基于虛擬電容的直流輸電系統連續換相失敗抑制研究
2022-07-10 14:57:46陳鋒元韓昆侖宋海根楊東睿
科學技術與工程 2022年16期
陳鋒元, 韓昆侖, 宋海根, 楊東睿
(廣西大學電氣工程學院, 南寧 530004)
由于各地區經濟發展和一次能源供應的不平衡性,使得“荷源分離”現象愈加明顯。高壓直流輸電系統(line-commutated-converter based high voltage direct current,LCC-HVDC)因具有長距離、大容量等輸電優勢得到快速發展[1]。受晶閘管導通特性及控制系統響應延遲等因素的影響,直流系統的首次換相失敗一般難以避免。首次換相失敗發生后,如果采取適當的措施,則可有效抑制后續換相失敗的發生,使系統恢復到穩定,不會危害系統的安全穩定運行[2];否則可能會出現單次換相失敗發展為連續換相失敗的情況。連續換相失敗對直流系統的危害極大,會導致直流閉鎖、傳輸功率中斷,對交流系統的安全穩定運行也造成極大威脅。
針對單次換相失敗的問題,中外學者已開展了大量研究。文獻[3-7]分析了換相失敗的主要影響因素,主要有換流母線電壓、換流變壓器變比、直流電流、換相電抗、超前觸發角、不對稱故障時換相電壓過零點相位移和交流系統的頻譜特性以及低次諧波和負序諧波等,并根據這些因素提出了抑制換相失敗的相關措施。文獻[8-9]提出了換相電壓時間面積的概念,并將其用于換相失敗的理論分析。在判別換相失敗時考慮了直流電流的波動,但該方法并沒有深入研究對換相失敗的抑制和后續恢復問題。文獻[10]分析了換相電流時間判據,并基于此判據對換相失敗預防控制作出改進,增加了換相失敗預防控制的靈敏性,解決了在某些故障情況下換相失敗預防控制在某些故障情況下存在啟動不及時的問題。文獻[11]分析了由直流分量與地磁諧波元件引起的失真是造成換相失敗的原因,并提出了一種基于故障限流器的故障限流策略。文獻[12-13]提出了綜合各相關電氣量的模糊控制策略,設計了一種自適應模糊控制方法來確定超前觸發角,并通過仿真進行驗證。
對于直流輸電系統連續換相失敗的問題,文獻[14]指出目前對抑制直流輸電連續換相失敗的研究大多是利用低壓限流器(voltage dependent current order limiter,VDCOL)來實現的,并分析了VDCOL抑制連續換相失敗的原理,但是其調節靈敏度低,在發生換相失敗后的響應較慢。為了在系統發生換相失敗時提高直流系統調節的靈敏度,文獻[15]提出了一種基于非線性動態VDCOL控制器設計方案,該方案可靈活調節VDCOL控制器的控制曲線,提高直流電流指令在系統故障期間的響應速度,解決了文獻[14]存在的缺陷。文獻[16]提出了一種基于虛擬電感的VDCOL改進控制策略用于抑制直流輸電的連續換相失敗,可有效抑制交流側單相故障造成的連續換相失敗,但該策略對三相故障引發的換相失敗效果不明顯。文獻[17]提出了一種基于最大短路電流限制的連續換相失敗抑制方法,該方法可有效抑制交流側單相接地嚴重故障引起的連續換相失敗,但該方法需要以首次換相失敗信息為觸發信號,只有在換相失敗發生后才能發揮作用,不利于對故障的預判。文獻[18]提出了一種利用直流電流變化率判斷換相失敗的方法。文獻[19-20]提出了一種變熄弧角控制策略,該策略通過逆變側定熄弧角控制跟蹤定電流控制實現控制模式提前平穩切換,但沒有深入分析故障嚴重程度對該控制策略的具體影響。
基于上述問題,提出了一種基于虛擬電容的直流輸電系統連續換相失敗抑制方法,引入了虛擬電容的概念,將其作為直流側電壓變化率的載體,利用虛擬電容來感應直流電壓的變化,與VDCOL控制環節共同作用,限制故障期間直流電流指令值的上升,增大換相裕度,達到抑制直流輸電系統連續換相失敗的目的。采用直流輸電系統電磁暫態算例驗證所提方法。以期為換相失敗研究提供科學依據。
1 換相失敗機理分析
高壓直流輸電系統由于其采用晶閘管作為換流器的核心部件,其換相過程需要由交流系統提供換相電壓。當同一橋臂組內相鄰的兩個換流閥換相結束后,剛關斷的閥需要承受一段時間的反向電壓才能恢復阻斷能力,若換相過程未結束或換相過程雖已結束但閥阻斷能力尚未完全恢復的情況下閥電壓變為正向,被換相的閥將向剛關斷的閥倒換相,這一過程稱為換相失敗[14]。由于高壓直流輸電系統中晶閘管的特性,換相失敗對于逆變側來說更為普遍,逆變側的交流系統故障是引起換相失敗發生的主要原因[21]。
以逆變器閥1向閥3換相為例對高壓直流輸電系統換相過程進行分析。逆變器結構如圖1所示。

VT1~VT6為晶閘管1~6的編號;Ud、Id為整流側直流系統的電壓電流;ua、ub、uc分別為逆變側交流系統的三相電壓;ia、ib、ic分別為逆變側交流系統的三相電流;Xar、Xbr、Xcr為分別為逆變側換流變壓器的三相電抗
根據基爾霍夫電壓定律可得回路方程為
(1)
式(1)中:ua、ub為逆變側交流系統的相電壓;ia、ib為逆變側交流系統的相電流;Ra、Rb和Xar、Xbr分別為逆變側換流變壓器的電阻和電抗;ω為角頻率;t為時間。
由于在大容量變壓器中,其電抗遠大于電阻,故電阻可忽略,且Xar=Xbr=Xr,其中Xr為換相電抗,則式(1)可簡化為
(2)
對式(2)進行積分可得
(3)
式(3)中:α、μ分別為觸發延遲角、換相角。
在換相過程中,ia+ib=ic,ib(α)=0,ib(α+μ)=id,γ=π-(α+μ),則解方程可得

(4)
式(4)中:γ為熄弧角;id為直流電流;uab為逆變側交流系統相間電壓。
換相失敗發生的根本原因是在于熄弧角γ小于極限熄弧角γmin,造成換相裕度不足,使晶閘管沒有充足的關斷時間。因此,抑制換相失敗最直接有效的方法就是在故障發生造成換相失敗發生時適當增大熄弧角,保證換相過程中換流閥有充足的關斷時間,促進換相完成。
在實際系統中,直流系統發生連續換相失敗時,將會造成直流電壓大幅下降,并且熄弧角的變化趨勢與直流電壓具有同步性,基于此,對直流電壓與換相裕度的關聯展開詳細研究。研究發現如果故障發生后,電壓下降因素不能及時消除會導致系統發生連續換相失敗,并通過仿真實驗驗證,如圖2所示。
由圖2可知,將故障期間及故障后的恢復過程分為5個階段:①直流電壓下降導致熄弧角降為零,發生換相失敗;②直流電壓再次降為零,下降因素仍未消除,相應的熄弧角也再次降為零,發生連續換相失敗;③直流電壓下降趨勢明顯,相應區間的熄弧角再次下降為零,發生三次連續換相失敗;④直流電壓仍有微小下降趨勢,導致熄弧角再次下降,使得換相裕度大大縮小,增大了再次發生換相失敗的概率;⑤直流電壓呈持續上升趨勢,電壓下降因素已消除,熄弧角也相應地恢復到正常值,不再發生換相失敗。分析可知,導致直流電壓下降的因素是導致直流系統發生連續換相失敗的主要原因,因此,及時采取措施消除電壓下降因素是抑制連續換相失敗的有效方法。

①~⑤為故障期間及故障后的恢復過程的5個階段
2 虛擬電容控制方法
傳統的低壓限流環節對直流輸電系統連續換相失敗有一定的抑制作用,但當直流電壓波動劇烈時,VDCOL則無法及時做出響應,可能會使直流輸電系統由單次換相失敗發展為連續換相失敗,嚴重威脅直流輸電系統的安全穩定運行。基于此,提出了一種基于虛擬電容的直流輸電系統連續換相失敗的抑制方法,結合虛擬電容與低壓限流控制環節共同作用,達到抑制直流輸電系統連續換相失敗的目的。
2.1 直流輸電系統直流控制環節
低壓限流控制器可在故障期間幫助維持交流電壓穩定、降低直流功率的同時減少對交流系統無功的需求,減小換相失敗發生的概率。目前,對于直流輸電連續換相失敗的主要應對策略是利用VDCOL。圖3為低壓限流器特性曲線。
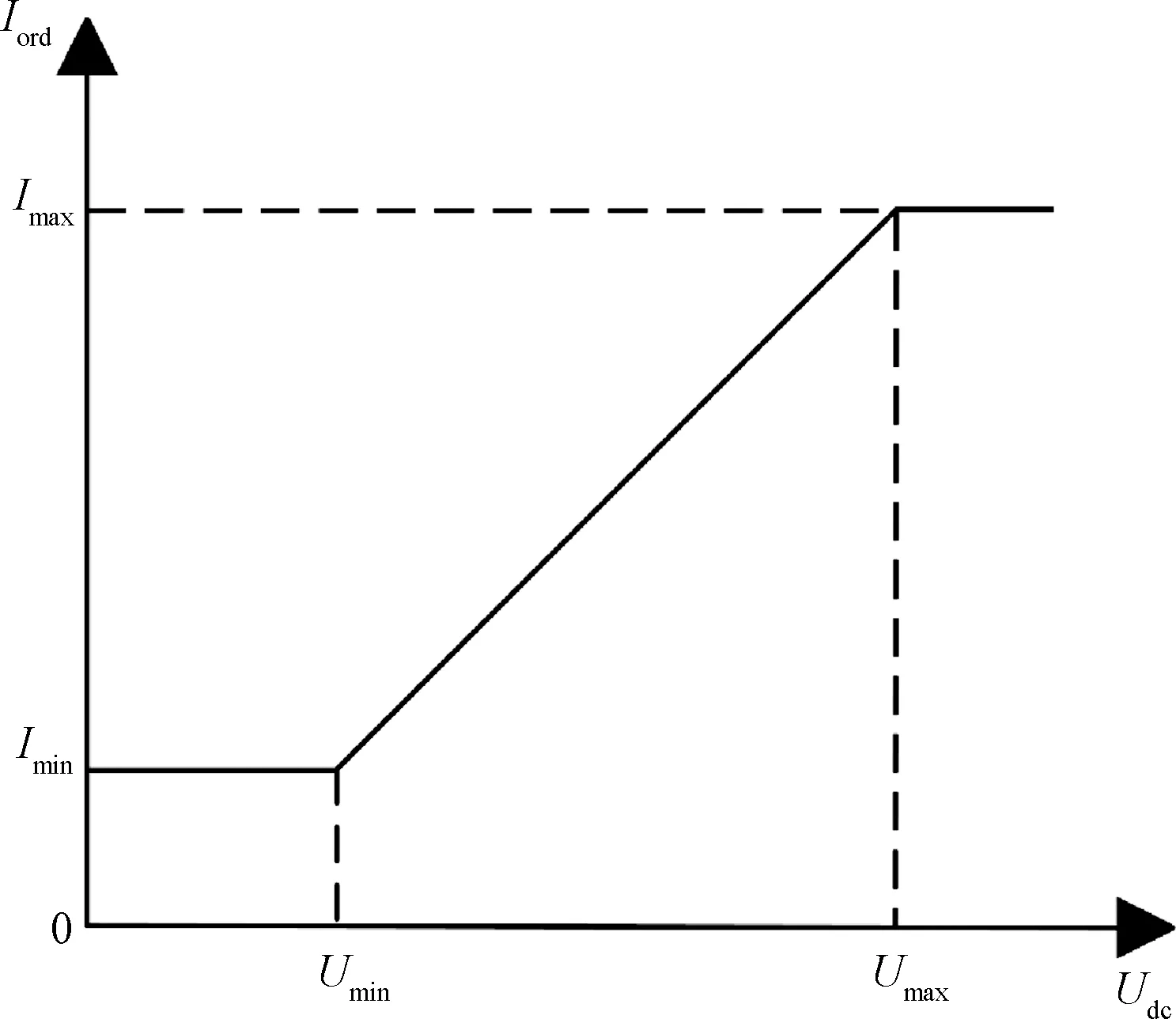
Imax、Imin、Umax、Umin分別為低壓限流器中的最大、最小電流及電壓;Udc為低壓限流器的啟動電壓;Iord為低壓限流器輸出的電流指令值
Udc和Iord之間關系可用函數I=f(U)來表示,可表示為
Iord=f(U)
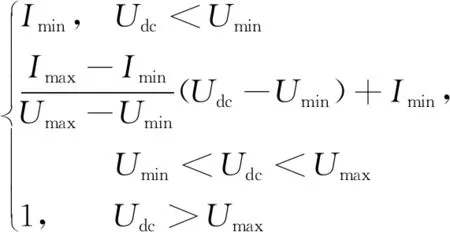
(5)
2.2 抑制高壓直流輸電系統連續換相失敗的控制策略
2.2.1 基于虛擬電容的控制策略
根據電容的電氣特性,構造的虛擬電容控制環節的基本結構如圖4所示,采用一階微分環節來模擬虛擬電容的測量過程,采用一階慣性環節用來模擬電壓、電流的測量環節。慣性時間常數T反映測量設備的響應速度,增益G將電壓和電流實際值變換為無量綱的標幺值。
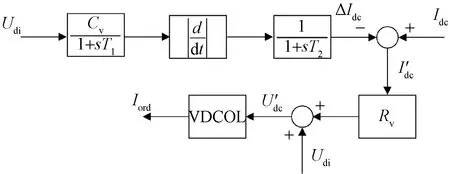
Udi為直流電壓;Cv為虛擬電容值;Idc為直流電流;T1、T2為慣性時間常數;ΔIdc為直流電壓作用到虛擬電容上產生的電流差;Rv為補償電阻;U′dc為低壓限流控制環節的啟動電壓;Iord為經過限流控制環節輸出的電流指令值;I′dc=Idc-ΔIdc
由圖4可知,直流電壓作用到虛擬電容上會產生電流差ΔIdc,可表示為
(6)
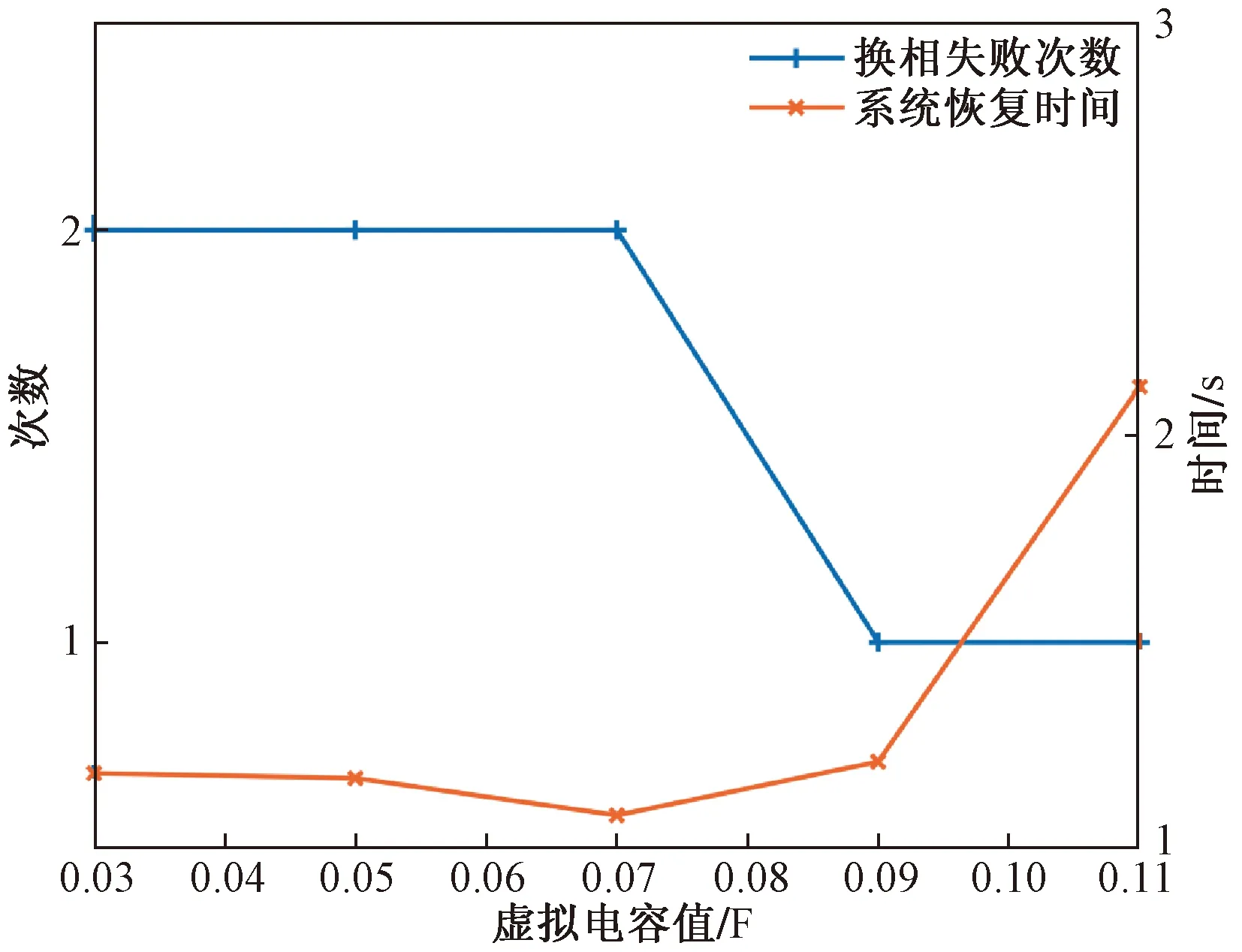
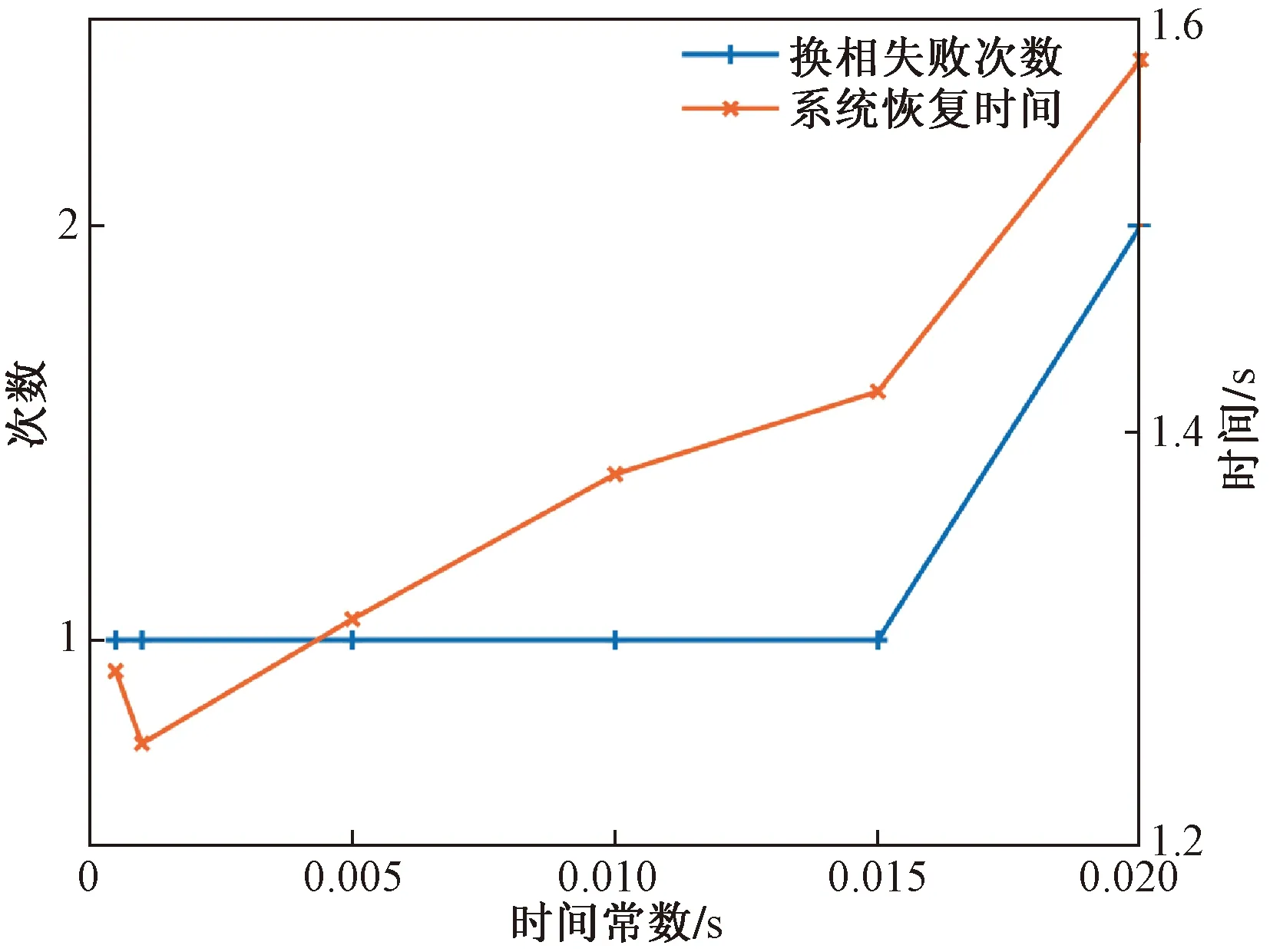
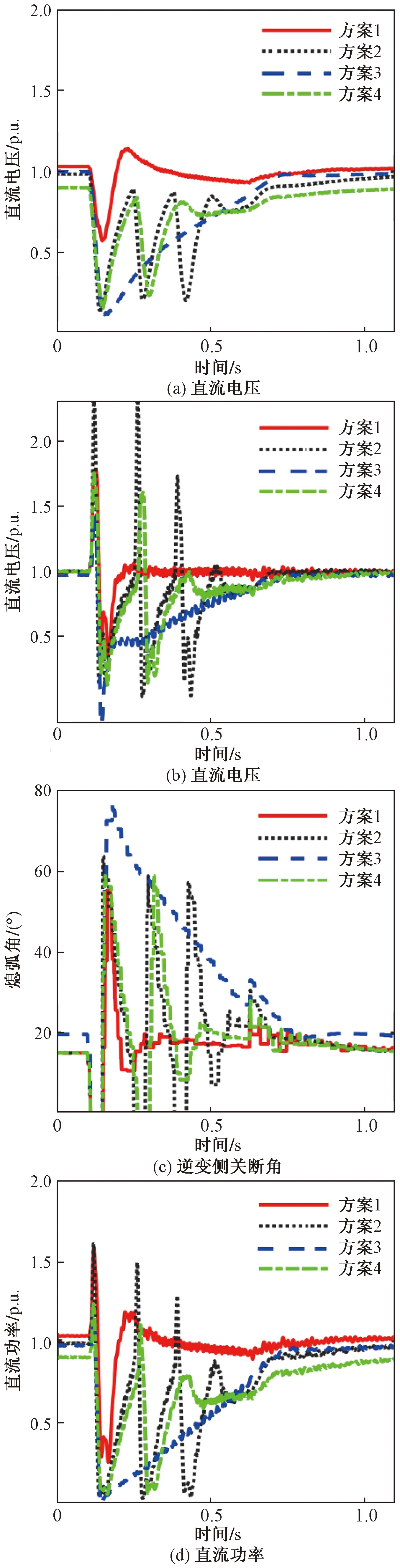
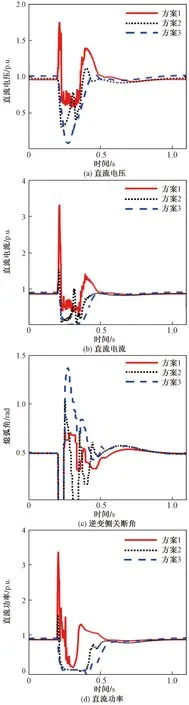
將得到的ΔIdc與Idc做差得到I′dc,然后通過補償電阻與直流電壓Udi共同作為VDCOL控制環節的啟動電壓,達到減小電流指令值來促進換相和故障后的系統恢復的目的。在故障后的恢復期間,為了保證I′dc (7) I′dc=Idc-ΔIdc (8) 則可得低壓限流控制環節的啟動電壓U′dc,其表達式為 U′dc=Udi+I′dcRv (9) 式(9)中:Rv為補償電阻。 引入虛擬電容后的低壓限流控制環節輸出的電流指令值變為 Iord=f(U) (10) 由式(7)和式(8)可知,在故障期間,I′dc恒小于Idc,則U′dc恒小于Udc,與傳統的低壓限流控制環節相比,故障后VDCOL輸出的電流指令值將減小,可增大換相裕度,促進換相成功。 2.2.2 改進的基于虛擬電容的電壓補償法 虛擬電容策略主要是根據直流電壓的變化來降低電流指令值,進而達到增大換相裕度的目的。但在故障期間及系統恢復過程中的電壓恢復較緩慢,影響故障發生后的系統整體恢復。實際直流系統中發生換相失敗的主要因素是由于交流系統發生短路故障,使得直流電壓下降造成直流系統換相裕度變小,不足以完成正常換相。基于此,對虛擬電容控制策略做出了改進,提出了一種電壓直接補償策略,利用電容特性,感應直流電壓的變化,在故障期間對直流電壓進行補償,抑制直流電壓的下降趨勢,消除故障后電壓下降因素,達到抑制直流輸電系統連續換相失敗的目的。直接電壓補償法的原理框圖如圖5所示。 圖5 直接電壓補償法原理圖 如圖5所示,虛擬電容環節感應直流電壓的變化,如式(7)所示把直流電壓變化量轉化為電流差ΔIdc,然后作用到補償電阻Rv形成電壓差ΔUdc,則可得補償后的直流電壓,可表示為 U′dc=Udi+ΔUdc (11) 由式(11)可知,補償后的電壓U′dc在故障期間恒大于原始電壓Udi,當交流系統發生故障導致直流電壓下降時,所提方法可快速有效地進行補償,消除故障后直流電壓下降的因素,從根本上解決故障后直流輸電系統連續換相失敗的問題。 虛擬電容控制環節的相關參數的不同取值對控制系統的響應速度及抑制作用不同,不合適的取值會對系統的穩定運行及故障后的恢復造成不利影響。因此,選取合適的參數對控制方法的效果至關重要。 由于參數整定值難以通過理論推導得出,通過對比仿真實驗得出不同參數下對故障期間的抑制效果及故障后的恢復特性,利用控制變量法進行對比實驗,選取最佳參數值。由圖4可知,所提方法的相關參數主要有虛擬電容值Cv和ΔIdc的一階慣性濾波時間常數T2。仿真實驗選取最嚴重的故障即三相故障情況下,保證實驗結果不失一般性。首先選取T2為標準系統的默認值0.05 s,分析不同的虛擬電容值Cv下的抑制效果及恢復特性,其仿真實驗結果如圖6所示。 由圖6仿真結果可知,Cv取值過小,系統不能穩定運行,對連續換相失敗的抑制效果不好;Cv取值過大,對故障后系統的恢復不利。在Cv=0.09 F時,其換相失敗次數為1,并且系統的恢復時間值也相對較小。因此,虛擬電容的最佳取值為Cv=0.09 F。 圖6 不同虛擬電容值的抑制效果和恢復特性 根據Cv=0.09 F時來仿真分析不同的一階慣性濾波時間常數對故障期間的抑制效果及故障后的恢復特性。其實驗結果如圖7所示。 由圖7可知,T2取值過小,直流功率波動程度較劇烈,不利于系統的穩定運行;T2取值過大,不利于系統故障后的恢復。由上述分析可知,虛擬電容環節的最佳參數取值為:Cv=0.09 F,T2=0.001 s。利用同樣的方法可得改進后的參數整定值,不再詳細贅述。改進后的虛擬電容控制策略的參數值整定值為:Cv=0.3 F,T2=0.02 s。 圖7 不同濾波時間常數的抑制效果和恢復特性 為驗證基于虛擬電容的直流輸電系統連續換相失敗的抑制方法的有效性,在PSCAD/EMTDC環境中搭建了如圖8所示的電磁暫態仿真模型,并基于此模型實現了所提控制方法。 E1為整流側交流系統電壓;E2為逆變側交流系統電壓;ULR和ULI為整流側和逆變側的母線電壓;Ldr、Ldi和Rdr、Rdi分別為輸電線路整流側、逆變側的等值電感和電阻;C為輸電線路的對地電容 仿真模型的參數如表1所示。其中控制系統中的補償電阻Rv取0.07 Ω,用于平衡在正常運行時,由于直流電壓的微小變化造成的直流功率降低。 表1 仿真模型參數 為驗證所提方法對抑制直流輸電系統連續換相失敗的有效性,采用對比分析的方法,通過PSCAD/EMTDC進行仿真驗證。在逆變側交流母線上設置不同類型的故障,故障接地方式選擇經電感接地,接地電感值的大小表示故障的嚴重程度,接地電感值越小表示故障點距交流母線越近,故障越嚴重。為了使所提方法得到充分的驗證,對4種方案進行分析對比。 方案1加入了所提改進的虛擬電容的電壓補償控制策略。 方案2CIGRE直流標準測試模型控制策略。 方案3加入了所提的虛擬電容的控制策略。 方案4加入了文獻[14]提出的虛擬電感控制策略。 為方便分析,以接地電感值L=0.4 H為典型在不同故障類型下對4種方案進行詳細分析。 3.2.1 單相故障 在逆變側交流母線上設置A相經電感接地故障,持續時間為0.5 s,接地電感L=0.4 H。4種方案的電氣量變化曲線如圖9所示。 由實驗結果(圖9)可知,在發生單相接地故障時,原始控制策略方案2的直流電壓及直流電流波動較大,出現3次下降到零的情況,熄弧角值也隨著電壓的下降發生相應的減小,導致換相裕度不足,發生3次換相失敗;基于虛擬電容的控制策略方案3通過感應直流電壓的變化,在故障期間降低了直流電流指令值增大了換相裕度,減弱了直流電壓和電流的波動程度,抑制了直流電壓的在故障后的下降趨勢,進而達到了抑制連續換相失敗的目的,但該方案中的各個電氣量在故障后恢復較緩慢,使得直流系統在故障后系統的恢復效果不好;加入了虛擬電感的控制策略方案4對連續換相失敗有一定的抑制效果,但通過實驗結果可知,總體的效果不如方案3;針對方案3在故障后系統恢復緩慢的問題,基于虛擬電容控制策略加以改進,改進后的方案1不再僅是依靠降低電流指令值來抑制連續換相失敗,而是利用電容的特性有效地檢測到直流電壓的變化,及時地對故障期間及故障后的系統直流電壓進行直接補償,從根本上消除電壓下降因素。從實驗結果(圖9)可以明顯看出,改進的虛擬電容策略方案1在各個方面都優于其他3種方案,可有效抑制直流系統連續換相失敗,并可加速故障后系統的恢復。 圖9 單相故障時直流電氣特征量變化曲線 3.2.2 三相故障 把逆變側交流母線的故障類型設置為三相故障,其他參數不變。其仿真結果如圖10所示。 由實驗結果(圖10)可知,在三相故障情況下,方案1和方案3均對連續換相失敗有一定的抑制效果,原始控制策略方案2直流功率波動幅度較大,并且直流功率兩次降為零,直流電壓和直流電流的波動程度較大。而方案1和方案3直流功率波動幅度較小,直流電壓和直流電流的波動程度相對較小,在發生故障時對整個輸電系統的影響相對較小。 圖10 三相故障時直流電氣特征量變化曲線 為充分驗證所提方法的有效性,將所提控制方法基于某直流系統實際參數搭建的電磁暫態模型進行仿真驗證,如圖11所示。 如圖11所示,基于實際參數搭建了直流輸電雙極模型,利用此模型實現了所提控制方法。 圖11 基于實際參數的直流系統結構簡圖 仿真參數如表2所示。在逆變側交流母線上設置不同類型的短路故障,考慮到實際系統中故障持續時間一般較短,設置故障持續時間為0.2 s。 表2 實際參數 圖12、圖13中方案1為改進的虛擬電容控制方法,方案2為原直流系統的控制方方法,方案3為基于虛擬電容的控制方法。 由圖12和圖13可知,當逆變側交流系統發生單相短路故障時,原始系統方案2的熄弧角出現三次下降,皆小于極限熄弧角值,系統將會發生三次換相失敗,而所提的基于虛擬電容的控制策略方案3及其改進控制方法的方案1熄弧角皆僅出現一次下降到小于極限熄弧角的狀態;其中,方案1的直流電壓、直流電流及直流功率的波動程度都相對較小,故障后系統的恢復也相對較快。當逆變側交流系統發生三相短路故障時,方案3也可有效抑制直流系統連續換相失敗,引入方案1控制方法的直流系統的各電氣特征量的恢復速度相比方案2和方案3都有顯著的優勢。表明所提的基于虛擬電容的控制方法可有效抑制直流系統連續換相失敗,并可加速故障后系統的恢復。 圖12 單相故障時直流電氣特征量變化曲線 圖13 三相故障時直流電氣特征量變化曲線 結合在直流輸電系統中發生故障時直流電壓和直流電流的變化特性,提出了一種基于虛擬電容的連續換相失敗抑制方法。理論分析和實驗結果表明,所提的基于虛擬電容的控制方法能夠有效抑制直流系統連續換相失敗,并加速了故障后系統的恢復。得出如下結論。 (1)所提方法引入虛擬電容的概念,通過虛擬電容環節直接并準確感應故障時直流電壓的變化,提高了VDCOL感應故障的靈敏性,可提前降低VDCOL的電流指令值,進而達到抑制直流系統連續換相失敗的目的;基于虛擬電容控制策略基礎的改進策略可及時對故障期間的直流電壓進行補償,消除直流電壓下降因素,增大了換相裕度,可有效抑制直流系統連續換相失敗,并加速了故障后系統的恢復。 (2)該策略是在直流控制系統中實現的,無需在實際工程應用中加入實際電氣元件,可在很大程度上節約成本,并且不需考慮實際電氣元件的電氣特性,易于實現。 (3)能有效抑制交流側單相短路故障及三相短路故障引起的直流系統連續換相失敗,對直流系統的穩定及恢復也有良好的效果。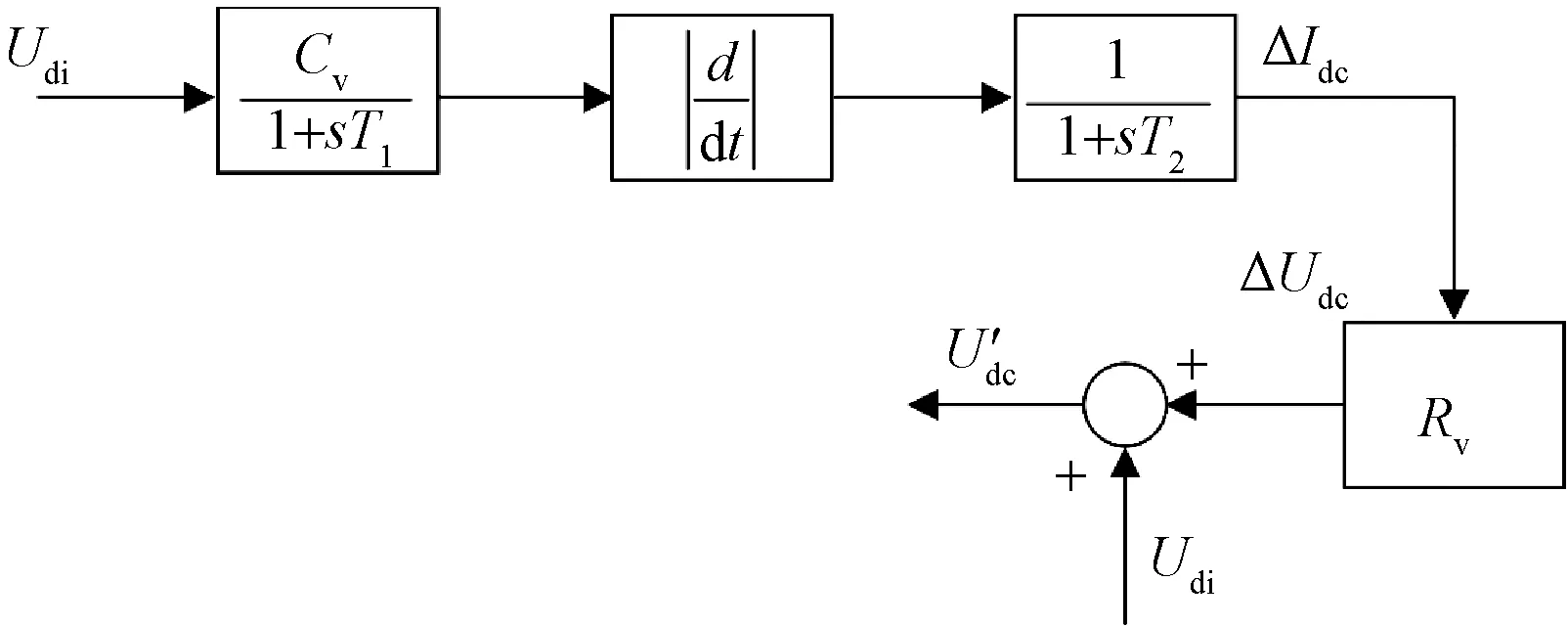
2.3 虛擬電容控制環節的參數整定
3 方案對比分析
3.1 仿真模型


3.2 仿真結果分析

4 基于實際參數的仿真驗證
4.1 仿真模型


4.2 仿真結果分析

5 結論
猜你喜歡
科教新報(2022年12期)2022-05-23 06:34:16
今日農業(2021年14期)2021-10-14 08:35:28
能源工程(2020年6期)2021-01-26 00:55:22
海峽姐妹(2020年8期)2020-08-25 09:30:18
汽車維修與保養(2019年7期)2020-01-06 03:30:42
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
汽車維護與修理(2016年10期)2016-07-10 08:17:41
通信電源技術(2016年1期)2016-04-16 04:57:26
汽車維修與保養(2015年6期)2015-04-17 03:31:50
