遙感微納衛(wèi)星載荷平臺(tái)高精度標(biāo)定技術(shù)研究
2022-06-30 06:56:56崔陽(yáng)陳雪笛姚小松趙笙罡王文川王秋蘋(píng)馬慧李良成潘超王炳甲
南京航空航天大學(xué)學(xué)報(bào) 2022年3期
崔陽(yáng),陳雪笛,姚小松,趙笙罡,王文川,王秋蘋(píng),馬慧,李良成,潘超,王炳甲
(1.中國(guó)科學(xué)院微小衛(wèi)星創(chuàng)新研究院,上海 201210;2.清華大學(xué)精密儀器系,北京 100084)
近年來(lái),遙感微納衛(wèi)星憑借研制成本低、研制周期短、發(fā)射成本低和可快速組網(wǎng)等優(yōu)勢(shì)成為空間光學(xué)遙感的重要手段,從而受到各個(gè)應(yīng)用用戶(hù)和商業(yè)航天公司的青睞。對(duì)于遙感衛(wèi)星而言,光學(xué)相機(jī)圖像定位精度直接影響圖像質(zhì)量、高精度定量化。一般而言,衛(wèi)星在軌利用星敏感器實(shí)現(xiàn)空間指向確定,再利用星敏感器與光學(xué)載荷之間的安裝矩陣對(duì)光學(xué)載荷光軸指向進(jìn)行轉(zhuǎn)換和定位,這就對(duì)星敏感器與光學(xué)載荷之間安裝矩陣的標(biāo)定提出了一定的精度要求,如圖1 所示。衛(wèi)星發(fā)射前,在地面需要對(duì)星敏感器與光學(xué)載荷之間的安裝矩陣進(jìn)行標(biāo)定,標(biāo)定結(jié)果作為在軌確定光學(xué)載荷光軸指向的依據(jù),地面主要通過(guò)高精度經(jīng)緯儀、激光跟蹤儀等高精度測(cè)量設(shè)備對(duì)星敏感器和光學(xué)載荷安裝角度進(jìn)行檢測(cè)標(biāo)定,地面標(biāo)定精度一般為0.5″。但是衛(wèi)星在發(fā)射時(shí)主動(dòng)段力學(xué)負(fù)載較大,容易造成衛(wèi)星、星敏感器和光學(xué)載荷結(jié)構(gòu)發(fā)生一定的形變,相應(yīng)會(huì)對(duì)星敏感器和光學(xué)載荷焦距、光軸指向產(chǎn)生一定的影像。此外,地面標(biāo)定時(shí)衛(wèi)星、光學(xué)載荷受9.8×10-3N 重力影響,而衛(wèi)星在軌工作時(shí)處于空間微重力環(huán)境,衛(wèi)星、光學(xué)載荷結(jié)構(gòu)在軌會(huì)發(fā)生一定的形變;因此,衛(wèi)星發(fā)射前后星敏感器和光學(xué)載荷光軸指向會(huì)發(fā)生一定的變化,光學(xué)載荷焦距在軌也會(huì)發(fā)生一定的變化。因此有必要開(kāi)展遙感衛(wèi)星在軌標(biāo)定技術(shù)研究。
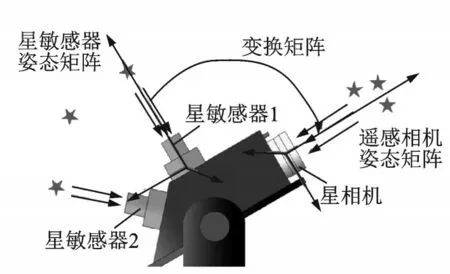
圖1 星敏感器和光學(xué)相機(jī)的空間指向Fig.1 Pointing of star sensor and optical camera
基于以上問(wèn)題,本文提出了一種光學(xué)遙感衛(wèi)星在軌標(biāo)定方法,即利用星敏感器和光學(xué)載荷在軌對(duì)恒星星點(diǎn)觀測(cè)的方式實(shí)現(xiàn)在軌指向標(biāo)定,以提高星敏感器和光學(xué)相機(jī)在軌空間指向精度。在軌標(biāo)定分為自標(biāo)定和互標(biāo)定,其中自標(biāo)定為利用光學(xué)載荷在軌觀星的方式對(duì)成像焦距、光軸指向進(jìn)行標(biāo)定。互標(biāo)定為利用光學(xué)載荷和星敏感器觀星的方式,對(duì)光學(xué)載荷和星敏感器安裝及指向信息在軌標(biāo)定,即利用光學(xué)載荷對(duì)星敏感器指向進(jìn)行標(biāo)定(光學(xué)載荷視場(chǎng)較小,指向精度較星敏感器高),以提升星敏感器在軌指向精度。
1 光學(xué)載荷在軌自標(biāo)定
1.1 光學(xué)載荷在軌自標(biāo)定原理
遙感衛(wèi)星采用在軌觀星的方式進(jìn)行載荷自標(biāo)定,觀星過(guò)程等效為經(jīng)典的小孔成像模型[1-2],如圖2所示。圖中f為載荷光學(xué)系統(tǒng)的焦距,π為載荷像平面,主點(diǎn)位于像平面的Os處,v?i為i星在星表中唯一的方向矢量,i星經(jīng)過(guò)相機(jī)成像后在恒星相機(jī)焦平面上的坐標(biāo)為(xi,yi),其所對(duì)應(yīng)成像測(cè)量方向向量為w?i。
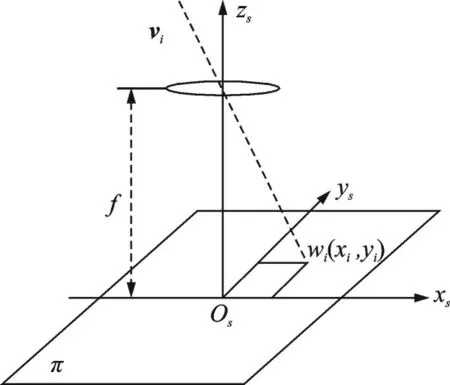
圖2 觀星小孔成像模型Fig.2 Typical configuration of remote sensing microsatellites
星在相機(jī)坐標(biāo)系中的矢量[3]為
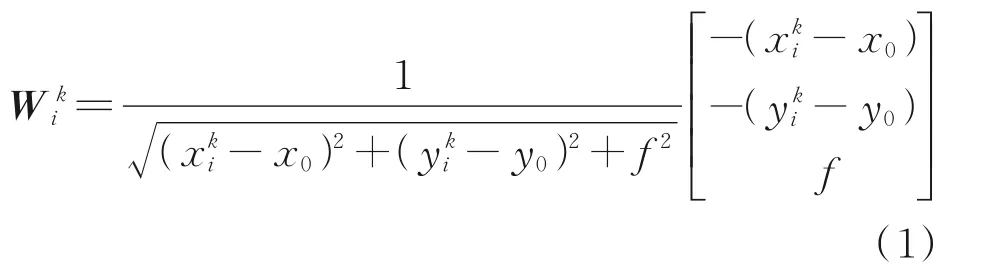
式中:(xik,yik)為第k幀星圖中的i星點(diǎn)坐標(biāo),(x0,y0)為主點(diǎn)坐標(biāo),f為望遠(yuǎn)鏡焦距,Wik為第k幀星圖中i星點(diǎn)在成像坐標(biāo)系中的矢量。
同時(shí)根據(jù)星圖識(shí)別的結(jié)果,可以得到星點(diǎn)在J2000 慣性系下的星矢量[4]為
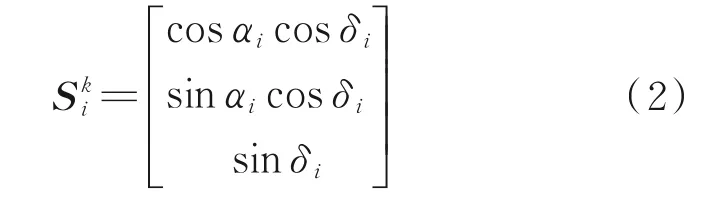
式中:(αi,δi)為i星點(diǎn)在J2000 慣性系下的赤緯度,根據(jù)光學(xué)遙感相機(jī)小孔成像原理可知,兩顆星之間的角距維持不變

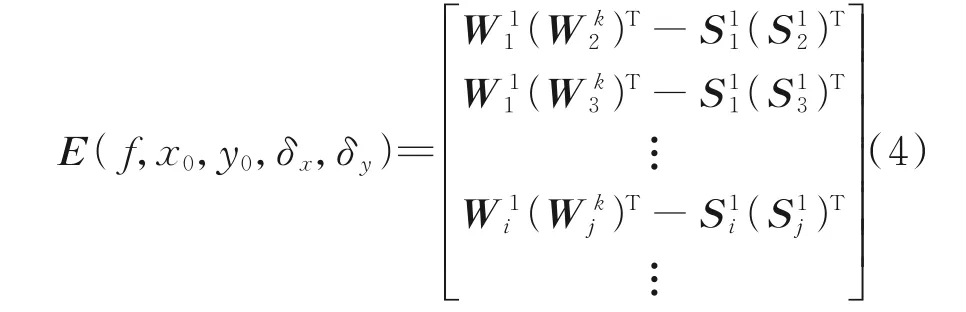
但由于星點(diǎn)位置隨機(jī)誤差、星敏感器誤差以及相機(jī)內(nèi)方參數(shù)誤差導(dǎo)致式(3)存在偏差,從而可以得到角距測(cè)量值與參考值之間的殘差,并獲得殘差矩陣[5],利用最小二乘法對(duì)相機(jī)內(nèi)方參數(shù)進(jìn)行標(biāo)定,如下式所示
式中(αx,δy)為星點(diǎn)坐標(biāo)由于畸變產(chǎn)生的坐標(biāo)偏移量。設(shè)計(jì)光學(xué)載荷在軌自標(biāo)定流程如圖3 所示。
1.2 自標(biāo)定誤差分析
根據(jù)自標(biāo)定流程,光學(xué)載荷自標(biāo)定誤差主要由星點(diǎn)位置坐標(biāo)提取隨機(jī)誤差、星表誤差、相機(jī)焦距以及光學(xué)畸變誤差組成[6]。
1.2.1 星點(diǎn)位置隨機(jī)誤差
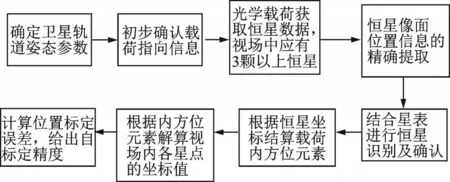
圖3 光學(xué)載荷自標(biāo)定流程Fig.3 Self calibration process of optical load
星點(diǎn)位置的隨機(jī)誤差主要由光學(xué)載荷探測(cè)器像面噪聲、星點(diǎn)提取算法等因素決定。在地面外場(chǎng)實(shí)驗(yàn)過(guò)程中,由于星光需要穿過(guò)大氣,因此將受到大氣視寧度的影響;同時(shí),在軌光學(xué)載荷一般焦距較長(zhǎng)、像素分辨率較高,相應(yīng)星像點(diǎn)會(huì)出現(xiàn)角秒級(jí)抖動(dòng),這對(duì)于亞角秒級(jí)的光學(xué)載荷而言是不容忽視的。
為了抑制星點(diǎn)位置的隨機(jī)誤差對(duì)自標(biāo)定精度的影響,可利用光學(xué)載荷對(duì)星空進(jìn)行連續(xù)多次成像,計(jì)算多幀星圖中對(duì)應(yīng)匹配的星點(diǎn)角距,將星點(diǎn)對(duì)角距平均值作為參考,利用最小二乘法對(duì)星點(diǎn)的位置坐標(biāo)進(jìn)行估計(jì)[7],并對(duì)多幀星圖星點(diǎn)位置進(jìn)行濾波,可有效抑制星點(diǎn)的隨機(jī)誤差以及外場(chǎng)實(shí)驗(yàn)過(guò)程中大氣視寧度的影響,實(shí)現(xiàn)星點(diǎn)高精度定心。
1.2.2 相機(jī)內(nèi)方參數(shù)誤差
(1)相機(jī)主點(diǎn)的誤差
由于相機(jī)初始給定的主點(diǎn)信息并非其真實(shí)主點(diǎn),假定(Δx0,Δy0)表示主點(diǎn)坐標(biāo)的誤差,那么星點(diǎn)在像面上的坐標(biāo)為
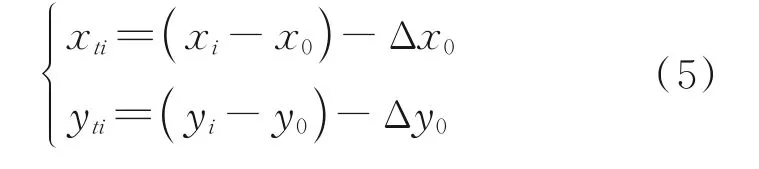
式中(xi,yi)為探測(cè)器提取得到的星點(diǎn)坐標(biāo)位置。
(2)光學(xué)系統(tǒng)透鏡誤差
光學(xué)系統(tǒng)透鏡安裝存在偏移誤差。透鏡偏移帶來(lái)的縮放比例誤差為Sy,探測(cè)器旋轉(zhuǎn)誤差為θ,徑向畸變(k1,k2)以及偏心畸變(p1,p2),可得到

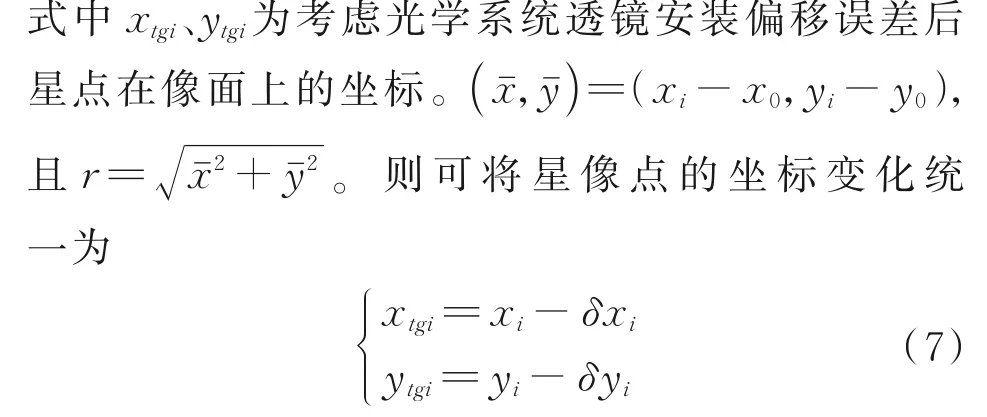
式中(δxi,δyi)為相機(jī)主點(diǎn)誤差和光學(xué)系統(tǒng)畸變所引起的坐標(biāo)位置偏移。
1.2.2 相機(jī)焦距的誤差
遙感光學(xué)衛(wèi)星發(fā)射入軌后由于環(huán)境發(fā)生變化,光學(xué)相機(jī)焦距也會(huì)發(fā)生變化。設(shè)焦距變化量為Δf,則焦距變化為

根據(jù)式(8)及相機(jī)內(nèi)方元素誤差,可得到星點(diǎn)的星矢量在相機(jī)坐標(biāo)系中的坐標(biāo)[3]為
1.2.3 星表的誤差
遙感衛(wèi)星最常見(jiàn)的星表為T(mén)ycho-2 星表,該星表大約具有2 500 000 個(gè)星目標(biāo),其平均位置精度達(dá)到60″,平均自行精度達(dá)到2.5″/a,可進(jìn)行光學(xué)載荷在軌高精度自標(biāo)定[8]。
2 光學(xué)載荷與星敏感器在軌互標(biāo)定
2.1 光學(xué)載荷在軌互標(biāo)定原理
光學(xué)載荷與星敏感器在軌互標(biāo)定指二者在軌光軸指向角度的標(biāo)定,如圖4 中的θ為二者光軸的夾角,其中星圖A和星圖B分別為星敏感器和光學(xué)載荷所觀測(cè)到的星區(qū)。
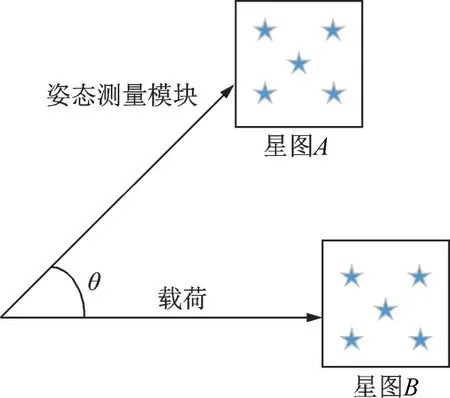
圖4 載荷和星敏感器互標(biāo)定示意圖Fig.4 Schematic diagram of mutual calibration between load and star sensor
為獲得互標(biāo)定角度θ,分別需要得到光學(xué)載荷和星敏感器的光軸指向信息,再解算二者光軸的夾角以及對(duì)應(yīng)的標(biāo)定精度。首先分別獲取在標(biāo)定時(shí)刻星敏感器和光學(xué)載荷星圖成像數(shù)據(jù),利用成像時(shí)刻衛(wèi)星的位置、速度和時(shí)間參數(shù)對(duì)星圖成像數(shù)據(jù)進(jìn)行光行差修正,可分別解算獲得星敏感器和光學(xué)載荷的光軸指向;再利用星敏感器和光學(xué)載荷光軸指向信息解算光軸夾角。互標(biāo)定流程如圖5 所示。
2.2 互標(biāo)定誤差分析
根據(jù)互標(biāo)定流程,互標(biāo)定誤差可分為星敏感器和載荷成像時(shí)間的偏差、星敏感器與載荷自身的指向誤差以及光行差效應(yīng)帶來(lái)的指向偏差。當(dāng)進(jìn)行地面外場(chǎng)實(shí)驗(yàn)時(shí),由于星光光需穿過(guò)大氣層,因此需要考慮大氣層折射引起的偏差。
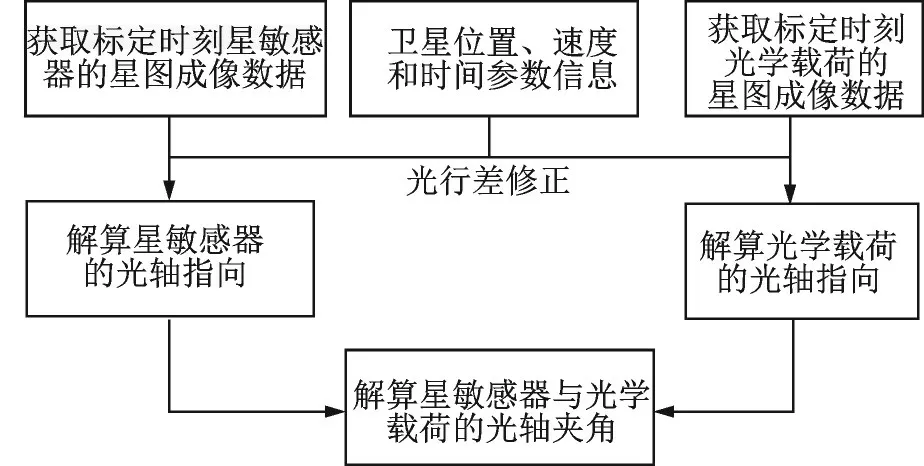
圖5 星敏感器和光學(xué)載荷互標(biāo)定流程Fig.5 Mutual calibration process of star sensor and load
2.2.1 星敏感器與載荷成像時(shí)間偏差
衛(wèi)星在軌以一定的角速度轉(zhuǎn)動(dòng),當(dāng)星敏感器與光學(xué)載荷成像時(shí)間不一致時(shí)將會(huì)導(dǎo)致互標(biāo)定出現(xiàn)偏差。目前星敏感器姿態(tài)四元數(shù)更新率可以達(dá)到10 Hz 以上,因此實(shí)際星敏感器與載荷成像星圖的時(shí)間差不超過(guò)0.05 s,并且可以采用線性插值對(duì)星敏感器輸出的四元數(shù)進(jìn)行插值處理,以減少時(shí)間不同步帶來(lái)的誤差。同時(shí),在進(jìn)行在軌標(biāo)定的過(guò)程中,需要保證衛(wèi)星本體相對(duì)于慣性空間的角速度為零,以降低時(shí)間差的影響[9]。
2.2.2 光行差效應(yīng)
光行差效應(yīng)是指運(yùn)動(dòng)的觀測(cè)者和同一地點(diǎn)靜止的觀測(cè)者觀察到光的方向存在偏差的現(xiàn)象,如圖6 所示。
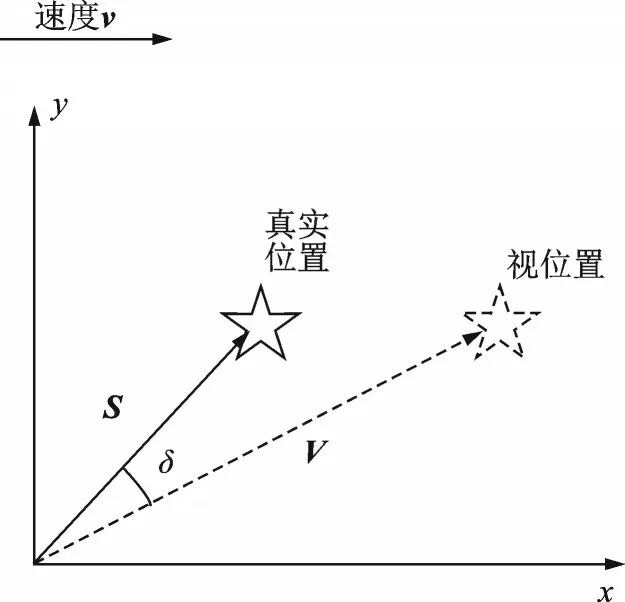
圖6 光行差效應(yīng)示意圖Fig.6 Schematic diagram of aberration effect
圖6 中,v表示物體在慣性坐標(biāo)系下的運(yùn)動(dòng)速度,U、V分別表示星點(diǎn)在靜止參考系與運(yùn)動(dòng)參考系下的觀測(cè)矢量,δ表示光行差效應(yīng)偏差角[10-11]。光行差效應(yīng)的偏差角δ為

式中c為光速。對(duì)于近地軌道衛(wèi)星,光行差效應(yīng)的偏差角最大能夠達(dá)到20.6″,并且由于星敏感器與光學(xué)載荷空間指向不同,二者存在的光行差效應(yīng)偏差角也不相同,將導(dǎo)致互標(biāo)出現(xiàn)偏差,因此需對(duì)光行差效應(yīng)進(jìn)行補(bǔ)償。
2.2.3 大氣折射補(bǔ)償
大氣折射是指直線前進(jìn)的光線或電磁波在穿越大氣層時(shí),由于空氣密度隨高度變化而產(chǎn)生偏折的現(xiàn)象,如圖7 所示。衛(wèi)星在空間對(duì)星目標(biāo)進(jìn)行觀測(cè),因此不需要考慮大氣折射,但是如果在外場(chǎng)地面實(shí)驗(yàn),則需考慮大氣折射因素。

圖7 大氣折射效應(yīng)示意圖Fig.7 Schematic diagram of atmospheric refraction effect
其中大氣折射的偏差角為
根據(jù)Owens[13]模型,可利用溫度、大氣壓強(qiáng)以及大氣相對(duì)濕度對(duì)大氣折射率進(jìn)行估計(jì)。
3 星敏感器與光學(xué)載荷地面標(biāo)定實(shí)驗(yàn)
3.1 光學(xué)載荷地面自標(biāo)定測(cè)試
光學(xué)載荷地面自標(biāo)定測(cè)試結(jié)果分析以星區(qū)一為例,光學(xué)相機(jī)對(duì)星區(qū)一進(jìn)行拍攝成像。地面星敏感器和光學(xué)相機(jī)(望遠(yuǎn)鏡)安裝如圖8(a)所示,圖8(b)為拍攝得到的星圖星點(diǎn)。
圖8(b)中連串的圓圈表示提取的恒星目標(biāo)在像面上的移動(dòng)軌跡,也說(shuō)明此處的恒星目標(biāo)有效;其他單個(gè)星點(diǎn)表示由于傳感器等其他原因?qū)е碌恼`提取點(diǎn)目標(biāo)。星圖識(shí)別結(jié)果如表1 所示,可以看出,星圖識(shí)別極限星等可達(dá)11.5 等星。
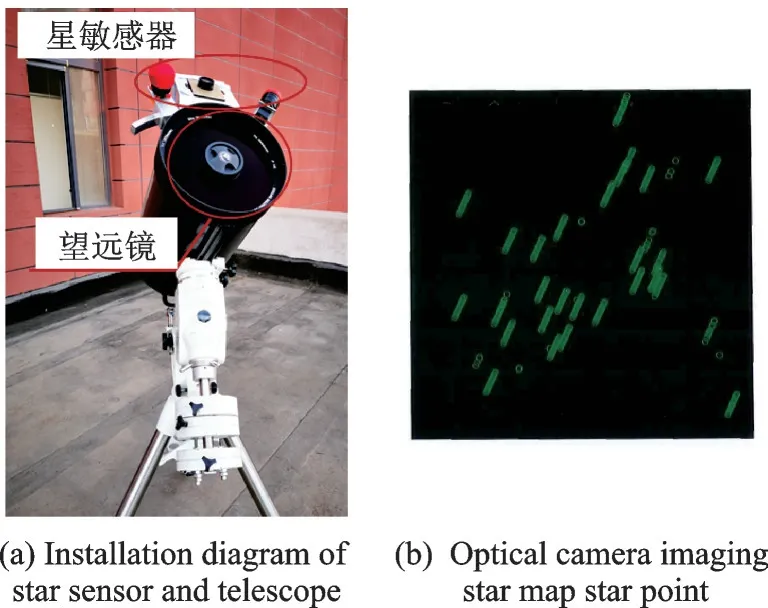
圖8 光學(xué)載荷地面標(biāo)定試驗(yàn)Fig.8 Ground calibration test of optical load
假設(shè)光學(xué)載荷對(duì)星空成像了N幀星圖,首先每幀星圖中均有M顆匹配星,如圖9 所示,對(duì)1 星進(jìn)行最小二乘定心[14]。

圖9 幀內(nèi)對(duì)星點(diǎn)1 進(jìn)行定心Fig.9 Center Star 1 in frame
以1 星定心為例,建立測(cè)量計(jì)算匹配星角距與參考角距的誤差矩陣[15]
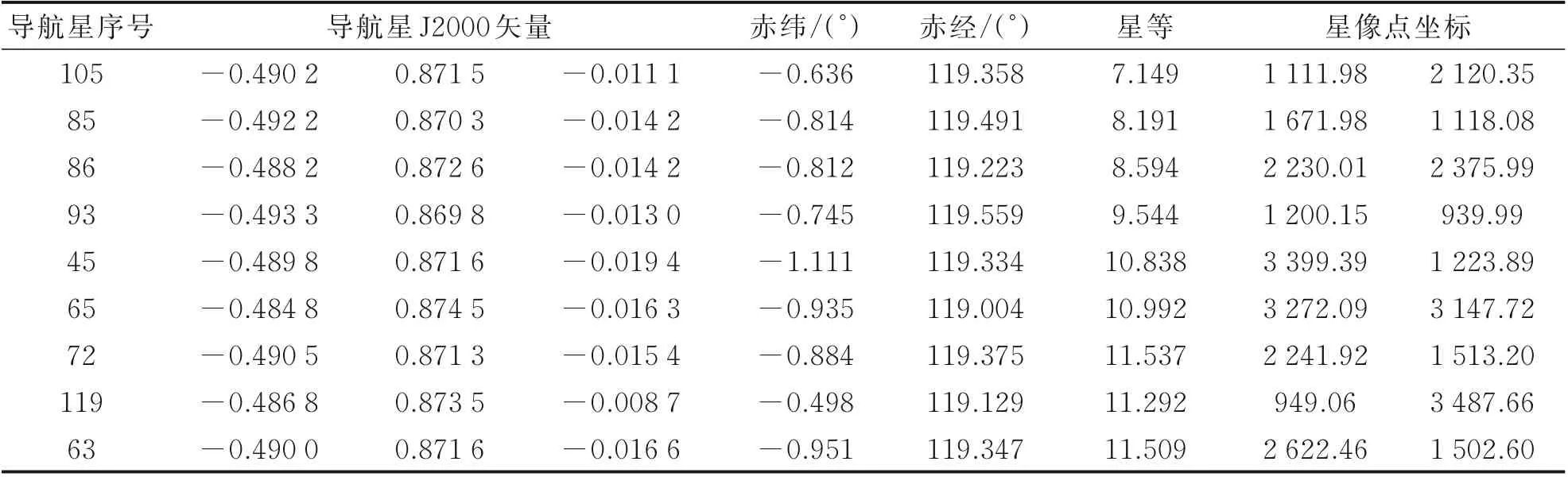
表1 光學(xué)載荷對(duì)星區(qū)一星圖識(shí)別結(jié)果Table 1 Recognition results of optical load on star region Ι

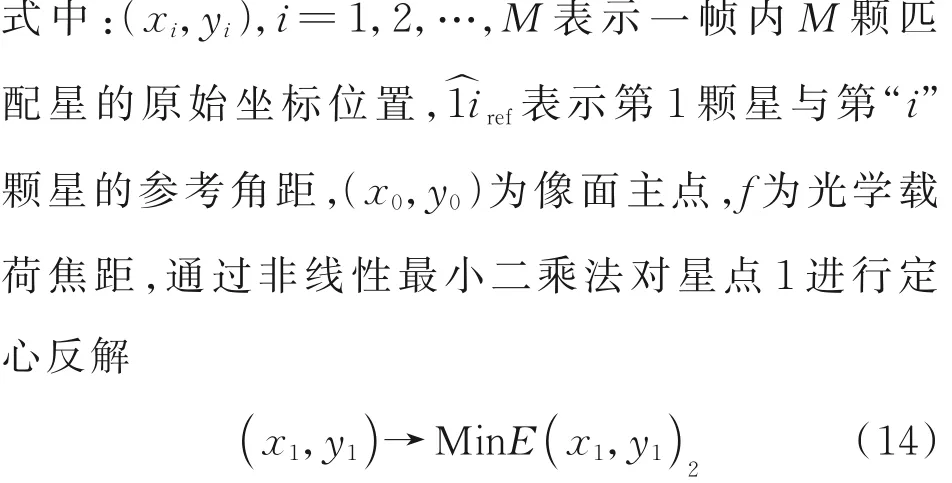
式中各參考角距的確定是利用多幀對(duì)應(yīng)匹配星角距進(jìn)行平均得到,這樣可以在保留像面的畸變信息的情況下提高星點(diǎn)的位置精度

根據(jù)以上方法,利用星區(qū)一星圖識(shí)別結(jié)果,進(jìn)行光學(xué)載荷地面自標(biāo)定,標(biāo)定結(jié)果如圖10 所示。圖10(a)為焦距標(biāo)定結(jié)果,得到焦距標(biāo)定精度為0.48 mm(3σ,標(biāo)定焦距為2 660.8 mm);圖10(b)為光軸指向自標(biāo)定結(jié)果,自標(biāo)定精度為0.198″(3σ),標(biāo)定結(jié)果優(yōu)于地面標(biāo)定精度(約0.5″)。
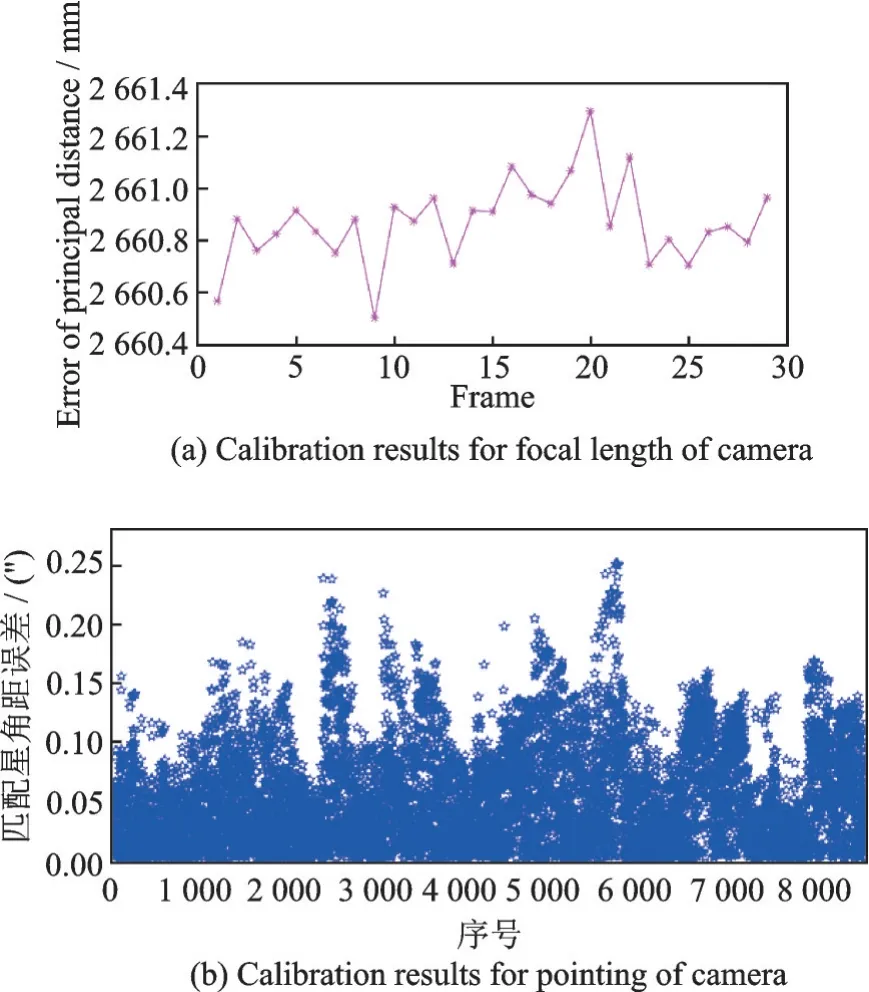
圖10 光學(xué)載荷地面自標(biāo)定結(jié)果Fig.10 Ground self-calibration results of optical load
3.2 星敏感器與載荷互標(biāo)定測(cè)試
為了驗(yàn)證星敏感器和光學(xué)載荷互標(biāo)定,需要對(duì)不同星區(qū)進(jìn)行光學(xué)載荷指向成像。星區(qū)一的結(jié)果見(jiàn)3.1 節(jié),星區(qū)二星圖星點(diǎn)提取以及識(shí)別結(jié)果分析分別如圖11 和表2 所示。
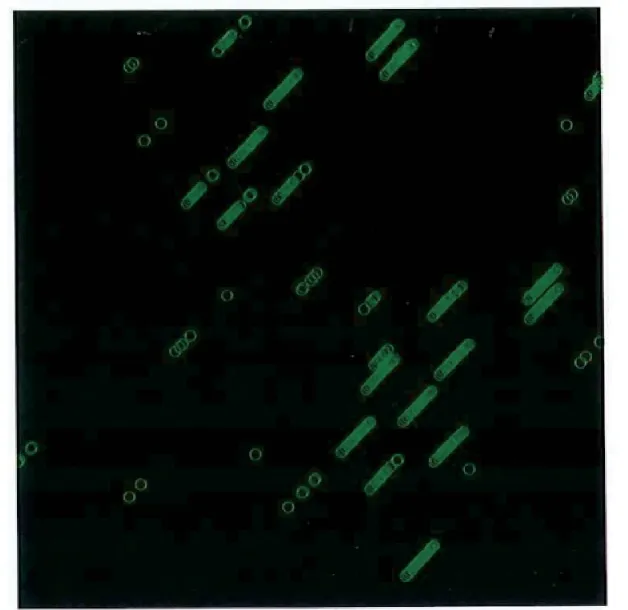
圖11 星區(qū)二星圖星點(diǎn)提取結(jié)果Fig.11 Star point extraction results of star map in star region Ⅱ

表2 星區(qū)二星圖識(shí)別結(jié)果Table 2 Recognition results of star map in star regionⅡ
通過(guò)計(jì)算4 個(gè)星區(qū)成像期間星敏感器與光學(xué)相機(jī)夾角的變化,并對(duì)光行差效應(yīng)以及大氣折射進(jìn)行補(bǔ)償,可分別得到4 個(gè)星區(qū)內(nèi)星敏感器與光學(xué)相機(jī)光軸夾角,如圖12 所示。

圖12 光學(xué)相機(jī)與星敏感器夾角補(bǔ)償前后Fig.12 Change of angle between optical camera and star sensor before and after compensation
通過(guò)圖11 可以看出,通過(guò)2 個(gè)不同星區(qū)分別得到光學(xué)相機(jī)與星敏感器的夾角平均值為25.177 4°與25.1816°;測(cè)量精度分別為1.424 7″(3σ)與1.905 3″(3σ)。通過(guò)對(duì)其進(jìn)行誤差補(bǔ)償,兩個(gè)星區(qū)光學(xué)相機(jī)與星敏感器光軸夾角可收斂(補(bǔ)償前互標(biāo)定誤差為18.7″)。可以看出,經(jīng)過(guò)補(bǔ)償后的光學(xué)相機(jī)與星敏感器光軸夾角精度大幅提升(優(yōu)于2″)。
4 在軌測(cè)試及驗(yàn)證
4.1 光學(xué)載荷在軌自標(biāo)定測(cè)試

圖13 遙感微納衛(wèi)星對(duì)星區(qū)一連續(xù)成像星點(diǎn)提取結(jié)果Fig.13 Extraction results of continuous imaging star points in star regionⅠfrom remote sensing microsatellites
根據(jù)以上方法,利用在軌遙感微納衛(wèi)星對(duì)星區(qū)一進(jìn)行遙感成像連續(xù)成像,如圖13 所示。星區(qū)一光學(xué)載荷識(shí)別結(jié)果見(jiàn)表3。根據(jù)星區(qū)一得到的星點(diǎn)提取以及星圖識(shí)別結(jié)果,結(jié)合星敏感器進(jìn)行光學(xué)載荷標(biāo)定,光學(xué)載荷焦距標(biāo)定精度為0.1 mm(3σ),如圖14(a)所示;光學(xué)載荷自標(biāo)定精度為0.079 3″(3σ),如圖14(b)所示,標(biāo)定結(jié)果優(yōu)于地面標(biāo)定精度(約0.5″)。
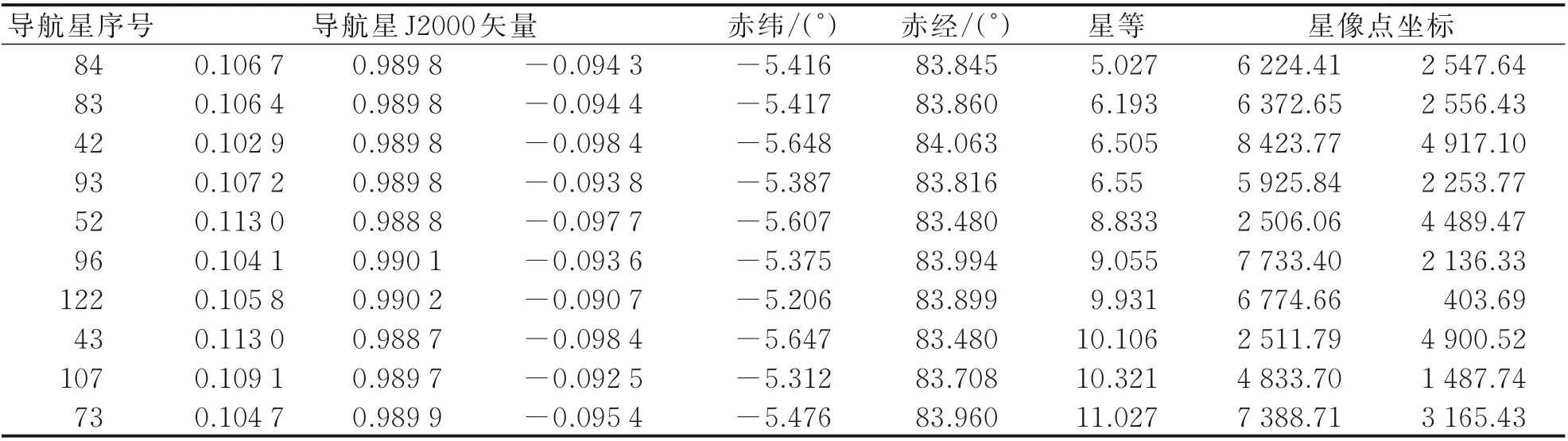
表3 光學(xué)載荷對(duì)星區(qū)一識(shí)別結(jié)果Table 3 Recognition results of optical load on star regionⅠ

圖14 載荷在軌自標(biāo)定結(jié)果Fig.14 Self-calibration results of load on orbit
4.2 在軌互標(biāo)定測(cè)試
利用在軌遙感微納衛(wèi)星進(jìn)行多個(gè)星區(qū)拍攝成像,以驗(yàn)證互標(biāo)定的有效性,表4 為星區(qū)二星圖識(shí)別結(jié)果,可以得到星敏感器和光學(xué)載荷的光軸夾角,如圖15 所示。可以看出,由于光行差效應(yīng)的存在,在星區(qū)一和星區(qū)二成像的情況下,星敏感器與光學(xué)載荷的夾角并不相同。經(jīng)過(guò)光行差補(bǔ)償,光學(xué)載荷與星敏感器的光軸夾角得到很好的收斂。經(jīng)過(guò)補(bǔ)償后星敏感器與光學(xué)載荷的夾角精度為1.85″。
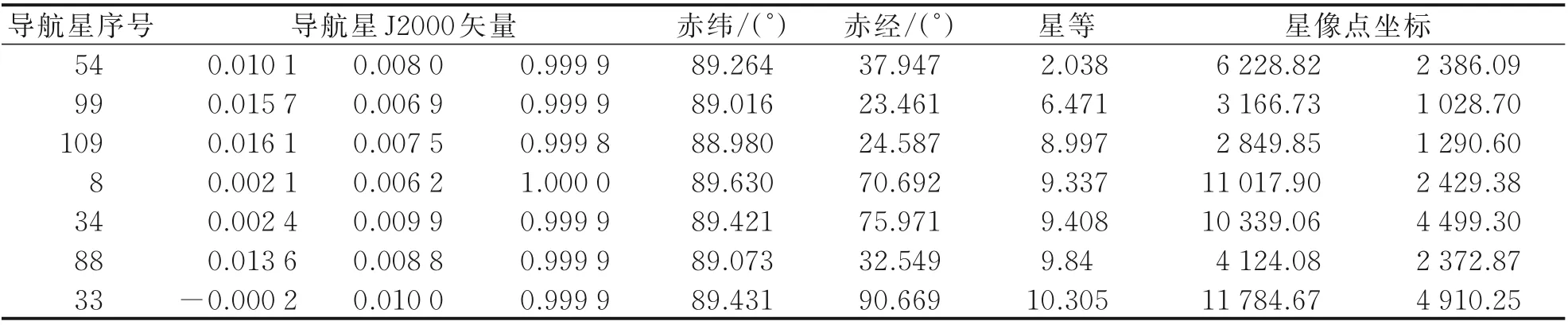
表4 星區(qū)一星圖識(shí)別結(jié)果Table 4 Recognition results of star map in star regionⅠ
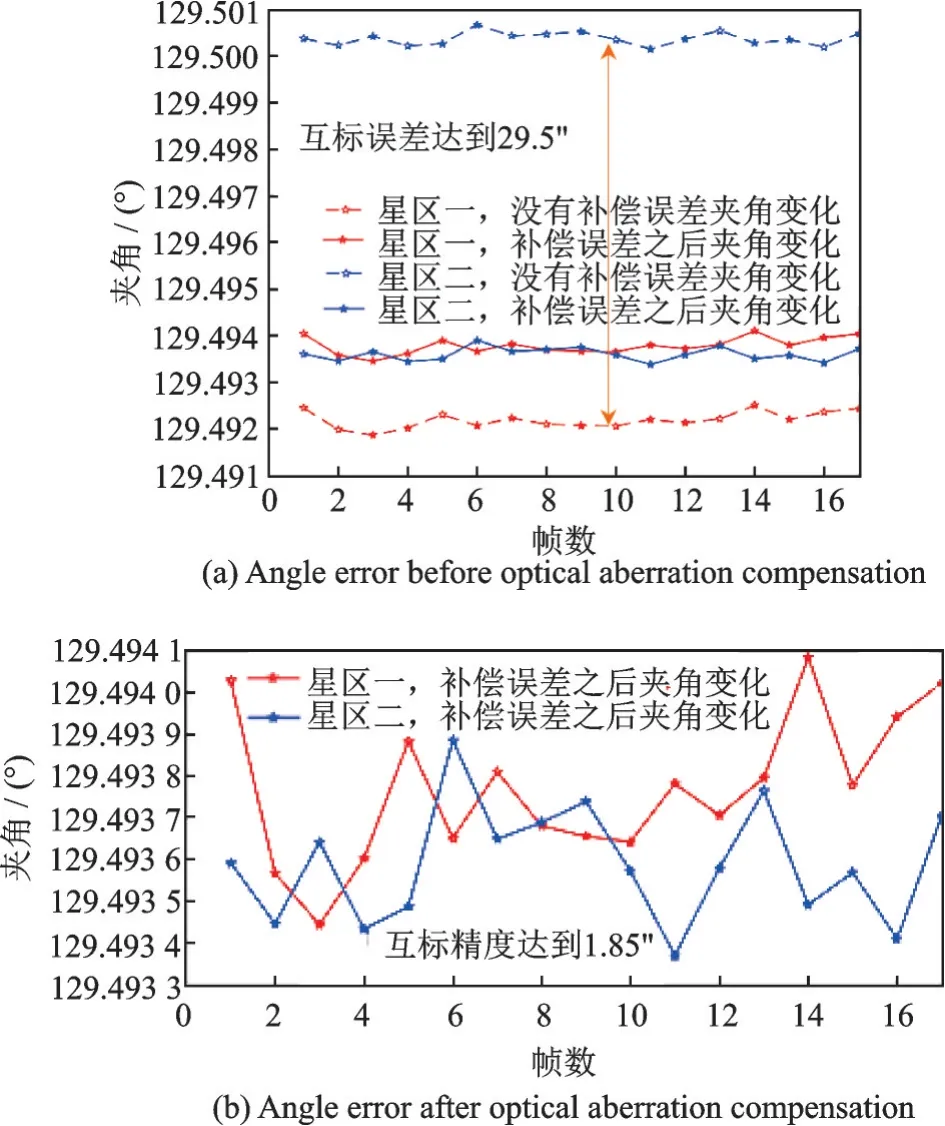
圖15 載荷在軌互標(biāo)定結(jié)果Fig.15 On-orbit calibration results of star sensor and optical load
5 結(jié)論
本文針對(duì)目前遙感微納衛(wèi)星在軌標(biāo)定誤差較大的問(wèn)題,提出針對(duì)遙感微納衛(wèi)星在軌光學(xué)載荷自標(biāo)定、光學(xué)載荷與星敏感器互標(biāo)定方法,充分考慮了遙感衛(wèi)星成像的各項(xiàng)誤差和影響因素,并分別在地面和在軌進(jìn)行實(shí)驗(yàn)驗(yàn)證。實(shí)驗(yàn)驗(yàn)證結(jié)果表明,利用光學(xué)載荷對(duì)恒星觀測(cè)的方式實(shí)現(xiàn)自標(biāo)定,光學(xué)載荷標(biāo)定精度可達(dá)到0.2″(標(biāo)定結(jié)果優(yōu)于地面標(biāo)定精度0.5″);通過(guò)對(duì)地面大氣折射誤差進(jìn)行補(bǔ)償,可以使星敏感器和光學(xué)載荷夾角誤差由18.7″降低至1.9″(3σ);通過(guò)對(duì)在軌光行差大氣折射誤差進(jìn)行補(bǔ)償,可以使星敏感器和光學(xué)載荷夾角誤差由29.5″降低至1.85″(3σ)。通過(guò)在軌自標(biāo)定和互標(biāo)定,可有效降低由于微納衛(wèi)星星敏感器精度較低引起的定姿和指向誤差(利用光學(xué)載荷對(duì)低精度星敏感器進(jìn)行標(biāo)定和修正),以及提升遙感微納衛(wèi)星在軌成像質(zhì)量。
 南京航空航天大學(xué)學(xué)報(bào)2022年3期
南京航空航天大學(xué)學(xué)報(bào)2022年3期
- 南京航空航天大學(xué)學(xué)報(bào)的其它文章
- 裝備系統(tǒng)剩余使用壽命預(yù)測(cè)技術(shù)研究進(jìn)展
- 自動(dòng)鉆鉚裝備的激光測(cè)量系統(tǒng)法向誤差研究
- 特征自適應(yīng)的飛機(jī)大型蒙皮曲面測(cè)量系統(tǒng)與測(cè)量規(guī)劃
- 具有遠(yuǎn)近視距引導(dǎo)的機(jī)械臂多工位精確對(duì)準(zhǔn)技術(shù)
- 硬質(zhì)合金與結(jié)構(gòu)鋼釬焊結(jié)構(gòu)低溫力學(xué)性能試驗(yàn)
- 基于軌跡大數(shù)據(jù)時(shí)空分布的索引與查詢(xún)方法