面向水聲傳感網的自主水下航行器輔助定位動態路徑規劃
2022-06-25 08:40:04黃沛爍王易因關新平黃夢醒
電子與信息學報 2022年6期
黃沛爍 王易因 關新平 黃夢醒
①(海南大學信息與通信工程學院 海口 570228)
②(上海交通大學自動化系 上海 200240)
③(系統控制與信息處理教育部重點實驗室 上海 200240)
1 引言
水聲傳感器網絡(Underwater Acoustic Sensor Networks, UASNs)在海洋資源勘探、海洋生態保護、軍事領域均有著重要應用。UASNs節點布放之后受洋流作用很可能會出現位置偏移,故需要進行位置修正,位置修正實質上也是對UASNs節點定位。不論UASNs還是無線傳感器網絡(Wireless Sensor Network, WSNs),都需要位置信息賦予數據意義。在WSNs的移動錨點輔助定位的路徑規劃方面已有一些研究成果如文獻[1-6],對UASNs移動錨點輔助定位具有重要借鑒意義。在UASNs傳感器節點定位時可使用自主式水下潛器(Autonomous Underwater Vehicle, AUV)充當移動錨點進行輔助定位。水下環境特點使得UASNs定位有3個突出問題:時鐘異步、分層效應、傳感器節點移動。面對UASNs定位問題,已有學者就AUV輔助UASNs定位問題取得部分研究成果如文獻[7-11]等,而對于AUV路徑規劃研究較少。現有AUV輔助UASNs節點定位的路徑規劃方案以靜態路徑規劃為主,如柵格軌跡、螺旋軌跡[7]、基于區域確定的移動錨點定位算法(Localization algorithm assisted by Mobile anchor node and based on Region Determination,LMRD)[12]。同時,部分WSNs移動錨節點輔助定位的靜態路徑規劃方案被廣泛應用于A U V輔助UASNs節點定位中,如掃描算法(Scan)、復合掃描(Double-Scan)、希伯爾特算法(Hilbert)[2]、基于三邊測量的移動錨點定位算法(Localization algorithm with a Mobile Anchor node based on Trilateration, LMAT)[13]等。由于AUV能量受限,當UASNs監視區域過大時使用靜態路徑規劃,AUV能量將難以兼顧定位精度與定位率。AUV輔助定位中AUV路徑影響UASNs節點定位的精度[14],其定位誤差的方差與幾何精度因子成正比,而幾何精度因子取決于目標傳感器的位置和移動錨點路徑[15]。由于UASNs節點的位置未知,使得難以規劃出理想幾何精度因子的路徑。另外,定位率受錨點密度與覆蓋范圍影響,提高錨點密度和覆蓋范圍必增加AUV的能量損耗。
使用AUV對UASNs進行數據收集同樣受嚴格的能量約束[16]。針對能量約束問題,有學者對UASNs數據收集的AUV路徑規劃做出研究如文獻[17-19]。這對于UASNs中AUV輔助定位的路徑規劃同樣具有重要借鑒意義。但對UASNs進行數據收集的路徑規劃與AUV輔助定位的路徑規劃又存在以下區別:(1)訪問次數不同。收集所有UASNs傳感器節點的數據,只需對所有傳感器節點訪問1次,即在路徑規劃中只要AUV出現在每個傳感器節點通信范圍內1次。AUV輔助定位中需要多次訪問每個傳感器節點。意味著,路徑規劃中每個傳感器節點通信范圍內AUV出現多次,提高了路徑規劃的難度。(2)是否已知傳感器節點位置不同。一些關于UASNs數據收集的路徑規劃算法是基于已知傳感器節點位置。而在AUV輔助定位算法中,在路徑規劃之前并不知道傳感器節點位置,提升了路徑規劃的難度。
面對上述問題,本文從信息熵的角度提出一種面向UASNs的AUV動態路徑規劃方法。信息能減少不確定性[20]。在UASNs傳感器節點定位場景中,本文將定位過程視為通過獲得信息增益,減少傳感器節點位置信息不確定性的過程。為方便對傳感器節點位置信息記錄和位置信息不確定性量化,將監視區域劃分為多個相同大小方塊。在路徑規劃時為了提高能量利用率,本文采用貪婪算法:選擇待選位置中期望信息增益與AUV能量損耗比值最大的位置作為AUV目標位置。最后,通過仿真驗證了本文方法的有效性。
2 動態路徑規劃基礎
本節主要介紹本文方法涉及的基本定義、從信息熵的角度對UASNs中的傳感器節點定位過程進行簡要分析。AUV輔助UASNs節點進行位置修正如圖1所示,由AUV在監視區域對應的水域廣播自身的位置信息輔助UASNs節點進行定位。在通信范圍內的UASNs節點接收信息,并反饋至AUV。
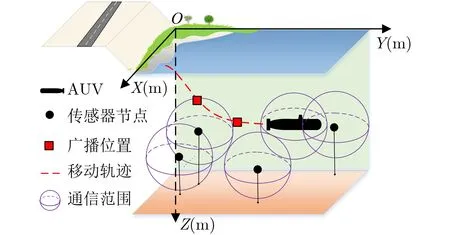
圖1 AUV輔助定位
2.1 基本定義
定義1 監測區域A為一塊長寬高都為L的正方體區域,本文將監測區域A劃分為多個單位方塊,每個方塊長寬高均為l。從零點開始依次從X,Y,Z3個坐標軸數值增加的方向對單位方塊進行編號,該編號為方塊唯一編號,方塊表示為ak,k為方塊編號。通過方塊編號和監視區域A的長寬高可以計算出方塊的位置。A為單元方塊的集合,其中包括了K個單位方塊,故A可以表示為A= {a1,a2,...,aK} 。其 中ak=[xk,yk,zk]T的xk,yk,zk分別表示方塊ak的中心位置在X,Y,Z3個坐標軸上的坐標。
定義2 感器節點V t= {v1t,v2t,...,vNt},其中,V t表示進行第t次位置信息更新之后所有傳感器節點的位置信息;vit={fit,Sit}表 示第t次位置信息更新之后傳感器節點i的定位信息,fit表示節點i定位狀態,取值為0, 1,分別表示未定位和已定位;Sit表示傳感器節點i進 行第t次更新之后可能位于的方塊集合,在下文稱為位置信息;N為布置傳感器節點個數。此外,傳感器節點i的真實位置記為pi=[xi,yi,zi]T, 其中xi,yi,zi分別表示傳感器節點i在X,Y,Z3個坐標軸上的坐標。
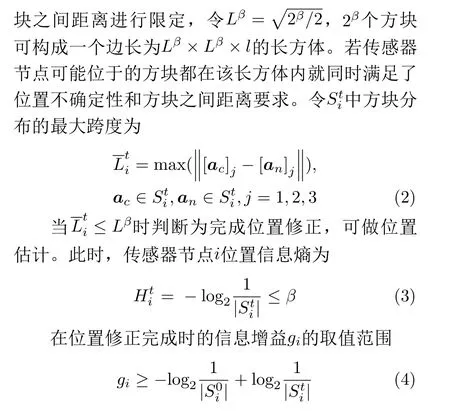
2.2 位置修正過程
3 面向水聲傳感網定位的AUV動態路徑規劃
本文方法定位和路徑規劃過程流程如圖2所示,AUV根據傳感器節點的位置信息進行動態路徑規劃和定位,直至所有傳感器節點完成位置修正。由于傳感器節點位置估計并非本文研究重點,故將傳感器節點位置的X,Y坐標值估計為其位置信息對應多邊形的中心位置坐標值,Z坐標軸上深度信息為已知量。
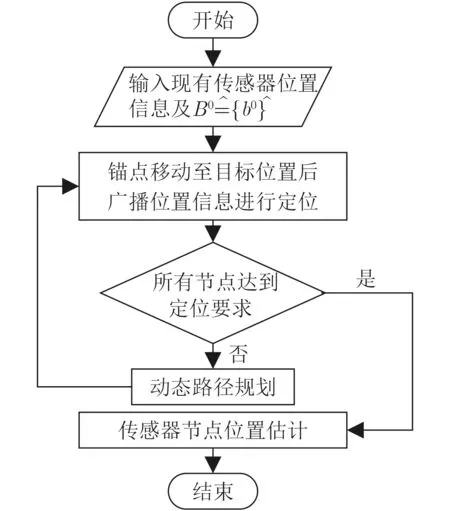
圖2 水下傳感器節點位置修正
3.1 傳感器節點定位
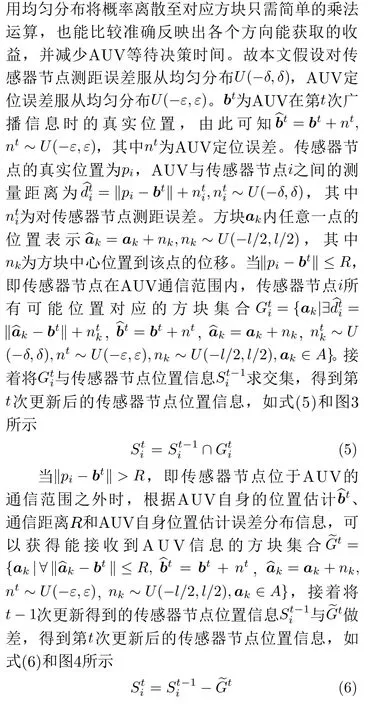
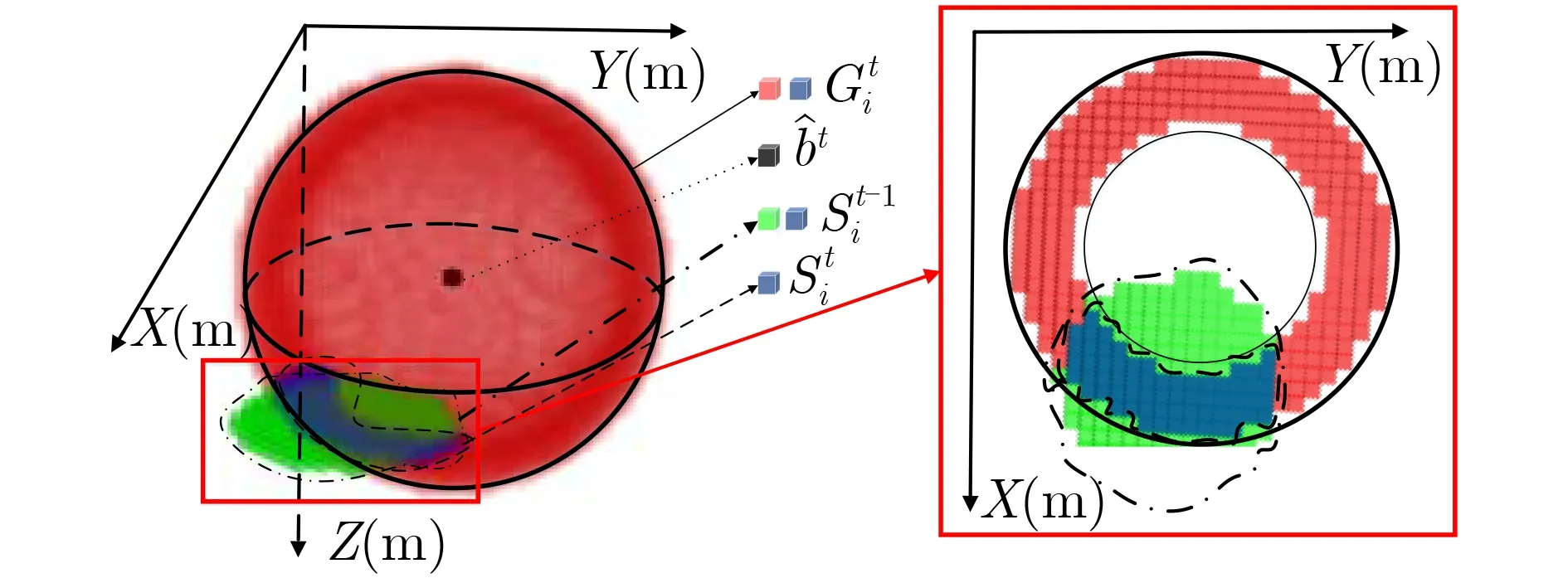
圖3 使用交集定位
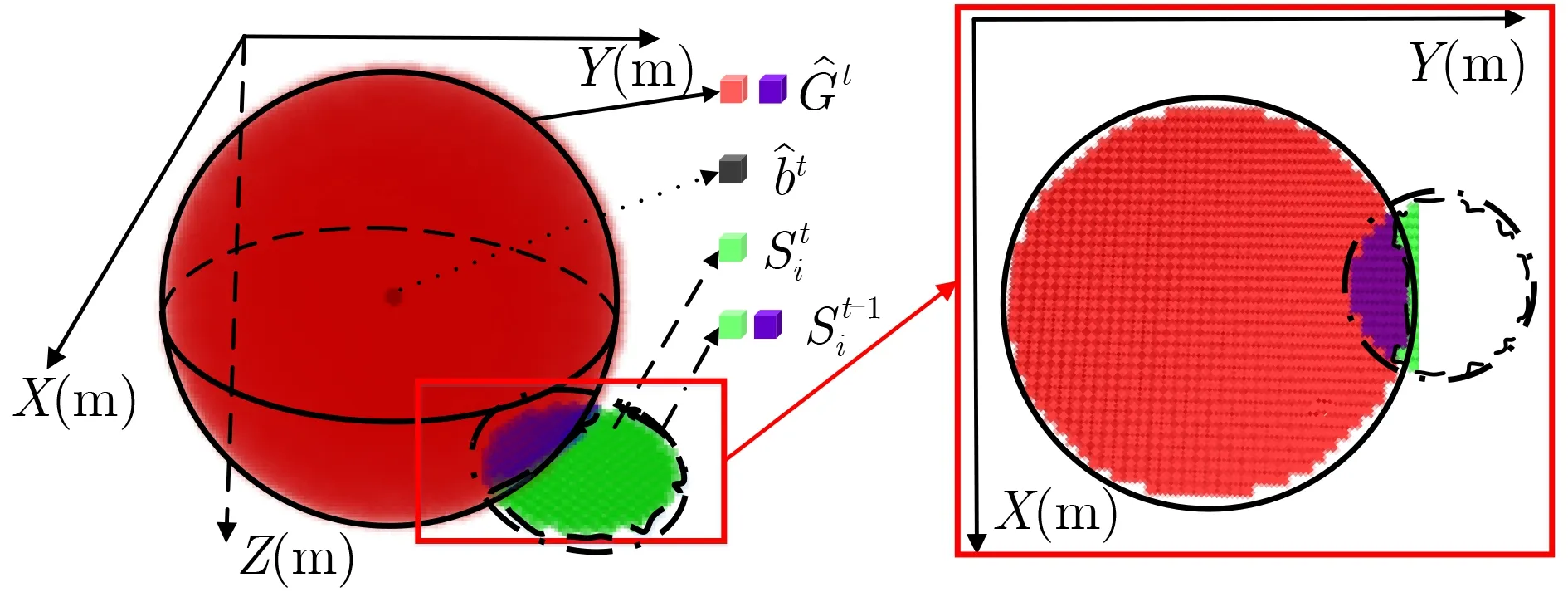
圖4 使用差集定位
3.2 AUV路徑規劃

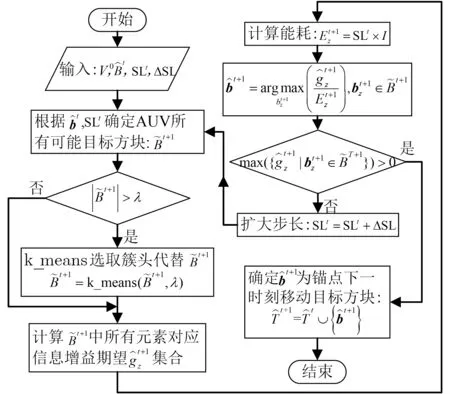
圖5 動態路徑規劃
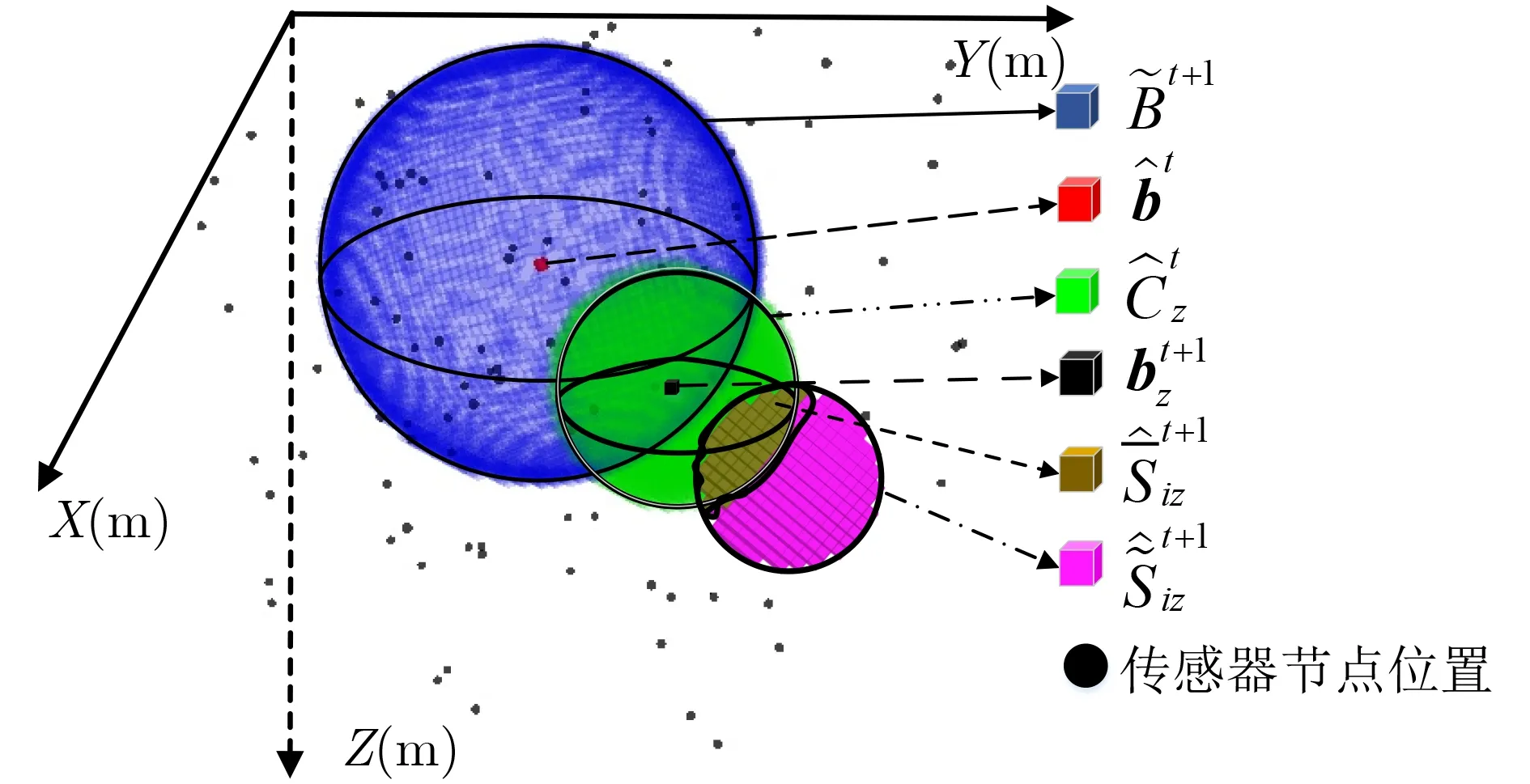
圖6 路徑規劃示意圖

本文方法通過循環執行3.1節的定位和3.2節的路徑規劃直至完成傳感網絡節點的定位。
4 仿真實驗

首先,在仿真實驗了本文方法在同一噪聲ε= 1,δ= 2不 同閾值β取值下的表現,并與SLMAT算法進行對比,仿真結果如圖7所示。在圖7中,本文方法在蒙特卡羅仿真中規劃路徑長度方面優于SLMAT算法;在定位精度方面能否優于SLMAT算法受β取值影響,β取值越大定位誤差越大。由2.2節可知,Lβ取值隨著β取值增加而增加。Lβ增加就降低了判斷是否完成位置修正的標準,故導致位置估計誤差增加,與此同時也減少了需要的虛擬錨點個數和規劃路徑長度。由圖7可看出,同時從定位誤差分布、規劃路徑長度和平均虛擬錨點個數多個方面看,在β= 4時本文方法表現與SLMAT最接近。故下文分析在β= 4,不同噪聲條件下本文方法的表現,并與SLMAT和MBL(ndc)算法進行對比。由表1可以看到MBL(ndc)算法定位誤差是本文方法和SLMAT算法的數倍,故在圖8(a)、圖9(a)、圖9(c)不做展示。同樣地,由于SLMAT算法規劃的路徑長度與噪聲無關,故在圖8(b)中不同誤差下的SLMAT不做區分。由于是在同一噪聲下進行實驗,故在圖7中不對噪聲取值展示。蒙特卡羅仿真結果如表1、圖8、圖9所示。
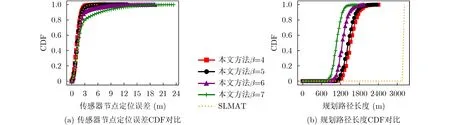
圖7 β不同取值下CDF對比

圖8 不同噪聲下CDF對比

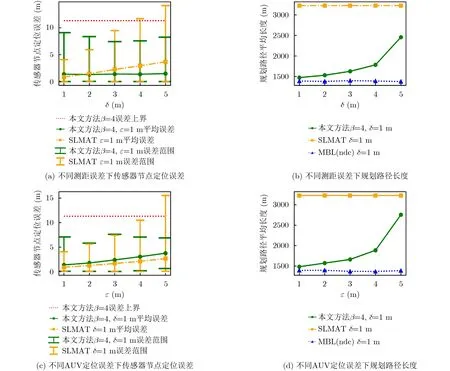
圖9 不同噪聲下統計結果
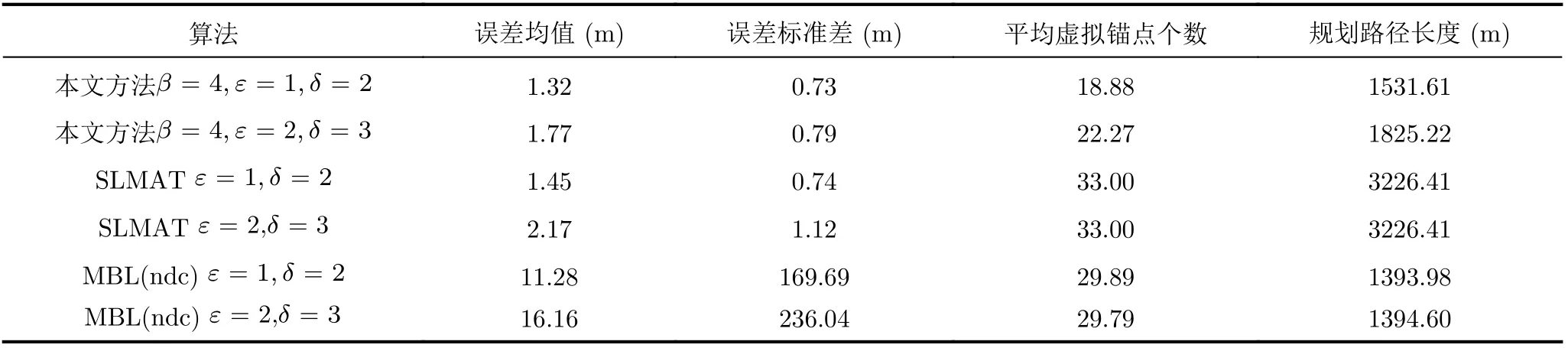
表1 統計學分析對比
通過上述仿真結果可以看到,本文方法在位置修正過程中兼顧了定位精度和能量利用率。因為本文方法提出是為了用于水下傳感器節點的位置修正,故本文在監測區域為L×L×L的3維環境下進行位置修正的蒙特卡羅仿真驗證。由于UASNs節點的深度信息可在本文所提動態路徑規劃方法和輔助UASNs節點定位時使用,以減少AUV移動能量消耗和提高定位精度。又因為暫未發現其他AUV輔助定位路徑規劃算法中利用到UASNs節點的深度信息,為保證展示結果公平性與展示有效性,故下文只展示本文方法結果。
通過圖10與對比圖7進行對比,可以發現不同的β取值下,傳感器節點定位誤差和為AUV規劃路徑長度變化趨勢與2維仿真結果一致。同時,通過圖11(a)、圖11(c)可以看到定位誤差也未超出誤差上界。通過表2、圖10、圖11與表1、圖8、圖9進行對比可以看出在噪聲增加時,傳感器節點定位誤差和為AUV規劃路徑長度的變化趨勢與2維仿真中的表現一致。
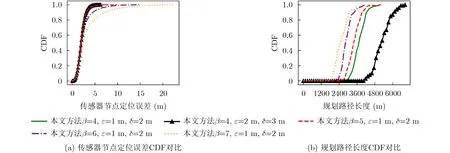
圖10 3維下CDF對比
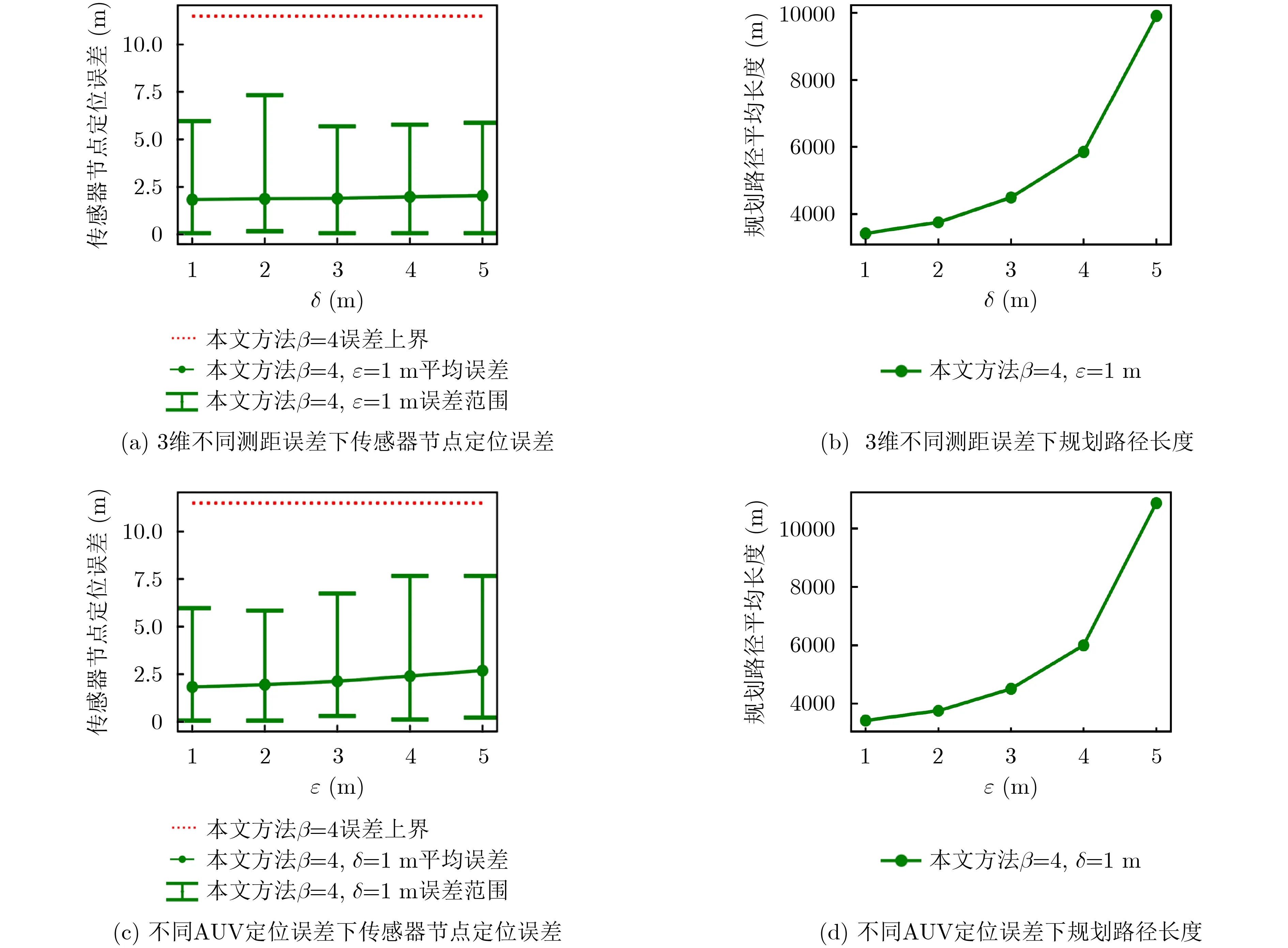
圖11 不同噪聲下統計結果

表2 統計學分析
5 結論
本文使用信息熵對傳感器節點位置信息不確定性進行描述。為方便對傳感器節點位置信息熵的表示和位置信息記錄,本文將監測區域分割成方塊。在此基礎上,對傳感器節點進行位置修正、根據信息增益期望和AUV移動預計能量損耗進行路徑規劃。最后通過仿真實驗證明本文方法能在保證定位精度的基礎上提高AUV能量利用效率。此外,本文方法能根據定位精度要求自動調整虛擬錨點個數,具有自適應性。
猜你喜歡
公民與法治(2020年11期)2020-07-25 02:02:06
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中華手工(2017年2期)2017-06-06 23:00:31
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
中國工程咨詢(2016年4期)2016-02-14 07:28:28
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32