基于NAKF和DBN的液壓管路故障智能診斷方法*
2022-05-24 00:53:32姚存治張明真張尚然王冠群
機電工程 2022年5期
姚存治,張明真,張尚然,王冠群
(1.鄭州鐵路職業技術學院 人工智能學院,河南 鄭州 451460;2.河北石油職業技術大學,河北 承德 067000)
0 引 言
航空發動機液壓管路系統是航空發動機附件裝置的重要組成部分。在其服役過程中,由于疲勞、過載、碰撞等原因,容易造成其液壓管路的損傷[1]。
長期以來,由振動引起的航空發動機外部管路系統失效一直是影響發動機可靠性的重要問題之一[2-4]。因此,開展航空液壓管路振動失效機理研究,準確地發現其液壓管路的早期故障具有重大的意義。
深度學習具有很強的自學習能力和故障分類能力。它可以直接將采集到的原始振動信號輸入到模型之中,無需傳統算法的特征選擇和特征提取過程,因而被廣泛應用于各個領域中[5-7]。作為第一個提出的深度學習訓練算法,不管在應用還是算法的改進方面,研究人員都對深度信念網絡進行了廣泛的研究。它是目前得到研究和應用都比較廣泛的一種深度學習結構[8]。
盛肖煒等人[9]提出了一種基于參數優化的變分模態分解(variational modal decomposition, VMD)和改進的深度信念網絡的故障診斷方法。譚小鈺等人[10]提出了一種基于深度信念網絡和模糊模型的時變權重組合式預測模型,并采用該模型對光伏發電的功率進行了超短期預測。然而,上述研究主要是針對旋轉機械進行故障診斷和預測,目前尚未涉及到結構復雜和噪聲強大的液壓管路故障的診斷方面。
航空液壓管路系統由于具有高度復雜性和精密性,導致其管路振動信號呈現非線性、非平穩的特點。當航空液壓管路發生故障時,其故障特征信號常常會被設備的工作頻率、噪聲等淹沒,因此,需要對其原始信號進行降噪處理,以還原其實際的故障信號。目前常用的濾波方法有維納濾波器(Wiener filter,WF)[11],粒子濾波器(particle filter,PF)[12],卡爾曼濾波器(Kalman filter,KF)[13]。其中,卡爾曼濾波器可隨時算得新的參數濾波值,便于實時地處理觀測成果,因此,卡爾曼濾波被越來越多地應用于動態數據處理中。但是傳統卡爾曼濾波器只適用于處理線性信號,對于非線性信號的處理結果并不理想。因此,擴展卡爾曼濾波器(extended Kalman filter, EKF)[14]和無損卡爾曼濾波器(lossless Kalman filter, UKF)[15]應運而生。無損卡爾曼濾波器最適合于非線性信號的處理,但由于Sigma點集需滿足高斯分布,從而限制了無損卡爾曼濾波器的使用范圍。
因此,筆者在傳統卡爾曼濾波器的基礎上,利用最小二乘法修正構造的Sigma點,消除高斯分布對Sigma點影響,使其能夠適應任意分布;針對管路振動信號信噪比低及非穩定性強的特點,筆者用非線性自適應卡爾曼濾波器實現信號的自適應噪聲濾除,然后將濾波后的信號作為輸入數據,通過深度信念網絡學習深層特征;最后利用試驗數據將該方法與其他故障診斷方法進行對比與分析,完成液壓管路故障的智能分類識別。
1 非線性自適應卡爾曼濾波器
在航空液壓管路振動數據中,除了有用信號外,還包含一些噪聲。想要對液壓管路的故障進行準確分類,首先需要對其振動數據進行必要的預處理,以避免有用信號被噪聲干擾。
采用傳統卡爾曼濾波器(KF)能夠去除噪聲,還原真實的故障數據,但其只適用于線性系統,且其應用對象須服從高斯分布的特點。因此,筆者在卡爾曼濾波器的基礎上對其進行優化,提出了一種適應任意分布的非線性自適應卡爾曼濾波器(NAKF)。
當噪聲為未知噪聲,且噪聲隱含在觀測信號中時(叫做隱含噪聲),此時隱含噪聲形式如下:
(1)
對狀態變量進行擴展處理,可得到增廣狀態矩陣:
(2)
增廣狀態矩陣的均值和方差分別為:
(3)
式中:m—過程噪聲;l—觀測噪聲的維數;k—第k時刻狀態下的狀態矩陣。

(4)
式中:N—增廣狀態矩陣的維數。
利用最小二乘法修正構造的Sigma點,可以消除高斯分布對Sigma點影響,使其能夠適應任意分布。
最小二乘法的表達式如下:
(5)
對上式進行化簡,可求得其最優解為:
(6)
綜合上述公式描述,可得出非線性自適應濾波器狀態預測和狀態更新的表達式分別為:
狀態預測:
(7)
狀態更新:
(8)

根據上述非線性自適應卡爾曼濾波算法表達式可以看出,非線性自適應卡爾曼濾波器具有以下特點:
(1)非線性自適應卡爾曼濾波器在時域上具有較好適應性和遞歸運算效果;
(2)該濾波通過估計誤差的方差和噪聲協方差控制卡爾曼增益的變化,進而實現自適應的最優無偏估計;
(3)通過狀態預測和狀態更新交替迭代運行,使得該濾波器形成一個連續的動態系統,能夠對采集的時域信號做到實時濾波。
筆者將非線性自適應卡爾曼濾波器和原始卡爾曼濾波算法(filter of Kalman,FK)、擴展卡爾曼濾波算法(extended filter of Kalman,EFK)以及無跡卡爾曼濾波算法(unscented filter of Kalman,UFK)等濾波算法應用于仿真實例的信號降噪處理中,以進一步驗證它們之間的性質差異。
筆者選取原始代表信號方程為式(2),信號中加有信噪比為-12 dB的噪聲,形成帶有噪聲的仿真信號:
S=sin(20πt)+sin(40πt)+sin(60πt)
(9)
信噪比(signal-noise ratio,SNR)是模擬結果分析常用比較的參考值,是指原始信號與無噪聲的純信號之比。信噪比越大,噪聲越小。
筆者利用NAFK、UFK、EFK和KF等4種濾波方法對信號進行去噪處理,其結果如表1所示。

表1 4種濾波方法的對比結果
由表1可以看出,NAFK濾波后的信噪比為10.59,均大于其他算法的信噪比,說明NAFK算法可以獲得信號的真實值,在信號處理中比傳統的卡爾曼濾波效果更好。
原始信號和利用NAFK、UFK、EFK和KF等4種濾波方法處理后的時域波形圖如圖1所示。
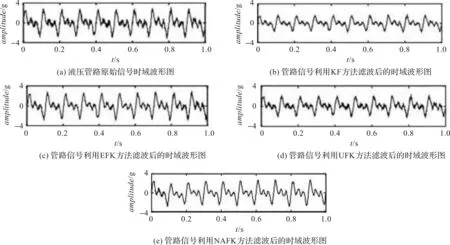
圖1 原信號和濾波后信號對比圖
由表1可以看出,利用NAFK方法對噪聲進行處理的效果最好,這是因為該算法根據非線性自適應中的最小二乘法對sigma點進行優化,使其能夠適應非線性、非平穩的液壓管路振動信號。同時也可以表明,NAFK算法能夠更好地識別有用信號,并且在用于估計目標的特征時能夠提高振動信號的信噪比。
2 深度信念網絡(DBN)
受限玻爾茲曼機(restricted Boltzmann machine,RBM)是一種神經感知器。它由一個顯層和一個隱層構成,兩層結構中的神經元均為二值單元,每個神經元的值為0或者1,每一層的RBM都是通過對比散度(contrastive divergence, CD)算法實現快速訓練。
受限玻爾茲曼機的結構圖如圖2所示。
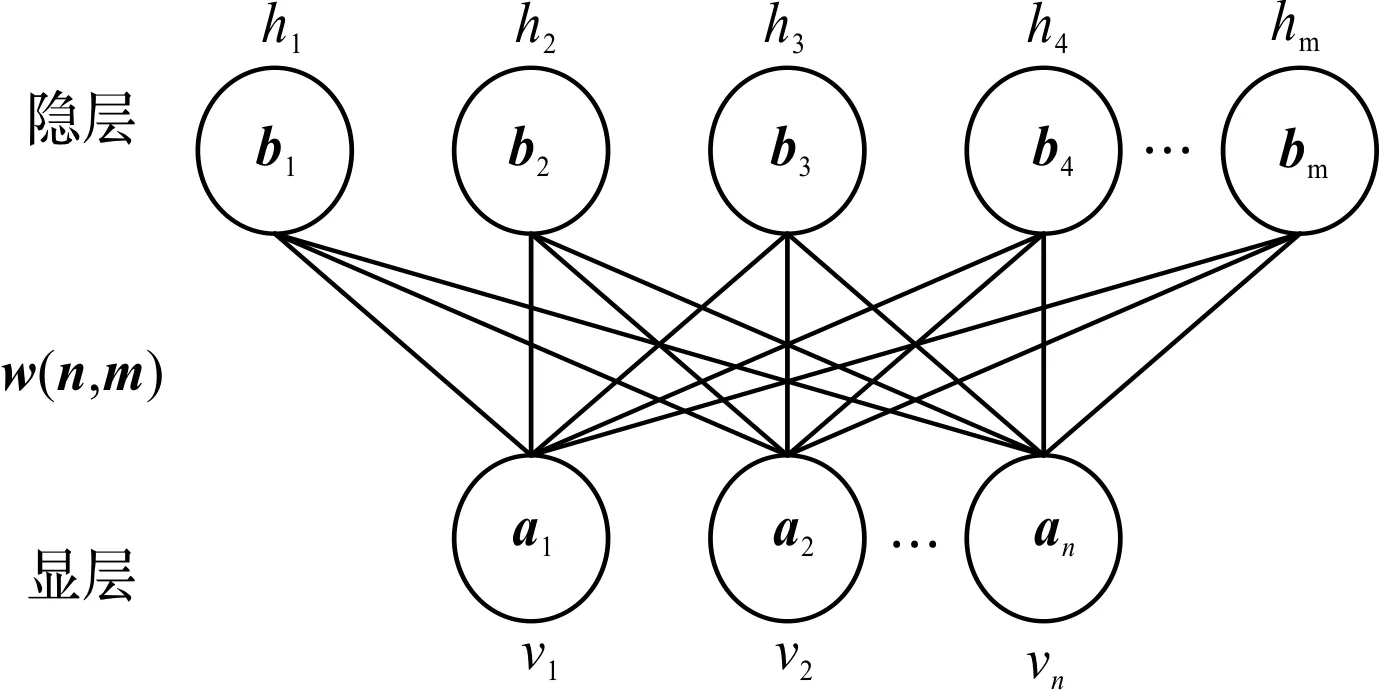
圖2 受限玻爾茲曼機結構圖
v—顯層;h—隱層;w—顯層和隱層的連接權值;a—顯層的偏置向量;b—隱層的偏置向量
RBM的能量函數可以表示為:
(10)
其中,在一層RBM中,隱層神經元被激活的概率為:
(11)
式中:σ—激活函數。
2.1 DBN結構原理
DBN屬于深度學習的一種常用網絡結構。由于它克服了淺層網絡的缺點,能更準確地發掘斜裂紋參數與其對應的振動響應之間的本質規律,提高預測的精度,近年來己經在許多領域得到了有效應用。此處,筆者采用DBN算法替代傳統的淺層學習算法,并建立基于DBN的斜裂紋參數預測模型。
深度信念網絡的核心是由多層受限玻爾茲曼機和一層反向傳播神經網絡組成,其中,受限玻爾茲曼機(RBM)的核心功能是做無監督的學習,通過遞推受限玻爾茲曼機,能夠將信息的特點反映到多種類的樣本空間中去;然后通過調用BP反向的傳導作有監督的學習,這樣會使RBM把已經通過訓練的特征因素設置為輸入端,使用參數,經過層層調整網絡,最終將模型的預測得以實現。
DBN結構原理圖如圖3所示。
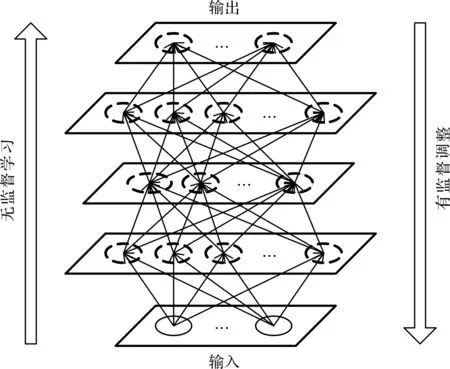
圖3 DBN結構原理圖
深度信念網絡由輸入層、隱含層和輸出層組成。在深度信念網絡模型構建的時候,首先需要確定隱含層層數、各隱含層節點個數、批尺寸(batch size)、學習率以及動量。深度信念網絡的隱含層由若干個RBM堆疊組成,通過RBM逐層地對數據進行特征提取,得到輸入數據抽象的高層特征,最后通過SoftMax將故障進行分類。
如果深度神經網絡層數及隱含層節點數過少時,相比于傳統的神經網絡,該網絡對原始數據抽象特征提取和建模能力并無優勢,而隱含層和節點數目過多的話學習效率又會下降,容易引發模型的過擬合;同時,模型的訓練時間會顯著地增加。
目前還沒有相關理論可以確定最優的網絡結構,需要結合實際的問題對深度信念網絡結構進行合理的構造,筆者采用正交試驗,通過對模型進行反復的訓練來確定網絡的最佳參數,使模型的預測性能達到最佳。
2.2 模型評價尺度
采用DBN方法進行故障診斷時,和其他方法相比其主要區別在于:(1)DBN方法的故障特征提取和分類器是組合在一起的,具有一定的普適性(筆者采用DBN輸入的是原始數據,不需要經過復雜的信號處理運算,不會受人為因素干擾,造成識別性能下降);(2)DBN方法是一種多層模型,相比較傳統的淺層診斷方法,可有效避免發生維數災難和診斷能力不足等問題。
因此,為了能夠更好地評價分類器對不均衡樣本的分類能力,在準確率的基礎上,筆者同時采用混淆矩陣和觀測者操作特性曲線(receiver operating characteristic,ROC)曲線進行評價。ROC反映了真陽率與假陽率的關系,曲線下的面積(area under curve,AUC)給出了分類器的綜合性能,一個完美分類器的AUC為1.0,隨機猜測的AUC為0.5。所以,AUC的值越大,分類器的性能越好。
3 基于DBN的液壓管路故障診斷流程
基于不均衡樣本驅動的民航發動機故障診斷模型主要包括DBN特征提取模型與集成分類器兩部分,即先利用訓練集對DBN與集成模型進行訓練,然后把訓練好的故障診斷模型應用到測試集進行評估。
基于NAKF與DBN的液壓管路故障診斷流程,如圖4所示。
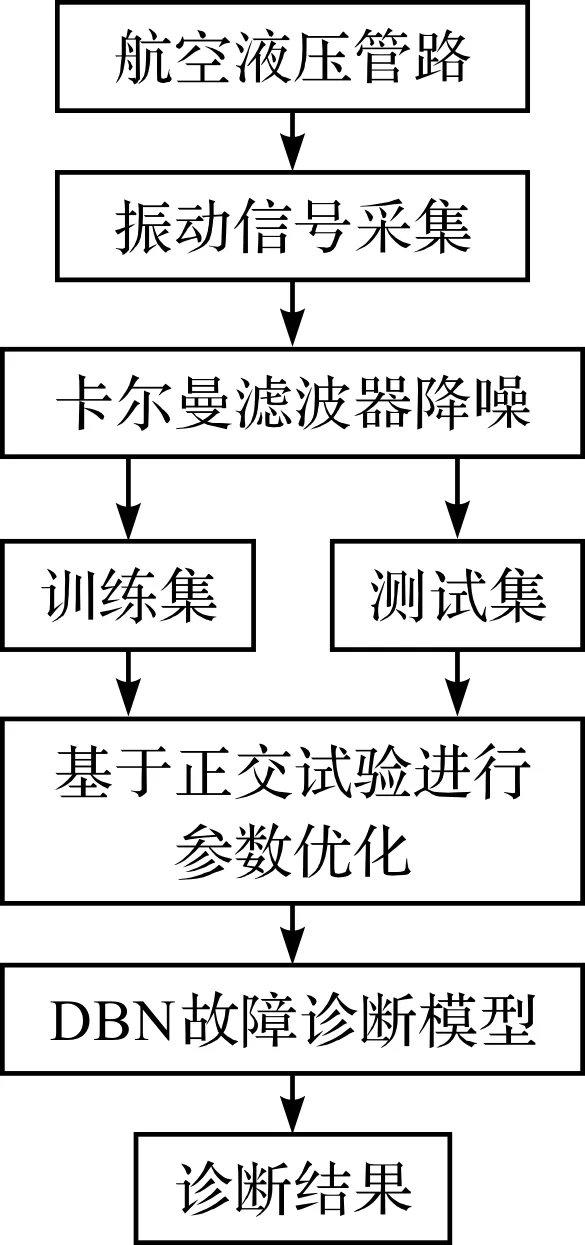
圖4 基于NAKF與DBN的液壓管路故障診斷流程
基于DBN的航發液壓管路故障診斷方法詳細步驟如下:
(1)收集故障樣本數據,構建故障樣本集;
(2)利用卡爾曼濾波器對振動信號進行降噪處理;
(3)對降噪后的樣本進行訓練集與測試集的劃分;
(4)采用正交試驗對DBN的參數進行選取;
(5)利用訓練好的DBN特征提取模型對測試集進行故障診斷;
(6)統計模型故障診斷結果,選取相應指標進行評估。
4 實驗及結果分析
4.1 實驗說明
筆者選取管徑為14 mm、壁厚為2 mm、長度為50 mm、材質為304不銹鋼的航空液壓管路作為實驗對象,其中,直管6種(無故障管1種、故障管5種)、90°彎管3種(無故障管1種、故障管2種),每種管路上選取3個測點(直管測點分別在管路的1/4、中點與3/4處,彎管測點分別在兩個彎點以及中點處)分別命名為K1、K2、K3。
液壓管路具體參數如表2所示。
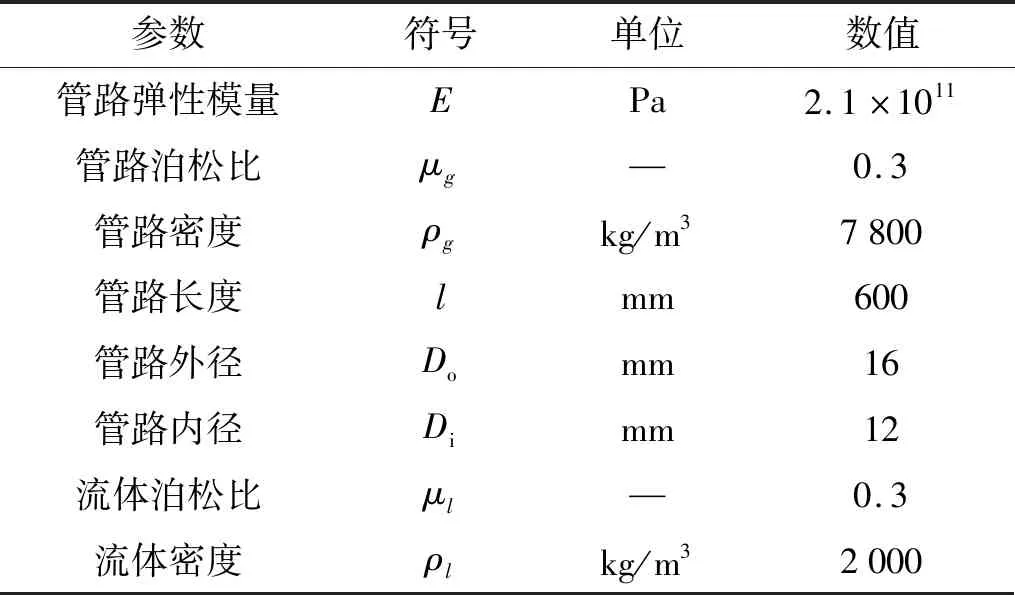
表2 液壓管路的材料參數和幾何尺寸
為了對上述液壓管路進行有效的故障診斷實驗,以得到更具有代表性的故障特征數據,筆者首先對該管路進行故障植入。筆者所選取的基本管路故障類型為:軸向裂紋、徑向裂紋以及凹坑。所有的裂紋故障均由激光線切割植入,裂紋長度均為10 mm,深度為1 mm。凹坑故障則由模擬管路碰撞得來,用重器對管路進行敲擊從而植入凹坑故障。
具體的液壓管路故障情況如表3所示。
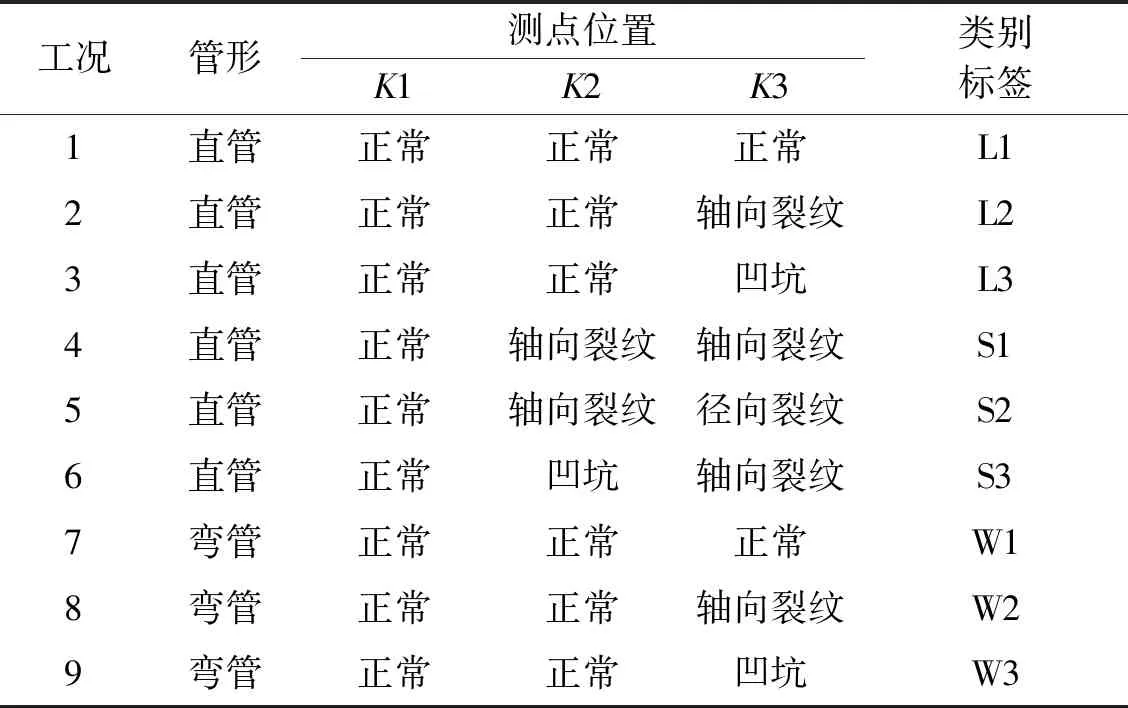
表3 管路故障情況
為了驗證上述故障診斷方法的有效性,筆者針對航空發動機液壓管路進行故障植入實驗,采集相關數據,并對其進行處理。
此處的液壓管路試驗裝置主要由電動機、柱塞泵、變頻器、節流閥、油箱、管路系統和控制系統等組成。實驗中,筆者使用3個加速度傳感器同步采集液壓管路的振動數據,分別在測量管路兩端和管路中間3個位置的加速度。
液壓管路振動數據采集實測圖如圖5所示。
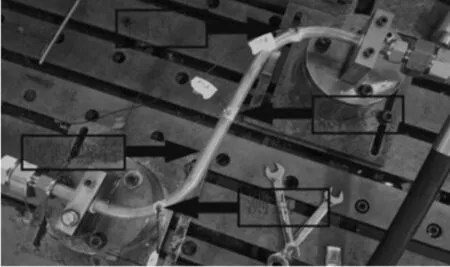
圖5 液壓管路振動數據采集實測圖
試驗參數設置如表4所示。
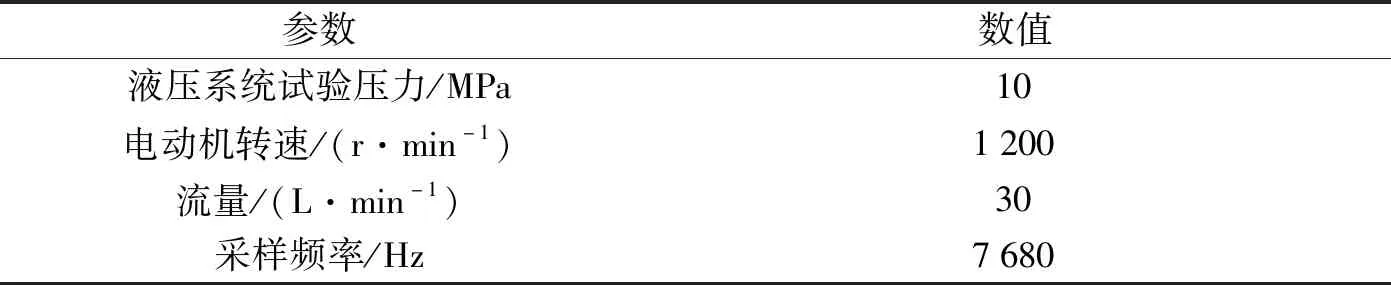
表4 液壓直管材料參數與幾何尺寸
4.2 數據集創建與DBN參數設計
由于液壓管路的故障特征信息受管路復雜結構和流固耦合振動特性等因素影響,導致其早期的故障表征不明顯,為避免故障信息遺漏,筆者將濾波后的振動信號以相等的窗口長度進行劃分(每個樣本包含600個數據點,每種故障400個樣本,即生成一個3 600×600維的數據樣本),并將數據集劃分為訓練集與測試集(訓練樣本數量和預測樣本數量的比例為8∶2)。
已有的研究發現,對DBN分類能力影響較大的參數主要由:隱藏層數(l)、隱藏層單元數(e)、批尺寸(batch size)、學習率(alpha)和動量(momentum)。利用正交試驗方法設計DBN參數能夠找出診斷結果的主要影響因素,并且效率較高,各個參數的取值參考李海平等人在相關文獻中的設定,正交試驗的因素與水平為:
A:隱藏層數(l):l1=2,l2=3,l3=4,l4=5;
B:隱藏層單元數(e):e1=512-512……,e2=512-256……;
C:批尺寸(b):b1=15-5,b2=20-20;
D:學習率(a):a1=0.000 1,a2=0.001;
E:動量(m):m1=0.9,m2=0.8;
因此,筆者定義的正交試驗設計屬于混合水平,所用正交表為L8(41×24),其中,平均值m值和極差R的計算公式如下:
(12)
R=max{m1,…,mqi}-min{m1,…,mqi}
(13)
式中:qi—因素的水平數;y(K(qi))—第Ki個因素第qi個水平的結果;R—極差,可以為各因子對最后結果的影響程度排序。
正交實驗參數表如表5所示。
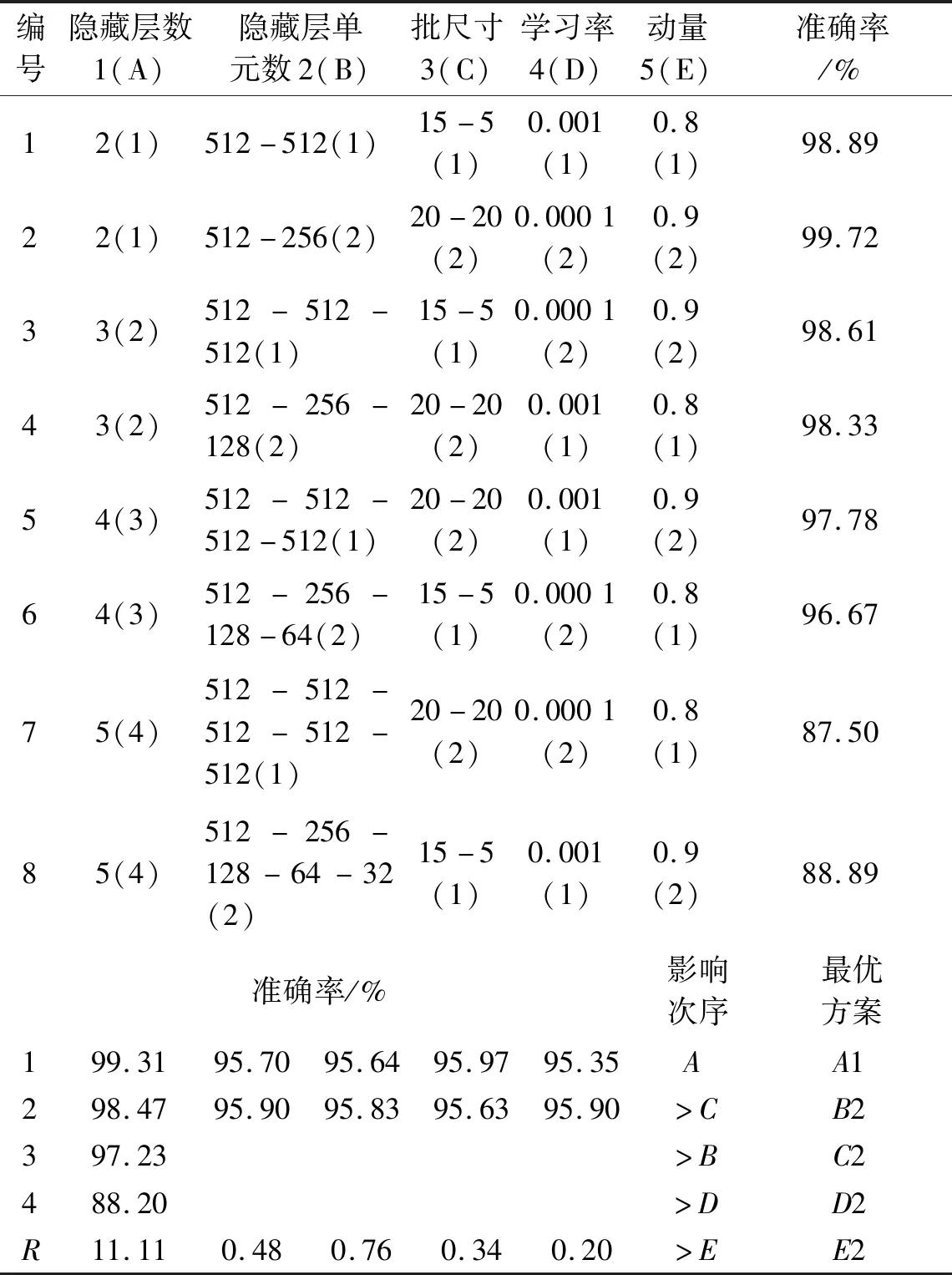
表5 正交實驗參數表
由表5可以看出:2號試驗(A1B2C2D2E2)實驗準確率最高為99.72%,進一步通過平均值K和極差R分析當前結果是否為最優方案;通過R值可以發現,A因素(隱藏層數,即RBM個數)對準確率的影響最大,其他因素對準確率影響不大;由K值分析之后可得,A1B1C2D1E2(隱藏層數為2,隱藏層單元數為512-512,批尺寸為20-20,學習率為0.001,動量為0.9)組合可能準確率更高,實驗得到結果為99.72%,進一步說明當對準確率影響大的A因素確定后,其他因素對結果影響較小。
為驗證DBN模型的穩定性,筆者將數據集采用隨機抽取的訓練方式(DBN的結構參數為A1B2C2D2E2)進行實驗,得到了管路數據測試集的預測值與真實值的對比結果,如圖6所示。
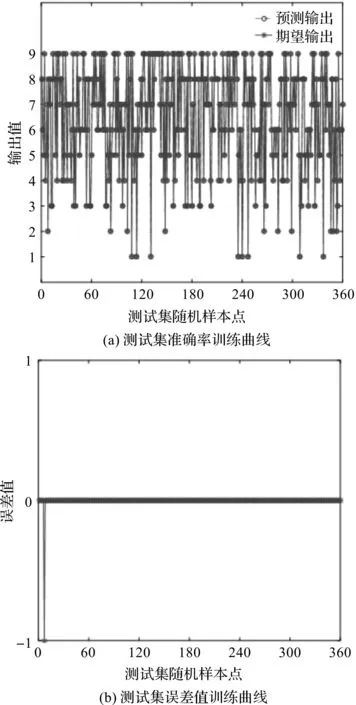
圖6 管路數據測試集訓練圖
由圖6可看出,測試集中只有一個樣本分類錯誤,證明其診斷準確率較高。
為了驗證其算法,筆者選取3種方法進行對比(統一基于同一數據集,并降維到300)。各自算法相關參數設置如下:
(1)NAKF+BPNN。采用300-128-9,學習率a=0.000 1;
(2)NAKF+SVM。核函數選擇徑向基函數(radial basis function, RBF),設置懲罰因子c=0.062 5,核函數參數g=0.062 5,停止訓練誤差精度設為0.000 1;
(3)原始信號+DBN。DBN的參數選擇隱藏層數為2,隱藏層單元數為512-256,批尺寸為20-20,學習率為0.000 1,動量為0.9。
為了避免偶然性,筆者對其進行了10次隨機試驗,并將10次試驗的分類正確率進行平均處理。
最終得到了數據集的訓練結果,如圖7所示。
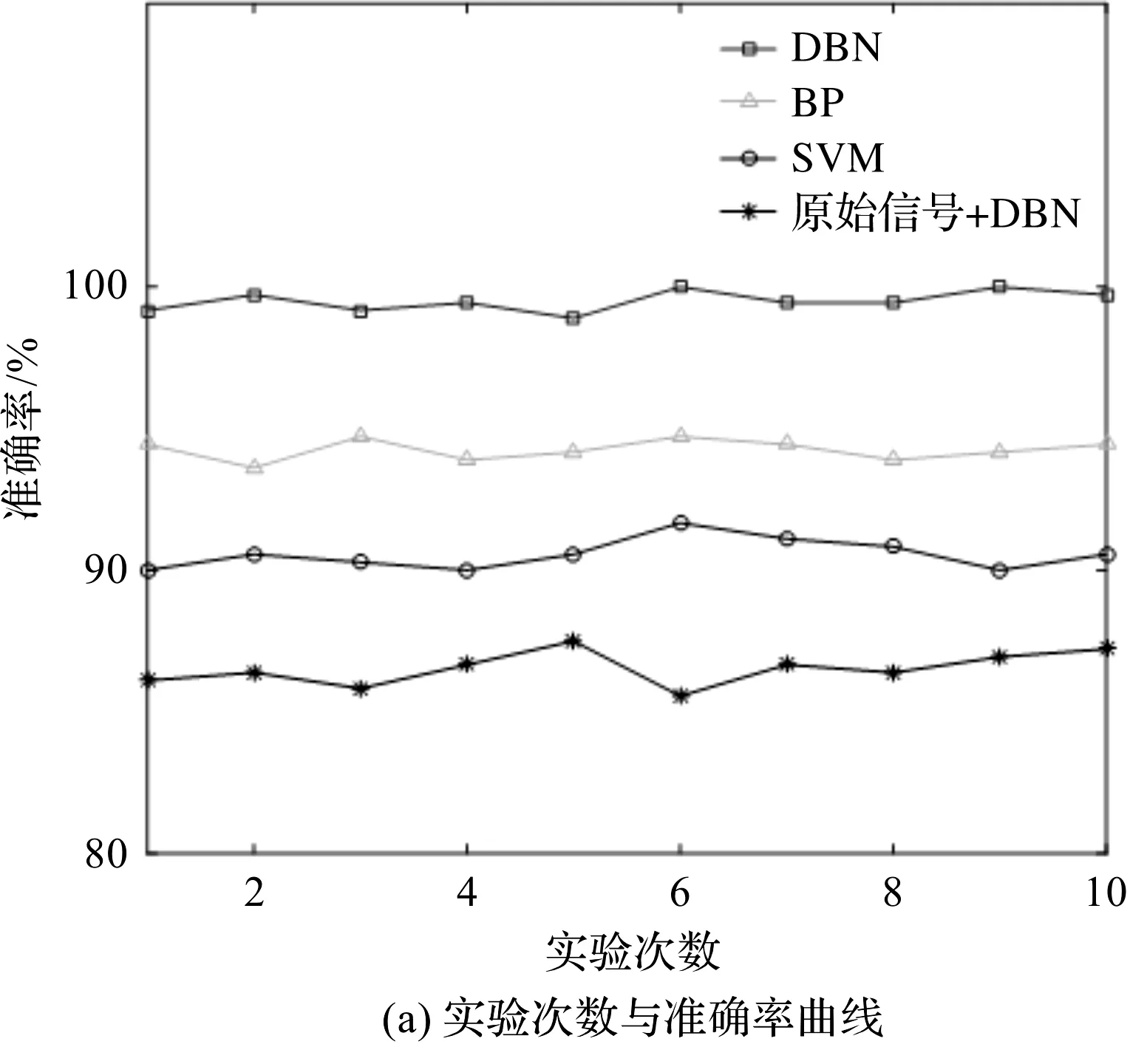
圖7 管路數據診斷的平均準確率
由圖7可見,NAKF-DBN算法在訓練測試集上準確率達到99.50%。傳統的淺層算法如BPNN和支持向量機的分類準確率最高不超過95%,而未經NAKF濾波的DBN網絡準確率只有86.58%,并且為了更加直觀地展示各個模型的實驗效果,各個模型的混淆矩陣以及各個模型的ROC如圖8~11所示。
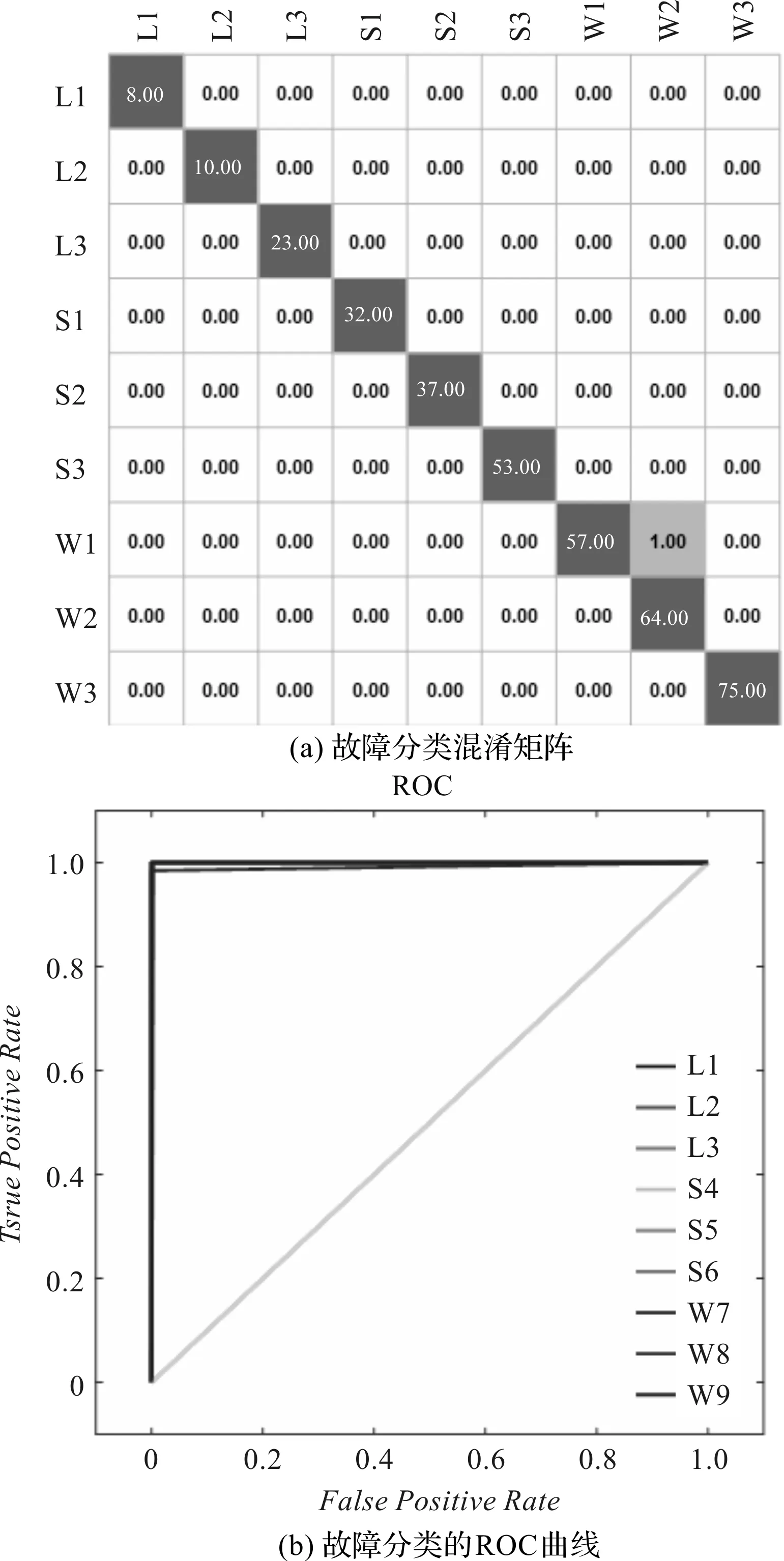
圖8 NAKF-DBN模型識別結果
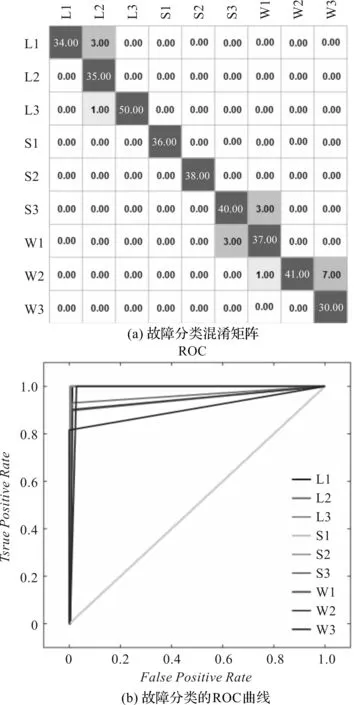
圖9 BPNN模型識別結果
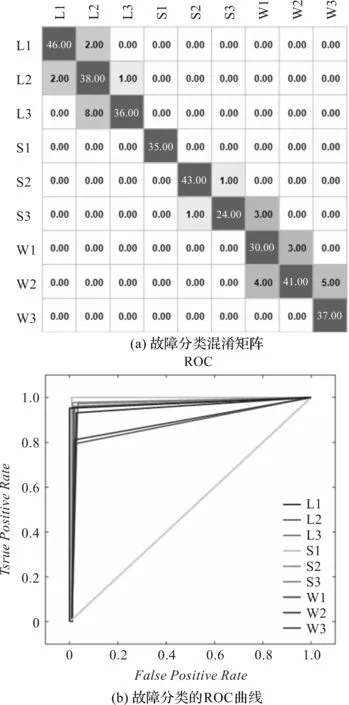
圖10 SVM模型識別結果
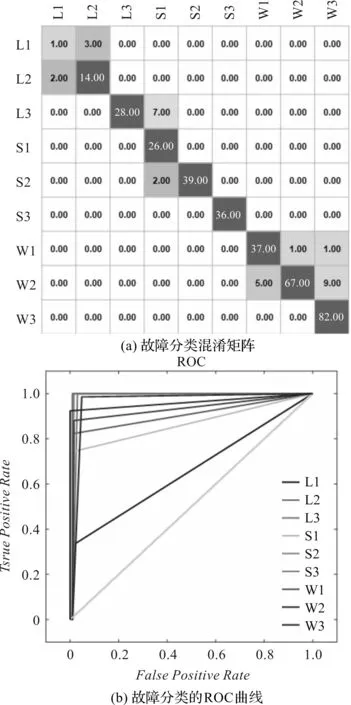
圖11 原始信號+DBN模型識別結果
在該次分類中,各種模型的混淆矩陣如圖(8~11)中的(a)圖所示,其中,NAKF-DBN的正確識別率最高,為99.72%,只有一個彎管正常狀態被錯誤的識別為裂紋故障狀態;未經過濾波處理時的準確率最低,為91.67%,說明未濾波處理直接進行故障分類會導致錯誤率提高;同時,通過觀察錯誤率發生的情況,可以發現被錯分的樣本基本集中在矩陣右下角,說明彎管正常與故障狀態比較容易混淆。
NAKF-DBN與DBN模型的ROC曲線如圖(8,11)的(b)圖所示,可以發現,DBN利用經過NAKF去噪后的信號作為輸入比單一的DBN利用原始數據作為輸入分類能力強。
BPNN與SVM模型的ROC曲線如圖(9,10)的(b)圖所示,可以看出,NAKF-DBN的分類能力要好于BPNN與SVM,說明筆者模型的分類能力要好于傳統淺層網絡。
通過上述對比實驗,說明在結合DBN與濾波技術之后,筆者提出的模型對于高維度、多種類故障樣本有很好的分類能力。
5 結束語
航空發動機中的液壓管路早期故障信號微弱,且其受噪聲污染嚴重,致使液壓管路故障識別困難,針對這一問題,筆者提出了一種基于非線性自適應卡爾曼濾波器(NAKF)及深度信念網絡(DBN)的液壓管路故障狀態識別新方法,即首先在傳統卡爾曼濾波器的基礎上,利用最小二乘法修正構造的Sigma點,消除高斯分布對Sigma點影響,并針對管路振動信號信噪比低及非穩定性強的特點,用非線性自適應卡爾曼濾波器實現信號的自適應噪聲濾除;然后將濾波后的信號作為輸入數據,通過深度信念網絡學習深層特征;最后利用試驗數據將該方法與其他故障診斷方法進行對比與分析,完成對液壓管路故障的智能分類識別。
研究結論如下:
(1)在傳統卡爾曼算法的基礎上,使用非線性自適應濾波器進行了優化,消除了高斯分布對Sigma點的影響,提高了真實信號的還原度,有效解決了卡爾曼算法的適應性問題。并通過仿真實驗分析確定了該濾波方法的可行性,對比標準KF,EKF,UKF方法對仿真數據的降噪效果,證明降噪后的信號具有更高的信噪比;
(2)為解決工程實際中液壓管路結構復雜、故障類型多樣造成的診斷困難問題,筆者利用非線性自適應卡爾曼濾波器去除噪聲,然后利用DBN學習深層故障特征,進而實現了航空液壓管路的智能診斷。將原始振動信號和濾波后的信號作為DBN輸入,后者的分類準確率在99%以上,驗證了NAKF對實際液壓管路振動信號去噪的有效性;與SVM,BPNN等傳統淺層網絡模型進行了對比,結果表明:在分類準確率和ROC曲線兩類評價指標下,筆者提出的分類模型準確率最高,對每種故障都有良好的分類能力。
綜上所述,針對航空發動機外部液壓管路的結構特點,探討更為簡潔、高效和通用的空間液壓管路故障診斷模型,這是筆者下一步需要深入研究的重點。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
汽車維護與修理(2016年10期)2016-07-10 08:17:41
電源技術(2016年9期)2016-02-27 09:05:39
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
電源技術(2015年1期)2015-08-22 11:16:28
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31