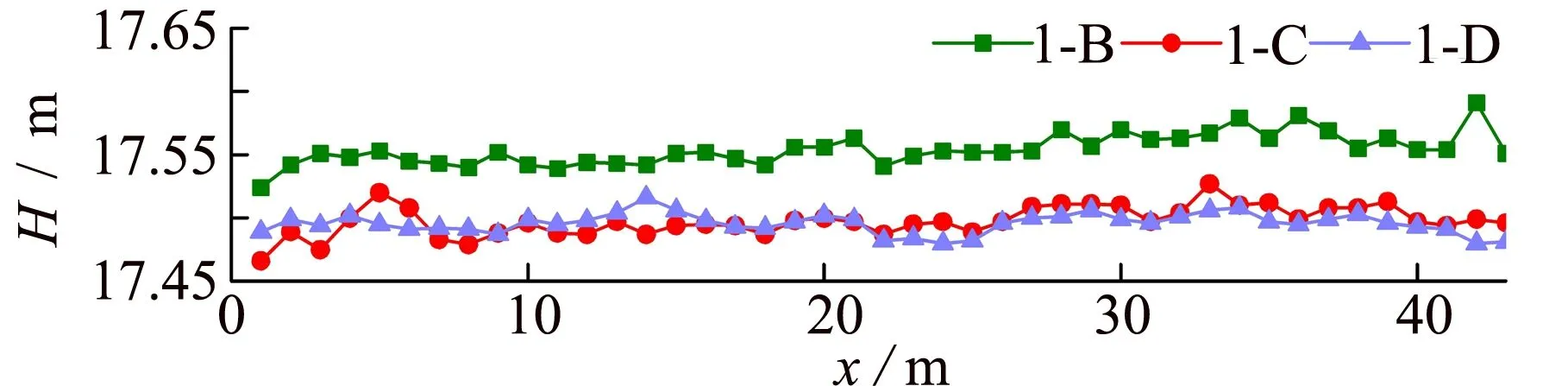
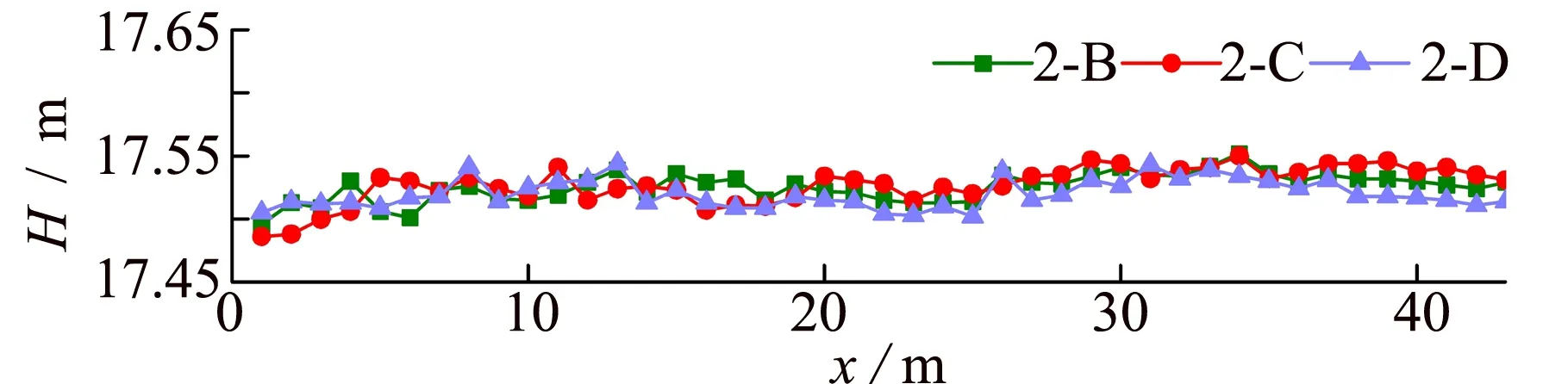
本節利用點云截面對比不同時段不同參數的無人機影像點云精度. 獲取了3個時段中B、C、D參數類型的截面點云(A類型沒有RTK或GCP進行精度矯正,誤差較大故不在此討論),并分別比較. 由圖2可得,第一時段采集的影像點云精度差異較大,B組合與C、D組合差異明顯; C、D組合中,可從圖中發現在0~10 m處,D組合數據更為穩定、波動較小,由第一時段可得D類型獲取的無人機影像點云數據質量更高; 第三時段數據波動較大,質量較差; 第二時段數據無明顯波動,質量較高,各個類型的數據均無明顯波動,整體而言精度遠大于第一、第三時段. 圖中橫坐標x表示點云空間上的x軸距離,縱坐標H代表點云空間上的距離,下同.
(a) 上午時段
(b) 中午時段
(c) 下午時段 圖2 平地區域各時段B、C、D參數點云截面(路面)對比Fig.2 Comparison of B, C, D parameter point cloud cross-sections (road surface) in flat areas
3.4.2山地實驗區截面點云數據對比
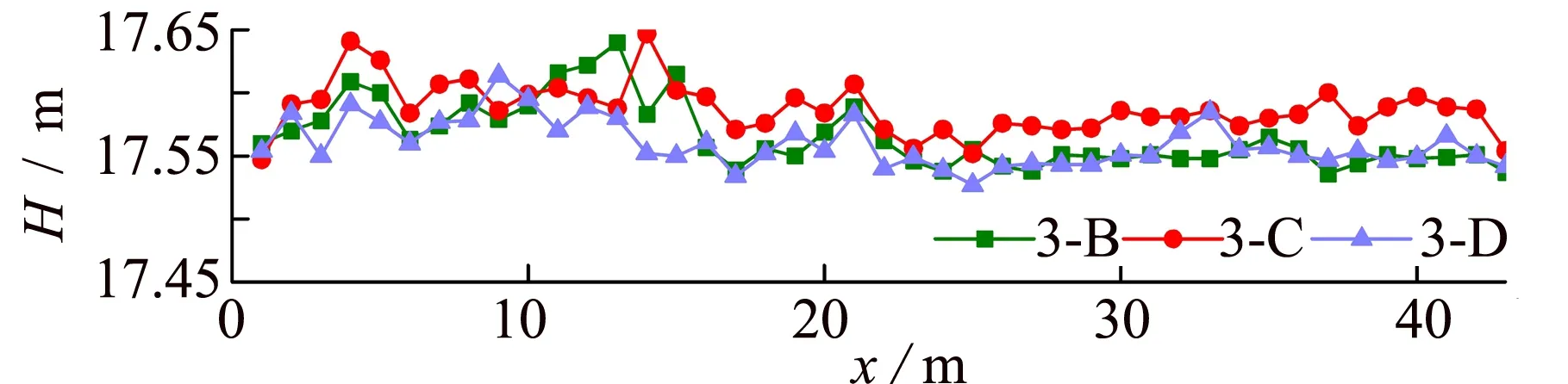
山地實驗區選取建筑物頂部,分別獲取3個時段的B、C、D類型影像點云截面,如圖3所示. 第一、二時段獲取到的數據質量較好,各類型得到結果的差異小; C類型影像點云精確度略有波動,在第三時段中,C類型數據精確度明顯降低.
(a) 上午時段
(b) 中午時段
(c)下午時段 圖3 山地區域各時段B、C、D參數點云截面(樓頂)對比Fig.3 Comparison of B, C, D parameter point cloud cross-sections(building roof) in various periods in mountainous regions
4 討論
根據前文的分析結果,UAV打開集成的RTK模塊或引入GCP均能有效的提高模型精度. 當地表特征豐富時,無人機憑借集成的RTK模塊能一定程度實現免像控采集高精度的影像; 當地表特征不明顯、缺乏豐富的紋理特征時,加入少量的GCP能提高成果精度; 總的來說,打開集成的RTK功能并引入GCP能有效的保證獲取到高精度的UAV影像. 不同時段獲取到的影像精度也略有不同,中午時段數據采集具有優越性; 獨立檢查點驗證3個時段的D類型誤差精度比較中,中午誤差精度最小,尤其是高程的平均差、均方根誤差均優于其余兩個時段,且B類型的比較也證明了此結論. 造成此結論的原因:考慮為中午時段(正午12點)太陽高度角最大,光線最充足,輻射強度最強,此時太陽照射物體的陰影面積最小; 而其他時段太陽斜射地面,太陽高度角變小,光線照射相對不充足,導致不同時段的無人機影像點云精度存在此種差異; 截面精度對比時,下午路面的截面波動較大,上午和中午波動較小,說明下午易受到外界干擾(如光線不足及附近建筑物遮擋等),平地區域樓頂截面穩定,第二時段的差異相對最小,此時山地區域下午時段樓頂截面波動較大. 由于本次實驗的平地和山地區域航高不一致,存在些許不同,可能對結果產生一定影響,為此將在后續的實驗中保持航高一致,并增加地形起伏變化較大區域作進一步研究.
一天之中可以認為植被、建筑的形態結構沒有發生可辨的變化,但不同時段得到的重建場景的三維形態存在著差異. 這個差異是由技術方法的局限性、獲取的影像質量、數據處理算法等諸多因素造成的,表征了測量值內在的不確定性; 進行變化檢測時需要考慮這些內在的誤差,選擇正確的閾值來判斷變化是否發生,以及發生的變化的大小. 從本研究中得出的結論對于使用無人機影像的森林資源調查和研究應用、城市規劃、災害防治等方面具有參考和借鑒作用.
5 結語
本研究對多時段不同定位精度(有/無RTK,有/無GCP)的無人機影像點云精度進行對比分析,分析了可能影響成果精度的幾個因素. 實驗結果表明:地表特征豐富時,無人機能在一定程度上免像控采集數據,生成的影像點云模型與引入GCP獲取的影像點云模型高程精度差值僅為厘米級; 引入GCP可以提高模型精度,尤其是地表缺乏豐富紋理特征時效果顯著,因此最好的建議是使用RTK并引入GCP進行數據采集; 一天中不同時間段采集無人機影像會對影像處理結果產生影響,中午時段光照條件最好時獲取的數據質量精度最佳,其他時段次之.
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15
