基于多源數(shù)據(jù)同步的駕駛?cè)藨?yīng)急反應(yīng)及時(shí)性分析
2022-06-22 13:02:26宋耀鑫李平凡
中國(guó)司法鑒定 2022年3期
嚴(yán) 永,宋耀鑫,李平凡,魏 然
(公安部交通管理科學(xué)研究所 道路交通安全公安部重點(diǎn)實(shí)驗(yàn)室,江蘇 無錫214151)
道路交通事故處理經(jīng)常會(huì)遇到一類問題——駕駛?cè)嗽谑掳l(fā)前的應(yīng)急反應(yīng)是否及時(shí)、有無盡到“安全義務(wù)”。該問題對(duì)科學(xué)分析事故致因、合理認(rèn)定事故責(zé)任十分關(guān)鍵。針對(duì)“行人突然闖出、非機(jī)動(dòng)車突然闖出”等典型事故,由于駕駛?cè)藨?yīng)急反應(yīng)及時(shí)性分析缺少技術(shù)支撐,導(dǎo)致事故處理過程中判斷駕駛?cè)擞袩o盡到“安全義務(wù)”時(shí),往往是通過詢問駕駛?cè)耸掳l(fā)前的操作過程及結(jié)合車輛運(yùn)動(dòng)狀態(tài)進(jìn)行分析,具有較大的主觀性,其主要原因是無法綜合分析事故中各類數(shù)據(jù),以及缺少能夠?qū)︸{駛行為進(jìn)行準(zhǔn)確分析的相關(guān)方法。隨著車載視頻、車載數(shù)據(jù)記錄系統(tǒng)的普及,事發(fā)前駕駛?cè)瞬倏鼗厮葑兊靡子趯?shí)現(xiàn),為分析事故前駕駛?cè)藨?yīng)急反應(yīng)是否及時(shí)提供了必要的條件。基于此,本文根據(jù)事故中的車載數(shù)據(jù)、監(jiān)控等信息重建事故過程,標(biāo)記事故過程關(guān)鍵事件,在險(xiǎn)情避讓理論基礎(chǔ)上提出了事故中駕駛?cè)思皶r(shí)性判別方法。
1 多源數(shù)據(jù)同步方法
隨著信息化的快速發(fā)展,汽車行駛記錄儀、汽車事件數(shù)據(jù)記錄系統(tǒng)(Event Data Recorder,EDR)、監(jiān)控視頻等在交通事故處理中的地位逐漸提升。由于電子數(shù)據(jù)工作機(jī)制的不同,導(dǎo)致數(shù)據(jù)的采樣精度和頻率等存在差異,在事故處理過程中的使用率不高且使用深度不夠。以下將介紹交通事故中常見的幾種數(shù)據(jù)及多源數(shù)據(jù)的同步方法。
1.1 汽車行駛記錄儀數(shù)據(jù)
在《道路交通安全法實(shí)施條例》《道路運(yùn)輸車輛動(dòng)態(tài)監(jiān)督管理辦法》《機(jī)動(dòng)車運(yùn)行安全技術(shù)條件》(GB7258—2017)等法規(guī)標(biāo)準(zhǔn)的推動(dòng)下,公路客車、旅游客車、危化品運(yùn)輸車等重點(diǎn)車輛中行駛記錄儀的安裝使用率越來越高,為道路交通管理執(zhí)法、事故調(diào)查提供了有效的工具。
國(guó)家標(biāo)準(zhǔn)《汽車行駛記錄儀》(GB/T 19056)于2012年發(fā)布實(shí)施,該標(biāo)準(zhǔn)規(guī)定了汽車行駛記錄儀應(yīng)記錄車輛行駛速度、經(jīng)/緯度、制動(dòng)開關(guān)、燈光等信息。其中,車速信息中在車輛正常行駛時(shí),記錄的車速數(shù)據(jù)采樣頻率為每秒記錄1次,當(dāng)車輛行駛結(jié)束、斷電前等事件發(fā)生時(shí),車輛會(huì)觸發(fā)事件前20 s的事故疑點(diǎn)記錄,事故疑點(diǎn)記錄中的記錄頻次為0.2 s記錄1次,包含車速、經(jīng)緯度、制動(dòng)開關(guān)、燈光等信息。從汽車行駛記錄儀中導(dǎo)出的數(shù)據(jù)為VDR格式的數(shù)據(jù)包,需使用汽車行駛記錄儀專業(yè)解讀軟件進(jìn)行數(shù)據(jù)解讀。表1所示為解讀后得到的事故疑點(diǎn)數(shù)據(jù)示例,采樣頻率為5 Hz。

表1 汽車行駛記錄儀數(shù)據(jù)解讀結(jié)果示例
1.2 汽車事件數(shù)據(jù)記錄系統(tǒng)數(shù)據(jù)

表2 EDR數(shù)據(jù)解讀結(jié)果示例
1.3 多源數(shù)據(jù)同步方法
除了前文給出的汽車行駛記錄儀數(shù)據(jù)及EDR數(shù)據(jù),交通事故中還可能存在道路監(jiān)控視頻、車載視頻、筆錄等信息。數(shù)據(jù)采集途經(jīng)不同會(huì)引起數(shù)據(jù)的時(shí)間軸差異、采樣頻率不同等問題,單組數(shù)據(jù)通常單獨(dú)使用分析,缺乏時(shí)空耦合的關(guān)聯(lián)性分析,制約了數(shù)據(jù)的應(yīng)用深度。本文介紹的多源數(shù)據(jù)同步方法是基于特定事件標(biāo)記的同步方法,以采樣頻率最高的數(shù)據(jù)源的時(shí)間軸為參考,標(biāo)記特定事件(如停車、碰撞、制動(dòng)等),并以此特定事件發(fā)生的時(shí)間點(diǎn)為基準(zhǔn)時(shí)間,對(duì)齊其他數(shù)據(jù)源的時(shí)間軸。針對(duì)采樣頻率不同的多源數(shù)據(jù),以高采樣頻率數(shù)據(jù)為基準(zhǔn)時(shí)間軸,對(duì)低采樣頻率數(shù)據(jù)點(diǎn)進(jìn)行數(shù)據(jù)擬合。以行駛記錄儀、EDR、監(jiān)控視頻為例,行駛記錄儀事故疑點(diǎn)數(shù)據(jù)采樣頻率為每0.2 s采集一次,EDR車速數(shù)據(jù)一般為0.5 s采集一次,監(jiān)控視頻一般為0.04 s一幀。以監(jiān)控視頻時(shí)間軸為基準(zhǔn),將行駛記錄儀事故疑點(diǎn)中的車速數(shù)據(jù)、EDR車速數(shù)據(jù)擬合成采樣頻率25 Hz,其中車速的擬合方法是原始數(shù)據(jù)源中時(shí)間軸對(duì)應(yīng)差值,車速值按照加速度進(jìn)行擬合,得到多源數(shù)據(jù)同步結(jié)果,同步流程如圖1所示。

圖1 多源數(shù)據(jù)同步方法流程圖
根據(jù)同步流程,以行駛記錄儀事故疑點(diǎn)車速數(shù)據(jù)、EDR車速數(shù)據(jù)及監(jiān)控視頻為例進(jìn)行數(shù)據(jù)同步,同步后結(jié)果示例如表3所示。
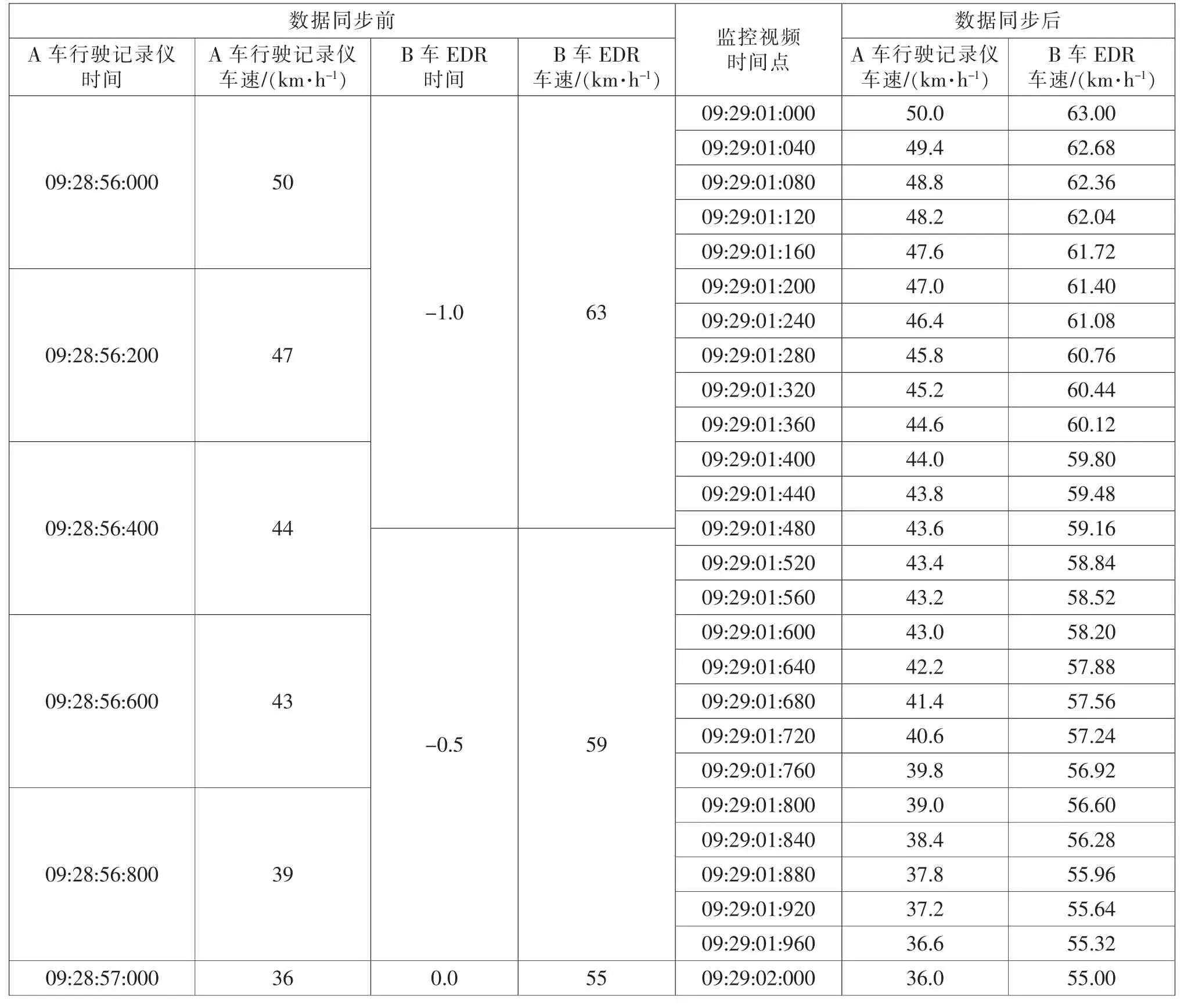
表3 數(shù)據(jù)同步后的結(jié)果示例
2 分析方法
車輛事發(fā)前行駛速度、駕駛?cè)瞬扇≈苿?dòng)時(shí)刻、險(xiǎn)情出現(xiàn)時(shí)刻等關(guān)鍵信息的獲取變得更加方便,為判斷駕駛?cè)藨?yīng)急反應(yīng)及時(shí)性提供科學(xué)依據(jù)。為推算駕駛?cè)嗽陔U(xiǎn)情出現(xiàn)時(shí)是否能夠及時(shí)采取制動(dòng)措施,本文從時(shí)間維度方面進(jìn)行探索,構(gòu)建駕駛?cè)藨?yīng)急反應(yīng)及時(shí)性判斷方法。
駕駛?cè)藨?yīng)急反應(yīng)時(shí)間包括兩部分:一是駕駛?cè)说母兄磻?yīng)時(shí)間(Perception-Reaction Time,PRT),具體包括感知時(shí)間、決策時(shí)間,以及開始采取措施所需時(shí)間(如將腳從加速踏板移至剎車踏板所需時(shí)間),在該時(shí)間段內(nèi),車輛仍將維持其原有運(yùn)行狀態(tài);二是駕駛?cè)瞬扇〈胧r(shí)間(Maneuver Time,MT),即車輛制動(dòng)減速至零時(shí)的所需時(shí)間。由于直接計(jì)算駕駛?cè)藨?yīng)急反應(yīng)時(shí)間時(shí),存在駕駛?cè)薖RT的個(gè)體差異性,因此提出如下假設(shè):駕駛?cè)嗽陔U(xiǎn)情出現(xiàn)時(shí)能夠采取及時(shí)緊急制動(dòng)措施并恰好能夠避免事故發(fā)生,從而計(jì)算出在該起事故中駕駛?cè)说腜RT,則駕駛?cè)薖RT計(jì)算方法如式(1)所示:

其中:為避免碰撞可用感知反應(yīng)時(shí)間;為駕駛?cè)藨?yīng)急反應(yīng)時(shí)間;為駕駛?cè)瞬扇〈胧r(shí)間。假設(shè)車輛制動(dòng)時(shí)為勻減速狀態(tài),計(jì)算方法是通過獲取制動(dòng)前車輛速度ν及車輛充分發(fā)出的平均減速度(Mean Fully Developed Deceleration,MFDD),計(jì)算方法如式(2)所示:

其中,ν=0。若車輛裝有汽車行駛記錄儀或EDR系統(tǒng),可據(jù)此獲取車輛行駛速度值,若存在事發(fā)前的監(jiān)控視頻,也可根據(jù)監(jiān)控視頻測(cè)算速度值。MFDD可采用機(jī)動(dòng)車路試制動(dòng)性能檢測(cè)的方式獲取,若車輛損壞無法進(jìn)行檢測(cè)時(shí),可使用同種型號(hào)車輛在相同場(chǎng)景下的測(cè)試結(jié)果。
最后,以計(jì)算所得駕駛?cè)薖RT是否符合一般人員的反應(yīng)能力來判斷應(yīng)急反應(yīng)是否及時(shí)。其中,若≤0,則表示沒有留給駕駛?cè)烁兄磻?yīng)時(shí)間。基于時(shí)間維度的分析方法流程如圖2所示。

圖2 基于時(shí)間維度的分析流程圖
3案例分析
為了更清楚地展現(xiàn)上述分析過程,使用實(shí)際案例進(jìn)行詳細(xì)闡述分析過程。
對(duì)于孔子已經(jīng)評(píng)價(jià)過的人物,司馬遷常常是直接采取孔子的評(píng)價(jià),例如稱吳太伯為“至德”,稱微子、箕子、比干為殷之“三仁”,稱董狐為“良史”,趙盾為“良大夫”,子產(chǎn)為“古之遺愛”。這些都是孔子已經(jīng)評(píng)價(jià)過的人物,司馬遷便因襲孔子的觀點(diǎn),直接以孔子的評(píng)價(jià)作為自己的評(píng)價(jià)。而對(duì)于孔子以后或者孔子所未評(píng)論到的人物,司馬遷也非常善于使用孔子留下來的概念來進(jìn)行評(píng)價(jià),如評(píng)價(jià)呂不韋為“聞”,評(píng)價(jià)萬(wàn)石、建陵、張叔為“君子”,評(píng)價(jià)田叔“居是國(guó)必聞其政”,這都是借用孔子留下的現(xiàn)成概念或標(biāo)準(zhǔn)來評(píng)價(jià)人物。由此我們可以看出,在評(píng)價(jià)歷史人物時(shí),孔子的評(píng)價(jià)標(biāo)準(zhǔn)也是司馬遷的重要價(jià)值尺度,甚至取舍褒貶都與孔子一致。
3.1 簡(jiǎn)要案情
2021年,一輛貨車在右轉(zhuǎn)彎時(shí)與一輛電動(dòng)自行車發(fā)生碰撞,造成人員傷亡。辦案單位提取到一段事故現(xiàn)場(chǎng)監(jiān)控視頻(幀率25 fps)和涉事貨車行駛記錄儀。
在事故調(diào)查中,需分析涉事貨車駕駛?cè)嗽陔U(xiǎn)情出現(xiàn)時(shí)能否及時(shí)采取制動(dòng)措施避免事故發(fā)生,另外,該起案件中不能僅僅以駕駛?cè)藨?yīng)急反應(yīng)及時(shí)性作為駕駛?cè)素?zé)任的認(rèn)定依據(jù),此次事故的責(zé)任認(rèn)定還需結(jié)合路口信號(hào)燈、兩車車速、駕駛?cè)耸欠裆嫦舆`法等其他因素進(jìn)行判斷。
3.2 數(shù)據(jù)分析
3.2.1 監(jiān)控視頻分析
通過對(duì)檢材監(jiān)控視頻進(jìn)行檢驗(yàn),得到事故過程中的關(guān)鍵事件如下(此部分出現(xiàn)的時(shí)間為監(jiān)控視頻畫面顯示時(shí)間):09:29:01第11幀涉事貨車車頭超過其左側(cè)車輛,可以觀察到行駛在人行橫道線上的電動(dòng)自行車(圖3(a));09:29:02第8幀兩車碰撞(圖3(b));09:29:05第1幀涉事貨車停車(圖3(c))。
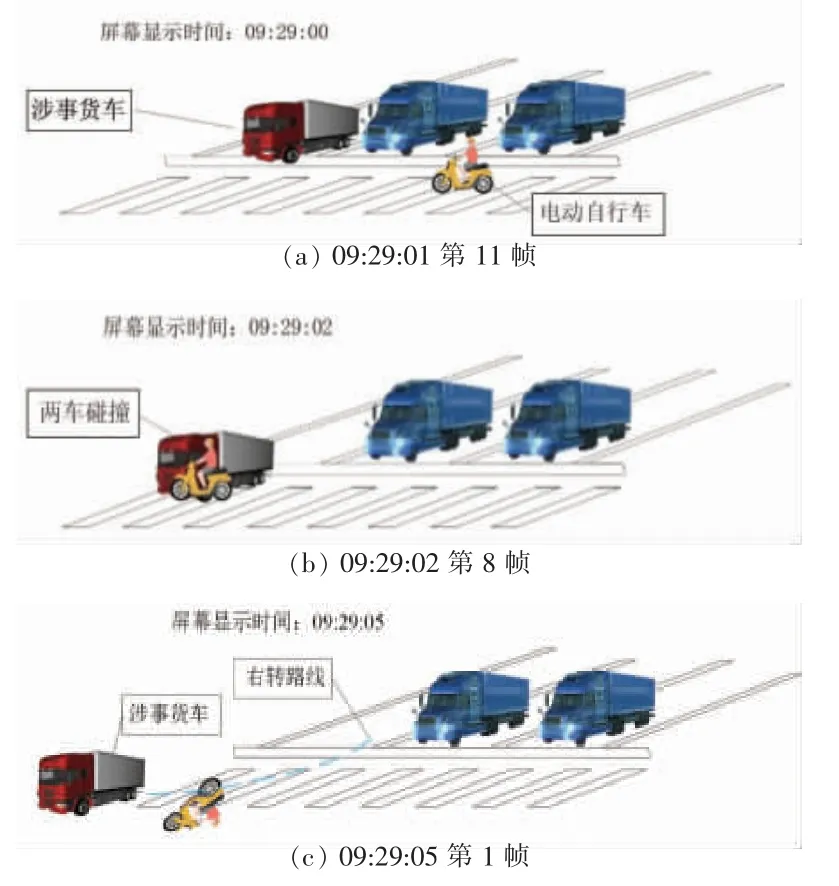
圖3 監(jiān)控視頻中事故過程示意圖
3.2.2涉事貨車行駛記錄儀數(shù)據(jù)分析
通過對(duì)涉事貨車行駛記錄儀進(jìn)行數(shù)據(jù)解讀可得到事發(fā)前車輛事故疑點(diǎn)數(shù)據(jù)中的車速值,具體如表4所示。

表4 涉事貨車行駛記錄儀車速數(shù)據(jù)
3.2.3 數(shù)據(jù)同步
由于監(jiān)控視頻與涉事貨車行駛記錄儀數(shù)據(jù)中的時(shí)間存在差異,監(jiān)控視頻幀率為25 fps,即幀間隔時(shí)間為0.04 s,行駛記錄儀中數(shù)據(jù)間隔0.2 s采樣,且兩種數(shù)據(jù)源的時(shí)間存在誤差,在進(jìn)行駕駛?cè)藨?yīng)急反應(yīng)及時(shí)性分析前對(duì)獲取的數(shù)據(jù)進(jìn)行時(shí)間同步。本案中,以監(jiān)控視頻中涉事貨車停車時(shí)刻(09:29:05第1幀)為基準(zhǔn)時(shí)刻,此時(shí)行駛記錄儀數(shù)據(jù)中車速為0(09:29:13:800)。基于此,倒推監(jiān)控視頻中涉事貨車停車前每一幀的車速,并以車速值計(jì)算下個(gè)采樣點(diǎn)的加速度,根據(jù)加速度計(jì)算拉伸后時(shí)間軸上每點(diǎn)的速度值,使得行駛記錄儀數(shù)據(jù)的采樣頻率與監(jiān)控視頻保持一致,具體如圖4所示。

圖4 行駛記錄儀數(shù)據(jù)與監(jiān)控視頻時(shí)間同步
3.3 應(yīng)急反應(yīng)及時(shí)性
以檢材監(jiān)控視頻中涉事貨車車頭超過其左側(cè)車輛時(shí)刻09:29:01第11幀作為基準(zhǔn)時(shí)刻,并記為第0幀,據(jù)此測(cè)算關(guān)鍵事件時(shí)間間隔(圖5)為:涉事貨車車頭超過其左側(cè)車輛至兩車碰撞時(shí)間為0.88 s;兩車碰撞至涉事貨車車速為0時(shí),時(shí)間為2.72 s。

圖5 事故中關(guān)鍵事件時(shí)間間隔測(cè)算示意圖
根據(jù)涉事貨車路試制動(dòng)性能檢測(cè)結(jié)果,該車充分發(fā)出的平均減速度=5.6 m·s;根據(jù)同步數(shù)據(jù)可知涉事貨車在車頭超過其左側(cè)車輛時(shí)(視頻顯示時(shí)間:09:29:01第11幀)車速ν=25 km·h,則采取制動(dòng)減速至0時(shí)所需時(shí)間為:

可得=1.24 s。
提出假設(shè):涉事貨車駕駛?cè)嗽陔U(xiǎn)情出現(xiàn)時(shí)能夠采取及時(shí)緊急制動(dòng)措施并恰好能夠避免事故發(fā)生,則駕駛?cè)丝筛兄磻?yīng)時(shí)間根據(jù)式(1)計(jì)算,可得,=-=-0.36 s。
3.4 分析意見
針對(duì)涉事貨車駕駛?cè)嗽陔U(xiǎn)情出現(xiàn)時(shí)能否及時(shí)采取制動(dòng)措施,使得車輛在事故發(fā)生前停止的事項(xiàng)。經(jīng)分析可知:涉事貨車車頭超過其左側(cè)車輛,可以觀察到行駛在人行橫道線上的電動(dòng)自行車時(shí),涉事貨車駕駛?cè)瞬扇【o急制動(dòng)措施來避免事故發(fā)生的可用感知反應(yīng)時(shí)間為-0.36 s,即此時(shí)該車駕駛?cè)藷o法在險(xiǎn)情出現(xiàn)時(shí)采取緊急制動(dòng)措施來避免事故發(fā)生(一般駕駛?cè)朔磻?yīng)時(shí)間為0.5~2 s)。另外,此類事故的責(zé)任認(rèn)定還需綜合考慮路口信號(hào)燈、兩車車速、駕駛?cè)耸欠翊嬖诰岂{等其他因素進(jìn)行綜合判斷。
4結(jié)語(yǔ)
隨著科技的快速發(fā)展,事故中能夠獲取的數(shù)據(jù)向多樣化方向發(fā)展。針對(duì)事故處理中數(shù)據(jù)的使用深度不足的問題,本文從部分典型數(shù)據(jù)的記錄機(jī)制出發(fā),基于不同源數(shù)據(jù)之間的差異,以時(shí)間軸同步為基礎(chǔ),構(gòu)建多源數(shù)據(jù)同步方法。以多源數(shù)據(jù)時(shí)間同步為基礎(chǔ),從時(shí)間維度作為切入點(diǎn),研究了判斷駕駛?cè)藨?yīng)急反應(yīng)是否及時(shí)的分析思路,并通過案例應(yīng)用詳解分析流程。