折疊翼飛行器設計與氣動仿真分析
2022-06-04 11:29:06張振鴻
兵器裝備工程學報 2022年5期
蔡 毓,張振鴻,劉 斌
(1.廣西大學 電氣工程學院, 南寧 530004; 2.廣西大學 計算機與電子信息學院, 南寧 530004)
1 引言
機翼撲動飛行的仿生飛行器具有高度仿生性和良好隱蔽性能。近年來,許多受飛行生物啟發(fā)的仿生撲翼機器人平臺被研制出來,昆蟲級微型撲翼機有蒼蠅,delfly等。鳥類作為常見的飛行動物也受到人們關注。機翼可變形的機器鳥是仿生撲翼飛行器研究的一個活躍領域。同時為提高撲翼機適應復雜場景穩(wěn)定飛行的能力,對仿生撲翼飛行器的氣動性能研究也顯得尤為重要。
對于仿鳥撲翼飛行器研究,德國Festo公司仿照海鷗飛行姿態(tài)研制出的Smartbird成功飛行,區(qū)別于以往的撲翼飛行器的機翼骨架結(jié)構(gòu),Smartbird將機翼分離成內(nèi)段翼和外段翼,使得機翼運動過程中可做兩段翅膀的運動形態(tài)不同變化。提出了內(nèi)段翼提供主要飛行升力,外段翼提供主要飛行推力理論。Lentink團隊研發(fā)出一種帶有真實鳥類羽毛并成功飛行的飛行器PigeonBot,通過風洞實驗和外場空中飛行,發(fā)現(xiàn)翅膀不對稱變形以及羽毛位置不同可以控制飛行方向,實現(xiàn)仿生飛行器在復雜環(huán)境中靈活飛行。昂海松團隊研究與設計多段柔性變體撲翼飛行器,探討了撲翼流場渦結(jié)構(gòu),總結(jié)升推力產(chǎn)生機理。楊永剛等采用近似柔段翼思想建立撲翼機模型,并對此模型進行氣動仿真實驗,為柔性翼多自由度撲翼機研制提供理論基礎。陳亮等通過優(yōu)化的葉素理論,對小型仿鳥飛行器在非常定流場條件下的氣動特性進行研究。
本文分析鳥類基本參數(shù)以及飛行姿態(tài)特征,設計具有“拍打-折疊”撲翼機構(gòu),建立三維折疊翼撲翼機模型,研制可折疊“鉸鏈式機翼”,實現(xiàn)機翼翼尖“8”字形運動軌跡,接近真實鳥類翅膀撲打狀態(tài)。利用CFD軟件對折疊翼撲翼機進行了低雷諾數(shù)非常定流場情況下氣動仿真模擬,分析折疊翼飛行器初始迎角,機翼展弦比和撲動頻率等對氣動特性作用。最終研制“羽毛版”可折疊機翼,此飛行器以撲動羽毛機翼產(chǎn)生動力,并成功起飛并持續(xù)飛行90多秒后安全著陸。
2 撲翼機機構(gòu)建模仿真
2.1 鳥類撲翼運動機理
文獻[12]通過對綠頭鴨飛行動作進行研究,將鳥類飛行姿態(tài)分為以下階段:
下?lián)潆A段:翅膀外翼翼尖從最高點運動到最低點的過程,全過程翅膀處于全展開狀態(tài)。
折彎階段:鳥類翅膀下降至最低處,外段翼相對內(nèi)段翼向下彎折。
上撲階段:鳥類翅膀外翼翼尖從最低點向上運動過程,整個過程鳥類整體成“M”字型,此時翅膀處于收縮狀態(tài)。
展平階段:鳥類翅膀外翼相對內(nèi)翼做舒展動作,外翼翼尖運動至最高點,整個翅膀全展開,準備進入接下來的下?lián)潆A段。
2.2 撲翼機建模
折疊翼撲翼機運動模型參考海鷗外形,并在其翅膀復雜運動的基礎上進行簡化,在Solidworks平臺上進行建模,設計如圖1所示骨架模型。該骨架模型包括主機身,尾翼,內(nèi)段翼和外段翼等,如圖1(b)。鳥身(包括尾翼)長1 045 mm,單邊翼展長約900 mm,其中內(nèi)段翼長320 mm,外段翼長約 580 mm,機翼平均幾何弦長280 mm。

圖1 骨架模型示意圖Fig.1 The diagram of skeleton model
2.3 撲翼機傳動機構(gòu)設計
撲翼機兩翼間撲打頻率,幅度,變化相位在保持飛行器飛行穩(wěn)定方面起到至關重要作用。在兩翼對稱拍打過程中,忽略環(huán)境因素的影響,受到的空氣對機翼產(chǎn)生的力矩是相當?shù)鹊摹7粗瑑梢黹g不對稱撲動,同時刻空氣對兩翼做功不同,產(chǎn)生滾轉(zhuǎn)力矩,導致?lián)湟頇C無法平穩(wěn)飛行。
采用雙曲柄雙搖桿機構(gòu),平面對稱傳動模式,如圖2所示。優(yōu)勢在于確保左右機翼運動保持一致,實現(xiàn)機翼對稱撲打。單邊曲柄使用4個M2沉頭螺釘將其固定在主齒輪,機翼通過曲桿與曲柄相連。電機轉(zhuǎn)動,通過減速比=1∶48的減速齒輪組,實現(xiàn)2個主齒輪相對圓周運動,帶動兩邊機翼的同時上下?lián)浯蜻\動。

圖2 雙曲柄雙搖桿機構(gòu)簡圖Fig.2 The diagram of double crank double rocker mechanism
2.4 機翼運動方程
分解鳥類翅膀復雜的運動形態(tài),建立機翼模型,可實現(xiàn)鳥類飛行過程中撲打-折疊動作。針對機翼運動模式,建立如圖3所示模型簡圖,點為齒輪圓心,表示曲柄,為曲桿,長度已知;四邊形為機翼的內(nèi)段翼,其中點為固定支撐點;表示外段翼,通過鉸鏈結(jié)構(gòu)與內(nèi)段翼相連。機翼內(nèi)段翼與外段翼運動軌跡方程,主要體現(xiàn)為,兩點。本文模型中所有桿子長度單位均為毫米。
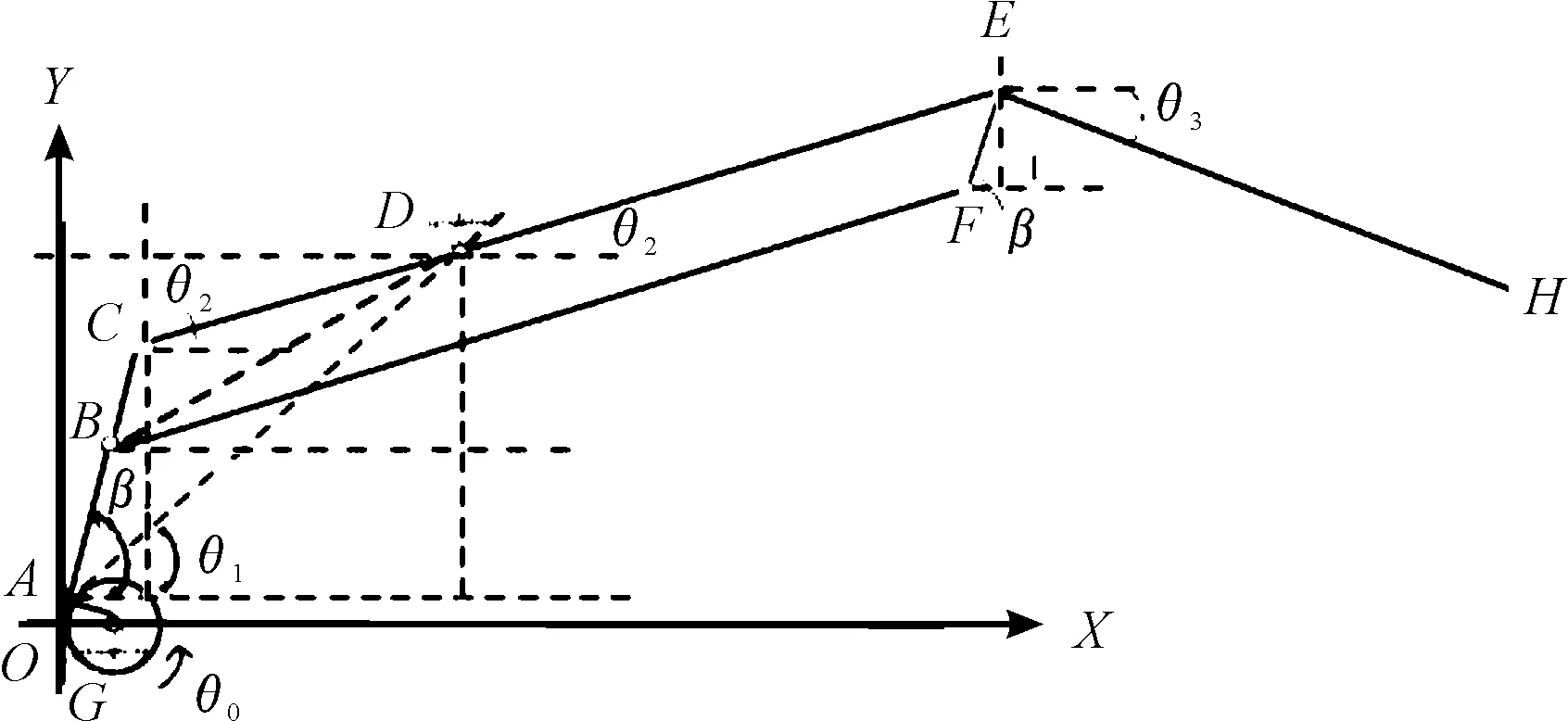
圖3 機翼模型簡圖Fig.3 The diagram of wing model
取軸設定為水平地面。設轉(zhuǎn)動角速度為rad/s,求得在任意時刻,曲柄轉(zhuǎn)動角度:
=
(1)
撲翼機內(nèi)段翼運動,求解對點運動軌跡:
(2)
(3)
幾何關系得出:
=+∠
(4)
根據(jù)幾何關系可知,為骨架上固定點,坐標為(,);點坐標(,0),則點坐標表示為
(5)
根據(jù)三角形余弦定理:
(6)
通過固定點與動點之間幾何關系:
(7)
聯(lián)立等式(2)—式(7),最終可求解出點的具體運動軌跡,確定內(nèi)段翼運動模式。同理,求解出點的坐標,將周期內(nèi)的坐標相連,確立外段翼運動軌跡。
四邊形為平行四邊形,對點:

(8)
=∠=90°-
(9)
(10)
聯(lián)立式(8)—式(10),可求得點運動軌跡。其中:為固定點至內(nèi)段翼最外側(cè)點間距離,為內(nèi)段翼最內(nèi)側(cè)點至定點間距離,為曲桿長度,為曲柄長度,為外段翼長度。
2.5 撲翼機運動仿真
根據(jù)2.4節(jié)推導出的撲翼機內(nèi)段翼與外段翼運動軌跡方程,對設計的機構(gòu)進行運動學求解。根據(jù)給定折疊翼機構(gòu)設計參數(shù):翼展長度,內(nèi)、外段翼長度,弦長參數(shù)。在機械運動約束條件下:曲柄長度:25 mm≤≤30 mm;曲桿長度:45 mm≤≤50 mm;搖桿長度:≤;固定支撐點與曲桿點距離:40 mm≤≤50 mm。實際飛行實驗期望機翼撲動幅度50°≤≤70°;撲翼機撲打頻率≥ 3Hz。在Solidworks平臺上對設計的撲翼機模型進行基本運動仿真及motion 分析。最終導出機翼運動軌跡,如圖4所示。

圖4 機翼運動軌跡圖Fig.4 Wing movement trajectories
機翼運動仿真路徑,內(nèi)段翼運動做相對簡單上下?lián)浯蜻\動,外段翼相對內(nèi)段翼具有折疊動作,軌跡曲線接近“8”字形運動,成功模擬真實鳥類撲翼運動的規(guī)律。
3 撲翼機氣動特性研究
3.1 三維氣動仿真平臺搭建
為了達到在運動狀態(tài)下,研究撲翼機機翼初始迎角,展弦比及機翼拍打頻率對氣動特性的影響,本文對23組不同機翼初始迎角,7組不同展弦比及5組不同拍打頻率對折疊翼飛行器進行三維氣動仿真實驗和數(shù)據(jù)分析。選取機翼初始迎角變化范圍在-10°~12°;模擬撲翼機展弦比為:1、1.5、2、2.5、3、3.2、4;模擬撲翼機機翼撲動頻率:2 Hz、3 Hz、4 Hz、5 Hz、6 Hz。在軟件平臺XFlow中選用虛擬風洞模式對折疊翼飛行進行氣動仿真,虛擬風洞基本設置參數(shù)如表1所示。
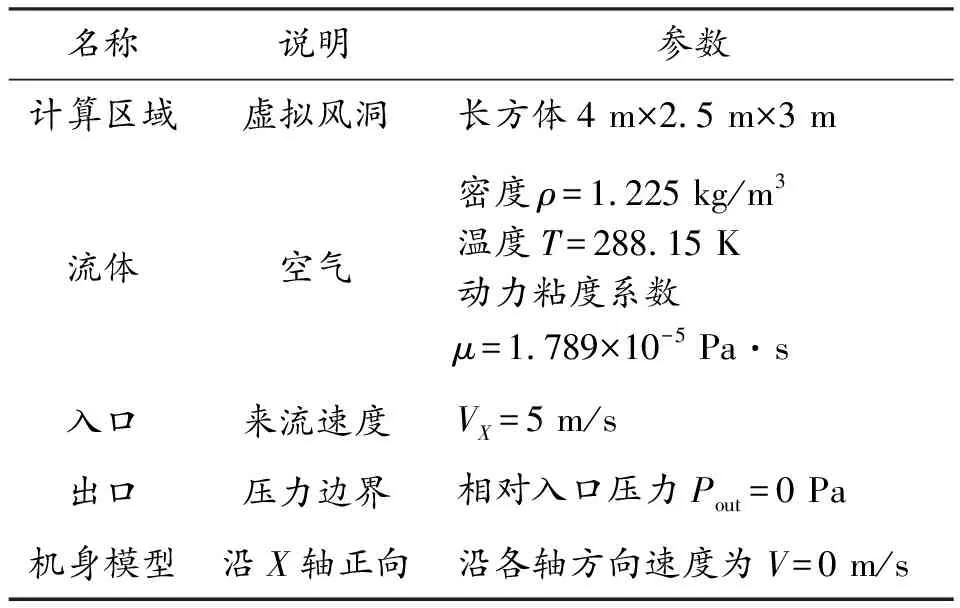
表1 虛擬風洞基本設置參數(shù)
3.2 撲翼機機翼初始迎角對氣動特性影響
本文以NACA7412翼型為計算模型,探討機翼初始迎角對氣動特性影響。以地面坐標系為基準,將機翼未開始運動,處于平放狀態(tài)下具有的迎角設定為初始迎角。通常情況采用無量綱數(shù)升力系數(shù),阻力系數(shù)衡量飛行器運動中受到的升力及阻力。在XFlow平臺下模擬不同機翼初始迎角下的,數(shù)據(jù),并進行數(shù)據(jù)處理,得到如圖5所示的曲線。選取初始迎角在-10°~12°,變化步長=1°,約束條件:來流風速為5 m/s,雷諾數(shù)設定為1.6×10。
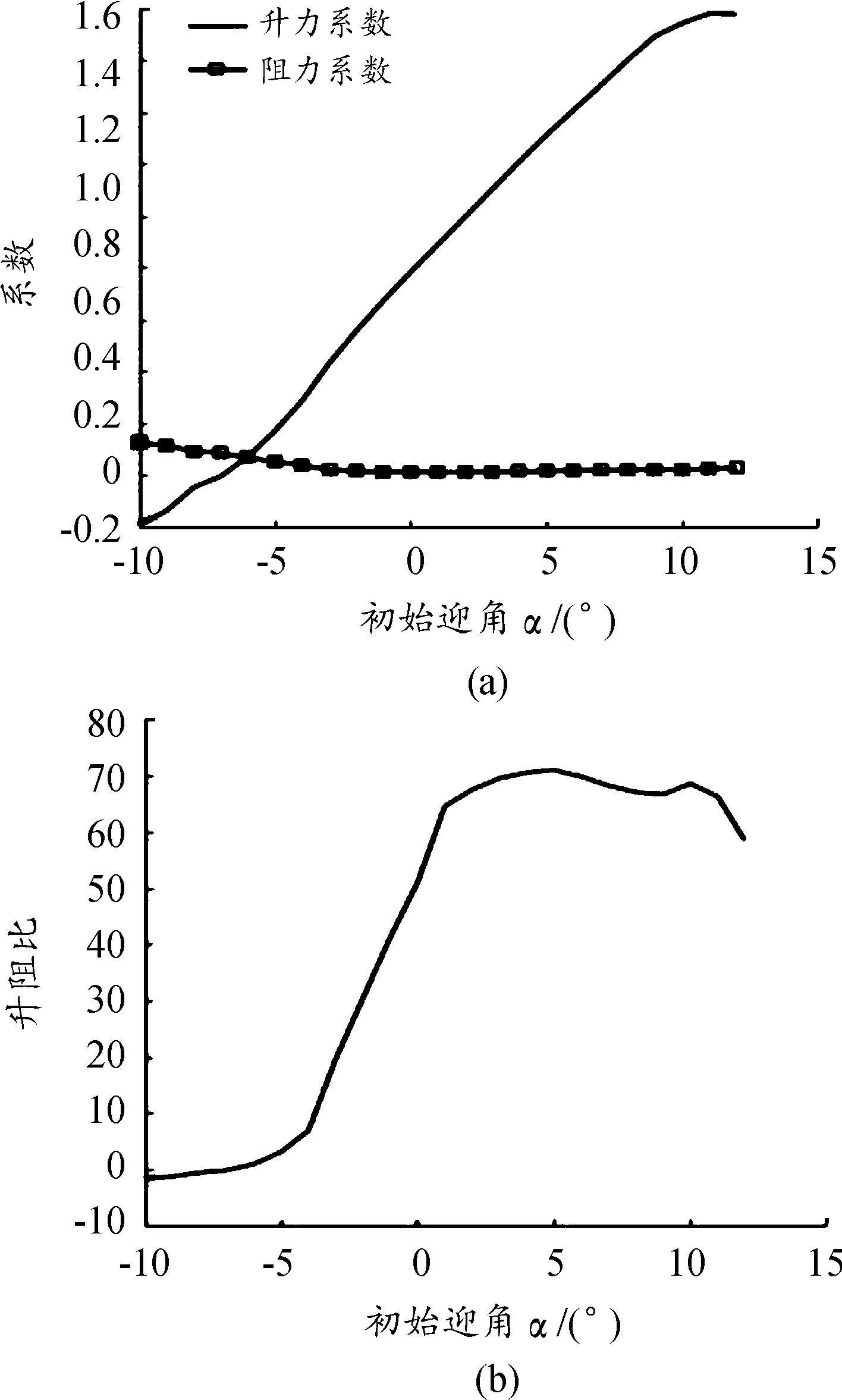
圖5 不同初始迎角下升力、阻力系數(shù)(a)與升阻比(b)變化曲線Fig.5 Curve of lift coefficient,drag coefficient (a) and lift-drag ratio at different initial wing angle(b)
由圖5(a)可以分析出,升力系數(shù)與機翼初始迎角成正比例關系。在機翼初始迎角為負值時,升力系數(shù)為負值,此時機翼撲動主要產(chǎn)生負升力,隨著機翼初始角度增加,升力系數(shù)變?yōu)檎担⒃龃蟆3跏加堑竭_-7°時,升力系數(shù)變?yōu)檎担藭r機翼撲動開始產(chǎn)生正向升力;阻力系數(shù)呈現(xiàn)隨初始角度增加先逐漸減小后增大的趨勢,圖5(b)中升阻比變化曲線存在多個拐點,體現(xiàn)為隨初始角度增大先增大后減小,再增大最后逐漸減小過程,同時在-5°后升阻比急劇增大,5°時升阻比達到峰值,隨后曲線變得平緩。有關數(shù)據(jù)如表2所示,取-10°、-5°、0°、1°、5°、10°不同初始迎角做比較。在1°時受到阻力最小,通過改變飛行器平飛階段翼面迎角,在該角度下受到最小空氣阻力;當撲翼機初始迎角為5°飛行時,獲得最大升阻比,在起飛階段,有助于快速升空。
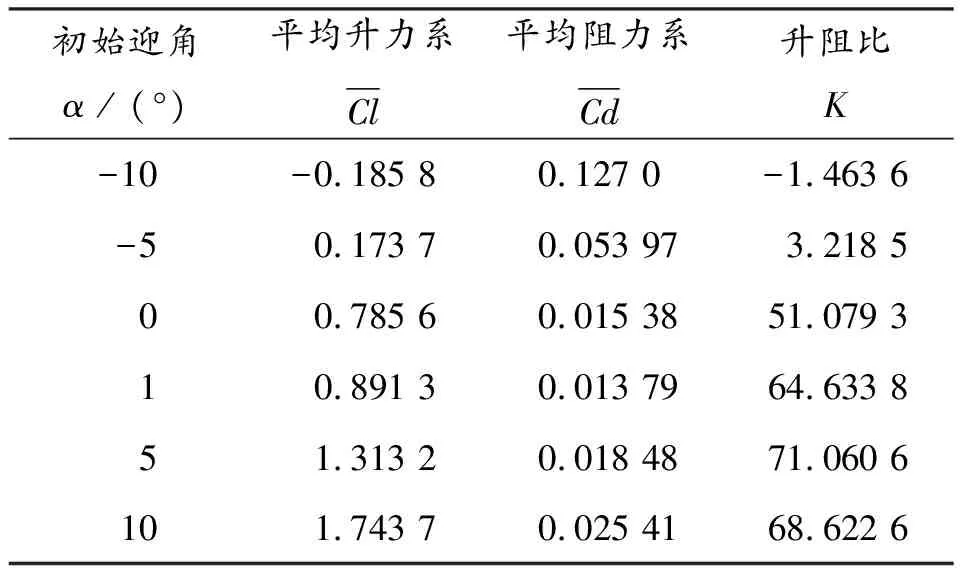
表2 不同初始迎角下平均氣動特性參數(shù)
3.3 機翼展弦比對撲翼飛行器氣動特性影響
簡化仿真模型,將內(nèi)段翼與外段翼簡化成一段機翼,取撲翼機左機翼為參照,改變機翼翼展,研究撲翼機展弦比為1、1.5、2、2.5、3、3.2、4對撲翼運動的影響。仿真時間為2 s,約束條件:來流速度為5 m/s,機翼撲打角度=60°,機翼撲動頻率為4 Hz,即一個運動周期=0.25 s,初始迎角為5°;機翼撲打滿足急回特性規(guī)律,即機翼一個運動周期內(nèi),向下?lián)鋭訒r間大于上撲時間,并根據(jù)文獻[12]指出撲翼運動近似正弦或者余弦變化規(guī)律。在XFlow中設定產(chǎn)生時間差的分段函數(shù)。撲翼機機翼一個周期內(nèi)撲打角度變化表達式如下:
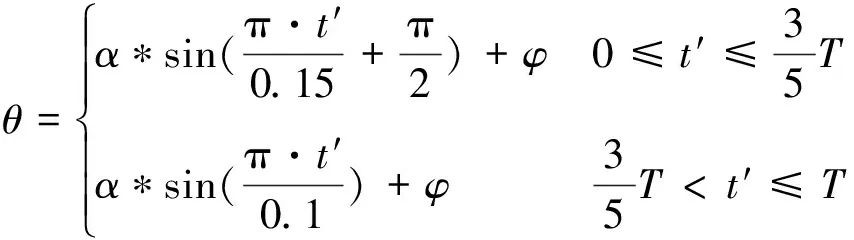
(11)
其中時間′可通過求余運算,如式(12)所示,實現(xiàn)機翼連續(xù)周期性運動。
′=-?」×
(12)
式中:為仿真實驗運行時刻,為運動周期。
為仿真實驗未開始時,機翼初始位置與水平面夾角,調(diào)整值可改變機翼初始位置,本文取=0°;為機翼翼尖撲動至最高(低)點,機翼平面與機翼初始位置平面夾角,本文取=-30°。聯(lián)立式(11)、式(12),求解出機翼撲動角度變化,如圖6所示。一個周期內(nèi),當角度變化斜率為正值,機翼為下?lián)洌瑫r間為0.15 s,角度變化斜率為負值,機翼上撲,時間為0.1 s。
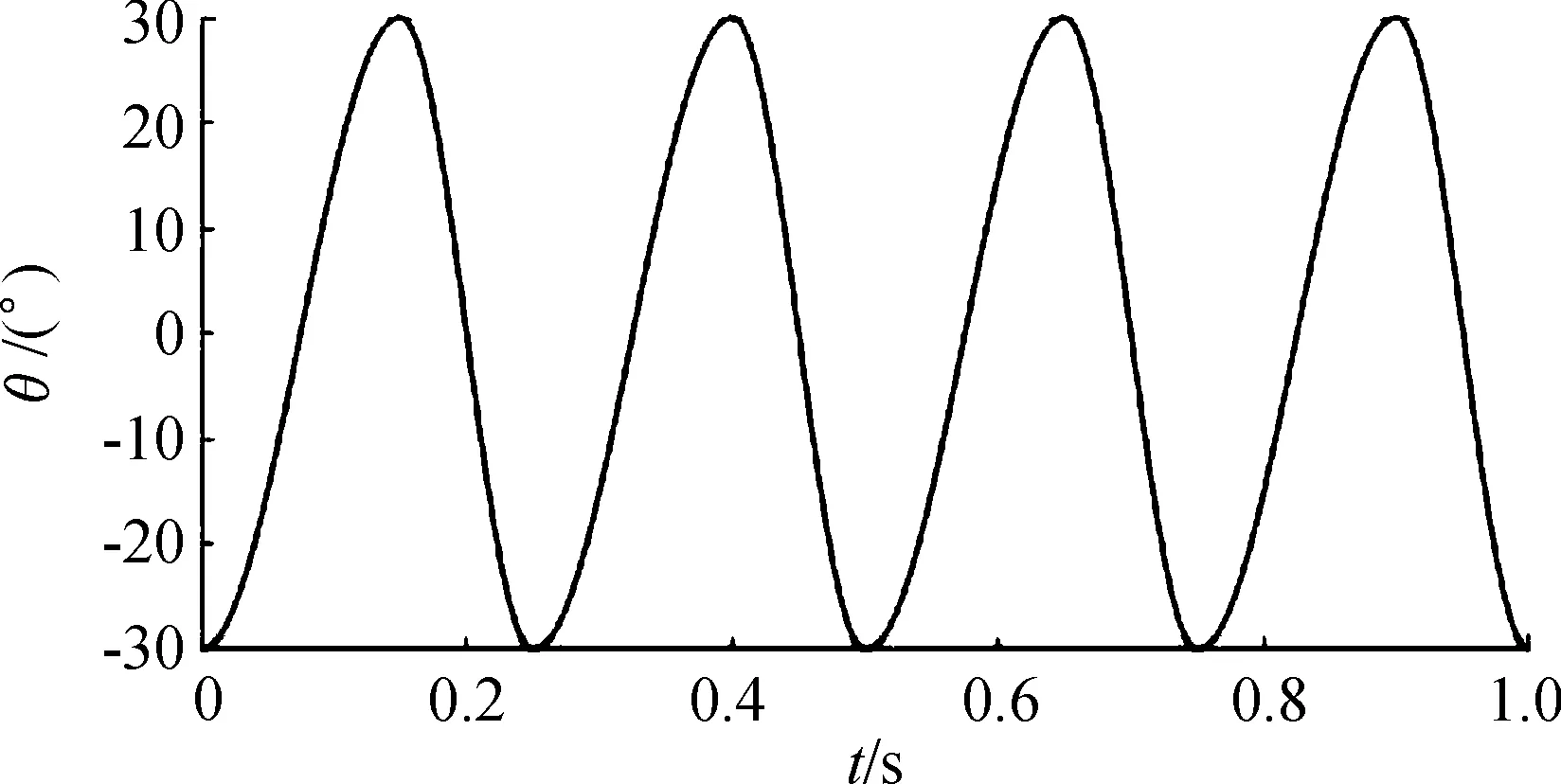
圖6 機翼撲動角變化曲線Fig.6 Curve of flapping wing angle
一個運動周期內(nèi),取0.5~0.75 s進行氣動分析,不同展弦比下?lián)湟頇C升力系數(shù)和阻力系數(shù)變化曲線如圖7。
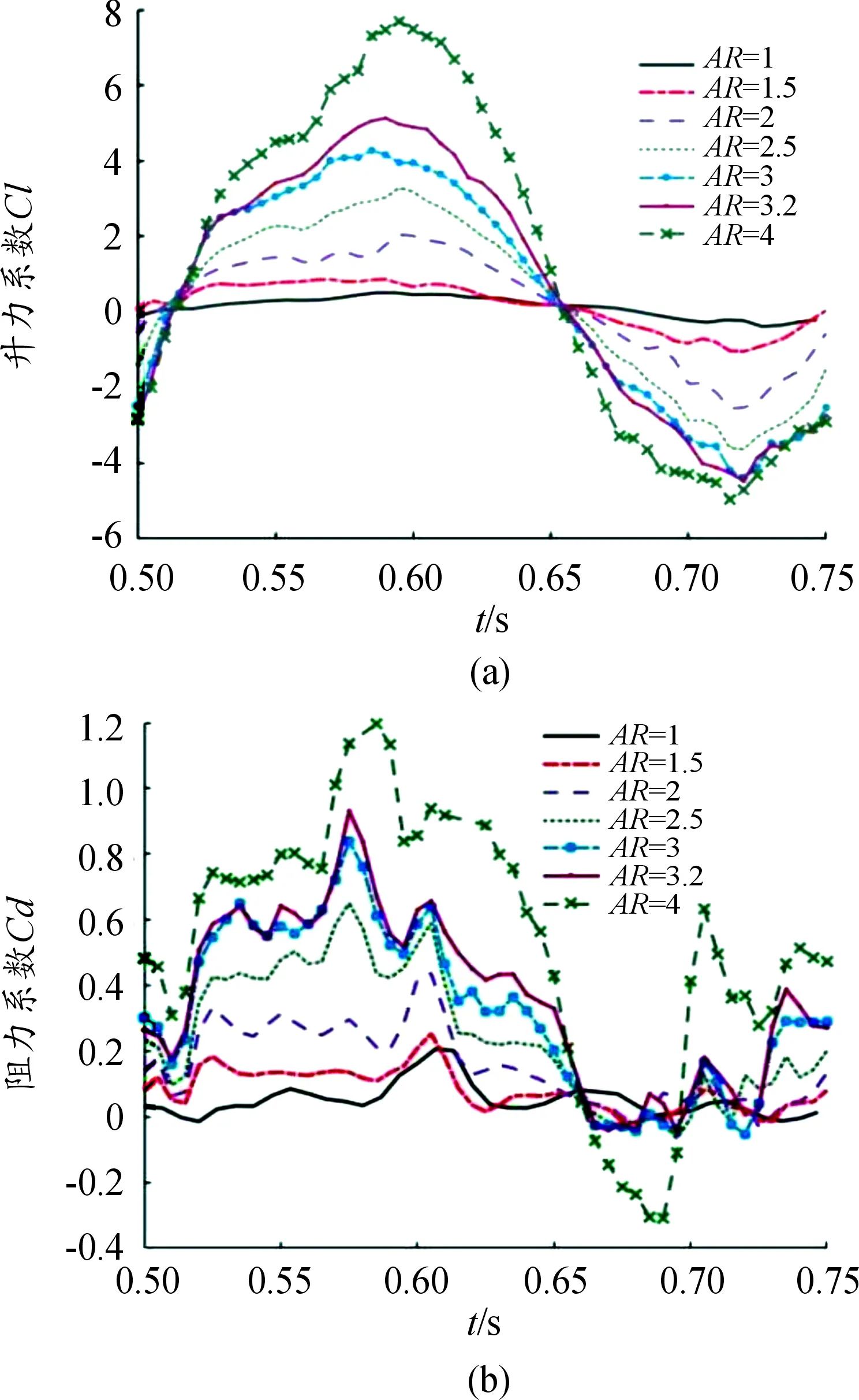
圖7 不同展弦比下升力系數(shù)(a)與阻力系數(shù)(b)變化曲線Fig.7 Curve of lift coefficient (a) and drag coefficient (b) at different aspect ratio
由圖7(a)升力系數(shù)變化曲線結(jié)果可知,不同展弦比機翼的升力系數(shù)變化曲線大體相似。0.5~0.65 s為下?lián)潆A段,升力系數(shù)曲線先增大后減小,在機翼運動值中點位置時,升力系數(shù)達到峰值,由于急回特性規(guī)律約束,此時機翼速度最快,受到空氣反作用力最大,即產(chǎn)生升力最大,此后機翼減速下?lián)洌χ饾u減小;0.65~0.75 s上撲階段,負升力逐漸增大后減小,上撲至中點位置達到負升力峰值。
圖7(b)阻力系數(shù)變化曲線說明,不同展弦比的阻力系數(shù)在下?lián)潆A段先增大后減小,大展弦比阻力系數(shù)的峰值在更早時間出現(xiàn),在下?lián)潆A段展弦比≥2.5的機翼阻力系數(shù)峰值在0.57,當展弦比≤2時,阻力系數(shù)峰值出現(xiàn)在0.61 s左右。上撲階段機翼阻力系數(shù)先減小后增大,展弦比較小機翼變化不明顯,隨著展弦比增大,阻力系數(shù)最小峰值逐漸增大,此時正推力逐漸增大。
不同展弦比機翼對撲翼機氣動特性影響如表3所示。在來流速度5 m/s,撲打頻率為4 Hz的情況下,機翼的升力系數(shù)與阻力系數(shù)隨著翼展增大而增大,升阻比先減小后增大。撲翼機升阻比在展弦比=2.5時最低,隨后增大。
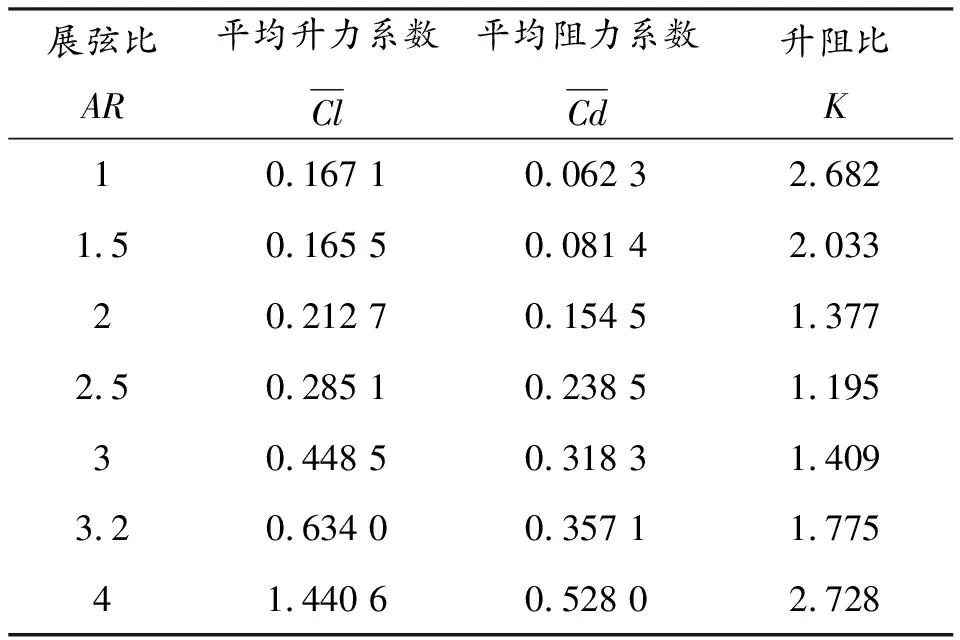
表3 不同展弦比下平均氣動特性參數(shù)
在實際飛行中,應當考慮機翼負載能力以及機翼結(jié)構(gòu)強度問題。其中負載能力以飛行器凈升力表示,凈升力變化曲線如圖8所示。
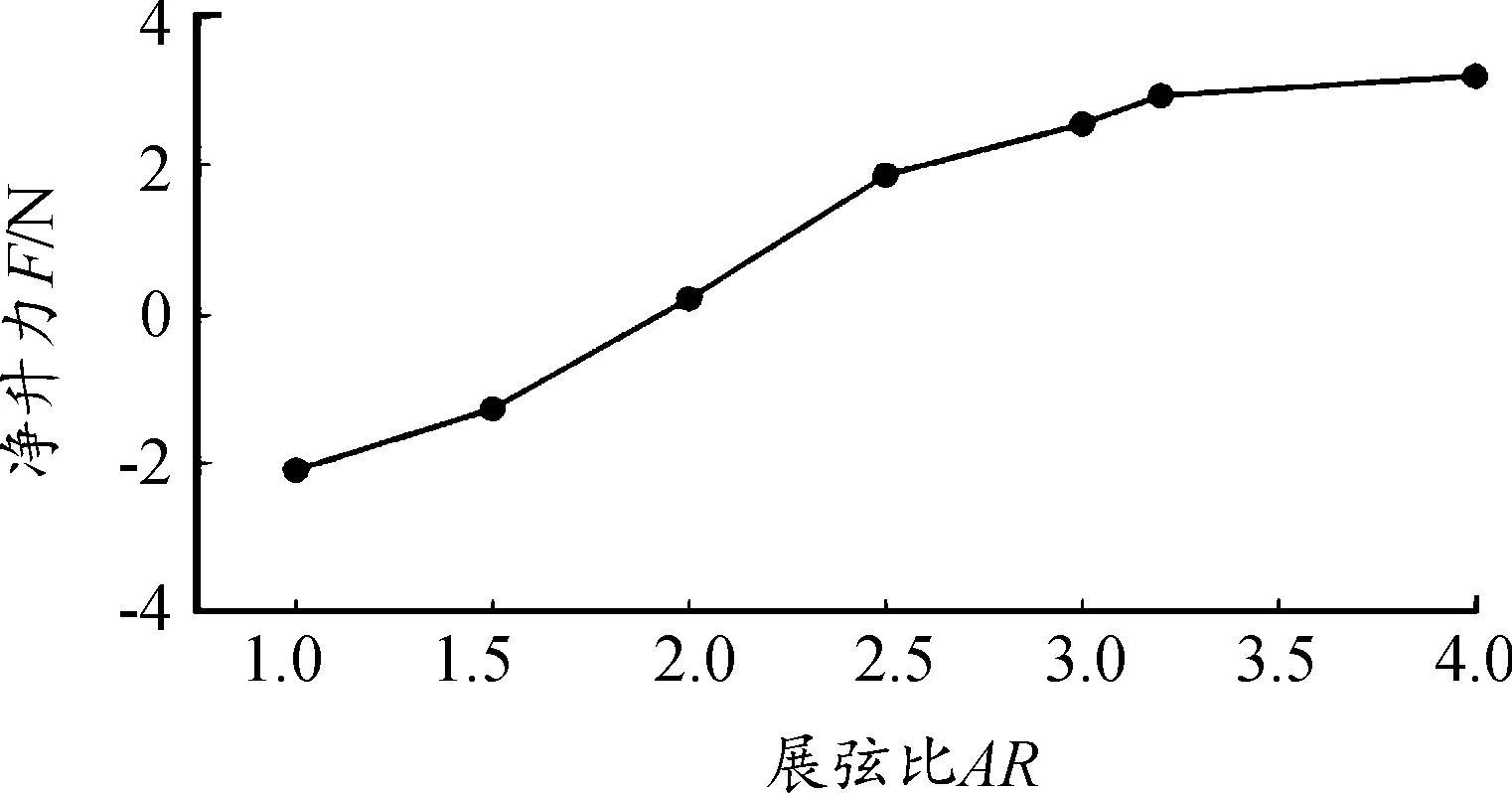
圖8 撲翼機凈升力隨展弦比變化曲線Fig.8 Curve of net lift changing with aspect ratio
仿真結(jié)果分析考慮折疊翼撲翼機整體受到重力影響。由圖8可知,在展弦比≤2時,撲翼機整體凈升力為負值,此翼展下機翼無法帶動整機升空,隨著翼展增大,展弦比在2到3.2之間凈升力從0 N提升至3 N,隨后由于機翼增長,重量隨之增加,凈升力提升維度減緩。
圖9(a)等所示為不同展弦比的撲翼機下?lián)潆A段機翼壓強分布圖,取展弦比=1,3,4做比較。左側(cè)為機翼上表面壓強分布情況,右側(cè)為同時刻機翼下表面受到壓強,高壓區(qū)域主要集中機翼最外側(cè)部分,說明機翼撲動過程之中,最外側(cè)受到空氣反作用力最大,相應的,機翼結(jié)構(gòu)越易受損,同時長翼展機翼運動消耗的能量更多。綜合考慮材料、能源消耗、撲翼機整體重量以及氣動效率,機翼展弦比=3左右可提供良好飛行性能,同時實現(xiàn)更為經(jīng)濟。
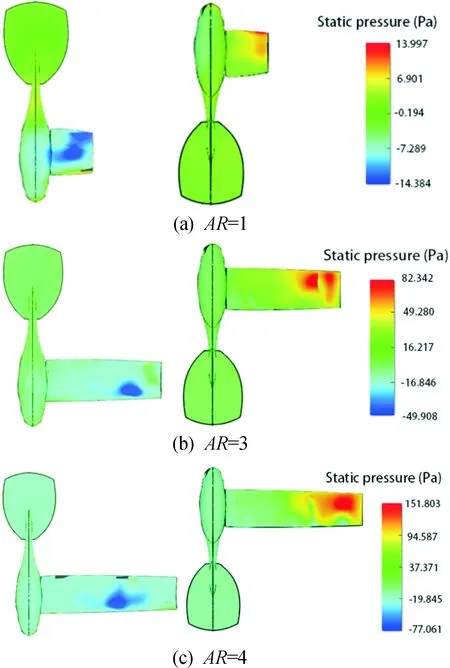
圖9 不同展弦比下機翼壓強分布云圖Fig.9 Static pressure diagram of wing at different aspect ratio
3.4 折疊翼撲動頻率對飛行器氣動特性影響
圖10(a)和圖10(b)分別表示不同的機翼撲動頻率下升力系數(shù)和阻力系數(shù)曲線。實驗條件為來流速度為5 m/s,機翼初始迎角為5°,機翼展弦比為3,選取仿真時間1 s。
隨著撲動頻率增大,機翼上下表面壓強差值增大,撲翼機升力系數(shù)和阻力系數(shù)的波峰正向增大,波谷負向增加。由圖10(b)分析得出:在機翼撲動頻率4~6 Hz時,阻力系數(shù)負向峰值出現(xiàn)負數(shù),即正向推力系數(shù)。不同撲動頻率的平均升力系數(shù)與平均阻力系數(shù)如表4所示,結(jié)合圖10和表4數(shù)據(jù),撲翼機撲動頻率在4~5 Hz獲得較優(yōu)氣動效率。
圖11(a)-圖11(e)表示撲翼機機翼撲動頻率逐漸從2 Hz增大至6 Hz,機翼附近空氣流動變化。左側(cè)為機翼下?lián)渲磷畹忘c,右側(cè)為機翼上撲,上撲過程中,外段翼相對內(nèi)段翼做折疊運動。隨著頻率的增加,機翼附近的空氣流速增大;下?lián)鋾r,機翼上表面空氣流速明顯大于下表面,產(chǎn)生壓差,使得飛行器獲得升力,機翼折疊上撲時,由速度云圖變化來看,機翼下表面空氣流速大于上表面;折疊翼不對稱運動,一個撲打周期內(nèi),空氣對其做功不均等,使其飛行過程中獲得更大的凈升力。
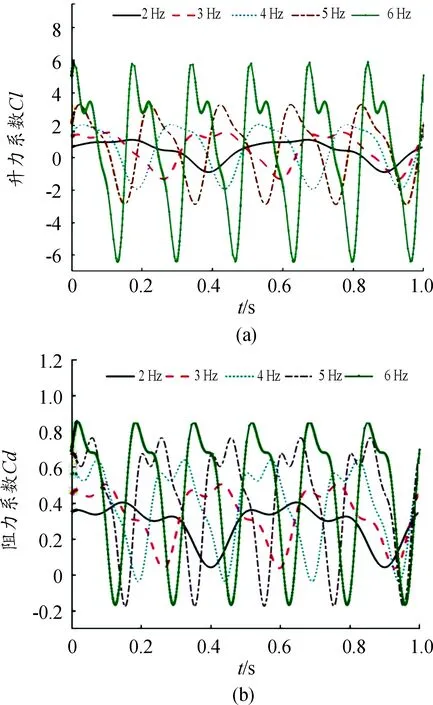
圖10 不同撲動頻率下升力系數(shù)(a)與阻力系數(shù)(b)變化曲線Fig.10 Curve of lift coefficient (a) and drag coefficient (b)at different flutter frequency
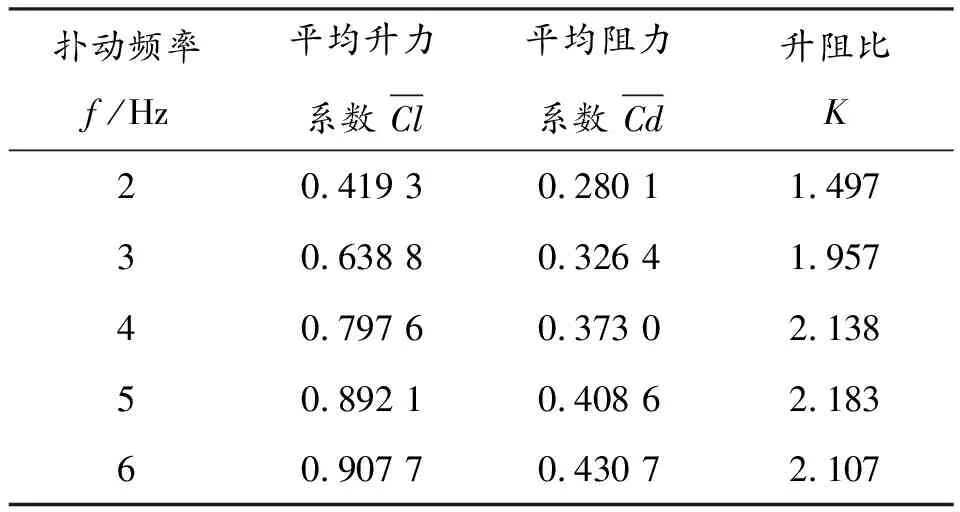
表4 不同撲動頻率下平均氣動特性參數(shù)
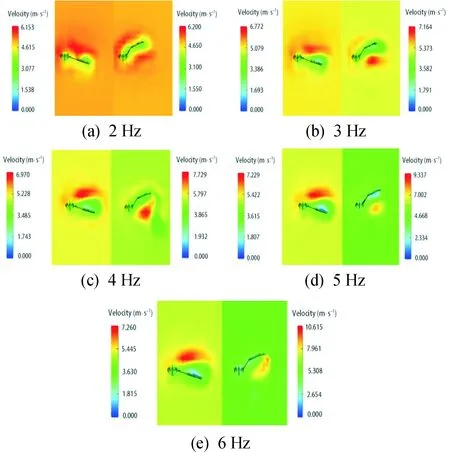
圖11 不同撲動頻率下速度云圖
4 羽翼動力飛行器飛行實驗
鳥類翅膀不僅實現(xiàn)拍打-折疊2個自由度運動,還可實現(xiàn)翅膀合攏-展開,非對稱伸展等多自由度運動。文獻[8]指出:鳥類控制翅膀羽毛不對稱變形從而快速轉(zhuǎn)向,實現(xiàn)復雜環(huán)境高效飛行。傳統(tǒng)撲翼機采用膜狀翼結(jié)構(gòu),如圖12(a)所示,機翼覆膜區(qū)域連為一體,無法實現(xiàn)飛行器機翼變形。本文仿照真實鳥類翅膀分層結(jié)構(gòu),研制出羽毛機翼,如圖12(b)所示,實現(xiàn)拍打-折疊2個自由度運動。
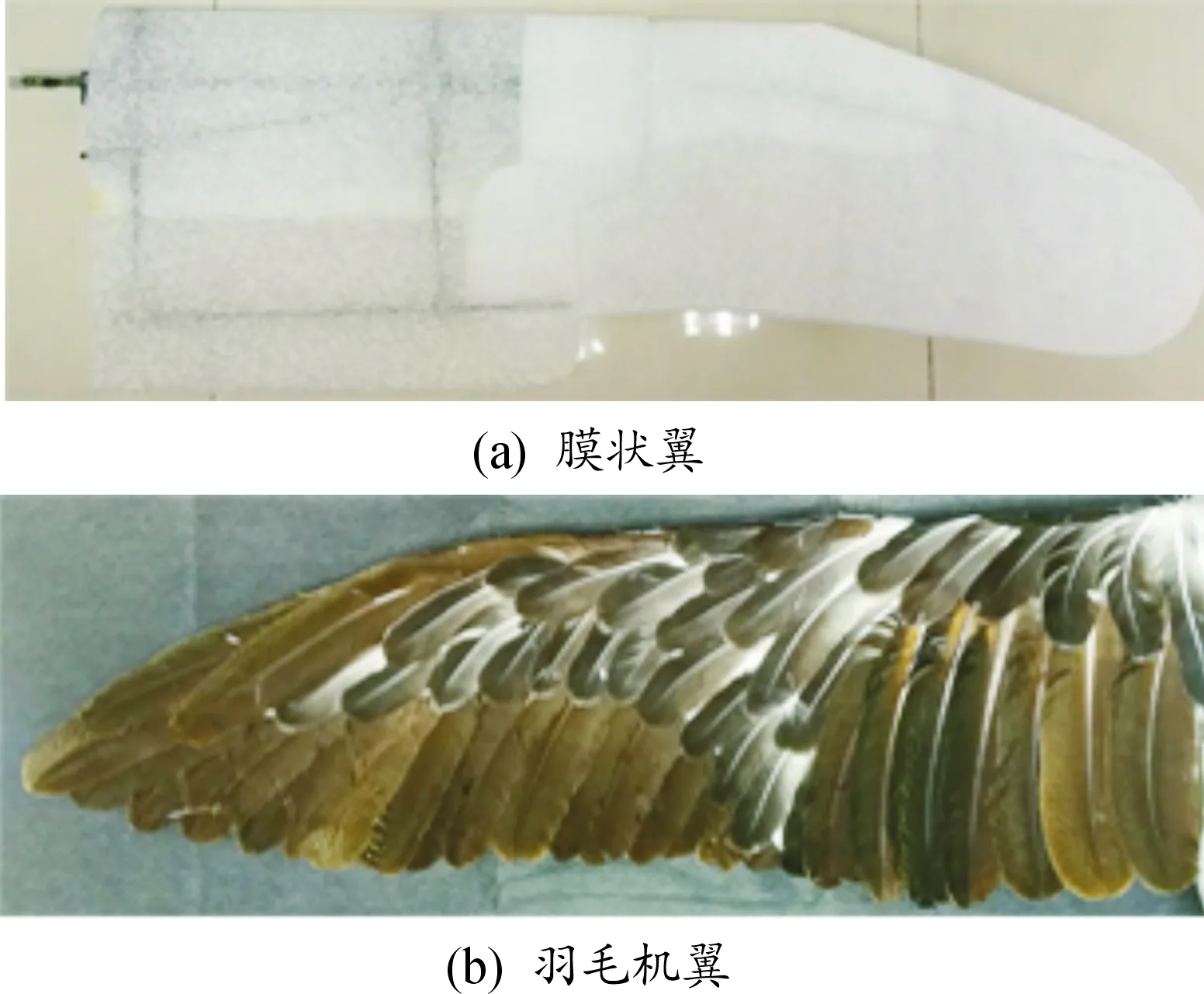
圖12 機翼結(jié)構(gòu)模型示意圖Fig.12 Model diagram of wing structure
羽毛機翼優(yōu)勢在于羽毛分層結(jié)構(gòu)及羽毛獨立性。在撲翼機未來研制中,控制每根羽毛的獨立運動,實現(xiàn)機翼多自由度變形,使得人造機器鳥具有更強仿生性能,提高復雜環(huán)境飛行適應性。
本文研制羽毛機翼實現(xiàn)拍打-折疊2個自由度運動。撲翼機不同階段姿態(tài)如圖13(a)等所示。首次使用羽毛撲打產(chǎn)生動力實現(xiàn)人造機器鳥飛行。撲翼飛行器撲打頻率約4 Hz,展弦比為3.2,飛行時長90 s,證明仿真結(jié)果準確性,同時為研制機翼多自由度變形仿生機器鳥提供理論可行性和有效飛行平臺。
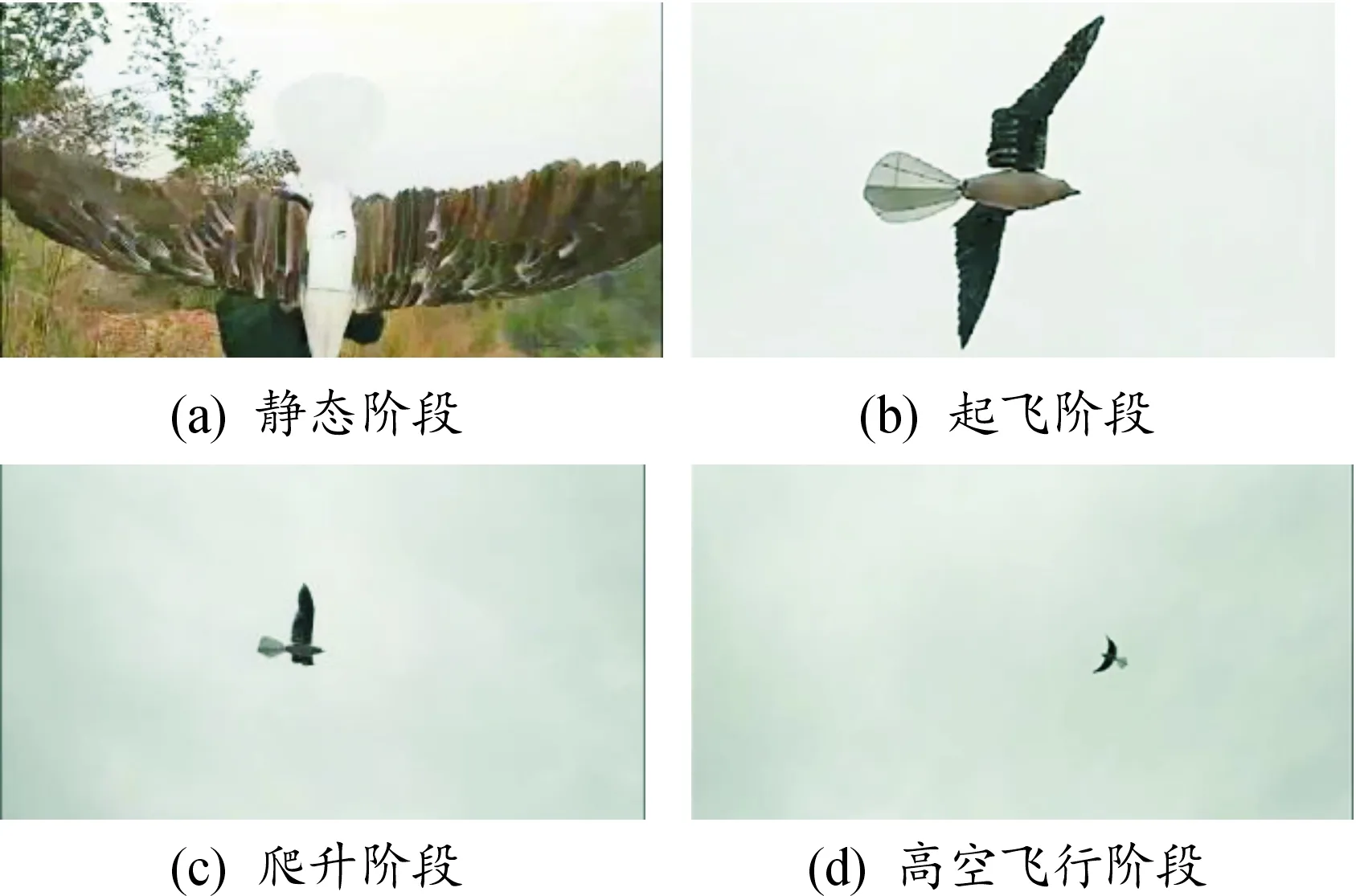
圖13 全羽翼折疊翼撲翼機外場飛行實驗姿態(tài)圖Fig.13 Field flight experiment of full-wing folding wing flapper
5 結(jié)論
本文仿照真實鳥類飛行機翼運動機理,建立“鉸鏈式”折疊翼撲翼機模型,在傳統(tǒng)撲翼飛行器機翼基礎上,通過鉸鏈鍵將機翼分為內(nèi)段翼和外段翼,并通過兩段機翼間運動相位差,實現(xiàn)模仿鳥類撲打-折疊動作。通過模型運動仿真以及氣動仿真實驗,得出以下結(jié)論:
1) 建立折疊翼飛行器模型,實現(xiàn)內(nèi)段翼往復運動,外段翼翼尖“8”字運動模式,成功模擬真實鳥類翅膀運動軌跡。證明了模型的可行性。
2) 仿真實驗表明:撲翼機機翼初始迎角在5°時獲得最大升阻比系數(shù);撲翼飛行器機翼展弦比為3左右氣動性能較優(yōu);提高機翼撲動頻率可提升撲翼機的氣動效率,并在4~5 Hz時取得最佳氣動效率。
3) 羽翼動力撲翼飛行器外場成功飛行,驗證了飛行器模型和仿真實驗結(jié)果合理性、準確性,為后續(xù)仿生機器鳥復雜運動提供有效的實驗數(shù)據(jù)。