基于高增益擾動觀測器的反演控制方法研究
2022-06-28 01:18:30樊建升劉澤軍
山西焦煤科技 2022年5期
樊建升,劉澤軍
(1.山西焦煤能源集團股份有限公司,山西 太原 030006;2.古交西山發電有限責任公司, 山西 太原 030024)
一直以來,反演控制因其穩定、結構化、非線性設計的優點,被廣泛研究并應用[1].反演控制方法的提出與應用,主要解決了一些系統自身滿足嚴反饋結構的非線性系統的控制器設計問題。同時,在部分非線性系統的結構化設計問題上,反演控制也具有相當的處理能力。根據反演控制的原理,在設計過程中,反演控制要求獲得系統的精確數學模型。然而,實際非線性系統模型中,存在大量的系統假設,加上系統本身具有的參數時變及時滯特性、不確定性外界干擾、以及強耦合、變量之間的隱式非線性、指數或分數等復雜非線性關系等因素,系統模型往往存在偏差或部分未知。同時,非線性系統中存在的高階高維狀態變量、多輸入輸出、耦合等因素,傳統的反演控制設計往往還會導致控制系統性能變差[2].
在一些復雜系統中,系統狀態往往難以測量。狀態觀測器根據系統輸入輸出估計系統內部狀態[3].常被研究與應用的觀測器有:高增益觀測器、擴張狀態觀測器、滑模觀測器以及卡爾曼濾波器等[4-7].此外,擾動觀測器作為一種在線估計算法,將系統不確定性、未建模動力學和外部擾動的組合效應聚合為擾動項,在模型不確定性的復雜系統狀態獲取和控制改進上顯示出了優勢[8].在擴展狀態空間模型的基礎上,擾動觀測器主要應用于估計標稱對象模型中未考慮的集中不確定性。一些研究如滑模擾動觀測器、非線性擾動觀測器以及作為擴展階線性觀測器的高增益擾動觀測器等,將擾動觀測器引入不同控制設計,解決了狀態或非線性擾動的獲取問題。由于高增益擾動觀測器的穩定性易保證和簡單設計等優點,常被用于實現功能估計和補償[9].
為此,本文提出了一種基于高增益擾動觀測器的反演控制設計方法。首先,擴張系統狀態,引入虛擬項替代系統擾動;其次,基于高增益擾動觀測器原理設計觀測狀態,獲得用于替代真實系統非線性項的函數表達式;最后基于反演控制,設計虛擬控制器和實際控制器。將本文算法應用于一個三變量的非線性系統,通過仿真驗證方法的可行性和有效性。
1 簡單化工模型
三變量非線性釜系統在零動態穩定下的狀態空間方程如下[10]:
(1)
其中,各參數值分別為Da1=3.0、Da2=0.5和Da3=1.0.
由式(1)可以看出,此過程具有狀態耦合和非線性等特點。常規控制方法需要經過解耦和模型轉換實現控制設計。當存在不確定性和較大的未知噪聲干擾時,控制設計變得無效。
2 基于高增益擾動觀測器的反演控制方法
為便于后續控制設計,對系統狀態變量進行順序定義以滿足反演控制框架要求,令x1=x3,x2=x1,x3=x2.
2.1 高增益擾動觀測器
高增益擾動觀測器用于式(1)的狀態空間,定義一個虛擬狀態來表示系統擾動,即ψ4(·),將原3階系統擴展為4階系統。因此,系統的四階HGPO設計如下:
(2)
其中,[α1/ε,α2/ε2,…,αn-1/εn-1,αn/εn]T為觀測器增益,且0<ε<1.并且,觀測器增益是根據擾動導數的上界確定的。需要指出的是,對于HGSPO的設計,只需要測量輸出和輸入。
2.2 控制設計
反演控制設計的基本思路是:1)將系統設計為多個不超過系統階數的級聯子系統,以進行遞階控制設計。2)子系統逐級設計Lyapunov函數,在子系統收斂的條件下,推導虛擬控制器,并將子系統的虛擬控制器作為下一級子系統的跟蹤目標。經過逐級推導,最終得到實際控制器。反演控制基于Lyapunov函數的設計保證了閉環系統的一致收斂。
在進行控制設計之前,首先通過高增益狀態擾動觀測器對系統進行觀測,以在觀測狀態中包含系統未建模以及干擾等非線性因素,其次通過低通濾波對直接配置得到的未知非線性估計項濾波,避免干擾數據引入控制設計中。最后,基于反演控制設計控制器。控制框圖見圖1.

圖1 基于高增益擾動觀測器的反演控制框圖
首先,求取狀態一階導,獲得新的狀態空間為:
(3)
(4)
因此,設計虛擬控制器和實際控制器如下:
(5)
通過低通濾波器對虛擬控制器求導,并將式(5)代入式(4)中,可以得到Lyapunov總函數可以寫為如下形式:
(6)
在觀測器收斂情況下,通過選擇適當控制參數ci,可以保證閉環系統最終一致有界。
3 仿真結果分析
通過實際系統仿真,在matlab2016b環境下對本文方法進行驗證。參數分別選取為:系統初始狀態以及觀測器的初始狀態均設置為[0.15 0.2 -0.1]T.系統采樣時間設置為Ts=0.001 s,總時長為ts=30 s.引入零均值高斯白噪聲noise=0.01×randn(size(0.01,1),N),N=ts/Ts.觀測器參數選取為α=[110,2 000,800,1 000]T,b=1 000,ε=0.05.選取可行的控制器參數c=[5,9 000 000,92 900]T,η=1011.選取低通濾波器帶寬為τ=0.1,dt=0.001.得到圖2和圖3所示的結果。
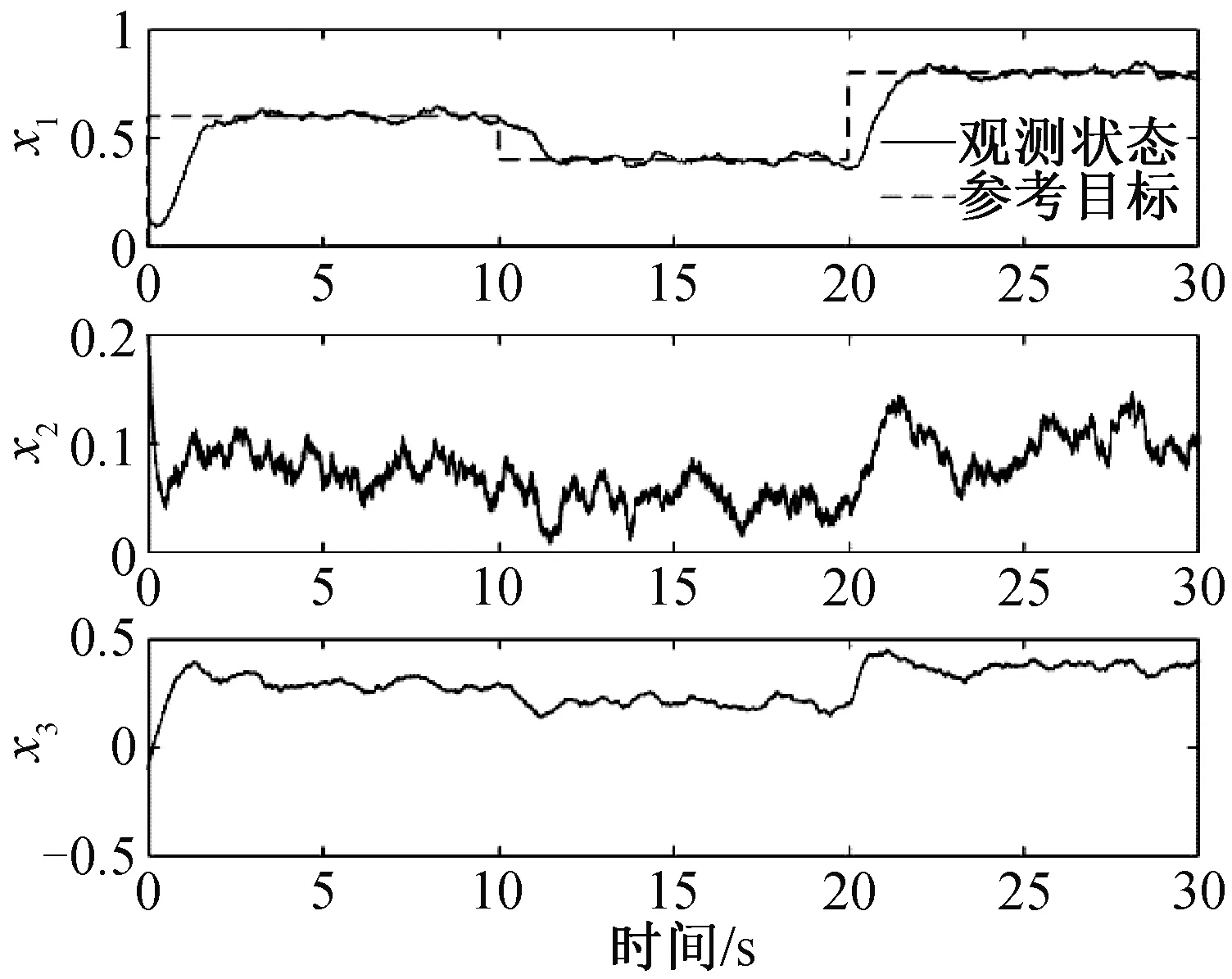
圖2 高增益擾動觀測器下閉環系統的狀態追蹤效果圖
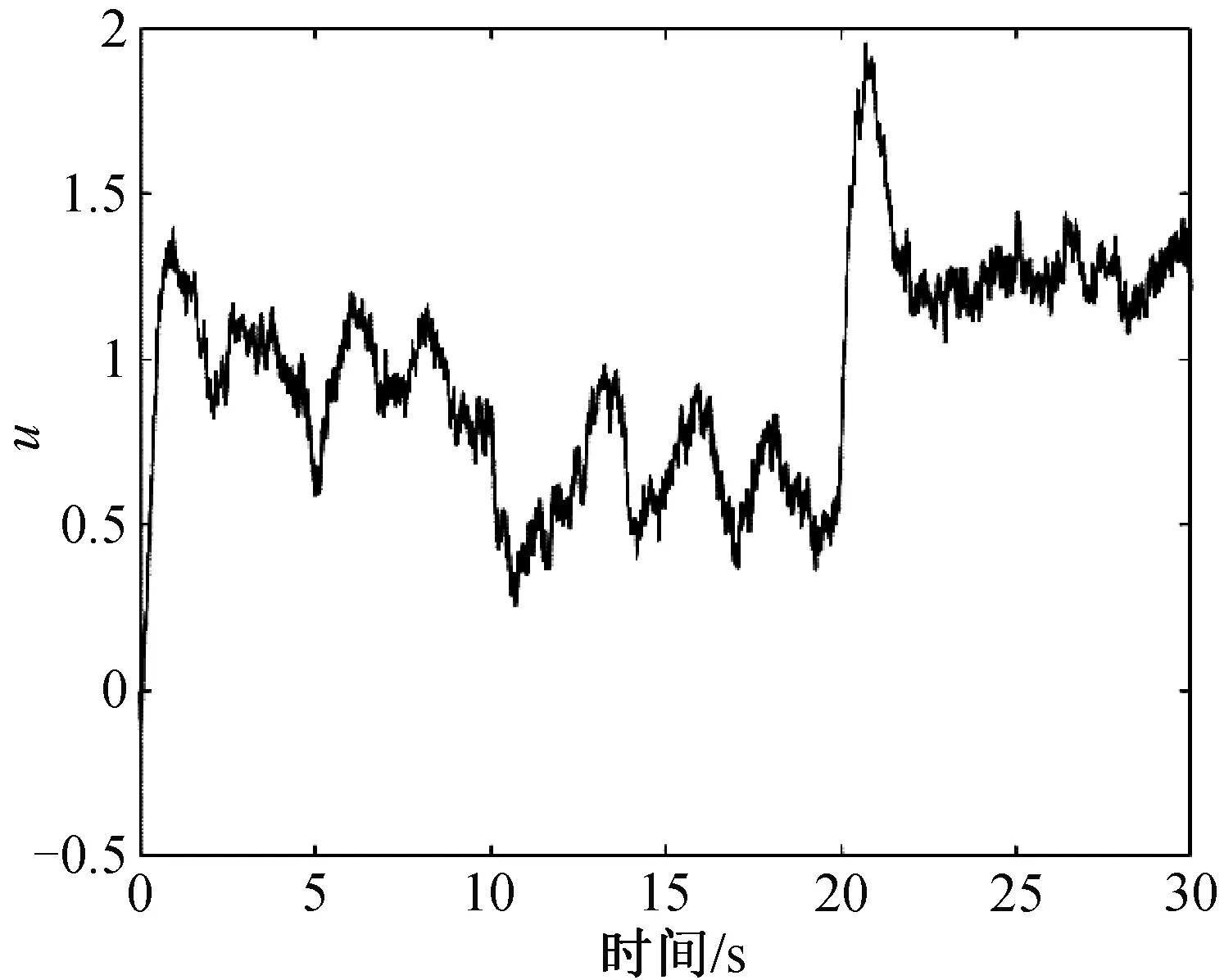
圖3 高增益擾動觀測器下閉環系統的控制輸入圖
通過上述仿真,結果顯示出在該控制設計下,基于高增益擾動觀測器的反演控制設計可行,系統穩定運行,追蹤效果收斂,獲得較好的魯棒性。但高增益擾動觀測器具有放大噪聲的功效,盡管通過高增益擾動觀測器,實現了系統模型不確定下的控制,但觀測狀態中的噪聲仍然較大。計劃在后續工作中改進觀測器設計,以實現噪聲干擾的抑制。
4 結 論
本文提出了一種基于高增益擾動觀測器的反演控制方法。在傳統反演控制設計基礎上,引入高增益擾動觀測器,實現在僅知系統輸入輸出和階數的狀態觀測,并包含了模型不確定性因素。在狀態已知基礎上,系統非線性項的配置與估計用于反演控制設計中,保證了閉環系統在不確定或已有非線性因素下,具有良好的穩定性和性能表現。通過三變量的化工過程仿真,結果驗證了該方法的有效性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
