選煤廠智能化巡檢機器人結構設計
2022-07-08 01:13:02曹學磊
機械管理開發 2022年4期
關鍵詞:智能
曹學磊
(晉能控股煤業集團精煤分公司, 山西 大同 037003)
引言
近年來,隨著經濟的快速發展,我國對能源的需求越來越大,煤炭不僅是我國重要的化石燃料,同樣也是國內各行各業的工業加工原料,煤炭的開采對于我國經濟的快速發展具有至關重要的作用。當前,隨著快速掘進技術和掘支錨一體化裝備研發取得新的進展,煤炭的開采過程變得更加智能高效,通過開采得到的煤炭必須要經過選煤廠進行篩選,才能夠得到合理的利用。因此,選煤廠的主要作用就是將煤礦礦物中的某些雜質進行初步去除,并根據煤炭的自身性質分選為不同規格的產品。選煤廠自身環境比較復雜,車間內部布置有各種電氣設備和選煤裝備,常常伴有粉塵和CO2、SO2等氣體。此外,在煤炭處理的過程中也有可能會釋放出部分有毒有害氣體,如果不能進行有效的巡檢和監管,將帶來安全隱患,稍有不慎就有可能會引發爆炸事故[1]。
根據選煤廠的相關制度規定,巡回檢查要實時掌握選煤廠各個裝備的運行情況,包括內部的噪聲以及關鍵結構件的運動情況,有利于及時發現設備的運行異常,將可能潛在的故障進行排除,有效避免事故發生。
為了預防以上的事故發生,目前在選煤廠都會派專人進行巡檢,采取人工巡檢、定點監控和軌道式巡檢等方式。傳統的選煤廠要求在車間的各個角落都安裝攝像頭,比如在選煤廠帶式輸送機的機頭位置、淺槽位置和快裝站等,由于采集的環境位置比較多,在上位機監控界面,需要有人時刻關注各個攝像頭的畫面變化,但是也會有疏忽的時候,從而導致事故發生。傳統的人工巡檢存在勞動強度大、實時性差、巡檢工作效率低、漏檢、誤檢等問題,甚至有很多巡檢工人消極怠工,導致巡檢效果較差,并且對某些緊急狀況報警延時加長。隨著智能化時代的來臨,通過機器人代替人工進行巡檢的設想已經應用在國內的不同行業。為此,本文提出了一種智能巡檢機器人,代替人工完成選煤廠的智能化巡檢,可有效避免巡檢過程中出現的各種安全隱患,有利于保證巡檢工人的身體健康。
1 智能巡檢機器人結構組成
由于選煤廠的環境比較惡劣,在實際巡檢過程中地面并不平整,有時候會出現比較大的傾角,機器人可活動的空間有限,為了能夠收集到足夠多的數據,機器人必須要能平穩運行,因此,機器人的結構顯得尤為重要,需要滿足機器人的爬坡度要求、質量要求等[2]。將機器人布置在選煤廠車間內,通過實時捕捉現場的圖片信息經過處理和分析,最終實現對車間內的巡檢。智能巡檢機器人技術要求參數,如表1 所示。
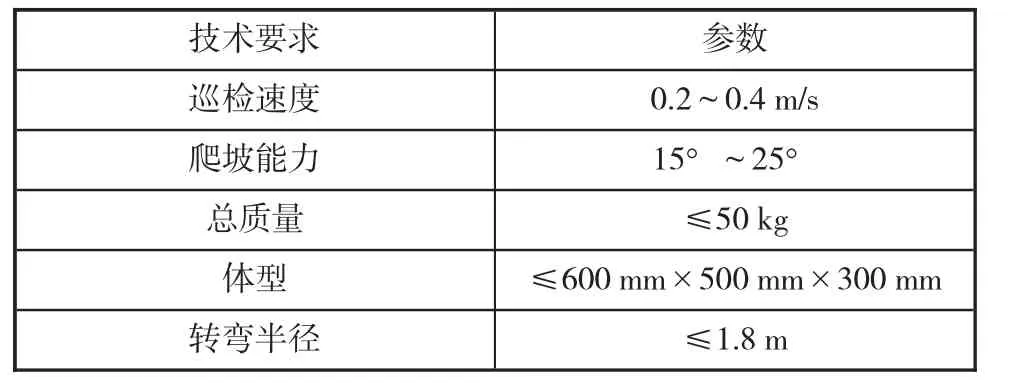
表1 巡檢機器人技術要求參數
結合以上的參數要求和結構設計要求,設計了一種采用軌道式和鋼絲繩牽引結合的一種行走機構,主要由驅動部分和本體部分兩部分組成,機器人的本體部分包括了供電系統、數據采集系統和定位系統,其中,數據采集系統主要包括氣體傳感器、聲音傳感器和紅外熱像儀等。智能巡檢機器人系統組成,如下頁圖1 所示。
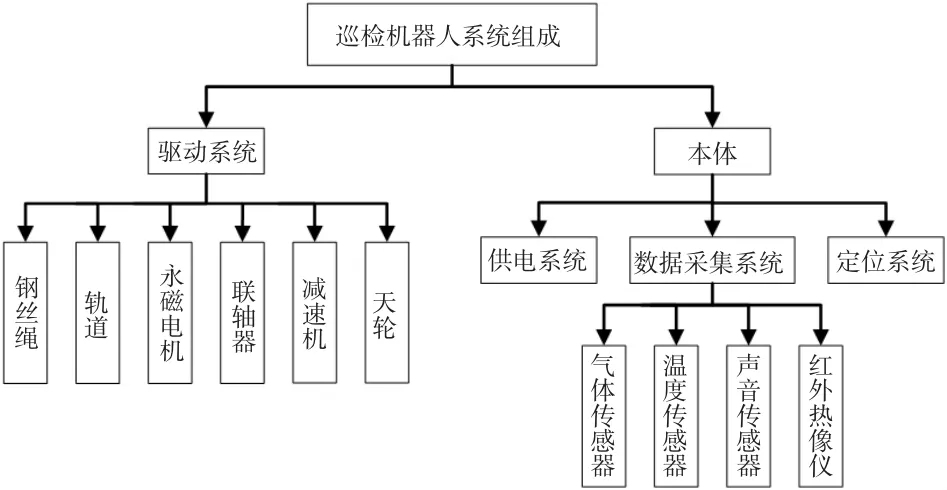
圖1 巡檢機器人系統組成圖
2 智能巡檢機器人結構設計
巡檢機器人主體結構主要由驅動部分、導向部分、支撐部分和輔助支撐部分組成,通過內部的蓄電池提供的電能驅動驅動輪轉動,同時卡扣在軌道上,通過驅動輪與軌道之間的摩擦力向前運動[3]。驅動輪、支撐輪和導向輪位于軌道兩側對稱布置。為了防止機器人在軌道兩側左右擺動,在設計時需要設計夾緊機構,夾緊機構主要采用多輪緊箍結構,實現對軌道的抱緊和夾持,有利于提供足夠大的摩擦力,實現平穩運行。通過布置于上下夾緊機構的彈簧進行調節,自動調整夾緊力,保證軌道之間的貼合處于一個正常的范圍之內,避免造成夾緊力過大或過小而無法正常平穩運行。在機器人本體上方安裝有四個對稱布置的傳感器,用于對機器人本體在軌道上的位置進行實時檢測和定位,在驅動輪處安裝有旋轉編碼器,用來檢測機器人的運行速度。選煤廠智能巡檢機器人本體結構組成圖,如圖2 所示。

圖2 巡檢機器人本體結構組成圖
機器人本體需要搭載到一個固定的支撐位置上,才能夠實現平穩運行,因此,在選煤廠車間內部需要架設一定數量的軌道,其中的軌道采用的是8號工字鋼,高度為80 mm、寬度為50 mm,腹板的厚度為5 mm,單根軌道的長度一般是采用標準的長度為6 m,兩根軌道之間的連接采用吊耳,并通過螺栓進行裝配,將軌道吊裝在車間房梁上,機器人本體卡緊于軌道上,機器人本體可以在軌道上自由行走,完成對選煤廠的車間巡檢,有效避免空間占用,合理利用了車間頂部的空間。相比于目前國內選煤廠使用的定點巡檢裝置,采用移動式巡檢,巡檢效果更好,可以實時檢測選煤廠車間設備的運行狀況,及時發現事故隱患。
巡檢機器人的本體行走機構主要包括了永磁電動機、減速器、聯軸器等,本體的重量可以由軌道自身進行承載,牽引系統通過車間內部的供電系統進行供電,牽引本體沿著軌道在車間內進行全方位巡檢,不需要頻繁充電,功耗更小,克服了續航的難題。
3 智能巡檢機器人功能模塊設計
智能巡檢機器人通過采集選煤廠車間內的信號進行初步分析和過濾,因此,數據的采集是實現對選煤廠實時巡檢的關鍵。巡檢機器人本體上搭載了多種智能傳感器,如聲音傳感器、溫度傳感器、煙霧傳感器、CO 傳感器和CO2傳感器等多種傳感器,可以分別對周圍環境中的參數進行實時捕捉,通過內部嵌入的單片機進行處理和分析,與標準值進行對比,發現環境參數的異常,立即報警,有效避免了事故發生[4]。巡檢機器人本體功能采集模塊設計原理圖,如圖3 所示。
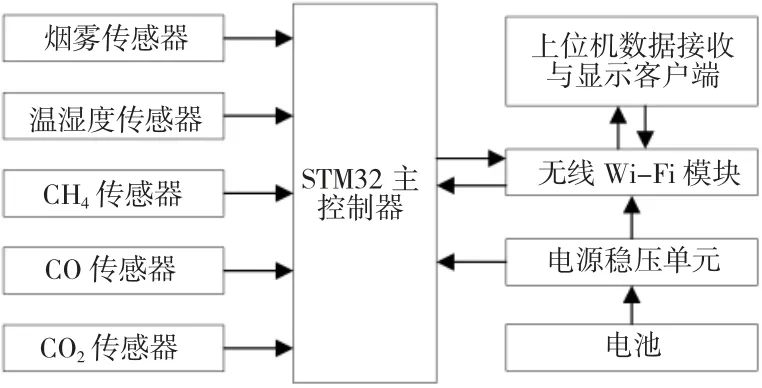
圖3 巡檢機器人本體功能采集模塊設計原理圖
4 現場應用實驗與效果
通過在車間內布置和架設軌道,并將智能巡檢機器人安裝于軌道上,通過現場模擬運行,可以看出:采用本套智能巡檢機器人可以代替傳統的人工巡檢,完成對選煤廠的智能巡檢,采集到比較清晰的圖像信息。相比于傳統的定點巡檢而言,采用智能巡檢機器人實現了移動巡檢,可以按照需要架設在選煤廠車間內部,布置更加靈活多樣,巡檢的范圍更大,可以實現對某些狹小區域的巡檢,全天不間斷。此外,通過移動巡檢可以發現潛在的事故隱患,及時排除,避免事故的發生。選煤廠智能巡檢機器人實時巡檢圖,如圖4 所示。

圖4 選煤廠實時機器人巡檢上位機顯示圖
5 結語
為了解決選煤廠傳統的人工巡檢中存在的巡檢效率低、巡檢不到位、巡檢成本較高、工人勞動強度大等問題,通過前期對選煤廠車間進行初步的調研,本文設計了一種選煤廠智能化巡檢機器人,由支撐軌道系統和巡檢機器人本體兩部分組成,其中巡檢機器人本體包括驅動部分、數據采集部分、上位機監控部分等。經調試并現場應用,本次設計的巡檢機器人具有結構緊湊,體積小,成本較低等優點,可以代替人工和定點監控,完成對選煤廠車間人員和設備的巡檢,對環境參數的識別精度比較高,傳送到上位機的畫面比較清晰,故障報警及時,能夠滿足選煤廠的巡檢要求。
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44