智能設備無線通信控制系統的研究
2022-07-11 05:19:34許浩宸徐健范嘉欣曹萌鄭丹杰
工程技術與管理 2022年10期
許浩宸 徐健 范嘉欣 曹萌 鄭丹杰
江蘇師范大學科文學院,中國·江蘇 徐州 221000
1 引言
隨著人工智能在生活中的日漸普及,智能設備設計也越來越擬人化,智能設備能代替人類高效地完成很多復雜的工作,但是在目前這個階段,它始終還是一個指令接收者,需要操作者通過控制器對其進行操控,因此控制系統設計的好壞對智能設備性能的影響是至關重要的,隨著現代通訊和微電子技術水平的不斷進步,現代控制模塊設計越來越向著小型化和智能化方向發展,DSP集成度高、性能強大、價格便宜,并且在設計階段可以實現軟硬設計分離,因此基于數字信號處理器的設計模式成為智能設備嵌入式控制模塊中的首選方案。
智能設備控制模塊的設計經歷了三個比較重要的發展階段,最早期的是集中控制設計模式,主要利用一臺PC機完成全部的功能;再往后就發展到了分層控制設計模式,有了一定程度的組織功能、協調功能和調度功能。如今,在萬物皆可聯網的時代,分布式控制設計模式才是最理想的實現方式,分布式控制系統可以集中監控和管理,在各模塊之間、軟硬件之間實現了解耦,使得效率和成本都得到了很大程度上的優化。
2 基于無線通信的智能設備系統總體結構設計
無線通信智能設備的總體結構主要包含智能設備和負責無線通信的控制系統,整體結構如圖1所示。
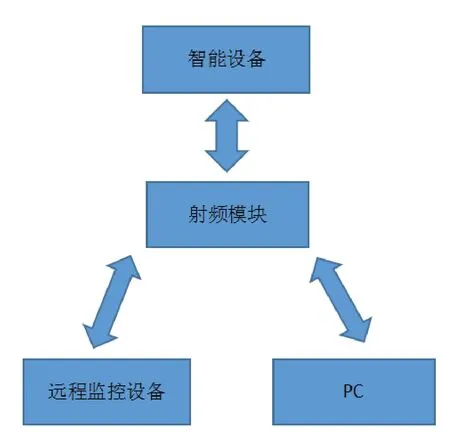
圖1 無線通信智能設備的總體結構示意圖
智能設備由射頻模塊發出的無線信號直接控制,信號是按照事先約定的協議格式進行編碼,智能設備身上的無線接收模塊收到信號后,會對信號進行解碼,然后生成對應的指令用來控制智能設備完成各自設計好的功能。
3 基于無線通信的智能設備控制模塊設計
控制模塊是智能設備系統中最為核心的部件,決定著智能設備的智能化程度,控制模塊主要負責智能設備行為動作和信息接收處理,如能控制機器人進行有效的障礙物避讓、運動目標跟蹤和對周圍環境搜索。控制器主要基于DSP硬件平臺,以C語言作為軟件開發工具,其組成示意如圖2所示。
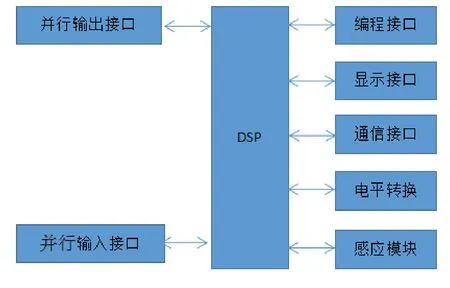
圖2 無線通信控制模塊結構示意圖
智能設備身上含有各種類型的傳感器,包括距離傳感器、溫度傳感器、速度傳感器、聲音傳感器和圖像傳感器,這使得智能設備對周圍環境有很好的感知能力,并且通過傳感器感知到的數據能形成一定的自主決策。為了讓控制器對智能設備的控制更加高效,必須優化無線通信效率,除了可以通過增加網絡帶寬來提升數據吞吐率以外,還需要對軟件模塊進行模塊化設計,讓各個功能解耦合,并采用并行的數據傳輸方式來與智能設備本體進行數據交互。
并行輸入接口主要是智能設備身上的各類傳感器,接收傳感器上傳的各類數據,數據類型主要包括以下幾類:
①紅外傳感器和超聲波傳感器接收的距離信息;
②溫度傳感器接收的溫度信息;
③速度傳感器接收的實時速度信息;
④圖像傳感器接收的圖像信息;
⑤聲音傳感器接收的音頻信息;
⑥驅動電機的狀態信息;
⑦無線控制模塊的通信報文。
并行輸出接口主要是輸出控制命令報文信息,主要包括以下幾類:
①電機控制命令;
②智能設備各種狀態信息。
編程接口主要是指控制軟件與DSP模塊之間銜接的約定,為了更好地對智能設備系統進行操控,需要事先對系統的各種功能進行合理的劃分,降低各部門的相互依賴,弱化各模塊之間的耦合性,這樣才能有效提高整個系統的維護性和拓展性。
顯示接口主要用于調試時監視系統各部分的狀態信息。
通信接口主要包含串行接口和RS232通信接口,并且預留可擴展接口。
4 無線通信模塊設計
近程無線通信技術主要有藍牙技術、Wi-Fi技術、IrDA技術和低功率短距離無線通信技術等。借助無線通信技術,智能設備可以更加自如地完成復雜的功能。藍牙技術、Wi-Fi技術和IrDA技術,這些技術都相當比較成熟,在一些小型設備上運用是非常合適的,但是每個技術也有各自的局限性,如IrDA技術需要兩個通訊設備對準,之間不能有障礙物遮擋,并且節點個數不能拓展;藍牙技術和Wi-Fi技術主要受限于傳輸距離,當距離稍微遠一點,信號就會明顯變弱。
為了使得智能設備擴展其移動區域,使得最長通信距離能達到300m左右,很多有經驗的設計者更傾向于選擇傳輸距離更遠的低功率短距離無線通信技術作為無線智能設備控制模塊的通信方式,低功率短距離無線通信技術一般選擇DSP作為射頻收發芯片,為了構建完整的無線通信模塊,還需要微控制器來配合使用。通信模塊與其他設備主要通過數據傳輸協議進行數據交互,同時為了數據的安全,還需要使用必要的加密協議,對于設計者來說,不需要對通信原理進行深入的研究,只要按照協議格式設計不同的功能操控報文,同時實現數據的快速傳輸。
智能設備控制模塊通過PC機發出的指令以及傳感器對周圍環境獲取到的感知數據形成判斷決策,來計算智能設備的位置目標的路徑,然后調用實現該動作的代碼,生成對智能設備的速度控制命令。計算機通過串口將這些命令發送給無線通信模塊。無線通信模塊中的發射器對智能設備的控制指令進行編碼形成數據包并將數據包發射出去。無線接收模塊一般安置在智能設備本體上,當有無線數據發送過來的時候,智能設備能完整的接收下來并進行解碼,生成對應的智能設備控制報文,智能設備根據操控報文,調節輸出的PWM脈沖,不同的PWM脈沖可以決定不同的速度和方向,大大提升了智能設備操控的靈活性。
5 結語
如今,DSP在智能控制領域運用越來越廣泛,這主要得益于它能實現很多復雜的控制算法和功能,并且完成高精度的控制。智能設備控制模塊作為控制系統里的核心部件,決定著智能設備行為的智能化程度,現在大部分的智能設備控制系統都是基于DSP機構設計的,在整體結構中,DSP是整個硬件電路的核心,除此之外,還包括存儲器電路和信號隔離電路,為了完成無線操控,還要完成無線通信模塊的電路設計,主要包括發射電路和接收電路,同時約定通信協議,整個設計需要通過C語言進行軟件設計,并且部署到硬件平臺。
隨著智能設備越來越智能化,其攜帶的傳感器也會越來越多,智能設備對周圍的環境感知能力也會相應地增強,同時也會要求控制模塊與智能設備本體的傳輸延時越來越小,這就會對通信模塊和信息處理模塊提出更高的設計要求,相信在不遠的將來,智能設備發展會到達一個新的高度,滿足各行業各場景的全方位需求。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
中國特種設備安全(2022年6期)2022-09-20 02:52:28
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:26:08
中國科技論壇(2017年7期)2017-07-25 08:49:53
工業設計(2016年12期)2016-04-16 02:52:00
消費者報道(2014年7期)2014-07-31 11:23:57
