石油管道盜取定位中的時延估計算法
2022-06-11 06:33:55羅樂于玲
電腦知識與技術 2022年13期
羅樂 于玲

摘要:針對低信噪比環境下時延估計精度不足導致石油管道盜取定位不準確的問題,提出了一種PRLS自適應濾波時延估計算法。該算法首先利用主成分析法良好的降噪能力對信號進行預處理,接著對預處理后的信號進行最小二乘自適應濾波來進一步提高信噪比,然后對濾波后的信號進行二次互相關時延估計,最后進行三次樣條插值,能夠有效提升了算法在低信噪比環境下的魯棒性。仿真實驗表明,在信噪比為低于-10dB時,所提出的算法誤差不高于0.0995個采樣點,定位誤差不大于0.334千米,能夠獲得較為精確的石油管道盜取點的位置。
關鍵詞:時延估計;主成分分析;最小二乘自適應濾波;二次互相關
中圖分類號:TN911.7 ? ? 文獻標識碼:A
文章編號:1009-3044(2022)13-0109-04
時間延遲估計(TDE)是石油管道盜取定位中的基礎一環。在被動探測定位技術中,石油管道盜取定位通常利用石油管道周圍發生的異常事件信號到達兩個檢測器之間的時間差對盜取點進行定位。由此看出石油管道盜取點的定位誤差取決于時延估計的精確度。最簡單易行的方法是基本互相關法,但該算法在低信噪比環境下估計誤差較大。而廣義互相關法(GCC)[1-2]使用較為廣泛,更具實用性,性能優于基本互相關法。PHAT加權能使算法峰值更尖銳 [3-4],但也易受到噪聲的干擾。目前針對噪聲干擾對時延估計精度影響的問題,現有的時延估計改進方法有基于改進加權函數的廣義互相關法,在信號功率較小時也能得到尖銳的相關峰[5];快速二次相關時延估計法,能夠快速有效的估計出時延值[6];最小均方(LMS)自適應濾波時延估計算法,能有效地消除噪聲[7];基于三階累積量的時延估計算法,該算法有效地抑制了高斯噪聲的影響,在非高斯噪聲和相關噪聲的情況下,該算法也能獲得較好的估計性能[8];基于最大相關熵準則和拉格朗日分數延遲濾波器(FDF)的分數時延估計算法,該算法在高斯噪聲和脈沖噪聲環境下均有很好的性能[9];基于加權相關熵譜密度的時延估計算法,該方法基于相關熵理論,通過頻域加權處理進一步增強了算法的抗噪聲能力,在脈沖噪聲下效果良好[10];還有基于集合平均經驗模態分解(EEMD)濾波和二次相關時延估計[11]和基于最小二乘(RLS)自適應濾波算法的廣義互相關時延估計方法[12]等。這些算法均在一定程度上提高了時延估計算法的魯棒性。本文針對低信噪比環境下時延估計定位精度不足導致石油管道盜取定位不準確的問題,提出了一種PRLS自適應濾波時延估計算法。該算法能夠在低信噪比環境下,獲得具有較高精度的時延估計值,提高定位的精度。
1 自適應濾波時延估計算法
1.1基本信號模型
假設接收的兩路石油管道信號[x1n]和[x2n]模型為:
[x1n=sn+n1n] ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(1)
[x2n=sn-D+n2n] ? ? ? ? ? ? ? ? ? ? ? ? (2)
其中[sn]為源信號, D為時延差值,[n1n]和[n2n]為干擾噪聲。
1.2 RLS自適應濾波時延估計算法
對輸入信號[xin]進行RLS自適應濾波[13]得到輸出信號[yin]:
[yin=ωiTnxin] ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (3)
其中濾波系數為[ωin]。
則輸出信號[yin]與期望信號[Din]之間的誤差[ein]為:
[ein=yin-Din] ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(4)
其中遺傳因子[λ]是小于1并且接近1的數,誤差平方[ζin]與誤差[ein]的關系表示為:
[ζin=k=1nλin-kei2k] ? ? ? ? ? ? ? ? ? ? ? ? ? (5)
最后對兩路輸出信號[yin]做互相關求時延。
2 PRLS自適應濾波時延估計算法
在RLS自適應濾波時延估計算法基礎上,本文提出了PRLS自適應濾波時延估計算法,圖1為PRLS自適應濾波時延估計算法的原理圖:
該算法首先利用主成分分析法對信號進行預處理;接著,利用RLS自適應濾波對預處理后的信號進行降噪;然后,將降噪后的信號進行二次互相關的時延估計,并對二次互相關后的信號進行三次樣條插值;最后,峰值檢測得到時延值,進行定位。具體步驟如下:
2.1 PCA降噪
利用主成分分析法(PCA)將觀測信號中主分量(事件信號)選取出來,去除次分量也就是干擾信號和噪聲[14-15]。
首先對接收到的兩路觀測信號[x1n]和[x2n],[n=1,2,...,L],分別降噪q,重新排列得到[q×L-q+1]的觀測矩陣,構造觀測矩陣[XPin]:
[XPi=xP1xP2…xPL-q+1xP2xP3…xPL-q+2????xPqxPq+1…xPL] ? ? ? ? ? ? ?(6)
對觀測矩陣[XPi]去均值得到零均值矩陣[XPmi]:
[XPmi=XPi-xPi] ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (7)
再對零均值矩陣[XPmi]計算協方差矩陣[CPi],對[CPi]進行矩陣奇異值分解:
[CPi=UUT=U12-1/2UT] ? ? ? ? ? ? ? ? ? ? ? ? ?(8)
其中,[CPi]的奇異值分布[12]在對角線上,且按由大到小排列。
再選取前P個反映主要信號分量的奇異值,舍去后面較小的、反映噪聲干擾分量的奇異值,得到[012],獲得正交變換矩陣:
[C0=U012] ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (9)
即,降噪后的信號矩陣為:
[C0XPmi=U012XPmi] ? ? ? ? ? ? ? ? ? ? ? ? ? ? (10)
再通過選取矩陣[C0XPmi]的第一行和第一列排成新的列向量,即為降噪恢復后的信號[xP1n]和[xP2n]。
2.2 RLS自適應濾波
利用RLS自適應濾波對降噪恢復后的信號[xP1n]和[xP2n]進一步提高信噪比。可得到輸出信號[yPR1n]和[yPR2n]:
[yPRin=ωiTnxPin] ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(11)
其中[ωin]為濾波系數。
輸出信號[yPRin]減去期望輸出信號[Din]得到誤差[ein]:
[ein=yPRin-Din=ωiTnxPin-Din] ? ? ? ? ? ? ? ? ? (12)
則誤差平方[ζin]與誤差[ein]的關系為:
[ζin=k=1nλin-kein2=k=1nλin-kωiTnxPin-Din2] ? ? ? ? ? ? (13)
其中,[λi]為遺傳因子。當偏導數[ζin/ωin=0]時,可以得到誤差平方[ζin]的極值,其中的最小值點就是[ωin]的最優值,也就是最優濾波系數,代入式(11)便可得到最優濾波后的信號[yPR1n]和[yPR2n]。
2.3 PRLS自適應濾波時延估計算法
對RLS自適應濾波后的信號[yPR1n]和[yPR2n]做互相關[16],如式(14)所示:
[RPR12τ=EyPR1nyPR2n+τ] ? ? ? ? ? ? ? ? ? ? ? ?(14)
再對信號[yPR1n]做自相關,得到
[RPR11τ=EyPR1nyPR1n+τ] ? ? ? ? ? ? ? ? ? ? ? ? ?(15)
最后對[RPR11τ]與[RPR12τ]做二次互相關得到[RPRRRτ]。
[RPRRRτ=ERPR11nRPR12n+τ] ? ? ? ? ? ? ? ? ? ? ? (16)
假設噪聲為理想情況下的非相關高斯白噪聲,噪聲與信號也不具有相關性,可將信號與噪聲的相關函數也近似看成零,將式(14)、(15)代入式(16)可得:
[RPRRRτ=RPRRSτ+RPRRNτ] ? ? ? ? ? ? ? ? ? ?(17)
其中,[RPRRS·]為源信號做的二次互相關;[RPRRN·]為噪聲做的二次互相關。
同樣在理想情況下,可把[RPRRNτ]看成是零,即
[RPRRRτ=RPRRSτ-D] ? ? ? ? ? ? ? (18)
為得到非整數時延值,進一步提高時延估計精度,對信號[RRPRRτ]進行三次樣條插值[17]得到信號[RPRRRτ]。在[τ=D]時對插值后的信號[RPRRSτ-D]取最大值,利用[RPRRRτ]最大值對應的時間點估計時延。
采用基于雙馬赫-曾德爾干涉儀定位原理進行定位。震動發生的位置Z的計算公式為:
[Z=c?Dn] ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (19)
其中c為光速,n為光纖折射率。
3 仿真實驗
仿真條件:由于石油管道盜油檢測所用信號具有諧波特性,所以根據信號的特點用正弦信號疊加產生仿真信號,以5Hz為間隔進行疊加。設置盜油位置距檢測點39.732千米,時延為7.15個采樣點,即時延真實值為0.00029s。設采樣率為25000Hz,采樣點數為4000,觀測信號頻譜峰值為135Hz,20dB峰值帶寬為200Hz。PCA算法的觀測矩陣階數選擇100。
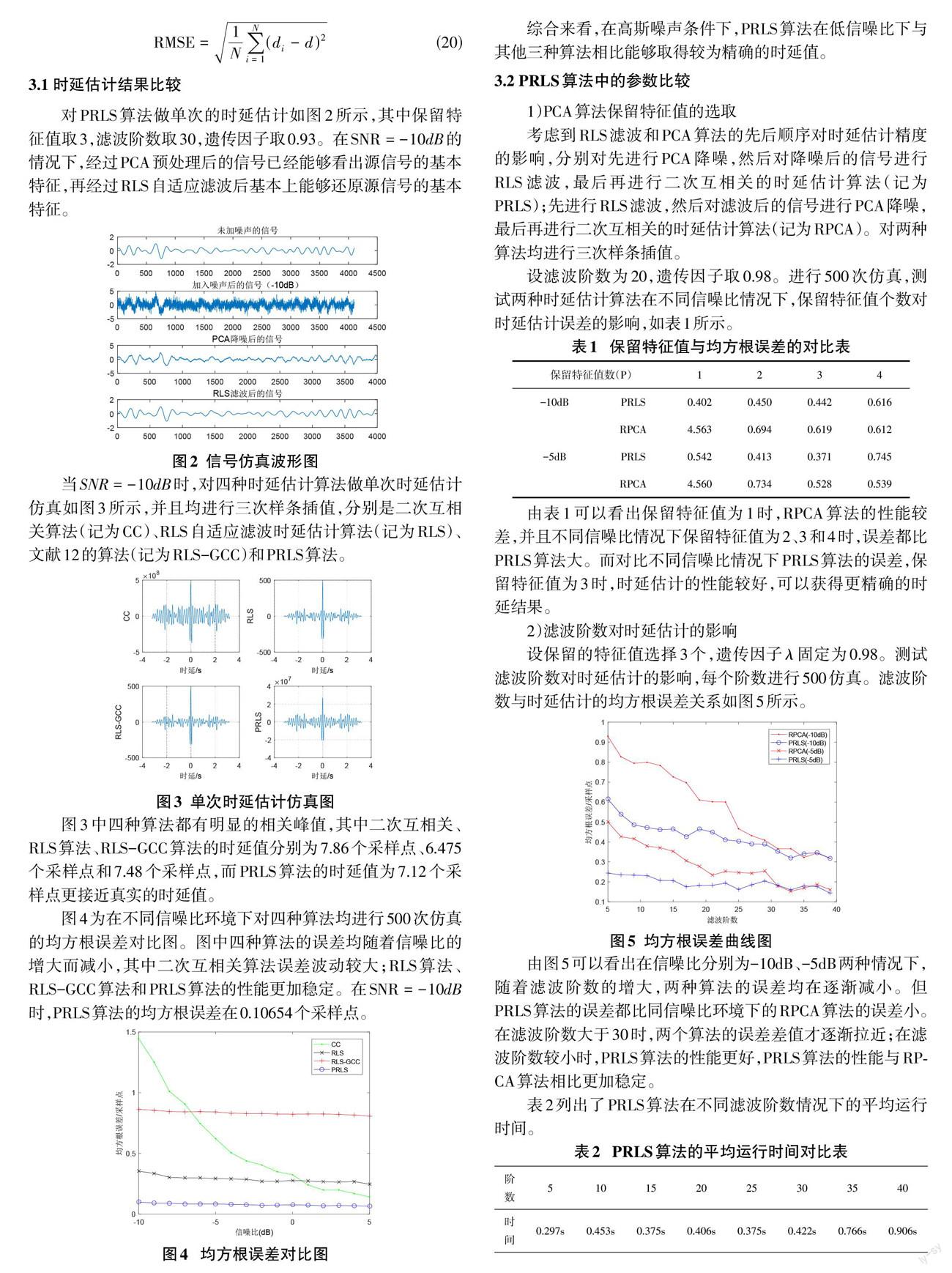
為驗證算法的性能,采用均方根誤差測試時延真實值與估計值的偏離程度,均方根誤差越小,說明得到的時延估計值越準確。設RMSE為均方根誤差,d為真實時延,di為時延的估計值,N為實驗次數,公式為:
[RMSE=1Ni=1N(di-d)2] ? ? ? ? ? ? ? ? ? ? ? ? ? (20)
3.1 時延估計結果比較
對PRLS算法做單次的時延估計如圖2所示,其中保留特征值取3,濾波階數取30,遺傳因子取0.93。在[SNR=-10dB]的情況下,經過PCA預處理后的信號已經能夠看出源信號的基本特征,再經過RLS自適應濾波后基本上能夠還原源信號的基本特征。
當[SNR=-10dB]時,對四種時延估計算法做單次時延估計仿真如圖3所示,并且均進行三次樣條插值,分別是二次互相關算法(記為CC)、RLS自適應濾波時延估計算法(記為RLS)、文獻12的算法(記為RLS-GCC)和PRLS算法。
圖3中四種算法都有明顯的相關峰值,其中二次互相關、RLS算法、RLS-GCC算法的時延值分別為7.86個采樣點、6.475個采樣點和7.48個采樣點,而PRLS算法的時延值為7.12個采樣點更接近真實的時延值。
圖4為在不同信噪比環境下對四種算法均進行500次仿真的均方根誤差對比圖。圖中四種算法的誤差均隨著信噪比的增大而減小,其中二次互相關算法誤差波動較大;RLS算法、RLS-GCC算法和PRLS算法的性能更加穩定。在[SNR=-10dB]時,PRLS算法的均方根誤差在0.10654個采樣點。
綜合來看,在高斯噪聲條件下,PRLS算法在低信噪比下與其他三種算法相比能夠取得較為精確的時延值。
3.2 PRLS算法中的參數比較
1)PCA算法保留特征值的選取
考慮到RLS濾波和PCA算法的先后順序對時延估計精度的影響,分別對先進行PCA降噪,然后對降噪后的信號進行RLS濾波,最后再進行二次互相關的時延估計算法(記為PRLS);先進行RLS濾波,然后對濾波后的信號進行PCA降噪,最后再進行二次互相關的時延估計算法(記為RPCA)。對兩種算法均進行三次樣條插值。
設濾波階數為20,遺傳因子取0.98。進行500次仿真,測試兩種時延估計算法在不同信噪比情況下,保留特征值個數對時延估計誤差的影響,如表1所示。
由表1可以看出保留特征值為1時,RPCA算法的性能較差,并且不同信噪比情況下保留特征值為2、3和4時,誤差都比PRLS算法大。而對比不同信噪比情況下PRLS算法的誤差,保留特征值為3時,時延估計的性能較好,可以獲得更精確的時延結果。
2)濾波階數對時延估計的影響
設保留的特征值選擇3個,遺傳因子[λ]固定為0.98。測試濾波階數對時延估計的影響,每個階數進行500仿真。濾波階數與時延估計的均方根誤差關系如圖5所示。
由圖5可以看出在信噪比分別為-10dB、-5dB兩種情況下,隨著濾波階數的增大,兩種算法的誤差均在逐漸減小。但PRLS算法的誤差都比同信噪比環境下的RPCA算法的誤差小。在濾波階數大于30時,兩個算法的誤差差值才逐漸拉近;在濾波階數較小時,PRLS算法的性能更好,PRLS算法的性能與RPCA算法相比更加穩定。
表2列出了PRLS算法在不同濾波階數情況下的平均運行時間。
表2中濾波階數在5到30之間時,算法的平均運行時間在0.3s~0.4s之間波動;在濾波階數大于30時,算法的平均運行時間從0.422s增加到了0.906s,運算時間大大增加。綜合算法的運算時間和均方根誤差來看,濾波階數取30較為合理。
3)測試遺傳因子對時延估計性能的影響
設保留的特征值選擇3個,濾波階數為30,因為遺傳因子是小于1且接近1的數,所以取[0.93≤λ<1]。圖6為兩種算法進行500次仿真的均方根誤差曲線圖。
從圖6可以看出,信噪比為-10dB和-5dB兩種情況下,遺傳因子小于0.98時,PRLS算法與RPCA算法相比誤差較小。信噪比為-10dB情況下遺傳因子為0.93時,PRLS算法的均方根誤差為0.096147個采樣點,而RPCA算法的均方根誤差為0.12679個采樣點,兩個算法之間的誤差差約0.03個采樣點。
綜合來看,在信噪比較低時,遺傳因子較小時算法的性能更好,與RPCA算法相比,PRLS算法也有較為明顯的優勢。對比上述可以看出,先對信號進行PCA預處理再進行RLS濾波的PRLS時延估計算法能夠達到更好效果。
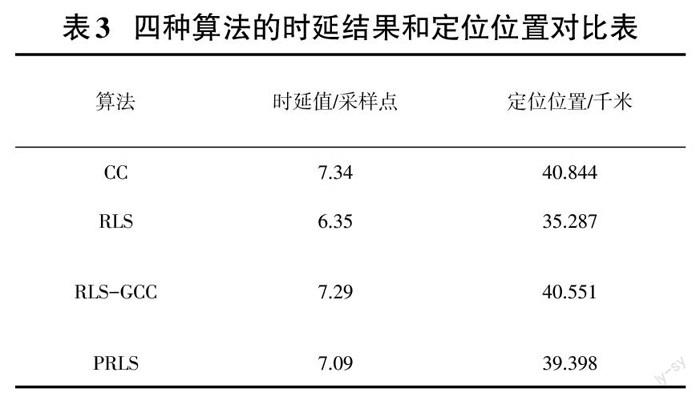
3.3石油管道盜取定位
光纖纖芯光速參考值為204079.277 km/s,光纖折射率為1.469。表3為四種算法在采集到的石油管道數據段中的時延結果和定位位置對比表。
對比表3中各個算法的時延值,PRLS算法的定位誤差為0.334千米,能夠獲得更精確的石油管道盜取點的位置。
4 總結
為改善低信噪比情況下,時延估計精度不足導致石油管道盜取定位不準確的問題,本文提出的PRLS自適應濾波時延估計算法,將PCA主成分分析法、RLS自適應濾波和二次互相關相結合,不僅利用PCA算法對信號進行預處理,RLS自適應濾波還對信號進一步降噪提高了信噪比。仿真實驗表明,該算法能在低信噪比下情況下取得較好的時延估計結果,表現出較好的魯棒性,能夠很好地定位石油管道盜取點的位置,同時也表明了算法的可行性,對實際應用具有一定的參考價值。
參考文獻:
[1] Chen L,Liu Y C,Kong F C,et al.Acoustic source localization based on generalized cross-correlation time-delay estimation[J].Procedia Engineering,2011,15:4912-4919.
[2] Liu Y,Tie Y,Li D,et al.Leak detection and location using generalized correlation time delay estimation algorithm[J].Advanced Materials Research,2012,482/483/484:1741-1746.
[3] Arifianto D,Wirawan,Atmaja B T,et al.Azimuth tracking of underwater moving sound source based on time delay estimation using hydrophone array[J].Procedia Engineering,2017,170:169-176.
[4] Rahman S A,Arifianto D,Dhanardono T,et al.Localization of underwater moving sound source based on time delay estimation using hydrophone array[J].Journal of Physics:Conference Series,2016,776:012075.
[5] 魏文亮,茅玉龍.一種改進加權函數的GCC時延估計方法研究[J].計算機仿真,2021,38(5):16-20,84.
[6] 竇慧晶,雷倩,程軍,等.基于三星定位快速二次相關時差估計算法研究[J].計算機仿真,2013,30(8):177-180.
[7] Xiong X L,Xu Y,Jiang L H,et al.Time delay estimation algorithm used in ultrasonic wind speed measurement system[J].Advanced Materials Research,2012,433/434/435/436/437/438/439/440:6457-6461.
[8] Meng X,Zhao D W,Ma S X,et al.Time delay estimation of AIS signal based on three-order cumulant[J].Wireless Communications and Mobile Computing,2018,2018:1349702.
[9] Yu L,Qiu T S,Luan S Y.Fractional time delay estimation algorithm based on the maximum correntropy criterion and the Lagrange FDF[J].Signal Processing,2015,111:222-229.
[10] Yu L,Qiu T S,Song A M.A time delay estimation algorithm based on the weighted correntropy spectral density[J].Circuits,Systems,and Signal Processing,2017,36(3):1115-1128.
[11] 謝含宇,王壽喜,郭喬,等.基于EEMD濾波和時延估計的次聲波法管道泄漏定位[J].油氣儲運,2020,39(10):1148-1154,1164.
[12] 王寶仁,曹明瑞.基于RLS自適應濾波算法的廣義互相關時延估計方法研究[J].組合機床與自動化加工技術,2020(6):27-31,36.
[13] Chu Y J,Mak C M.A new QR decomposition-based RLS algorithm using the split Bregman method for L1-regularized problems[J].Signal Processing,2016,128:303-308.
[14] 王海鵬,降愛蓮,李鵬翔.牛頓-軟閾值迭代魯棒主成分分析算法[J].計算機應用,2020,40(11):3133-3138.
[15] 閔鋒,葉顯一,張彥鐸.基于改進主成分分析網絡的手寫數字識別方法[J].華中科技大學學報(自然科學版),2018,46(12):101-105.
[16] 劉敏,曾毓敏,張銘,等.基于二次相關的語音信號時延估計改進算法[J].應用聲學,2016,35(3):255-264.
[17] 馬銳,賈學翠,張永康,等.基于三次樣條插值法的儲能鋰電池建模與參數辨識[J/OL].電源學報:1-16[2021-05-11].
【通聯編輯:唐一東】
