基于信息融合的八旋翼飛行器狀態解算*
2016-08-02 07:28:13趙世榮孫運強石喜玲
彈箭與制導學報 2016年2期
趙世榮,孫運強,石喜玲
(1 中北大學儀器與電子學院,太原 030051;2 電子測試技術國家重點實驗室,太原 030051)
?
基于信息融合的八旋翼飛行器狀態解算*
趙世榮1,2,孫運強1,2,石喜玲1,2
(1中北大學儀器與電子學院,太原030051;2電子測試技術國家重點實驗室,太原030051)
摘要:針對四旋翼飛行器欠驅動控制和有效負載能力不足的特性,提出了八旋翼飛行器作為解決方案。分析八旋翼飛行器的動力學模型,建立其運動狀態方程,采用無跡卡爾曼濾波算法實現飛行器姿態檢測系統的數據融合。通過理論分析和Matlab仿真試驗表明:采用狀態估計融合濾波算法,有效提高了八旋翼飛行器姿態解算精度,可以獲得最優姿態角度,滿足八旋翼飛行器穩定的要求。
關鍵詞:八旋翼飛行器;信息融合;運動姿態解算;無跡卡爾曼濾波
0引言
近年來,無人飛行器UAVs(unmannedaerialvehicles)越來越受到人們的青睞[1]。四旋翼無人飛行器以其體積小,機動性強,價格低廉,能夠垂直起降等特性,可用于多種惡劣環境搜索和救援行動,空中成像和測繪,交通監控,安全任務等多方面。然而,四旋翼重要的缺點是飛行控制可靠性和有效負載能力不足。在文獻[2-3]中提出了星形八旋翼飛行器配置,8個旋翼有效增加了飛行器推力,起飛載重和飛行信息冗余能力顯著提高。文中對八旋翼飛行器進行動力學分析,研究姿態解算方法,采用無跡卡爾曼濾波算法對八旋翼姿態檢測系統多傳感器信息融合實現姿態最優估計。
八旋翼飛行器的運動姿態解算是將多種傳感器組成的測量系統進行一個最優的在線數據融合。常用的數據融合算法有:卡爾曼濾波(KF),擴展卡爾曼濾波EKF(extendedkalmanfilter),無跡卡爾曼濾波UKF(unscentedKalmanfilter),梯度下降法,容積卡爾曼濾波CKF(cubatureKalmanfilter),粒子濾波PF(particlefilter),互補濾波CF(complementaryfilter)等。卡爾曼濾波是以最小均方誤差為原則的最佳線性濾波器,需要已知系統的狀態方程和量測方程,它的解是以估計值的形式給出的,相對維納濾波有實時性高、計算量小、功能強、用途廣等優勢。將UKF應用于姿態檢測的收斂速度、估計精度、穩定性都要高于EKF,同時不會增大計算量;CKF應用于飛行器姿態解算精度高于UKF,但計算量有所增加,影響小型飛行器的實時性[3]。因此,考慮主要選用卡爾曼濾波和UKF進行運動狀態解算。
1飛行器動力學模型
為了建立飛行器的動力學模型,不失一般性,對八旋翼飛行器做出如下假設:八旋翼飛行器為均勻對稱的剛體;慣性坐標系E的原點與飛行器幾何中心及質心位于同一位置;八旋翼飛行器所受阻力和重力不受飛行高度等因素影響,總保持不變;八旋翼飛行器各個方向的拉力與推進器轉速的平方成正比例。
圖1 八旋翼飛行器原理示意圖
(1)
式中:Fx、Fy、Fz分別為飛行器X、Y、Z坐標方向的合力;fkx、fky、fkz為對應的阻力;MA0、MA1、MB0、MB1、MC0、MC1、MD0、MD1為各個軸對應的力矩;Mfx、Mfy、Mfz為偏移、俯仰、橫滾3個方向阻力的合力矩。
2運動姿態模型
定義兩個坐標系來描述八旋翼飛行器的狀態,一個是地球坐標系,一個是飛行器機體坐標系。假設飛行器當前的坐標是依次繞Z軸旋轉角度φ,繞Y軸旋轉角度θ,繞X軸旋轉角度ψ得到的。如圖2所示。其坐標轉換矩陣為:
圖2 飛行器坐標變換
(2)
因此飛行器的運動角速度表示為:
(3)
式中wx、wy、wz分別為繞機體坐標旋轉的角速度。
3飛行器的運動狀態解算
文中選用的是開源飛控Pixhawk2.4,核心處理器為32位STM32F427,選用MPU6050作為姿態測量傳感器。MPU6050是一款9軸運動處理傳感器,它集成了三軸MEMES陀螺儀,三軸MEMES加速度計以及一個可擴展的數字運動處理器DMP,設計了有效消除陀螺儀和加速度計橫軸失調與離散的解決方案。
3.1飛行器的姿態解算
飛行器裝配的三軸陀螺儀可以實時的輸出飛行器的運動姿態數據,通過UKF濾波融合算法姿態解算可以得到飛行器的最佳姿態數據。

通過模擬仿真得到,經過融合濾波后的姿態角與理想值比較接近,偏差在0.2°以內,滿足飛行器的穩定性要求。
3.2飛行器的運動狀態解算
飛行器的三軸加速度計和光流傳感器配合使用,用于飛行器的運動速度測量。三軸加速度計可以測量飛行器的運動速度,但是其動態性能相對差,隨時間有累積誤差;光流傳感器測速相對三軸加速度計精度高,但是容易受到光線、距離的影響[4-5]。因此,飛行器低空穩定飛行及懸停時,選用光流傳感器測量值作為主要參考,用加速度計的值來修正[6]。
圖4為X、Y軸光流傳感器測得位移的濾波效果,可以看出濾波后的位移和理想值的接近程度很好,誤差較小同時沒有明顯累積誤差,相比加速度計測量效果好;圖5為X、Y軸的速度濾波效果。
圖3 三軸姿態角UKF濾波效果
3.3飛行器的高度解算
飛行器的氣壓計和超聲波配合使用,用于飛行器的高度測量,提高精度和可靠性。超聲波傳感器在低空下測高精確度很高,但是容易受到環境干擾[7]。氣壓計在室外環境下性能穩定,可以用于高空飛行時的高度測量。
圖6、圖7分別為飛行器在懸停和運動時超聲波和氣壓計測量值的濾波效果。可以看到,氣壓計的測量值經過濾波融合后精度明顯提高,與理想值的偏差在0.17m范圍內;而超聲波測量值經過濾波處理后
與理想值的偏差在0.03m內,誤差很小而且不隨時間推移明顯增大,實時性很高。
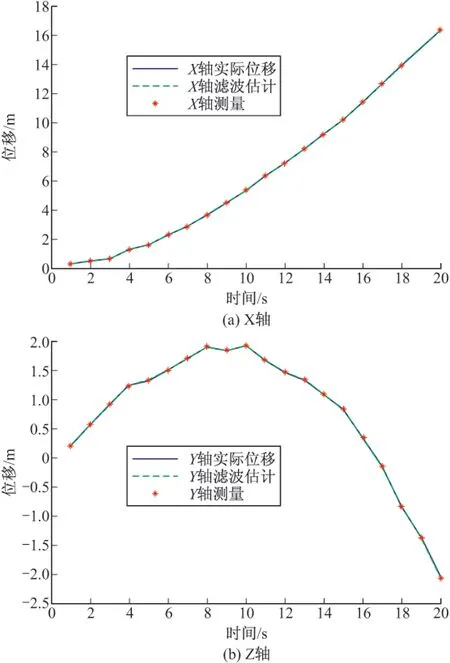
圖4 X、Y軸速度濾波效果

圖5 X、Y運動加速度濾波效果
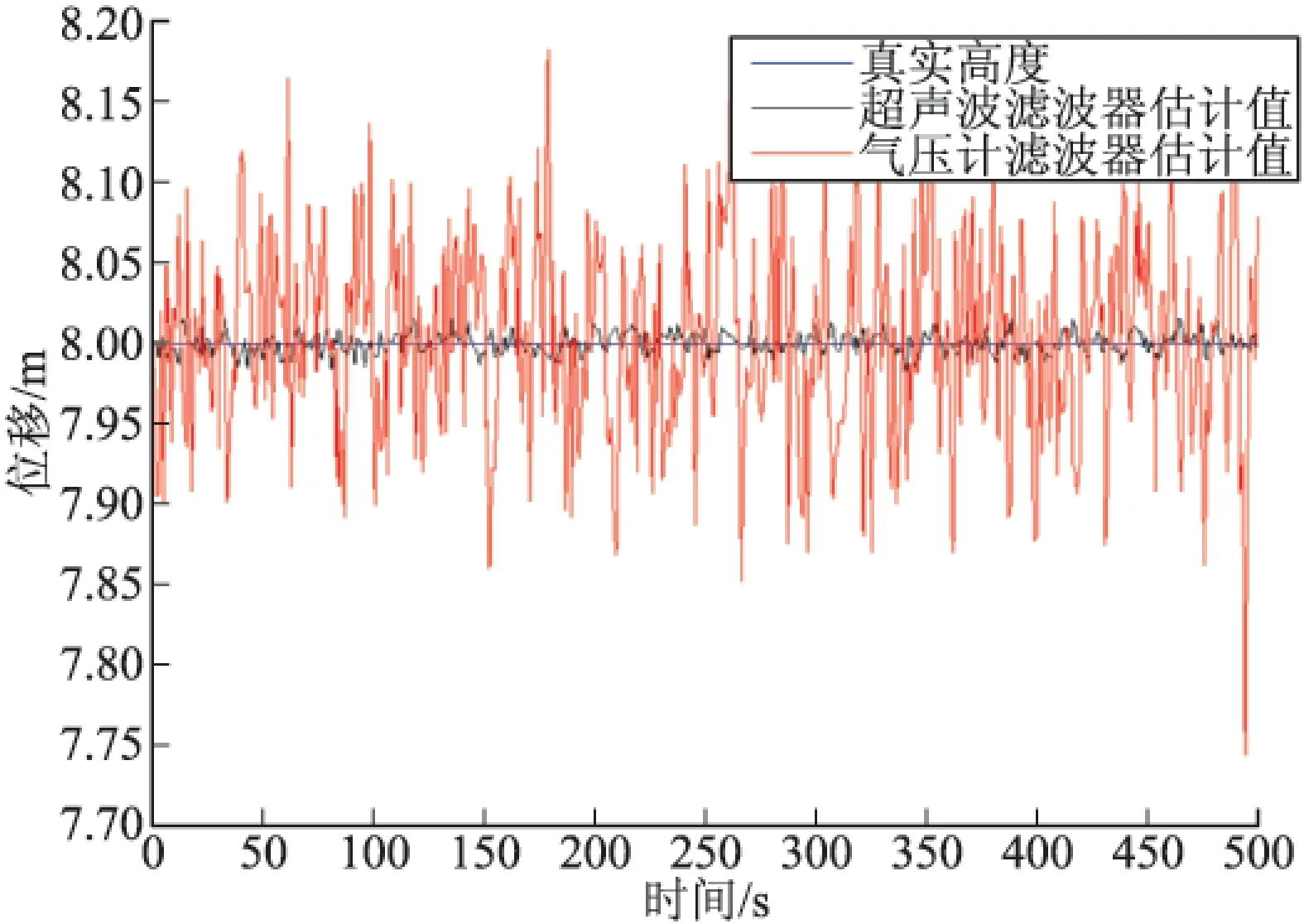
圖6 穩定懸停時濾波效果
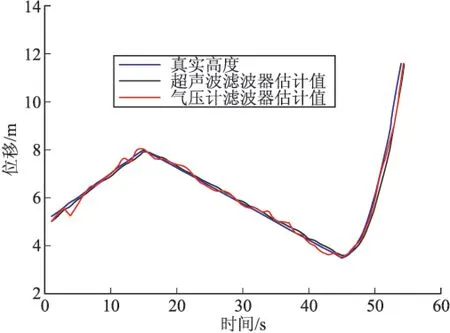
圖7 高度變換時濾波效果
4結論
鑒于八旋翼飛行器的優勢,文中主要結合飛行器的硬件特性和傳感器特性,設計濾波融合算法對它的姿態和狀態進行解算;經過驗證發現通過信息融合濾
波,飛行器的狀態信息得到很好的重現,滿足飛行器穩定控制的要求。同時發現濾波處理的收斂效果不是很好,可能是初始條件和濾波優化不夠好,是下一步工作的重點。
參考文獻:
[1]ADIRVictorG,STOICAAdrianM.IntegralLQRcontrolofastar-shapedoctorotor[J].IincasBulletin, 2012, 4(2): 3-18.
[2]ADIRVG,STOICAAM,WHIDBORNEJF.Modellingandcontrolofastar-shapedoctorotor[J].AppliedMechanicsandMaterials, 2013, 325/326: 994-998.
[3]郝曉靜, 李國新, 李明珠, 等. 無跡卡爾曼濾波算法在目標跟蹤中的研究 [J]. 電子設計工程, 2012, 20(13): 161-164.
[4]HONEGGERD,MEIERL,TANSKANENP,etal.AnopensourceandopenhardwareembeddedmetricopticalflowCMOScameraforindoorandoutdoorapplications[C]∥2013IEEEInternationalConferenceonRobaticsandAutomation, 2013: 1736-1741.
[5]劉小明, 陳萬春, 邢曉嵐, 等. 光流/慣導多傳感器信息融合方法 [J]. 北京航空航天大學學報, 2012, 38(5): 620-624.
[6]呂強, 倪佩佩, 王國勝, 等. 基于光流傳感器的四旋翼飛行器懸停校正 [J]. 裝甲兵工程學院學報, 2014, 28(3): 68-72.
[7]周倫. 室內移動機器人超聲波網絡定位方法研究 [D]. 哈爾濱: 哈爾濱工業大學, 2013.
*收稿日期:2015-04-15
作者簡介:趙世榮(1988-),男,山西孝義人,碩士研究生,研究方向:多旋翼飛行器設計及控制方法。
中圖分類號:V249.3
文獻標志碼:A
AttitudeEstimationofOctorotorAircraftBasedonInformationFusion
ZHAOShirong1,2,SUNYunqiang1,2,SHIXiling1,2
(1SchoolofInstrumentandElectronics,NorthUniversityofChina,Taiyuan030051,China;2NationalKeyLaboratoryforElectronicMeasurementTechnology,Taiyuan030051,China)
Abstract:In view of redundancy and load limitation of four rotor aircraft, the design of rotor aircraft was put forward A dynamic model of eight rotor aircraft was analyzed, its movement equation of state was established; UKF was designed to implement the aircraft attitude algorithm; Design of Kalman filter realized calculating speed and height of the aircraft. Theoretical analysis and simulation experiments show that the Kalman filtering algorithm can satisfy data calculation accuracy and convergence speed, meeting the requirements of vehicle stability.
Keywords:octorotor aircraft; information fusion; attitude estimation; unseented kalman filter