旋轉彈彈體磁場干擾的實時在線補償
2022-06-04 12:24:52薛羽陽張曉明張鶯鶯
兵器裝備工程學報 2022年5期
薛羽陽,張曉明,2,張鶯鶯,曹 院,王 凡
(1.中北大學 電子測試技術國家重點實驗室, 太原 030051;2.中北大學儀器科學與動態測試教育部重點實驗室, 太原 030051;3.中航光電科技股份有限公司, 河南 洛陽 471000;4.中國空空導彈研究院, 河南 洛陽 471009)
1 引言
制導彈藥是現代戰爭中實現精準打擊的重要武器手段,滾轉角是其姿態控制中必不可少的參數。地磁測姿技術作為一種全自主導航系統,憑借其穩定性高、體積小、成本低、誤差不累積的特點,廣泛應用于制導彈藥滾轉角信息的獲取。理想條件下,以磁傳感器為核心構建的磁測系統在使用時,通過測量地磁場矢量在其三軸的分量而實現對滾轉角的解算。在制導彈藥滾轉角的解算過程中,測量精度除受傳感器自身零偏、靈敏度、不正交角等相關參數偏移的影響外,還受到彈體磁場影響導致滾轉角測量不準確。彈體干擾磁場主要由彈體結構中存在的鋼合金等硬磁性材料產生,受發射時的高過載環境和儲存環境的磁場影響,彈體磁場容易發生變化,且發射時引起的磁場變化無法事先標定,需要采用實時在線的方式對其進行補償。
針對彈體磁場干擾的校準,楊宇彬等提出了異常磁信號濾除算法,異常磁信號濾除算法適用于制導彈藥實際工作環境中的工程問題,通過最優線性移動平滑算法對飛行過程中的采樣數據進行估計,從而實現對出現的異常磁信號即野值進行濾除,但該方法適用于干擾信號中類脈沖信號的消除,對彈體飛行過程中長時間存在的干擾磁場量無法濾除。狄素素,曾成等提出了兩步校正算法,兩步校正算法在地面能夠將實現將磁測系統所在結構的固定磁場干擾進行標定,其通過場矢量在傳感器各軸上的投影關系,在不同測量軸所在平面進行轉動即可實現標定,可用于制導彈藥彈體結構的干擾磁場所造成的偏移,但在發射高過載環境影響后彈體磁場已經發生改變,使用事先地面標定參數解算的滾轉角不準確,需要對其進行在線修正。
因此,本文提出一種基于實時濾波的彈體磁場在線補償方法,可實現在旋轉彈藥飛行過程的極短時間內完成測量量的實時修正,以解決發射高過載環境后彈體磁場變化引起的滾轉角解算誤差問題。
2 磁測系統測量模型
利用磁場信息解算滾轉角時,需要將發射系下磁場三分量轉換為彈體系下的磁場三分量。定義發射坐標系為系,系中的三分量以表示,彈體坐標系為系,系中的三分量以表示。根據典型彈道規律,彈藥在發射后基本處于彈道射擊平面內,旋轉彈藥飛行軌跡符合零偏航假設,在飛行過程中,偏航角不發生改變,滾轉角與俯仰角變化。則彈體坐標系與發射坐標系間存在如下轉換關系:
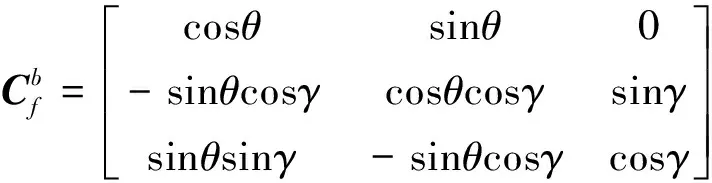
(1)


(2)
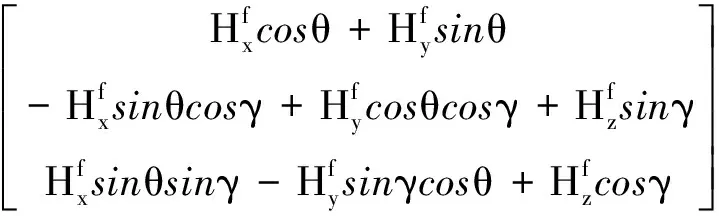
三分量形式為
(3)
其中,
旋轉彈彈體存在的干擾磁場分為固定磁場和感應磁場。其中,固定磁場主要由彈體鐵磁材料外殼及其他鐵磁材料部件產生,這類材料屬于硬磁材料,具有高矯頑力與剩磁值,一經外界磁場磁化后,其剩磁可保留較長時間不消失。彈體在儲存期間,較長時間保持在某一固定地點的固定方位上,持續受該位置地磁場影響使得彈體中的硬磁材料被磁化而具有較強的磁性,即干擾磁場中的固定磁場,而發射高過載環境還會引起這類固定磁場的變化,發射后的固定磁場主要為熱電池等電氣元件在激活使用時產生的固定磁場,這一類電氣元件在彈體結構上使用時其位置固定,設備電流穩定,由此產生的干擾磁場為一常量,也可以歸類為固定磁場引起的誤差問題,固定磁場造成的誤差可視作測量值偏移量。感應磁場主要由彈體結構中存在的軟磁材料產生,軟磁材料具有低矯頑力和高磁導率,易于磁化,也易于退磁。感應磁場造成的誤差可以將其視為對三軸靈敏度的誤差,需要有感應磁場的等效靈敏度矩陣對其進行補償。綜合彈體存在的干擾誤差源,則實際測量值表示為
=+
(4)

使用SPSS 21.0對各項資料進行統計、分析,計量資料以均數±標準差表示,采用t檢驗;計數資料采用率表示,采用檢驗,以P<0.05為差異有統計學意義。
3 誤差分析
根據以上分析可知,高旋彈體在飛行過程中的磁測系統實際測量值可以用式(4)表示,其中包含固定磁場和感應磁場兩類干擾磁場。由于彈體外形一般為圓柱體,其在飛行過程中通過切割地磁場磁力線產生的感應磁場強度很小,即可視為單位矩陣,感應磁場造成的干擾磁場在分析時可以忽略不計,系統測量誤差的主要來源為彈體上存在的固定磁場,三分量實際測量值表示為
=+
(5)
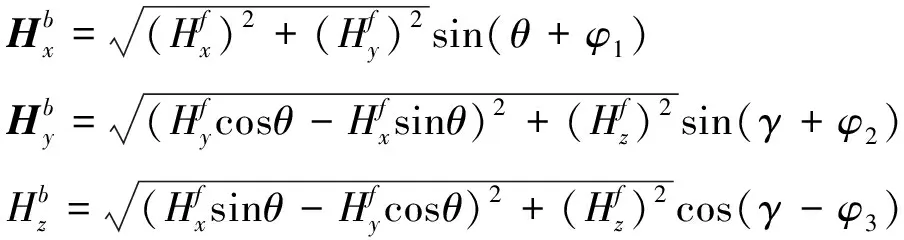
以滾轉角速率為自變量的形式如下:

(6)
其中,

(7)

(8)
根據式(6)中的分析,軸信號與軸信號中理想測量量與滾轉角速率有關,使用高通濾波的方式對其進行干擾補償,濾除干擾磁場引起的偏移誤差,即可得到準確的彈體坐標系下的磁場測量量。
為保證對原始數據的高精度實時處理,在設計時選用IIR濾波器,實現對測量值原始數據的高精度實時補償。通過對旋轉彈實際飛行狀態的運動特性分析,可以得出,旋轉彈藥在飛行時,角速率一般可達到5 r/s及以上,根據旋轉速率與信號周期對應關系,可計算得到徑向磁場測量值頻率為5 Hz及以上,則可通過IIR高通濾波器實現對徑向兩軸測量量內存在的固定磁場干擾量進行濾除。
4 實驗
4.1 仿真驗證
為驗證上述補償方案,結合彈體飛行時姿態變化規律,旋轉彈藥飛行時偏航角由初始射向決定,發射后不發生變化,俯仰角與滾轉角變化曲線如圖1。

圖1 飛行姿態曲線
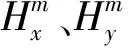
根據以上條件假設磁測系統在穩定地磁場中軸,軸測量值峰值分別為[40 000,40 000]nT,根據旋轉彈藥飛行時的運動狀態實際情況,、軸信號頻率為5 Hz。在原始信號值上添加一定的干擾磁場值,作為初始值。干擾磁場值分布如圖2所示,初始值如圖3所示。
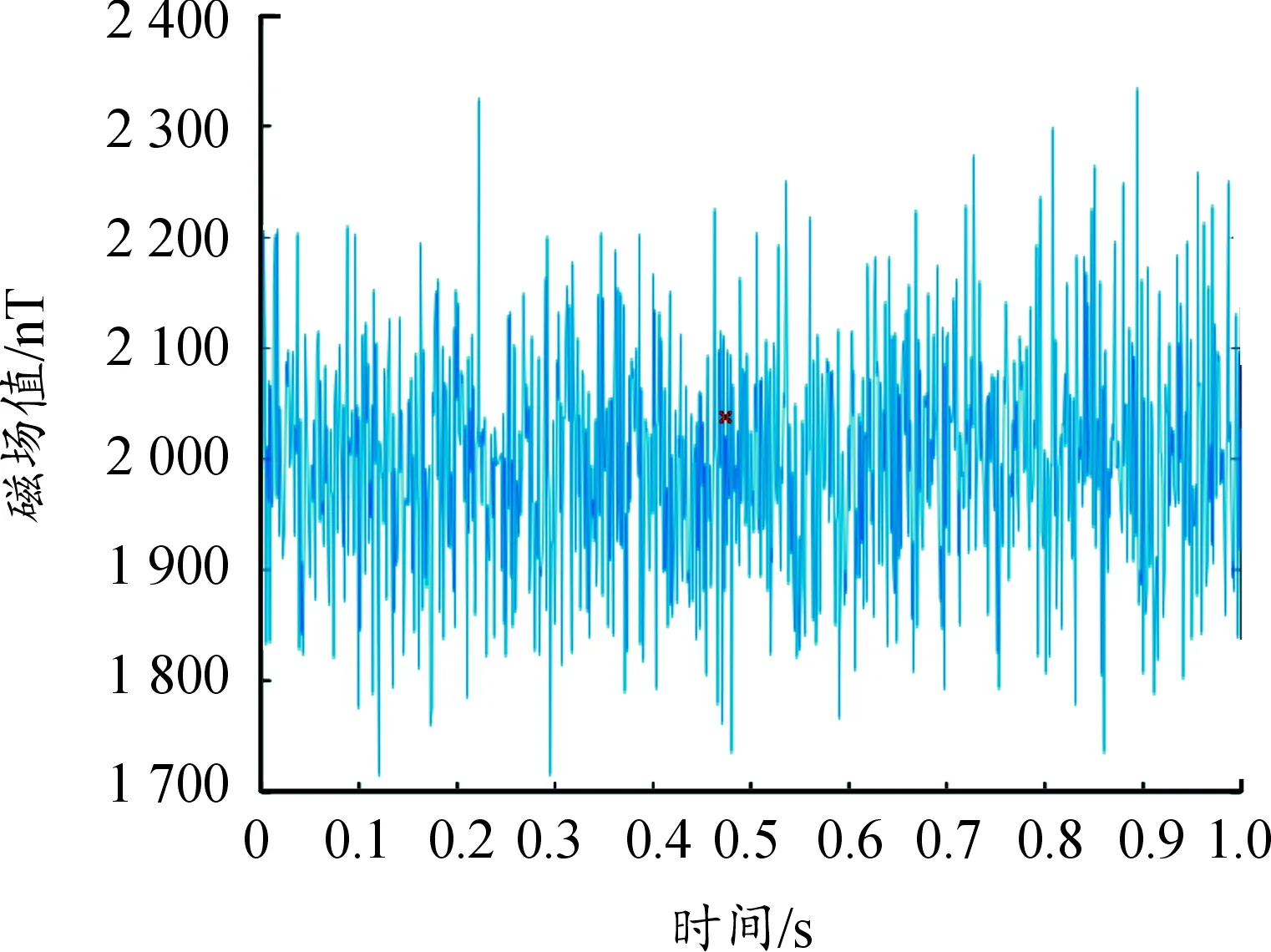
圖2 干擾磁場值分布曲線
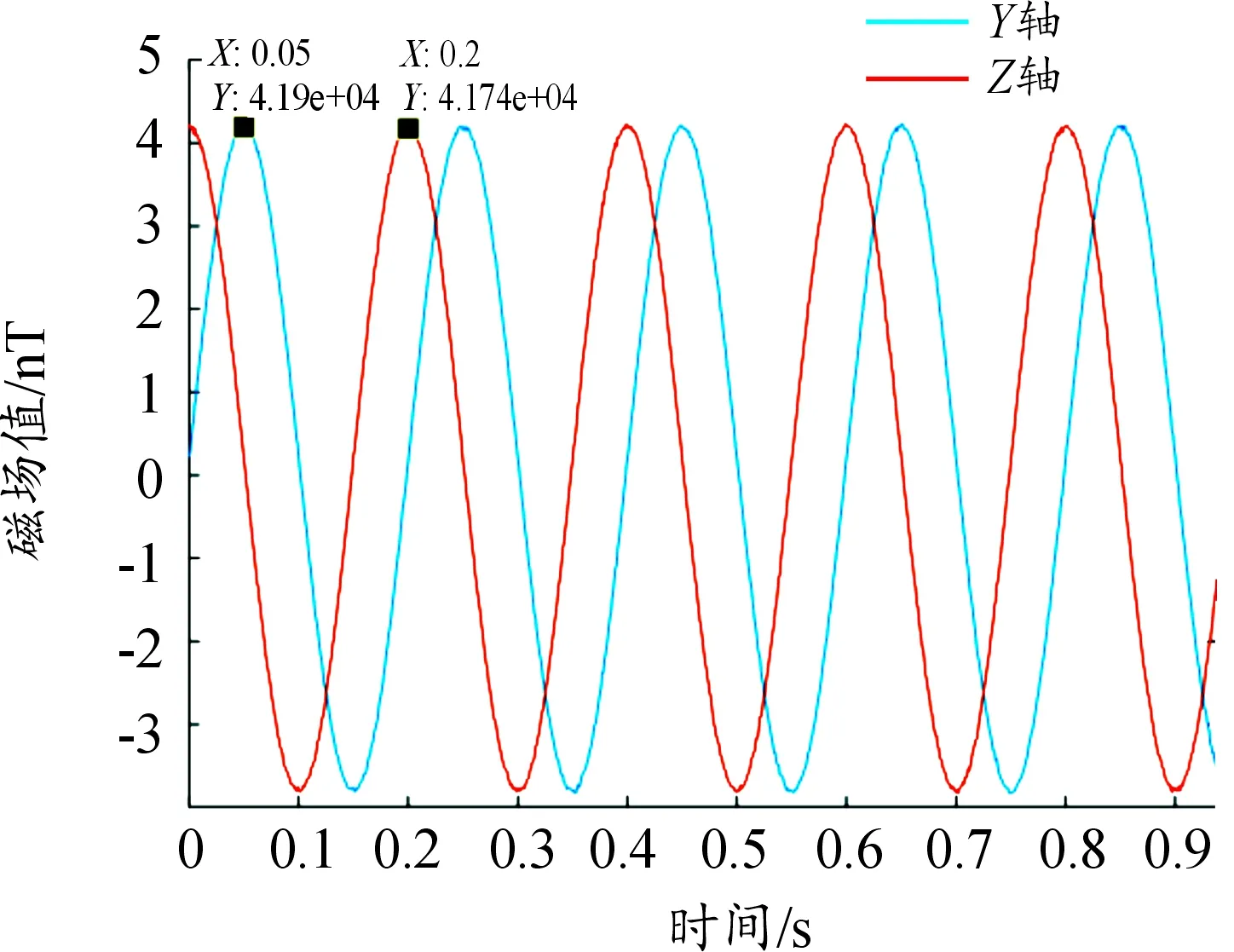
圖3 仿真數據初始值曲線
初始值峰值分別為41 925 nT和41 744 nT,誤差值分別為1 925 nT和1 744 nT,將初始值按照上述補償方案進行高通濾波處理,濾波器選用IIR高通濾波器,對于理想高通濾波器條件,通帶與阻帶之間不存在過渡,但實際濾波器較理想情況過度緩慢,通帶與阻帶之間存在一定頻率范圍的過渡帶,其截止頻率設計為1 Hz。濾波器采樣頻率根據奈奎斯特采樣定理,為保證采樣之后的數字信號能夠完整保留原始信號信息,設置為50 Hz。濾波器階數與濾波器效果有關,同時較高階數需要的計算量大,會造成數據處理時的較大時延,為保證濾波器的濾波效果同時較小時延要求,設計為2階濾波器,所設計IIR高通濾波器參數如表1所示,幅頻特性如圖4所示。

表1 濾波器參數
圖4 濾波器幅頻特性曲線
得到補償后的測量值如圖5所示。由圖5、圖6可以看出:根據上述方案對干擾磁場引起的誤差值進行補償后,測量值誤差明顯減小,軸誤差值減少為27 nT,軸誤差值減少為38 nT。補償前-軸磁場值零點受干擾磁場影響發生偏移,補償后零點位置準確,驗證了補償模型的準確性。
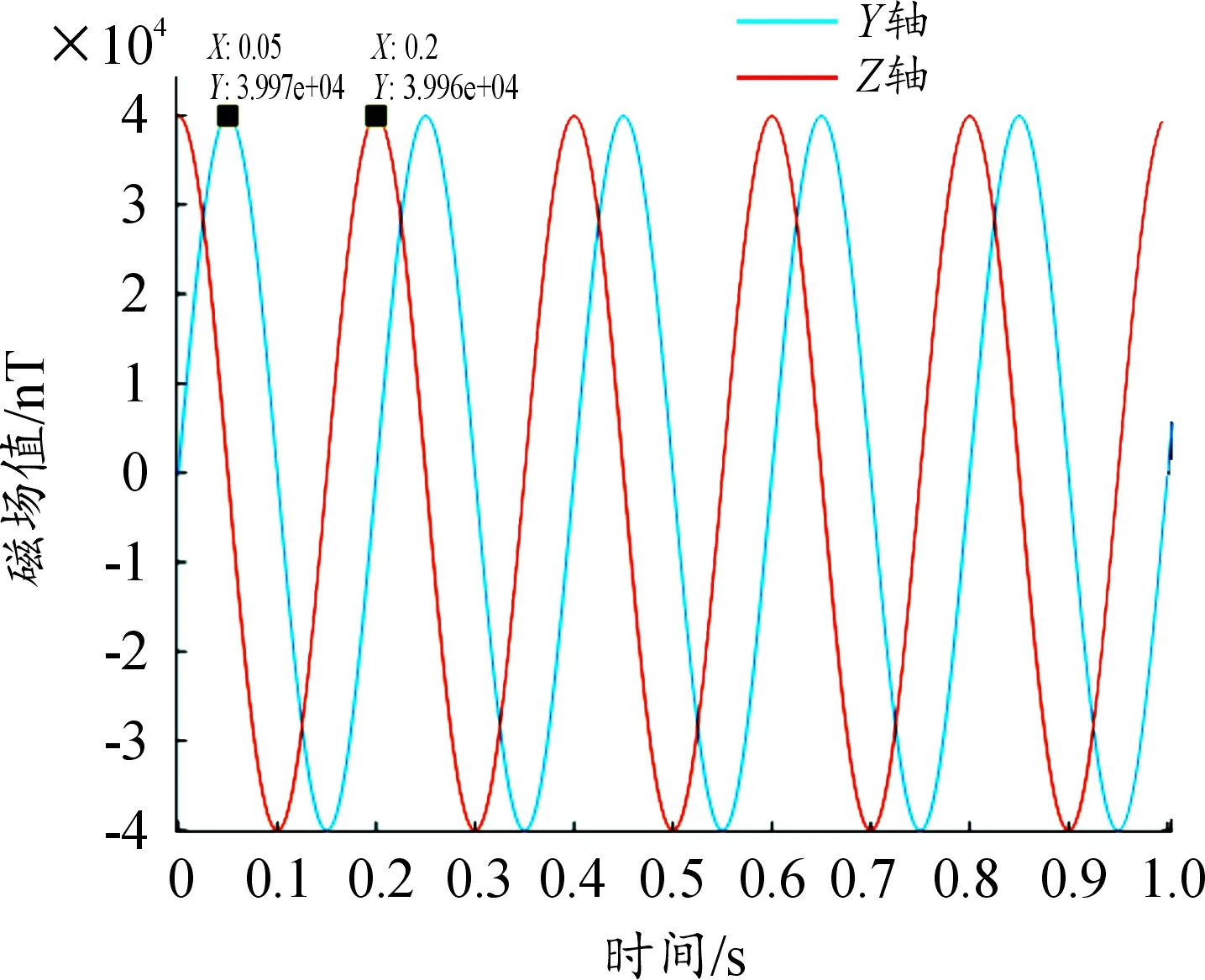
圖5 補償后的測量值曲線
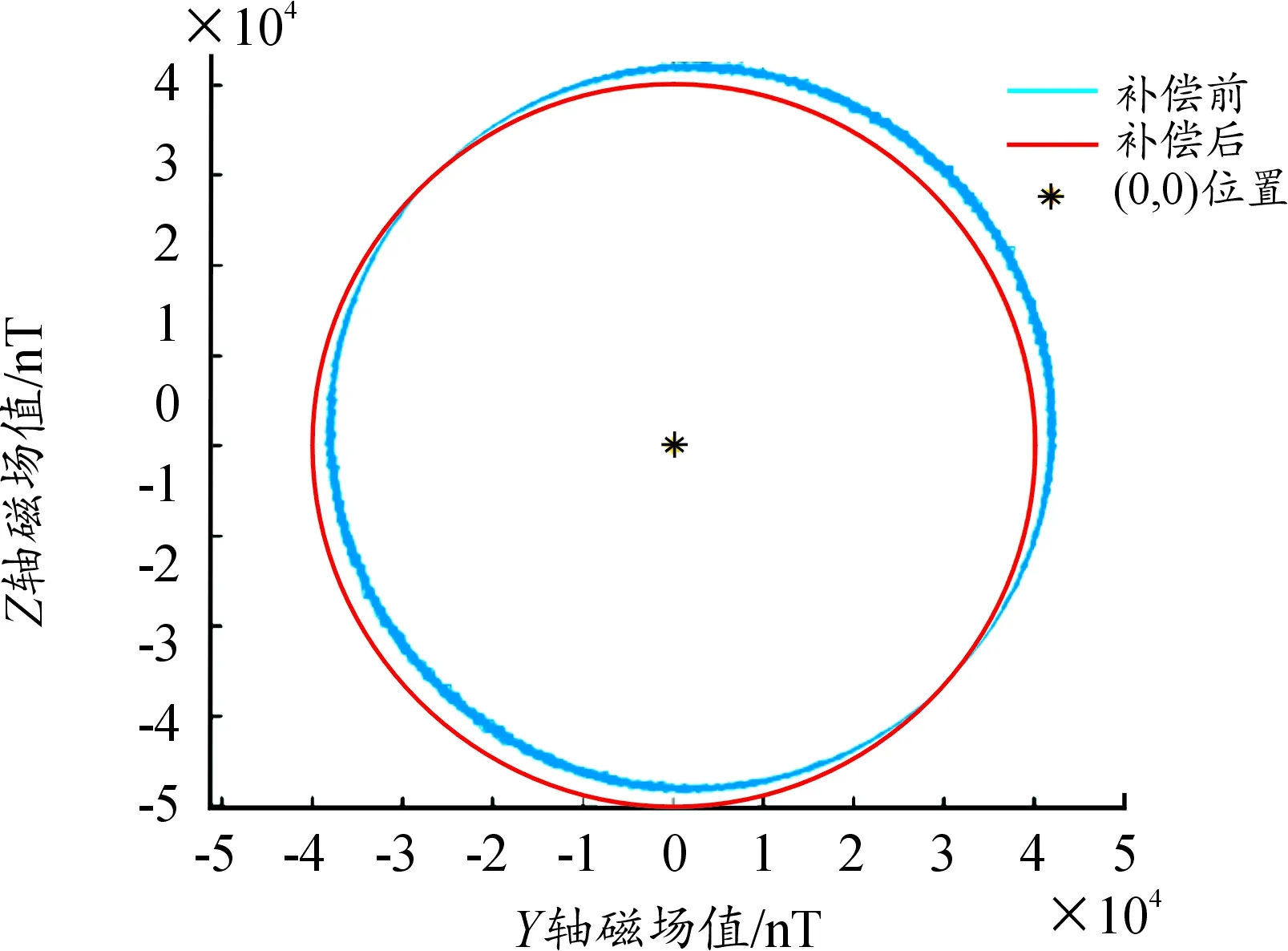
圖6 零點位置變化曲線
由于截止頻率對濾波器效果有直接影響,調整截止頻率再次補償,進行對比。
1) 截止頻率為2 Hz(圖7)。
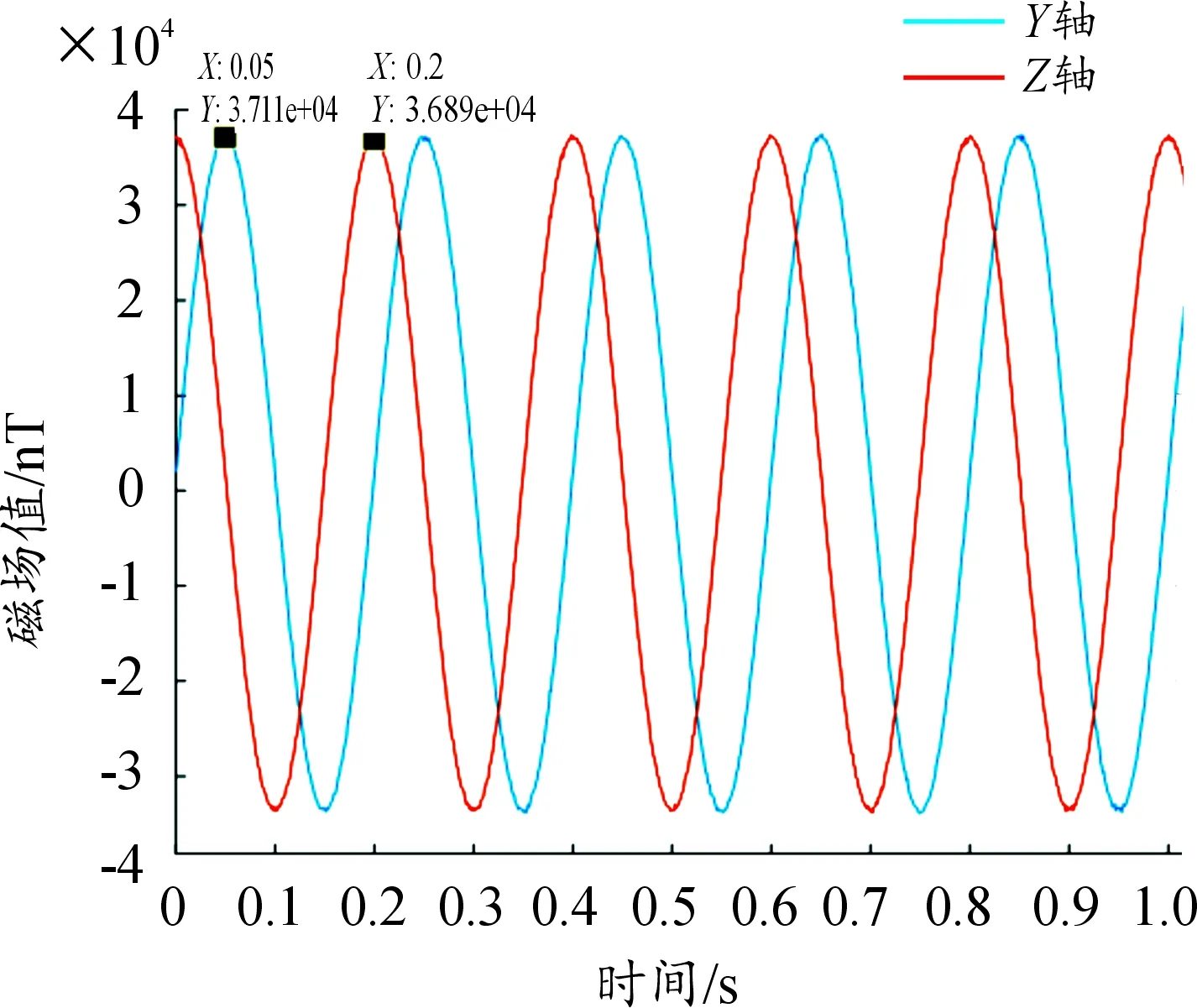
圖7 截止頻率為2 Hz補償曲線
2) 截止頻率為3 Hz(圖8)。

圖8 截止頻率為3 Hz補償曲線
由圖7、圖8可以看出,當調整濾波器頻率分別為2 Hz和3 Hz時,軸峰值分別為37 118 nT和36 197 nT,軸峰值分別為36 891 nT和36 180 nT,濾波后得到的補償值誤差較1 Hz濾波顯著增大,證明截止頻率與有用信號頻率差值越小,得到的補償結果誤差越大,則在設計時應遵循截止頻率與有用信號頻率差值盡可能大的原則。
4.2 半物理實驗
選用以三軸磁傳感器HMC1053作為磁敏感單元,STM32作為MCU的磁測系統進行試驗,將磁測系統安裝在三軸高速模擬飛行轉臺上如圖9所示,將俯仰角與偏航角調整為0°。

圖9 磁測系統安裝狀態圖
控制模擬飛行轉臺使磁測系統僅繞軸做滾轉運動,得到磁測系統徑向測量值如圖10所示。
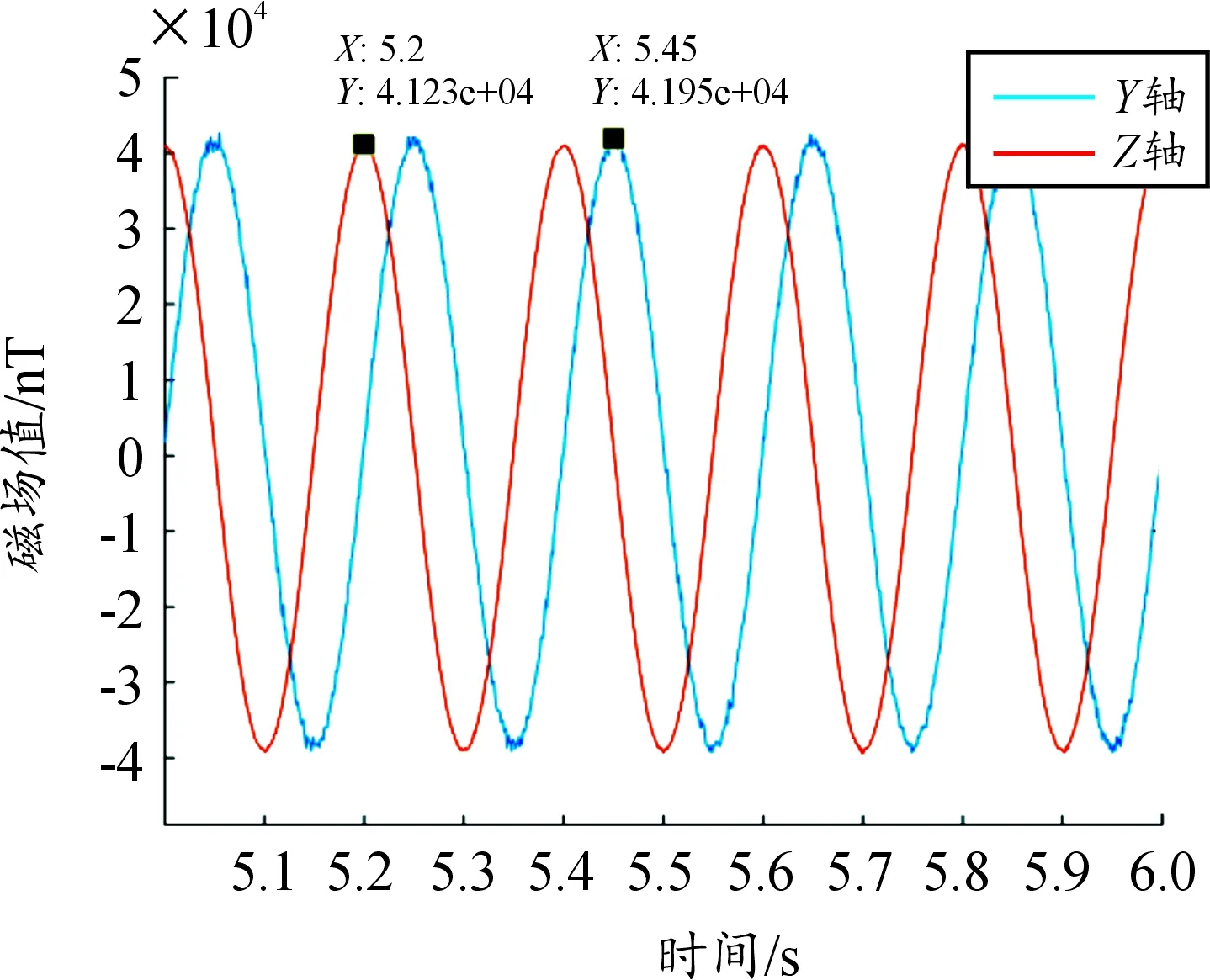
圖10 補償前測量值曲線
將測量值進行滾轉角解算,與飛行轉臺反饋標準滾轉角度數變化曲線對比,即可得到補償前的滾轉角解算誤差。通過分析滾轉角角速率得到信號頻率,對測量數據進行濾波后得到補償后的測量值峰值分別由41 235 nT和41 957 nT減小為39 853 nT和40 142 nT,如圖11所示。
重新進行滾轉角解算,再次與飛行轉臺反饋標準滾轉角度數變化曲線對比得到滾轉角解算誤差,誤差曲線如圖12,誤差統計值如表2所示。
綜合圖12和表2可以得出:當彈體的俯仰角與偏航角均為0°,僅處于繞軸向的高速旋轉狀態時,由于干擾磁場的存在,直接使用地面標定參數進行滾轉角解算得到的滾轉角誤差值峰值達到9.4°,誤差均值為3.418°,且誤差值呈周期性變化。而使用文中所述的方案對三軸磁場測量值進行補償后,得到的滾轉角誤差值明顯減小,誤差峰值減小至2°以內,誤差均值為0.371°,誤差隨機分布,不具有周期特性,滾轉角精度提高6倍,可以滿足制導彈藥對滾轉角精度的要求。

圖11 補償后測量值曲線
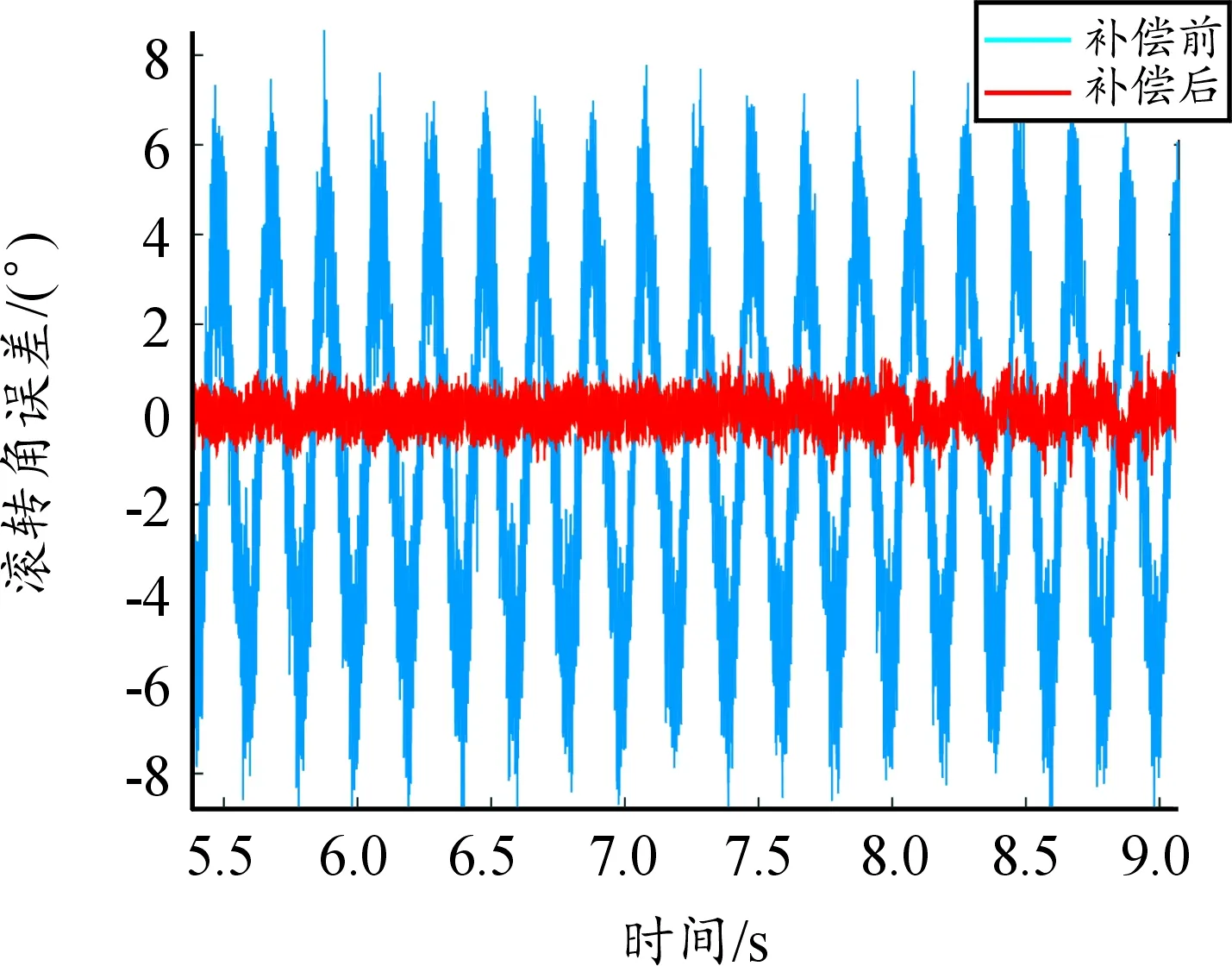
圖12 滾轉角誤差曲線

表2 誤差值
5 結論
本文針對旋轉彈彈體干擾磁場引起的滾轉角解算不準確問題,提出了一種基于實時濾波的在線補償方法。通過分析磁測系統中滾轉角解算原理得到三軸磁場測量值與滾轉角之間的數學關系,利用角速度得到徑向信號在高速旋轉過程中的頻率參數,設計IIR高通濾波器對其進行補償。通過仿真實驗表明,該方法可應用于對存在彈體干擾磁場的磁測系統進行測量值補償,能夠有效減小彈體干擾磁場引起的磁場值誤差。通過分析半物理實驗數據可以得出,當彈體做高速旋轉運動時,經過該方案補償后得到的滾轉角精度提高,誤差值可達到2°以內,該方案中的補償方式計算量小,實時性好,在STM32單片機上可實現對信號的實時補償,滿足制導彈藥的滾轉角精度及時延性需求,對于提高磁測系中滾轉角統解算精度,滿足高速旋轉彈的測姿需求有較高的應用價值。
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時刊(2020年13期)2020-09-25 08:21:42
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21