電網(wǎng)調(diào)度智能對話機器人的系統(tǒng)架構(gòu)和關(guān)鍵技術(shù)研究
2022-06-15 09:06:16張雨璇沙立成王海霞王海云
電子設(shè)計工程 2022年11期
關(guān)鍵詞:智能
張雨璇,沙立成,王海霞,王海云,陳 茜
(1.國網(wǎng)北京市電力公司電力科學研究院,北京 100075;2.國網(wǎng)北京市電力公司,北京 100031)
伴隨著人工智能和人機交互技術(shù)的快速發(fā)展,對話機器人已成為目前智能聊天機器人的主要研究熱點和實現(xiàn)形式,并已在國防、軍事、商業(yè)、教育等諸多領(lǐng)域中體現(xiàn)出較高的應用價值,這對人機交互的智能化具有重要的現(xiàn)實意義[1]。但是目前大部分語音對話機器人都是通過模板匹配的方式從對話庫中搜索輸入語句得到相應的答案[2],這種基于機械模板匹配和搜索模板的模式已經(jīng)不能滿足人們?nèi)诵曰⒅悄芑男枨螅_發(fā)能準確理解語義和人類情感的語音對話機器人已成為該領(lǐng)域的必然趨勢[3]。為此研究了電網(wǎng)調(diào)度智能對話機器人的系統(tǒng)架構(gòu)和關(guān)鍵技術(shù),在現(xiàn)有機器人基礎(chǔ)上,設(shè)計了一種調(diào)度對話機器人,并使用聲紋識別技術(shù)對原型機器人中的主要對話模塊進行優(yōu)化研究。
1 系統(tǒng)架構(gòu)
從信息流角度看,信息處理的全過程是由低到高,在調(diào)度數(shù)據(jù)集成技術(shù)方面,由原始網(wǎng)絡(luò)分析模型生成和驗證,有效整合和綜合利用電力機器人運行信息,然后通過數(shù)據(jù)濾波獲得可靠的數(shù)據(jù)截面,實現(xiàn)電力機器人正常工作狀態(tài)的監(jiān)測,智能識別復雜事故,以及事故后分析處理,修復機器人并指導其正常工作,控制事故狀態(tài)恢復[4-6]。為了避免因決策失誤而造成的不安全因素,對機器人研制中各環(huán)節(jié)的精確度、合理性、可靠性和可用性等方面提出了更高的要求[7-9]。由于機器人需要與不同區(qū)域的基站進行溝通交流,完成相關(guān)的信息傳輸工作,為此設(shè)計了電網(wǎng)調(diào)度智能對話機器人的系統(tǒng)架構(gòu),如圖1 所示。
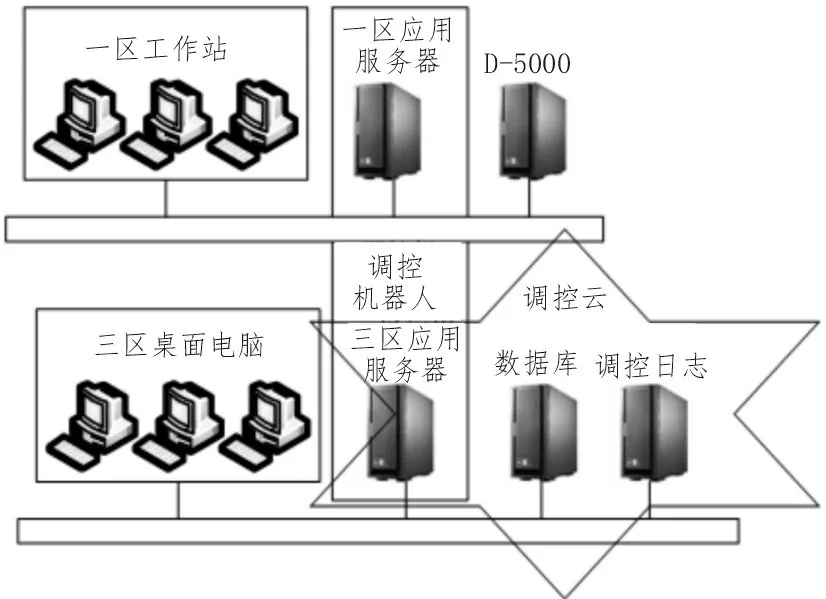
圖1 系統(tǒng)架構(gòu)
由圖1 可知,該系統(tǒng)主要是由應用服務(wù)器、工作站、調(diào)控云和調(diào)控機器人組成,其中一區(qū)應用服務(wù)器屬于機架服務(wù)器,用于解析和響應一區(qū)的語音服務(wù);三區(qū)應用服務(wù)器屬于調(diào)控云虛擬機,用于解析和響應三區(qū)的語音服務(wù);聲音采集設(shè)備用于收集語音信息[10-11]。
雖然一區(qū)與三區(qū)使用的是相同類型的機器人,但是針對不同的場景,起到不同的作用:
1)以D-5000 圖形為基礎(chǔ)構(gòu)建相對獨立的應用程序,完成廠站圖/網(wǎng)絡(luò)圖的調(diào)閱、設(shè)備定位等功能,同時可提供知識問答、聲紋識別等服務(wù)[12-14]。
2)三區(qū)是云SAAS 層管理應用,主要實現(xiàn)基于調(diào)控云的狀態(tài)查詢、調(diào)控日志、操作票等相關(guān)功能;此外,還需要完成三區(qū)的對話管理、知識庫管理和語音/語義模型培訓工作[15]。培訓結(jié)束后,機器人自動將新模型更新到三區(qū)應用服務(wù)器上,但是對于一區(qū)服務(wù),由于模型文件一般較大(大約20~30 GB),需要維護人員手動同步到一區(qū)服務(wù)器上,以避免因網(wǎng)絡(luò)傳輸量過大而造成阻塞。
1.1 M2M/M2C通信模塊
M2M 層是利用無線網(wǎng)絡(luò)與多個機器人互聯(lián),形成一個協(xié)同計算集群,其優(yōu)點是可以共享資源信息,將不同的計算單元組合在一起,提高了機器人的整體計算能力,使云網(wǎng)絡(luò)覆蓋范圍之外的機器人能夠參與信息交換。
M2C 層是云與機器人直接連接形成的計算集群,云中存儲了機器人完成任務(wù)的過程中記錄的動作行為、地圖、導航等資源信息,并隨著機器人完成任務(wù)的進程不斷地反饋更新[16]。
由于M2M/M2C 通信模塊中存在超級節(jié)點,因此M2M/M2C 通信模塊不需要路徑規(guī)劃和維護,適用于高動態(tài)機器人網(wǎng)絡(luò),減少了計算和存儲資源,降低了信息延遲,云端機器人能彈性分配資源并且將復雜的大數(shù)據(jù)量的計算任務(wù)轉(zhuǎn)移到云端,從而快速完成任務(wù)。
1.2 事故處理輔助決策模塊
事故輔助處理決策機器人協(xié)助調(diào)度員在事故中進行分析找出關(guān)鍵問題,協(xié)助調(diào)度員消除機器人越界,提供合理的事故處理參考方案。事故輔助決策過程包括從低層次到高層次的信息處理全過程,其基礎(chǔ)是IEC61970/CIM 架構(gòu),可按實際情況進行仿真,通過事故預想、故障診斷和事故后分析,提出智能對話機器人的事故處理方案。該機器人積極配合各種事故后分析工具,綜合分析事故后智能機器人的工作狀態(tài),同時,根據(jù)事故處理規(guī)則,為調(diào)度人員提供事故處理輔助決策。并且可以利用衍生功能實時處理智能對話機器人在無事故情況下的事故應急預案。
1.3 CIM虛結(jié)構(gòu)智能調(diào)度模塊
在CIM 虛結(jié)構(gòu)的基礎(chǔ)上,通過軟件開發(fā),各個異構(gòu)平臺之間實現(xiàn)了雙向的實體數(shù)據(jù)映射,除在線機器人中包含的關(guān)系庫結(jié)構(gòu)如OPEN3000、OPEN2000和SS40,異構(gòu)平臺中還包含有層次的庫結(jié)構(gòu),以及離線分析數(shù)據(jù)格式IEEE、BPA 以及CIM/XML/E 文件的模型,從而打通了聯(lián)機與離線分析的內(nèi)在界限。CIM 虛結(jié)構(gòu)智能調(diào)度平臺如圖2 所示。

圖2 CIM虛結(jié)構(gòu)智能調(diào)度平臺
如圖2 所示,除了常規(guī)的自動調(diào)度機器人平臺之外,還支持IEEE/BPA/XML 等常用的離線分析計算模型,打通了一般離線計算資源和實時機器人之間的數(shù)據(jù)連接,使之成為一種新的模式架構(gòu)。
1.4 機器人界面展示模塊
網(wǎng)調(diào)機器人應用程序的語音入口是電網(wǎng)調(diào)度智能對話機器人,即調(diào)控者通過語音控制網(wǎng)調(diào)機器人的各種應用程序,初步設(shè)計接口采用客戶展示和交互方式。該機器人運行在控制機器人安全一區(qū)或三區(qū)調(diào)度工作站上,其接口主要包括:
1)懸浮態(tài)
懸浮態(tài)作為智能對話機器人最常見的運行狀態(tài)之一,主要用于通過后臺程序?qū)崿F(xiàn)控制的調(diào)用方式,此時機器人界面只顯示少量信息或處于隱藏狀態(tài),而被控制應用則切換到前臺,按照指令進行操作。掛靠在機器人旁邊的小窗口主要包括語音播報、指令確認和文字錄入。
2)展示態(tài)
展示態(tài)主要應用于需要接收大量信息并以文字或圖表綜合顯示的情況,例如當查詢某一個月的負荷狀況時,可綜合顯示總體負荷變化曲線、分區(qū)負荷分布、分時負荷分布和表格數(shù)據(jù)等。
2 關(guān)鍵技術(shù)研究
2.1 對話檢索
對話檢索模塊以接收到的信息為輸入,按照信息的內(nèi)容安排相應的處理方式。利用BM25 模型檢索系統(tǒng)挖掘原始對話,抽取優(yōu)質(zhì)的單輪或多輪對話。BM25 是一種基于答案的文本評分算法,其基本思想是根據(jù)兩句話中各詞之間的相似度,再賦予各詞之間的權(quán)重,通過加權(quán)得分計算兩句話的相似度,具體公式如下:

式(1)中,i表示語句個數(shù),其取值范圍為[1,I]Q表示語句,d表示期望搜索語句,而語句Q中的詞q與期望搜索語句d之間的相似度應由權(quán)重w決定;根據(jù)文檔搜索頻率n,可計算獲取檢索速度,避免出現(xiàn)網(wǎng)絡(luò)時延。
2.2 設(shè)計對話的輔助調(diào)節(jié)流程
系統(tǒng)采用統(tǒng)一的信息化管理,根據(jù)目前智能對話機器人網(wǎng)絡(luò)拓撲結(jié)構(gòu)的變化,自動識別設(shè)備運行狀態(tài),根據(jù)季節(jié)等因素選擇合適的實時穩(wěn)定控制斷面和監(jiān)控范圍。因此,該文針對電力系統(tǒng)智能對話機器人在運行過程中因限電、人工維護不及時等因素造成的潛在風險,在其維護方式和機制上進行了創(chuàng)新。著重解決傳統(tǒng)操作模式運行速度慢、復雜性高的核心痛點問題,以聽覺圖像為基礎(chǔ)提供自然交互的用戶使用體驗,提高工作效率。利用如語音識別、語義理解、文本分析、知識檢索、語音合成、文檔生成等人工智能技術(shù),將語音輸入轉(zhuǎn)化為智能對話機器人調(diào)節(jié)指令,實現(xiàn)基于語音的輔助調(diào)節(jié)功能。
對話的輔助調(diào)節(jié)過程如下:收集并接收用戶輸入的語音信號,通過自然語言理解組件分析文本語義,對話管理人員根據(jù)所分析的語義信息,維護對話的歷史和當前狀態(tài),管理和控制整個對話流程。會話管理器檢索知識庫中存儲的領(lǐng)域知識,應答產(chǎn)生器根據(jù)會話管理器的會話策略生成會話文本、圖像,最終文本通過語音合成器渲染輸出;根據(jù)特定的命令調(diào)用外部調(diào)制器,實現(xiàn)電網(wǎng)調(diào)度的智能對話。
2.3 聲紋識別
采用聲紋和語音的雙重識別技術(shù)進行身份認證,提高登錄用戶識別的準確率,后續(xù)操作均與登錄用戶綁定,自動記錄每位調(diào)控員的工作狀態(tài)、行為和習慣等數(shù)據(jù),使智能助手可以更有效地提供服務(wù)。聲紋識別應用場景如圖3 所示。
由圖3 可知,通過聲紋的方式實現(xiàn)用戶快速登錄,避免輸入密碼的繁瑣操作,系統(tǒng)自動記錄登錄狀態(tài),并把之后一段內(nèi)的操作均與登錄用戶進行關(guān)聯(lián)。當調(diào)控人員進行重要操作前,例如確認操作票等,可以通過聲紋方式進行身份驗證,經(jīng)確認后方可執(zhí)行。
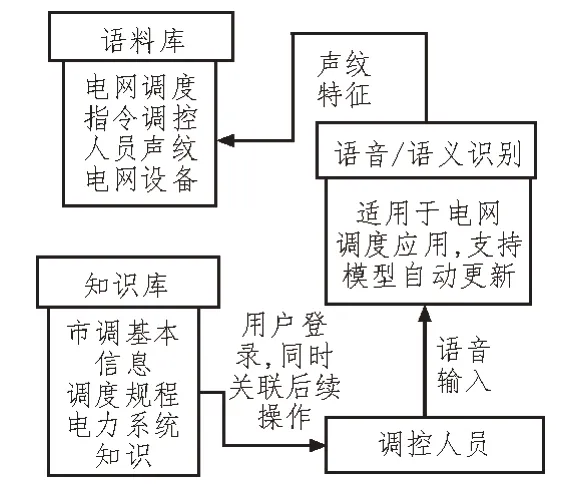
圖3 聲紋識別應用場景
3 實 驗
為了驗證電網(wǎng)調(diào)度智能對話機器人的系統(tǒng)架構(gòu)和關(guān)鍵技術(shù)研究合理性,分別使用傳統(tǒng)的機械模板匹配、搜索模板和聲紋識別技術(shù)進行實驗驗證分析。
3.1 實驗條件設(shè)置
利用電網(wǎng)調(diào)度智能對話機器人執(zhí)行電網(wǎng)調(diào)度任務(wù),采集調(diào)度信息為20 萬次,執(zhí)行采集任務(wù)獲取相關(guān)信息22 萬次。在該情況下,分析不同調(diào)度任務(wù)對話框彈出次數(shù),結(jié)果如表1 所示。
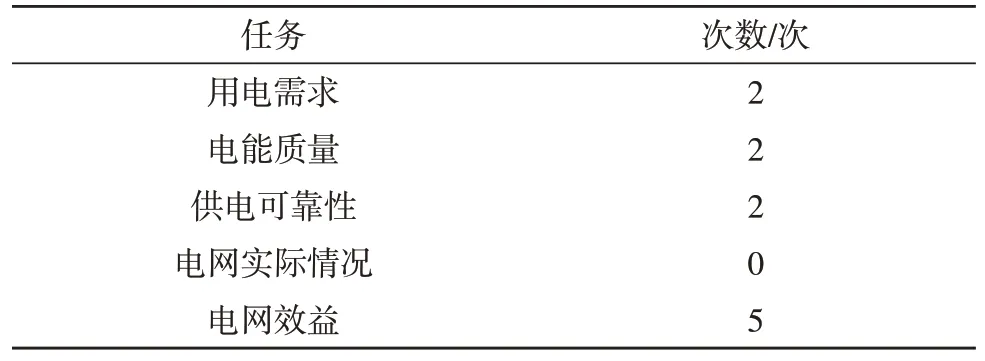
表1 不同調(diào)度任務(wù)對話框彈出次數(shù)
3.2 實驗結(jié)果與分析
3.2.1 對話資源搜索返回時間
理想情況下,電網(wǎng)調(diào)度智能對話資源搜索返回時間小于0.50 s,對比對話資源搜索返回時間結(jié)果如圖4 所示。
由圖4 可知,使用機械模板匹配技術(shù)和搜索模板技術(shù)在對話資源搜索時,均出現(xiàn)了不同程度的搜索時間延遲;使用聲紋識別技術(shù),無搜索時間延遲問題,所有的對話資源最終搜索返回時間均在0.50 s以內(nèi)。
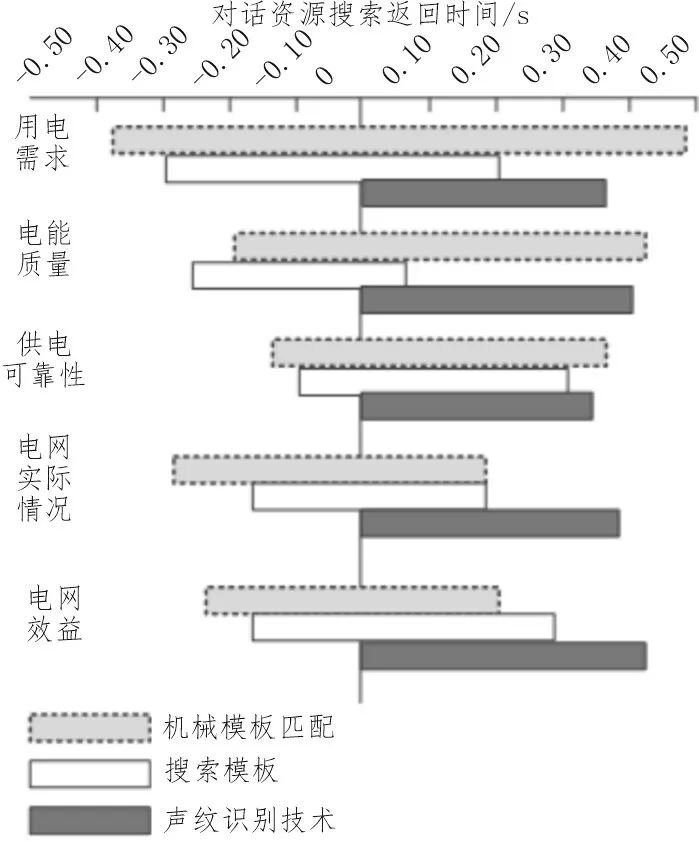
圖4 對話資源搜索返回時間對比分析
3.2.2 任務(wù)調(diào)度響應時間
理想情況下,自動調(diào)圖、狀態(tài)查詢、知識學習、問題解答等響應時間小于3.00 s,對比任務(wù)調(diào)度響應時間結(jié)果如圖5 所示。
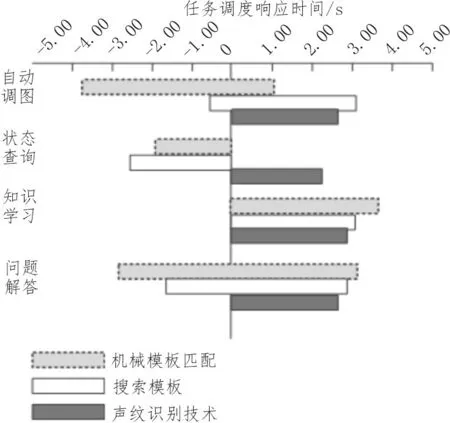
圖5 任務(wù)調(diào)度響應時間對比分析
由圖5 可知,使用機械模板匹配技術(shù)和搜索模板技術(shù)出現(xiàn)響應延遲問題,導致調(diào)度響應時間超出3.00 s;使用聲紋識別技術(shù),無響應時間延遲問題,所有的對話資源最終搜索返回時間均在3.00 s 以內(nèi)。
4 結(jié)束語
文中研究了基于知識庫的電網(wǎng)調(diào)度智能對話機器人,針對不同場景設(shè)計不同的應答技巧,使機器人擁有可擴展性。雖然使用該架構(gòu)文本相似度檢索技術(shù)具有應答響應時間短的優(yōu)勢,但也存在一定問題。未來電網(wǎng)調(diào)度功能可根據(jù)實際情況進行適當調(diào)整。如關(guān)鍵歷史信息的提取與保存、生成與整合,關(guān)鍵問題的解決與進一步融合,都是值得研究的課題。
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(shù)(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44