一種改進(jìn)的圖像灰度匹配方法
2022-06-27 08:37:58童偉
鐵路通信信號(hào)工程技術(shù) 2022年6期
關(guān)鍵詞:區(qū)域
童 偉
(通號(hào)城市軌道交通技術(shù)有限公司,北京 100070)
1 概述
目前國(guó)內(nèi)的城市軌道交通信號(hào)系統(tǒng)已經(jīng)進(jìn)入到全自動(dòng)駕駛的階段,全自動(dòng)運(yùn)行系統(tǒng)(Fully Automatic Operation,F(xiàn)AO)模式下地鐵列車已經(jīng)可以在沒有司機(jī)的情況下運(yùn)營(yíng)。技術(shù)升級(jí)削減人工,但對(duì)于隧道、線路空間中出現(xiàn)的障礙物,則需要障礙檢測(cè)裝置的介入替代人為對(duì)環(huán)境因素的判斷。通常障礙物檢測(cè)采用傳感器,即依靠雷達(dá)或者機(jī)器視覺。
機(jī)器視覺(Machine Vision)是模擬人對(duì)圖像感知、判讀過程,通過對(duì)光學(xué)設(shè)備收集的真實(shí)場(chǎng)景圖像以及紅外、雷達(dá)等非接觸式傳感器的采集信息進(jìn)行分析、計(jì)算、處理后得出可靠的信息,用于控制機(jī)器人或者相關(guān)裝置的動(dòng)作的一門學(xué)科。機(jī)器視覺系統(tǒng)中最常用也最為重要的功能是圖像模式匹配。通過圖像模式匹配,可以實(shí)現(xiàn)目標(biāo)校準(zhǔn)、測(cè)量、檢測(cè)以及分類等應(yīng)用。圖像模式匹配中比較常用的一種方法是圖像灰度匹配(Grayscale Matching),以目標(biāo)圖像中灰度梯度或像素灰度信息作為比較的特征值,通過一系列的對(duì)比、計(jì)算活動(dòng),生成模板圖像與目標(biāo)圖像區(qū)域之間歸一化互相關(guān)值(Normalized Cross-Correlation)來確定匹配區(qū)域。
2 常見灰度匹配方法
常見的圖像灰度匹配方法先對(duì)圖像灰度進(jìn)行歸一化,然后在目標(biāo)圖像中滑動(dòng)模板圖像,可以計(jì)算出目標(biāo)與模板的兩幅圖像比較區(qū)域的歸一化互相關(guān)值,從而確定目標(biāo)與模板匹配的范圍、區(qū)域。若用I表示像素的灰度值,IMax和IMin代表原圖灰度的最大值及最小值,InewMax和InewMin代表線性歸一化圖像所包含灰度信息的最大值及最小值,那么如公式(1)所示,可以計(jì)算線性歸一化的圖像灰度。

若采用尺寸為K×L的模板圖像T(x,y),將其在尺寸為M×N的圖像f(x,y)中從上到下、從左到右順序移動(dòng)(K≤ M 且L≤ M)時(shí),它與目標(biāo)圖像中點(diǎn)(i,j)處區(qū)域的互相關(guān)值如公式(2)所示。

由于灰度匹配中的計(jì)算像素的乘積之和是互相關(guān)值,所以互相關(guān)值與圖像灰度幅值的大小變化強(qiáng)相關(guān)。為避免或減少偏差,實(shí)際中通常使用下面歸一化互相關(guān)值(Pearson相關(guān)系數(shù)),來消除圖像灰度幅值的影響,如公式(3)所示。

Pearson相關(guān)系數(shù)計(jì)算結(jié)果在 [-1,1]區(qū)間,值越大說明模板和其覆蓋的目標(biāo)圖像區(qū)域越相似。
在實(shí)際應(yīng)用中,當(dāng)被測(cè)目標(biāo)在圖像中平移和灰度變化時(shí),歸一化互相關(guān)值(Pearson相關(guān)系數(shù))可保持良好的匹配結(jié)果,但是當(dāng)圖像的尺度變化和旋轉(zhuǎn)時(shí),歸一化互相關(guān)值則匹配度特別敏感。通常來說,只有在圖像不發(fā)生尺度變化,且被測(cè)目標(biāo)僅在10°以內(nèi)旋轉(zhuǎn)時(shí),才能較好地完成圖像的匹配過程。而當(dāng)圖像有縮放時(shí),直接使用這種匹配方法幾乎無法得到實(shí)用的匹配結(jié)果。為了提高圖像灰度匹配過程的實(shí)用性,必須設(shè)法使其盡量減少對(duì)圖像的尺度變化和旋轉(zhuǎn)關(guān)聯(lián),即具有尺度不變性和旋轉(zhuǎn)不變性。
要使圖像處理算法具有尺度不變性和旋轉(zhuǎn)不變性,一般要對(duì)模板進(jìn)行多次縮放或旋轉(zhuǎn)。在每次縮放或旋轉(zhuǎn)后,都要使用得到的模板重復(fù)一次與目標(biāo)圖像的匹配過程,最后再?gòu)乃袣w一化互相關(guān)值中選出極大值,并將其對(duì)應(yīng)的區(qū)域作為匹配結(jié)果輸出。在此過程中,縮放比例或旋轉(zhuǎn)角度的間隔越小,匹配的準(zhǔn)確程度越高,但計(jì)算量也越大。此外,求歸一化互相關(guān)值的過程本身也需要很大的計(jì)算量,若再按照上述方法去獲取尺度和旋轉(zhuǎn)的不變性,得到的匹配結(jié)果根本不具有實(shí)用性。因此需要對(duì)不變性和實(shí)時(shí)性進(jìn)行權(quán)衡,使灰度匹配算法結(jié)果在兩個(gè)維度均能被實(shí)際應(yīng)用接受。
3 改進(jìn)型灰度比較方法
考慮實(shí)際地鐵工程應(yīng)用中,被測(cè)目標(biāo)在拍攝到的圖像中尺度變化極小,因此為了提高算法的實(shí)用性,可放棄灰度匹配算法對(duì)尺度不變性的支持,不進(jìn)行各種尺度的模板與圖像中目標(biāo)的匹配計(jì)算,而是專注于將圖像灰度匹配過程的旋轉(zhuǎn)不變性和實(shí)時(shí)性提升至大多數(shù)機(jī)器視覺應(yīng)用可接受的范圍。具體來說,可使用“高斯圖像金字塔(Gaussian Pyramid)法”和“先粗后細(xì)的匹配(Coarse-to-Fine Matching)”策略,來兼顧旋轉(zhuǎn)不變性和實(shí)時(shí)性。在機(jī)器視覺學(xué)習(xí)和匹配過程中,同時(shí)對(duì)模板及目標(biāo)圖像進(jìn)行多次隔行隔列的二進(jìn)制下采樣,生成多幅逐漸遞減的高斯圖像金字塔(尺寸為1/4倍、分辨率為1/2倍),從而有效減少后續(xù)計(jì)算數(shù)據(jù)量,如圖1所示。在學(xué)習(xí)階段,算法自動(dòng)計(jì)算模板圖像已生成的最高金字塔等級(jí),然后提取金字塔的各層和多次旋轉(zhuǎn)后生成圖像中的特征值。接下來針對(duì)模板數(shù)據(jù),算法進(jìn)行分析,確定最迅速給出且最為精確的“最優(yōu)”金字塔級(jí),然后將其連同特征數(shù)據(jù)一起保存在模板圖像中,為后續(xù)相關(guān)數(shù)據(jù)處理提供信息。
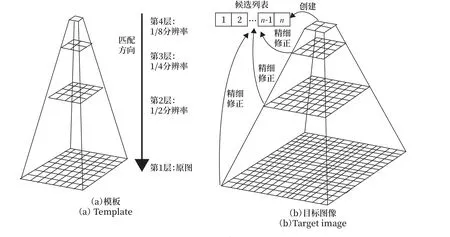
圖1 高斯圖像金字塔與先粗后細(xì)匹配示意Fig.1 Schematic diagram of Gaussian Pyramid and Coarse-to-Fine Matching
本算法在圖像匹配階段是從圖像金字塔的最高層開始,對(duì)該層與相應(yīng)的模板圖像進(jìn)行灰度匹配。由于縮小了模板和目標(biāo)圖像,可以很快完成整個(gè)匹配運(yùn)算過程。為彌補(bǔ)因下采樣導(dǎo)致的圖像信息丟失對(duì)算法可靠性的影響,可以在最高層匹配時(shí)就建立一個(gè)候選匹配區(qū)域列表,記錄多個(gè)可能的匹配區(qū)域。對(duì)于各低層分辨率較高的模板和金字塔圖層,則僅對(duì)其重新計(jì)算候選區(qū)域與模板的歸一化互相關(guān)值。
為能兼顧旋轉(zhuǎn)不變性和實(shí)時(shí)性,算法在金字塔最高層進(jìn)行灰度匹配時(shí),不僅在目標(biāo)層滑動(dòng)縮小后的模板計(jì)算目標(biāo)及匹配圖像的歸一化互相關(guān)值,還會(huì)先以一個(gè)較粗的角度間隔旋轉(zhuǎn)模板,再對(duì)歸一化互相關(guān)值較大的多個(gè)區(qū)域按照較小的旋轉(zhuǎn)角度進(jìn)行精細(xì)匹配。而這種情況下的候選區(qū)域列表,則基于所有歸一化互相關(guān)值,按由大到小的順序來選擇創(chuàng)建。此后,對(duì)于各低層模板和金字塔圖層,算法則不僅基于較高分辨率重新計(jì)算候選區(qū)域與模板的歸一化互相關(guān)值,還會(huì)按照更小的旋轉(zhuǎn)間隔對(duì)其進(jìn)行更新。計(jì)算完成后,最終的記錄列表中歸一化互相關(guān)值最大的區(qū)域,即為與模板最相似的匹配區(qū)域。
4 結(jié)束語
以上改進(jìn)的圖像灰度模式匹配方法適合解決大多數(shù)常規(guī)的機(jī)器視覺問題,但應(yīng)注意該方法對(duì)圖像的尺度變化(僅能處理小于±5%的尺度變化)和光源的非線性變化適應(yīng)性較差。此外,當(dāng)目標(biāo)旋轉(zhuǎn)角度大于±10%時(shí),該算法的實(shí)時(shí)性會(huì)下降,因此實(shí)際中應(yīng)通過其他輔助手段限定目標(biāo)的旋轉(zhuǎn)角度或考慮使用幾何匹配法。
在城市軌道交通中,由于線路上的物品相對(duì)較為單一,圖像尺度變化較少。本方法應(yīng)用可以有效地提高對(duì)目標(biāo)的識(shí)別,為障礙物的識(shí)別提供一種有效的算法。
猜你喜歡
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
科學(xué)(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學(xué)輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農(nóng)墾科技(2016年2期)2016-08-21 13:50:16
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
新疆財(cái)經(jīng)大學(xué)學(xué)報(bào)(2015年3期)2015-12-10 03:49:15